工业机器人腕部结构分类、结构特点24页PPT
合集下载
第3章3.3 机器人腕部结构

1) 1液.压1 直工接业驱机动器三人自由的度基手本腕概念
2020/2/27
33
3.3 机器人腕部结构 3 三自由度手腕
2) 1齿.轮1 链工轮业传机动器三人自由的度基腕本部概念
俯仰 偏转
回转
2020/2/27
❖ 结构特点: ▪ 该机构为 由齿轮、 链轮传动 实现的偏 转、俯仰 和回转三 个自由度 运动的手 腕结构。
轴主动
行星运动
齿轮固 定不动
2020/2/27
31
3.3 机器人腕部结构
2020/2/27
2 二自由度手腕
俯仰 1.1 工业机器人的基本概念❖思考?
▪ 图中所示的情况,当 S轴不输入,只有B轴 输入时,腕部存在哪
些运动,为什么?
回转
齿轮传动回转和俯仰型腕部原理
32
3.3 机器人腕部结构
3 三自由度手腕
6
3.3 机器人腕部结构
2020/2/27
2 腕部的转动
滚转1:.能1 实工现业36机0°器无人障的碍基旋本转的概关念节运动,通常用R来标记。
弯转:转动角度一般小于360°。弯转通常用B来标记。
滚转可以实现腕部的旋转;弯转可以实现腕部的弯曲
7
3.3 机器人腕部结构
2020/2/27
3.3.2
1 单1.自1由工度业腕机部器人的基本概念
俯仰
偏转
回转
齿轮链轮传动三自由度手腕原理图
1—油缸;2—链轮;3、4—锥齿轮;5、6—花键轴T;7—传动轴S;8—腕架;9—行星架;10、11、22、24—圆
38 柱齿轮;12、13、14、15、16、17、18、20—锥齿轮;19—摆动轴;21、23—双联圆柱齿轮;25—传动轴B
2020/2/27
33
3.3 机器人腕部结构 3 三自由度手腕
2) 1齿.轮1 链工轮业传机动器三人自由的度基腕本部概念
俯仰 偏转
回转
2020/2/27
❖ 结构特点: ▪ 该机构为 由齿轮、 链轮传动 实现的偏 转、俯仰 和回转三 个自由度 运动的手 腕结构。
轴主动
行星运动
齿轮固 定不动
2020/2/27
31
3.3 机器人腕部结构
2020/2/27
2 二自由度手腕
俯仰 1.1 工业机器人的基本概念❖思考?
▪ 图中所示的情况,当 S轴不输入,只有B轴 输入时,腕部存在哪
些运动,为什么?
回转
齿轮传动回转和俯仰型腕部原理
32
3.3 机器人腕部结构
3 三自由度手腕
6
3.3 机器人腕部结构
2020/2/27
2 腕部的转动
滚转1:.能1 实工现业36机0°器无人障的碍基旋本转的概关念节运动,通常用R来标记。
弯转:转动角度一般小于360°。弯转通常用B来标记。
滚转可以实现腕部的旋转;弯转可以实现腕部的弯曲
7
3.3 机器人腕部结构
2020/2/27
3.3.2
1 单1.自1由工度业腕机部器人的基本概念
俯仰
偏转
回转
齿轮链轮传动三自由度手腕原理图
1—油缸;2—链轮;3、4—锥齿轮;5、6—花键轴T;7—传动轴S;8—腕架;9—行星架;10、11、22、24—圆
38 柱齿轮;12、13、14、15、16、17、18、20—锥齿轮;19—摆动轴;21、23—双联圆柱齿轮;25—传动轴B
工业机器人的组成PPT课件
2019/9/22
19
四、传感部分 2. 机器人-环境交互系统
• 机器人-环境交互系统实现工业机器人与外部环境中 的设备相互联系和协调的系统。
• 工业机器人与外部设备集成为一个功能单元, 如加工制造 单元、多台机器人、多台机床或设备、多个零件存储装 置等集成为一个去执行 复杂任务的功能单元。
