基于AVR单片机的直流电机控制系统设计
基于单片机的直流电机控制系统的设计

基于单片机的直流电机控制系统的设计摘要:随着现代工业自动化技术的不断发展,直流电机控制系统在现代工业生产中得到广泛应用。
为了提高直流电机的运行效率和控制精度,本文通过对单片机的控制技术的研究和应用,设计出了一种基于单片机的直流电机控制系统。
本文首先介绍了直流电机的结构和原理,然后分析了直流电机控制系统的特点和要求,接着通过对单片机控制技术的研究和应用,设计出了一种可靠、高效、稳定的直流电机控制系统。
最后,本文通过实验验证了该系统的性能和可行性。
关键词:单片机,直流电机,控制系统,效率,精度,稳定性第一章绪论1.1 研究背景随着现代工业的不断发展,直流电机控制系统在现代工业生产中得到广泛应用。
任何一种电机都需要控制系统进行控制,以达到所要求的各种工作要求。
传统的直流电机控制系统大多采用的是模拟控制系统,这种控制系统存在精度低、稳定性差等问题,以及难以满足现代工业对控制精度和控制效率的要求。
而基于单片机的直流电机控制系统可以充分利用单片机优异的计算能力和可靠性,实现更加高效、精确和稳定的控制。
1.2 研究目的和意义本文旨在通过对单片机的控制技术的研究和应用,设计出一种可靠、高效、稳定的直流电机控制系统,以提高直流电机的运行效率和控制精度,为现代工业的自动化生产提供更加完善、可靠的控制系统。
同时,对单片机控制技术的研究和应用也具有重要的理论研究价值和实际应用价值。
第二章直流电机结构和原理2.1 直流电机结构直流电机由电机本体、电枢、电枢转子、永磁体、永磁体转子、凸极和定极等组成。
其中,电枢是直流电机的主要部件之一,也是直流电机控制系统的关键部件。
2.2 直流电机原理直流电机原理是利用直流电产生的磁场与电枢磁场相互作用产生转力。
当电机通电时,电枢内电流方向发生变化,电枢磁场产生的磁场与永磁体磁场产生互作用力,使电机转子转动。
第三章直流电机控制系统的特点和要求3.1 直流电机控制系统的特点直流电机控制系统的特点是响应速度快、控制精度高、运行稳定等优点。
基于单片机的直流电机控制系统的设计
基于单片机的直流电机控制系统的设计近年来,直流电机控制系统在各种自动化设备中得到广泛应用。
本文将介绍一个基于单片机的直流电机控制系统设计。
首先,我们需要选择适当的硬件平台。
在本设计中,我们选择了一块常用的单片机开发板作为控制主板。
该开发板具有丰富的输入输出接口、高性能处理器和易于编程的特点,非常适合用于控制系统的设计。
此外,我们还需要一个直流电机和相关的电路驱动电路。
在硬件连接方面,我们将直流电机连接到开发板的输出引脚,并使用电路驱动电路将开发板的输出信号转换为适当的电压和电流以驱动电机。
电路驱动电路通常包括电流检测电路、功率放大电路和反馈电路,以确保电机的稳定运转。
在软件设计方面,我们需要编写控制程序,以实现对直流电机的速度、方向和位置的控制。
通过编程,我们可以使用PWM调节电机的转速。
同时,我们还可以使用PID控制算法来根据反馈信号调节电机的位置。
为了实现这些功能,我们需要学习单片机的编程语言,如汇编语言或高级语言(如C语言)。
设计一个完整的直流电机控制系统还需要考虑一些其他因素。
例如,我们可以添加传感器以监测电机的转速和位置,以提供反馈信号给控制系统。
这样,我们可以根据实际情况进行动态控制,提高系统的稳定性和精度。
此外,我们还可以添加一些保护电路,如过载保护和温度保护,以确保电机在运行时不会损坏。
总结一下,一个基于单片机的直流电机控制系统的设计涉及硬件和软件两个方面。
在硬件方面,我们需要选择合适的开发板和电路驱动电路,并将它们连接起来。
在软件方面,我们需要编写控制程序,并学习相关的编程语言和算法。
通过综合考虑各种因素,并进行系统优化和改进,我们可以设计出一个功能强大、稳定可靠的直流电机控制系统。