2019/9/22
2019/9/22
17
用途
机器人的精确控制
检测的信息
位置、角度、速度、加速度、姿 态、方向等
内部传感器
所用传感器
微动开关、光电开关、差动变压 器、编码器、电位计、旋转变压 器、测速发电机、加速度计、陀 螺、倾角传感器、力(或力矩) 传感器
2019/9/22
18
用途
了解在工件、环境或机器人在环境中的状态、 对工件的灵活、有效的操作
• 伺服控制器控制各个关节的驱动器。
2019/9/22
16
四、传感部分 1. 感受系统
• 感受系统包括内部检测系统与外部检测系统两部分。
• 内部检测系统的作用就是通过各种检测器,检测执行机构的运动境况,根 据需要反馈给控制系统,与设定值进行比较后对执行机构进行调整以保证 其动作符合设计要求。
• 外部检测系统检测机器人所处环境、外部 物体状态或机器人与外部物体的关系。
工业机器人的组成
Hale Waihona Puke 主要内容• 系统组成 • 机械部分 • 控制部分 • 传感部分
2019/9/22
2
一、系统组成
• 工业机器人由国际标准化组织正式定义为“自动控制的可重复编程的多功 能机械手”。
• 根据系统结构特点,工业机器人由三大部分6个子系统组成。
机器人的组成结构(PPT52页)
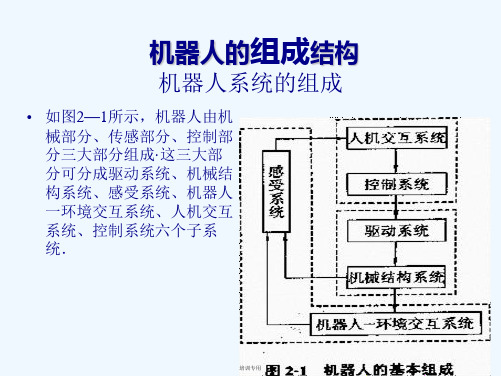
• 感受系统 它由内部传感器模块和外部传感器模块组成,获 取内部和外部环境状态中有意义的信息.智能传感器的使 用提高了机器人的机动性、适应性和智能化的水准.人类 的感受系统对感知外部世界信息是极其灵巧的,然而,对 于一些特殊的信息,传感器比人类的感受系统更有效.
• 机器人一环境交互系统 机器人一环境交互系统是实现机器人与外部环境中的设备相 互联系和协调的系统.机器人与外部设备集成为一个功能单 元,如加工制造单元、焊接单元、装配单元等
度,即重复度。
培训专用
工作空间(Working space):机器人手腕 参考点或末端操作器安装点(不包括末端 操作器)所能到达的所有空间区域,一般 不包括末端操作器本身所能到达的区域。
培训专用
工业机器人的机械结构
工业机器人的机械本体类似于具备上肢机能的机械手 ,由 手部、腕部、臂、机身(有的包括行走机构)组成。
培训专用
• 正弦波电动机(交流无刷伺 服电动机):顾名思义,它 是由正弦波电流驱动的。对 三相情况,电流相位差 120。,而且这三相电流是 随转子位置不同而不同的, 也就是说,转子的位置检测 需更精确,驱动电路也比梯 形波电动机的更复杂,但却 代表着无刷电动机最高水平, 因为它能保持恒定转矩输出
培训专用
加入速度反馈。一般直流电动机和位置反馈、速度反馈形成 一个整体,即通常所说的直流伺服电机。由于采用闭环伺 服控制,所以能实现平滑的控制和产生大的力矩
• 当今大部分机器人都采用直流伺服电机驱动机器人的各个关节, 但它们也有一些缺点,如转速不能太高
• 近年来,新发展起来的无刷直(交)流伺服电动机克服了 上述缺点,并保留了直流伺服电动机的优点,因此无刷电 动机逐渐取代了直流伺服电动机
培训专用
相关术语及性能指标
• 机器人一环境交互系统 机器人一环境交互系统是实现机器人与外部环境中的设备相 互联系和协调的系统.机器人与外部设备集成为一个功能单 元,如加工制造单元、焊接单元、装配单元等
度,即重复度。
培训专用
工作空间(Working space):机器人手腕 参考点或末端操作器安装点(不包括末端 操作器)所能到达的所有空间区域,一般 不包括末端操作器本身所能到达的区域。
培训专用
工业机器人的机械结构
工业机器人的机械本体类似于具备上肢机能的机械手 ,由 手部、腕部、臂、机身(有的包括行走机构)组成。
培训专用
• 正弦波电动机(交流无刷伺 服电动机):顾名思义,它 是由正弦波电流驱动的。对 三相情况,电流相位差 120。,而且这三相电流是 随转子位置不同而不同的, 也就是说,转子的位置检测 需更精确,驱动电路也比梯 形波电动机的更复杂,但却 代表着无刷电动机最高水平, 因为它能保持恒定转矩输出
培训专用
加入速度反馈。一般直流电动机和位置反馈、速度反馈形成 一个整体,即通常所说的直流伺服电机。由于采用闭环伺 服控制,所以能实现平滑的控制和产生大的力矩
• 当今大部分机器人都采用直流伺服电机驱动机器人的各个关节, 但它们也有一些缺点,如转速不能太高
• 近年来,新发展起来的无刷直(交)流伺服电动机克服了 上述缺点,并保留了直流伺服电动机的优点,因此无刷电 动机逐渐取代了直流伺服电动机
培训专用
相关术语及性能指标
工业机器人课件2.2手部设计-2.3腕部设计

No.39
类人机器人的手部
具有多关节的三指手
No.40
类人机器人的手部
1
4
2
3
5
6
11 10
7
9
8
1,9-适应弹簧 2,3,8-连杆 4-食指 5-中指 6-无名指 7-小指 10-蜗轮 11-驱动杆
贝尔格莱德手
No.41
BH-4型灵巧手有四个 手指,每个手指有4个关节, 4个手指共16个自由度,其 关节由齿轮传动,包括直流 伺服电机、行星减速器和光 码盘在内的电机单元驱动。 光码盘用于测量电机轴相对 转角,关节轴绝对转角由电 位计测量。
在张启先院士的主持下, 北京航空航天大学机器人 研究所于80年代末开始 灵巧手的研究与开发。
灵巧手有三个手指,每 个手指有3个关节,3个 手指共9个自由度,微电 机放在灵巧手的内部,各 关节装有关节角度传感器, 指端配有三维力传感器, 采用两级分布式计算机实 时控制系统。
北航研制的BH-3灵巧手 北航研制的BH-4灵巧手 No.42
No.16
二、传动机构——其它结构型式
重力式手爪
No.17
二、传动机构——其它结构型式
拨杆杠杆式钳爪
No.18
二、传动机构——其它结构型式
内撑式三指钳爪
No.19
2.2.1 钳爪式手部的设计
三、钳爪式手部的设计要点
应具有足够的夹紧力 应具有足够的张开角 应能保证工件的可靠定位 应具有足够的强度和刚度 应适应被抓取对象的要求 应尽量做到结构紧凑、重量轻、效率高 应具有一定的通用性和可互换性
2.2 手部设计
SIWR-Ⅰ型和Ⅱ型水下作业机械手模拟试验装置
No.1
2.2 手部设计
新松的装配机器人
类人机器人的手部
具有多关节的三指手
No.40
类人机器人的手部
1
4
2
3
5
6
11 10
7
9
8
1,9-适应弹簧 2,3,8-连杆 4-食指 5-中指 6-无名指 7-小指 10-蜗轮 11-驱动杆
贝尔格莱德手
No.41
BH-4型灵巧手有四个 手指,每个手指有4个关节, 4个手指共16个自由度,其 关节由齿轮传动,包括直流 伺服电机、行星减速器和光 码盘在内的电机单元驱动。 光码盘用于测量电机轴相对 转角,关节轴绝对转角由电 位计测量。
在张启先院士的主持下, 北京航空航天大学机器人 研究所于80年代末开始 灵巧手的研究与开发。