基于AVR单片机的直流无刷电机智能控制系统设计
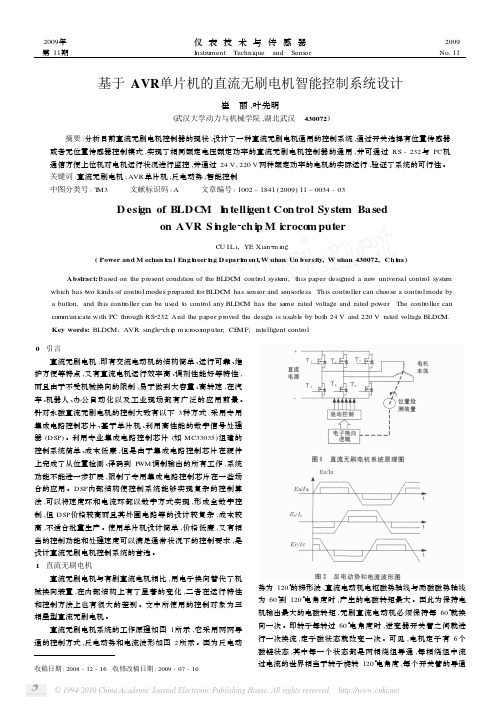
2009年 第11期仪表技术与传感器I nstru ment Technique and Sens or 2009 No 111 收稿日期:2008-12-16 收修改稿日期:2009-07-10基于AVR 单片机的直流无刷电机智能控制系统设计崔 丽,叶先明(武汉大学动力与机械学院,湖北武汉 430072) 摘要:分析目前直流无刷电机控制器的现状,设计了一种直流无刷电机通用的控制系统,通过开关选择有位置传感器或者无位置传感器控制模式,实现了相同额定电压额定功率的直流无刷电机控制器的通用,并可通过RS -232与PC 机通信方便上位机对电机运行状况进行监控,并通过24V,220V 两种额定功率的电机的实际运行,验证了系统的可行性。
关键词:直流无刷电机;AVR 单片机;反电动势;智能控制中图分类号:T M3 文献标识码:A 文章编号:1002-1841(2009)11-0034-03D esi gn of BLDCM I n telli gen t Con trol System Ba sedon AVR S i n gle 2ch i p M i croco m puterC U IL i,YE Xian 2m ing(Power and M echan i ca l Eng i n eer i n g D epart m en t,W uhan Un i versity,W uhan 430072,Ch i n a)Abstract:Based on the p resent conditi on of the BLDC M contr ol syste m,this paper designed a ne w universal contr ol syste m which has t w o kinds of contr ol modes p repared for BLDC M has sens or and sens orless .This contr oller can choose a contr ol mode by a butt on,and this contr oller can be used t o contr ol any BLDC M has the sa me rated voltage and rated power .The contr oller can communicate with PC thr ough RS 2232.And the paper p r oved the design is usable by both 24V and 220V rated voltage BLDC M.Key words:BLDC M;AVR single 2chi p m icr ocomputer;CE MF;intelligent contr ol 0 引言直流无刷电机,即有交流电动机的结构简单、运行可靠、维护方便等特点,又有直流电机运行效率高、调剂性能好等特性,而且由于不受机械换向的限制,易于做到大容量、高转速,在汽车、机器人、办公自动化以及工业现场都有广泛的应用前景。
AVR直流电机控制系统硬件设计
AVR直流电机控制系统硬件设计近年来,电机调速系统在工业自动化、生产过程操纵、测控外表等领域的应用越来越深入和广泛。
ATmega16是基于增强的A VR RISC结构的低功耗8位CMOS微操纵器。
由于其先进的指令集以及单时钟周期指令执行时刻,ATmega16 的数据吞吐率高达1 MIPS/MHz,从而能够减缓系统在功耗和处理速度之间的矛盾。
要紧由ATmega16为核心设计由LMD18200驱动芯片,采纳232通讯协议的串行通信操纵电路构成的直流电机PWM调速操纵系统。
系统要紧完成由上位机和ATmega16操纵直流电机的起动,停止和加减速等功能。
文章详细介绍了本调速操纵系统的工作原理、PWM驱动接口电路和K1010光电耦合器,LMD18200驱动电路,串行通信操纵电路相应的软件设计。
软件通过ICCA VR编写,然后用A VRStudio进行仿真并将编译通过的程序代码下载到ATmega16之中对系统进行操纵。
关键词:ATmega16;直流电机;PWM;LMD18200AbstractIn recent years, the SCM application which used in the field of industrial automation, production process becomes more and more deepen and extensive.ATmega16 is a microcontroller buildup on A VR RISC configuration which is a low consume microcontroller of 8-bit CMOS.The data of ATmega16 have a high dispatcher which can reach 1MIPS/MHz for advanced instruction volum and the instruction of single clock cycle,so it can relaxed the conflict between consume and dispose speed.This design show us that a PWM speed system of DC-motor using ATmega16 is introduced in this paper. This paper elaborates on the system principle,optical Encoder, LMD18200 driving system, High Reliability Photo CouplerK1010,the DC-motor PWM digital control system,and system serial communication agreement of 232 communication. The system is mainly completed the start, stop and acceleration and decelerationn functions by which the master PC and ATmega16 control the DC motor. The article described in detail the speed control system's working principle, the PWM drive interface circuit and K1010 Optocoupler,LMD18200 drive circuit, the relative software design of the serial communication control circuit.The software is programmed through ICCA VR, then simulated by A VRStudio and the compiled code is downloaded to ATmega16 to control the system.Key words: ATmega16; DC-motor; PWM;LMD18200目录1 绪论 (1)1.1 课题的背景及意义 (1)1.2 直流电机的进展 (2)1.3 本设计完成的工作 (2)2 A VR单片机简介 (3)2.1 单片机系统概述 (3)2.2 ATmega16功能概述 (3)2.3 ATmega16单片机 (5)2.3.1 ATmega16单片机的特点及特性 (5)2.3.2 ATmega16单片机引脚配置及说明 (8)2.3.3 CPU (9)2.3.4 储备器 (10)2.3.5I/O口介绍 (12)2.3.6 复位电路 (17)2.3.7 时钟电路 (18)3 直流电机操纵系统硬件设计 (21)3.1 总体电路设计 (21)3.2 时钟电路 (21)3.3 系统复位电路 (21)3.4 串行通信接口电路设计 (22)3.4.1 要紧特点 (22)3.4.2 内部结构 (23)3.4.3 Max232引脚图 (23)3.4.4 Max232 电路设计 (23)3.5 驱动电路 (24)3.5.1 LMD18200芯片介绍 (24)3.5.2 各引脚的功能及原理 (26)3.5.3 驱动电路设计 (27)3.6 光电耦合电路 (28)4 软件设计 (30)4.1 初始化程序设计 (30)4.1.1 I/O初始化 (30)4.1.2 定时器初始化 (30)4.1.3 串口初始化 (31)4.2 主程序 (32)4.3 中断及转速操纵子程序 (34)4.4 串行数据传输程序 (36)4.5 ICCA VR (37)4.5.1 开发环境ICCA VR介绍 (37)4.5.2 开发及编译 (37)4.6 A VRStudio仿真 (38)4.6.1 仿真器的特点 (38)4.6.2 连接JTAG ICE (39)4.6.3 仿真环境 (40)4.7 ATmega16单片机操纵直流电机程序代码 (42)结论 (49)致谢 (50)参考文献 (51)附录A 英文原文 (52)附录B 中文翻译 (60)附录C 总体电路设计图 (67)1 绪论1.1 课题的背景及意义在电气时代的今天,电动机一直在现代化的生产和生活中起着十分重要的作用。
基于AVR单片机的无刷直流电动机控制系统设计
压级增加 6~10 dB时 ,响度才有加倍感觉 。
世界能源及环境危机的加剧使得节能环保成为目前全 球的主题 。吸尘器行业要求高效而且低噪也日益迫切 ,吸尘 器既要实现低噪声 ,且又要达到高效率 ,其存在着某种矛盾 : 要达到低噪声 ,势必以损失能效为代价 ,把声能尽可能转化
表 1 吸尘器测试结果比较
这里先做吸尘器测试对比试验 ,根据 IEC60704 - 1《家用
表 2 飞利浦吸尘器电机性能参数
电器及类似电器用具的噪声测试方法 》,测得结果如表 1 所 示。
电压 功率 效率 声压值 类别
/V /W / ( % ) (A 计 ) / dB
尺寸 /mm
转速 寿命 / ( r·m in - 1 ) / h
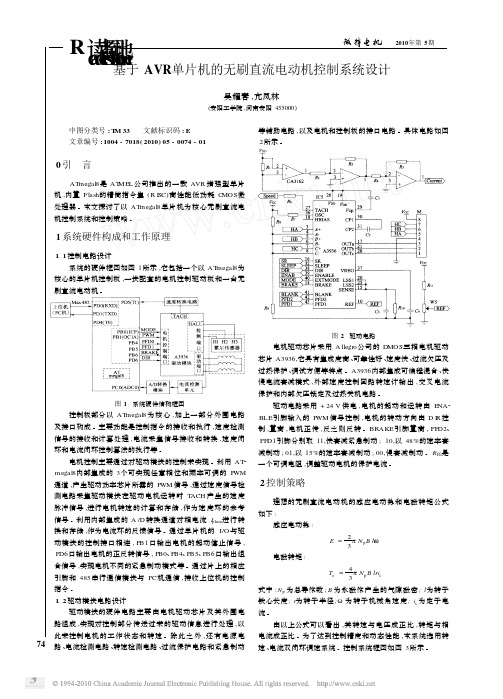
等辅助电路 ,以及电机和控制板的接口电路 。具体电路如图 2所示 。
0 引 言
ATmegal8是 ATM EL公司推出的一款 AVR 增强型单片 机 ,内置 Flash的精简指令集 ( R ISC)高性能低功耗 CMOS微 处理器 。本文探讨了以 ATmegal8单片机为核心无刷直流电 机控制系统和控制策略 。
2 控制策略
理想的无刷直流电动机的感应电动势和电磁转矩公式
如下 : 感应电动势 :
电磁转矩 :
E
=
2 3
πN
p
B
lωr
Te
=
4 3
πN
p
B
Hale Waihona Puke lris式中 : Np 为总导体数 ; B 为永磁体产生的气隙磁密 ; l为转子 铁心长度 ; r为转子半径 ;ω为转子机械角速度 ; is 为定子电 流。