灵巧手有三个手指,每 个手指有3个关节,3个 手指共9个自由度,微电 机放在灵巧手的内部,各 关节装有关节角度传感器, 指端配有三维力传感器, 采用两级分布式计算机实 时控制系统。
北航研制的BH-3灵巧手 北航研制的BH-4灵巧手 No.42
No.16
二、传动机构——其它结构型式
重力式手爪
No.17
二、传动机构——其它结构型式
拨杆杠杆式钳爪
No.18
二、传动机构——其它结构型式
内撑式三指钳爪
No.19
2.2.1 钳爪式手部的设计
三、钳爪式手部的设计要点
应具有足够的夹紧力 应具有足够的张开角 应能保证工件的可靠定位 应具有足够的强度和刚度 应适应被抓取对象的要求 应尽量做到结构紧凑、重量轻、效率高 应具有一定的通用性和可互换性
2.2 手部设计
SIWR-Ⅰ型和Ⅱ型水下作业机械手模拟试验装置
No.1
2.2 手部设计
新松的装配机器人
机器人本体结构_图文
腕部及手部结构
机器人腕部结构的基本形式和特点
机器人的手部作为末端执行器是完成抓握工件或执行特定作业的重要部件,也需要有多种结构。腕部是 臂部与手部的连接部件,起支承手部和改变手部姿态的作用。目前,RRR型三自由度手腕应用较普遍。
腕部是机器人的小臂与末端执行器(手部或称手爪)之间的连接部件,其作用是利用自身的活动度确定手部 的空间姿态。对于一般的机器人,与手部相连接的手腕都具有独驱自转的功能,若手腕能在空间取任意 方位,那么与之相连的手部就可在空间取任意姿态,即达到完全灵活。 从驱动方式看,手腕一般有两种形式,即远程驱动和直接驱动。直接驱动是指驱动器安装在手腕运动关 节的附近直接驱动关节运动,因而传动路线短,传动刚度好,但腕部的尺寸和质量大,惯量大。远程驱 动方式的驱动器安装在机器人的大臂、基座或小臂远端上,通过连杆、链条或其他传动机构间接驱动腕 部关节运动,因而手腕的结构紧凑,尺寸和质量小,对改善机器人的整体动态性能有好处,但传动设计 复杂,传动刚度也降低了。 按转动特点的不同,用于手腕关节的转动又可细分为滚转和弯转两种。滚转是指组成关节的两个零件自 身的几何回转中心和相对运动的回转轴线重合,因而能实现360°无障碍旋转的关节运动,通常用R来标 记。弯转是指两个零件的几何回转中心和其相对转动轴线垂直的关节运动。由于受到结构的限制,其相 对转动角度一般小于360°。弯转通常用B来标记。
一、腕部的自由度
手腕按自由度个数可分为单自由度手腕、二自由度手腕和三自由度手腕。
腕部实际所需要的自由度数目应根据机器人的工作性能要求来确定。在有些情况下,腕部具 有两个自由度,即翻转和俯仰或翻转和偏转。一些专用机械手甚至没有腕部,但有些腕部为 了满足特殊要求还有横向移动自由度。
6种三自由度手腕的结合方式示意图
工业机器人的分类及应用PPT课件

16/28
y z x
返回 目录
1.4 工业机器人的分类及应用
所
θ
处 位
1.4.1 工业机器人的分类
置
————
r
工业机器人的结构形式
x
【
课
直角坐标系
堂
认
知 】
柱面坐标系
球面坐标系
多关节坐标系
柱面坐标机器人 主要由旋转基座、垂直移动和水平移
动轴构成,具有一个回转和两个平移自由度,其动作空 间呈圆柱形。
机器人码垛
22/28
1.4 工业机器人的分类及应用
所
处 位
1.4.2 工业机器人的应用
置 ————
按作业任务将工业机器人分为搬运、码垛、焊接、涂装、装配机器人 。
【
机器人焊接最早应用
课 堂
在装配生产线上。开
认 知
拓了一种柔性自动化
】
生产方式,实现了在
一条焊接机器人生产
线上同时自动生产若
干种焊件 。