由以上公式可以看出 ,其转速与电压成正比 ,转矩与相 电流成正比 。为了达到控制精度和动态性能 ,本系统选用转 速 、电流双闭环调速系统 。控制系统框图如图 3所示 。
基于单片机的直流电机控制系统设计分析
基于单片机的直流电机控制系统设计分析直流电机是一种常用的电动机类型,它具有启动力矩大、转速可调、结构简单、体积小、价格便宜等特点,被广泛应用于各种自动化设备中。
1.系统结构设计:包括电机、传感器、驱动电路和控制器等组成部分。
电机是被控对象,通过传感器实时获取电机的运行状态,并传输给控制器进行处理。
驱动电路将控制器输出的控制信号转化为电机驱动信号,控制电机的转速和方向。
2.控制算法设计:单片机控制系统通过控制算法实现对电机的精确控制。
常见的控制算法有PID控制算法、模糊控制算法等。
PID控制算法根据电机的实际运行状态和期望状态之间的偏差来调整电机的驱动信号,使其达到期望的转速和方向。
模糊控制算法基于模糊逻辑系统,将模糊集合理论应用于电机控制中,具有更好的适应性和鲁棒性。
3.传感器选择与接口设计:直流电机控制系统需要通过传感器实时获取电机的运行状态,常见的传感器包括编码器、霍尔传感器和位置传感器等。
编码器可以精确测量电机的转速和位置,霍尔传感器可以检测电机的转向,位置传感器可以测量电机的位置。
传感器的选择需要考虑系统的要求和成本因素。
接口设计需要将传感器与控制器进行连接,通过合适的接口协议传输传感器数据。
4.驱动电路设计:驱动电路将来自控制器的控制信号转化为电机驱动信号。
常见的驱动电路有H桥电路和MOSFET电路等。
H桥电路采用四个开关管组成,可以实现正反转和速度调控。
MOSFET电路采用金属氧化物半导体场效应管,具有响应速度快、效率高和体积小等优点。
5.硬件设计与软件开发:硬件设计包括电路原理图绘制、PCB设计和电路组装等。
软件开发包括单片机程序设计和人机界面设计等。
单片机程序设计通过编程语言实现控制算法和接口协议,将控制信号发送给驱动电路。
人机界面设计可以通过LCD显示屏、按键和LED灯等外设实现,提供用户与系统的交互界面。
综上所述,基于单片机的直流电机控制系统设计分析需要考虑系统结构、控制算法、传感器选择与接口设计、驱动电路设计、硬件设计和软件开发等方面,以实现对直流电机的精确控制。
基于AVR单片机的无刷直流电机控制系统设计
程 序 运 算 调 用 。 由于A mea1L A t g 6 的 D 转 换 器 转 换 速 度 比较 高 ,采 取 中 值 滤
务 :中 断 程 序 主 要 对 中 断 事 件 进 行 检 波 法 来 减 少 随 机 干 扰 、 误 检 或 者 传 感 器 不 稳 定 而 引 起 的 失 真 ,以 得 到 较 为 测并 通知主程 序进行相 应处理 、完成
软件整体 设计
系统 软件包括 主程序及 中断服务
程 序 两 部 分 。主 程 序 主 要 由 系 统 初 始 电 流 调 节 器 、 电机 运 行 保 护 等 有 关 子
N
化 、 转 子 转 速 计 算 及 转 速 PD闭 环 控 I 制 组 成 ,主 程 序 完 成 大 部 分 的 功 能 任
电流调节器的设计
电流 的调 节 过 程 程 快 得 多 ,因 此 在 电 流 调 节 器 快 速
调 节 过 程 中 , 可 以 认 为 反 电动 势 E 基
将 用户设定速 度之转 化为对 用的 电压
Up wm
本不变 。这样在设计 电流环 时 , 以 可
最 佳 系 统 ” 原 理 。按 二 阶 最 佳 系 统
效 正 , 在 一 股 情 况 下 ,希 望 超 调 量
%s % ,查 表 得 阻 尼 比 = . 7 s 时 O7 , 0 K :05 ,由此 可 得 : .
时 捕 捉 中 断 使  ̄ I E = ,输 入 捕 捉 Cl I 1
_ ●
一 4 ・ l 6 量子痤品.尿 2 ].1、、 Ⅳe p c r.n _ | 0 1 ^^ .e w.onc 1 ,、 ,
责任编辑 :王莹
I usr o t o nd t y C n r l
一种基于AVR单片机的无刷直流电机控制器的设计与实现
1 . 1霍 尔位置信
比, 减少 MOS F E T的导通时 间, 降低母 线电流 。
初始化 I / O端 口、设置控制 寄存 器和初始化 各 种功能模块 等。
2控制策略及软件设计 2 . 1控制策略 器探测转子旋转磁场 的位置 。微 处理器通过采
J—O
其 中:u ( k ) 为第 k次采样 时刻 的控 制系统
系统 具有 良好 的 动 态响应 和稳 态
特性。
输 出值; e ( 为 第 k 次采样时刻输 入的偏差值; e ( k 。 1 ) 为第 ( k 一 1 ) 次采样 时 刻输 入 的偏 差 值 ;I ( I 为积 分系 数,KI = KP T / T I ;KD为微 分
系数 ,KD= KP T D/ T。
母 线 电流过 流保 护功 能是 控制 器硬件 电 路 设计 考虑的重点内容,关系到控制器 的运行 【 关键 词 】无刷 直流电机 A V R P I D控制
数字 P I D控 制算 法分 为位 置 式 P I D 算法
和 增 量式 P I D算 法 。 由于位 置式 P t D算 法 , 要计 算 u ( k ) ,不仅需要本次 的偏差信号 e ( k ) 和 e ( k 一 1 ) ,而 且 还 要 在 积 分 项 把 历 次偏 差 信 号 e ( j ) 进行相加。这样,不仅计算繁琐 ,而且 为保存 e ( i ) 还要 占用 很 多内存 。因此在基 于单片机控
一
能力,提高车辆的运行效率 。母线 电流过流保
I D 护电路首先需要解决 的是母线 回路 中电流 的高 制的直流无刷 电机系统 中,多采用增 量式 P 精度 采集 问题 。本 设计采 用霍 尔 互感 器进 行 算法来进行转速控制 。
基于AVR单片机的无刷直流电机控制器设计
无刷直流电机控制器设计-软件部分摘要本设计采用ATmega128实现对无刷直流电机的控制,其中速度和转矩控制环境部分都采用闭环控制。
整个系统主要由电流检测电路、转速和位置检测电路、功率驱动电路、过电流保护电路构成。
该设计不仅要实现正、反向旋转时电机的正常调速,而且要在特殊情况下实现对电机的急停操作。
无刷直流电机因为具有直流有刷电机的特性,同时驱动器也是频率变化的装置,所以又名直流变频,无刷直流电机的运转效率,低速转矩,转速精度等都比任何控制技术的变频器还要好,由于无刷直流电动机是以自控式运行的,所以不会象变频调速下重载启动的同步电机那样在转子上另加启动绕组,也不会在负载突变时产生振荡和失步。
多年来业界对异步电动机变频调速的研究,归根到底是在寻找控制异步电动机转矩的方法,稀土永磁无刷直流电动机必将以其脉宽调速﹑小体积﹑高效率和稳态转速误差小等特点在调速领域显现优势。
可以解决产业界节点与高性能驱动的需求。
关键词:无刷直流电机;控制器;脉宽调制Design of Brushless DC Motor Controller-Software PartAbstractThis design adopts the ATmega128 to achieve control of the brushless dc motor. The speed and torque control part adopts closed-loop control. The whole system is mainly composed of current detecting circuit, speed and position detection circuit, power driving circuit and over current protection circuit. The design is not only to achieve positive and reverse rotation of the motor at normal speed, but also under special circumstances. It could be done to stop the operation of motor. Because of brushless dc motor is dc motor of the characteristics, drive and frequency variation device at the same time. As known as direct current frequency conversion, brushless dc motor operation is efficiency, low speed torque, rotational speed precision and so on. The brushless dc motor based on automatic control type to perform, so not like frequency control of motor speed synchronous