( 2 )按基本动作机构,工业机器人通常可分为( )。
①直角坐标机器人;②柱面坐标机器人;③球面坐标机器人;④关节型机器人
A. ①② B. ①②③ C. ①③ D. ①②③④
( 3 )机器人行业所说的四巨头指的是( )。
① PANASONIC ;② FANUC ;③ KUKA ;④ OTC ;⑤ YASKAWA ;⑥ FANUC ; ⑦ NACHI ;⑧ ABB
一、传感型机器人 又称外部受控机器人。机器人的本体上没有智能单元只有执行机构和感
应机构,它具有利用传感信息(包括视觉、听觉、触觉、接近觉、力觉和红 外、超声及激光等)进行传感信息处理、实现控制与操作的能力。受控于外 部计算机,在外部计算机上具有智能处理单元,处理由受控机器人采集的各 种信息以及机器人本身的各种姿态和轨迹等信息,然后发出控制指令指挥机 器人的动作。目前机器人世界杯的小型组比赛使用的机器人就属于这样的类 型。
喷涂机器人手腕分类

喷涂机器人手腕分类
在机器人手臂和手爪之间用于支撑和调整手爪的部件就叫机器人手腕。
机器人手腕主要用来确定被抓物体的姿态,一般采用三自由度多关节机构由旋转关节和摆动关节组成,三个关节可形成27种配置。
按照机器人手腕(4、5、6轴)结构形式的不同,喷涂机器人可分为正交球型手腕喷涂机器人、直线形非球型中空手腕喷涂机器人、斜交非球型中空手腕喷涂机器人。
一、正交球型手腕喷涂机器人
正交球型手腕结构喷涂机器人除了具备防爆功能外,其手腕结构与通用六轴关节型工业机器人相同,4、5、6轴为正交球型结构,即一个摆动轴、2个旋转轴,三个轴线相交于一点且两相邻关节的轴线垂直的喷涂机器人。
二、直线形非球型中空手腕喷涂机器人
直线形非球型中空手腕结构喷涂机器人4、5、6轴为三个回转轴,且三个回转轴可重合为一条直线。
三、斜交非球型中空手腕喷涂机器人
斜交非球型中空手腕结构喷涂机器人4、5、6轴为三个回转轴,且三个回转轴相交于两点的形式。
工业机器人的组成ppt课件
部运动。
腰部:立柱,是 支撑手臂的部件,
其作用是带动臂 7
二、机械部分 2. 驱动—传动装置
工业机器人的驱动系统包括驱动器和传动 机构两部分,它们通常与执行机构连成机 器人驱本动体系统。
驱动器 传动机构
8
二、机械部分
2. 驱动—传动装置 工业机器人
驱动器通常有:
➢ 电机驱动:直流伺服电机、 步进电机、交流伺服电机。
传动机构常用的有:谐波减速器、滚珠丝 杆、链、带以及各种齿轮系。
传动机构 谐波传动 螺旋传动 链传动 带传动 齿轮传动
12
二、机械部分 2. 驱动—传动装置
- 由谐波发生器(椭圆形凸轮 及薄壁轴承)、柔轮(在柔 性材料上切制齿形)以及与 它们啮合的钢轮构成的传动 机构
13
三、控制部分 1. 人机交互系统
驱动器
➢ 液压驱动; ➢ 气动驱动。
各种电、液、气装置
9
驱动器
直动 气缸
气动
气动 马达
气爪
液压
液压 液压 马达 缸
直流 伺服 电动 机
电动
交流 伺服 电动 机
步进 电动 机
电液 气综 合驱 动
10
直流伺服电机与驱动放大器
交流伺服电机
驱动放大器
直流无刷电机
步进电机
直驱电机
11
二、机械部分 2. 驱动—传动装置
18
四、传感部分 2. 机器人-环境交互系统
机器人-环境交互系统实现工业机器人与 外部环境中的设备相互联系和协调的系统。
工业机器人与外部设备集成为一个功能单元, 如加工制造单元、多台机器人、多台机床或 设备、多个零件存储装置等集成为一个去执 行 复杂任务的功能单元。