motor overload start under plus startup winding on the rotor, also won't generate oscillation and step out when load mutation. For years the industry on the research of the asynchronous motor frequency control of motor speed, in the final analysis is looking for a way to control the asynchronous motor torque. Brushless dc motor is bound to its wide speed range, small volume, high efficiency, steady speed and small error characteristics appeared in the field of speed advantages. It can meet the requirements of industry nodes with high performance drive.Key Words: brushless dc motor;controller; pulse width modulation目录摘要 (I)Abstract ............................................... I I 目录................................................ I II 1 绪论 (1)1.1课题研究背景 (1)1.2课题研究现状 (1)1.2.1无刷直流电机的发展 (1)1.2.2国内外研究进展与现状 (1)1.3课题来源 (2)1.4研究的应用价值 (2)1.4.1课题的设计思想 (3)1.4.2课题研究的内容 (3)1.4.3研究论文的章节安排 (3)2 无刷直流电机控制器的工作原理与总体设计 (4)2.1无刷直流电机的工作原理 (4)2.2无刷直流电机的工作方式的选择 (5)2.2.1无刷直流电机在三三导通方式下的工作原理 (5)2.2.2无刷直流电机在两两导通方式下的工作 (10)2.3无刷直流电机控制器原理 (16)2.4无刷直流电机软件设计 (16)3 无刷直流电机控制器的硬件设计 (18)3.1微控制器模块的设计 (18)3.2键盘和显示电路 (20)4 无刷直流电机控制器的软件设计 (21)4.1软件编程方法 (21)4.2无刷直流电机控制器的整体软件结构 (22)4.3无刷直流电机控制器主层模块的软件设计 (23)4.3.1初始化模块 (23)4.3.2管理模块 (23)4.3.3维护更新模块 (25)5 总结 (38)5工作总结 (38)结束语 (39)毕业设计(论文)知识产权声明 (42)毕业设计(论文)独创性声明 (43)附录A 程序 (44)附录B 外文翻译 (54)1 绪论1 绪论1.1课题研究背景无刷直流电动机作为一种常见的执行机构在工业系统中被广泛应用。
基于单片机的直流电机控制系统设计
基于单片机的直流电机控制系统设计一、引言随着科技的飞速发展,单片机技术在电机控制领域中应用越来越广泛。
相对于传统的电机控制方式,基于单片机的控制方式具有更灵活、可靠、智能化的优点,受到了广大工程师的喜爱。
二、设计目标本文旨在通过单片机控制直流电机转速、转向和停止,实现直流电机控制系统的设计。
系统具有以下特点:1. 可实现电机的正反转控制。
2. 可实现电机的速度控制。
3. 可实现电机的停止和自锁控制。
4. 可以方便地调节电机的参数。
三、系统硬件设计1. 控制芯片:选用强大的单片机 51单片机,具有高精度、高效率、可靠性等优点。
2. 电路板:采用双面铜板设计,电路板上布置了各种模块、开关和LED指示灯。
3. 电机:采用常规的直流电机,具有高效率、低噪音、低能耗等优点。
4. 电源:整个系统采用稳压电源,能够确保系统的安全稳定运行。
四、系统软件设计1. 控制程序实现:(1)引入相关头文件,初始化程序;(2)设置电机接口,包括正反转端口、PWM信号输出端口、停止端口;(3)实现电机转向、速度和停止控制;(4)设计系统的异常处理程序(如电路短路或电机过载等)。
2. 操作界面设计:(1)利用LCD屏幕和按键实现操作界面,方便参数调节和参数显示。
(2)操作界面包括电机状态指示、电机转向、电机速度等等。
(3)在操作界面中设置按键操作,可以更加方便地对直流电机进行控制。
五、系统测试与调整1. 测试:使用示波器、电压表等工具对整个系统进行测试,测试系统的正反转控制、速度调节、停止控制等功能是否正常。
2. 调整:重点调整电机PWM频率,以及电机启动、加速、减速和停止的时间,使系统更加稳定、可靠、符合实际要求。
六、结论本文基于单片机技术,设计了一套直流电机控制系统。
该系统具有可靠性高、控制灵活、操作方便的优点,在各种工业领域具有广泛的应用前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
芯 片 的新 方 案 。应 用 该 方 案 设 计 的 动 力 平 台 系 统 具 有 轻 量 化 、 高 效低耗 、 实 时性好等 优点 , 可 广 泛 应 用 于 工 农 业 生 产、 民用 生 活 、 教 育 科 研 等领 域 。
关键词 : A VR 单 片 机 ; 直 流电机 ; 驱 动 控 制
Ab s t r a c t : M U C— c on t r o l l e d mo t or dr i v e pl a t f or m ha s be e n d e ma nd e d wi de l y i n e n gi ne e r i ng f i e l d, S O t he a ut ho r de s i g ne d a n e w s c h e me wi t h A V R s i ng l e c h i p mi c r o c om p ut e r a s m a i n c o nt r ol c hi p. By us i n g t hi s s c he m e, t h e mot o r dr i v e pl a t f or m h as s om e a d va nt a g e s, s uc h as l i ght we i g ht ,e f f i c i e nt ,l o w c on s um pt i o n,go od r e a l — t i me p e r f o r ma nc e,w hi c h c a n b e wi de l y us e d i n i ndu s — t r i a l a n d a gr i c ul t u r a l pr od uc t i on, c i v i l l i f e, e duc at i o n, s c i e nt i f i c r e s e ar c h an d o t he r f i e l ds . Ke y wo r d s:A V R s i ngl e - c hi p c om p ut e r;Dc mo t or ; dr i ve c on t r o l
J I ANG Yi ng - t a o
( S u z h o u I n s t i t u t e o f I n d u s t r i a l Te c h n o l o g y ,S u z h o u,J i a n g s u 2 1 5 1 0 4 , Ch i n a )
基 于 AVR 单 片 机 的 直 流 电机 控 制 系统 设 计
姜 颖 韬
( 苏州工业职业技术学 院 , 江苏 苏州 2 1 5 1 0 4 ) Nhomakorabea摘
要: 针 对 在 工 程 领 域 内具 有 广 泛 需 求 的 MUC控 制 电动 机 驱 动 的 动 力 平 台 , 开发 了一 种 以 A VR单 片 机作 为 主 控
模 块
图 1 双 侧 电机 差 速 驱 动 控 制模 块 结 构 示 意 图
表 1 常 用 电机 特 性 说 明表
电机 类 型 优 点 缺 点
步 进 电机 启 动 或转 向切 换 迅 速 带 负载 能 力 弱 , 耗 能 高
能 获 得 较 广 的 线 性 调 速 范 围 直 流 电机 带 负 载 能 力 强 控 制 精 度 稍 差
第1 2 卷第4 期
2 01 3年 1 2月
杨 凌
职 业
技 术
学
院 学 报
Vo 1 . 1 2 NO . 4
De e., 201 3
J o u r n a l o f Ya n g l i n g Vo c a t i o n a l& Te c h n i c a l Co l l e g e
度。
核 心
主 控
种稳 定可 靠 的动力 平 台 , 广 泛应用 于 工业 生产 、 民
用生活、 教 育 科研 、 军 事 打 击 等 诸 多 领 域 。选 用 AVR单 片机 替代 传统 的 5 1系 列单 片机 作为 这一 动 力 平 台的 主控芯 片 , 有助 于实 现平 台 的智能化 、 小 型 化, 降低 功耗 , 提 升 系统运 行 的实 时效率 。
中图 分 类 号 : TM3 3 文献标识码 : A 文章编号 : 1 6 7 1 — 9 1 3 1 ( 2 0 1 3 ) 0 4 — 0 0 2 5 — 0 3
Dc Mo t o r Co nt r o l S y s t e m Ba s e d o n AVR S i ng l e — c hi p Co m pu t e r De s i g n
1 电机 驱 动 控 制 方 案
电机驱 动控 制模 块是 推动 车辆 行进 的直 接执 行 者 。车 辆前 行过 程 中 , 根 据 前 方 路 面状 况 需 要 不 断 的加速 或减 速 , 更 为关 键 的是 在循迹 过程 中 , 车体 需
要 随着 赛道 的 曲折做 出正 确 的转 向 。 图 1 所 示 为 双 侧 电 机 差 速 驱 动 控 制 模 块 结 构 示 意 图 。 这 种 驱 动 方 式 类 似 履 带 式 装 甲 车 辆 的 控 制 方
基 于 MC U 控 制 电 动机 驱 动 的 自行 小 车 , 作 为
一
当左侧 电机 转速 低 于 右侧 电机 转 速 时 , 左 右 两侧 驱 动轮 的转速 差小 于 0 , 车 辆左 转 弯行 进 ; 通 过 对两 侧 驱 动轮 转速 差 的控 制输 出 , 即可 调 节 车 体 的转 向角