《操作臂的力控制》PPT课件
合集下载
杠杆力臂作图ppt课件
·
︱ ︱ ︱ ︱ ︱
——————————
L
L1
——
L2
—————
L
L2
———————
L
画力臂的步骤:
1、找到支点。
2、用虚线延长力的作用线。
3、做支点到力的作用线的垂线。
4、标注出力臂L。
课堂练习
————————
︱ ︱ ︱ ︱ ︱
︱ ︱ ︱ ︱ ︱
———————
—
F1
·
—————————
省力
﹥
省力费距离
钢丝钳、开瓶器、指甲刀、起子
费力
﹤
费力省距离
钓鱼杆、理发剪、火钳、筷子
等臂
=
不省力也不省距离
天平
二、力臂的作图
O
F1
F2
F2
F1
O
·
·
︱ ︱ ︱ ︱ ︱ ︱
︱ ︱ ︱ ︱ ︱ ︱
————————
—————————————
︱ ︱ ︱ ︱ ︱ ︱
L1
L2
不规则杠杆作图
·
↓
教学过程:
(一)、知识回顾:
1.杠杆的五要素是:____,_____,_____,____,_____.
2.杠杆的平衡条件是: ———————————————
杠杆在动力或阻力作用下处于静止或匀速转动,叫杠杆平衡。
(二)杠杆的分类及特点:
______杠杆,是动力臂________阻力臂的杠杆,它的特点是____________ 如: 2. ______杠杆,是动力臂________阻力臂的杠杆,它的特点是____________ 如: 3 ______杠杆,是动力臂_________阻力臂的杠杆,它的特点是_____________ 如:
︱ ︱ ︱ ︱ ︱
——————————
L
L1
——
L2
—————
L
L2
———————
L
画力臂的步骤:
1、找到支点。
2、用虚线延长力的作用线。
3、做支点到力的作用线的垂线。
4、标注出力臂L。
课堂练习
————————
︱ ︱ ︱ ︱ ︱
︱ ︱ ︱ ︱ ︱
———————
—
F1
·
—————————
省力
﹥
省力费距离
钢丝钳、开瓶器、指甲刀、起子
费力
﹤
费力省距离
钓鱼杆、理发剪、火钳、筷子
等臂
=
不省力也不省距离
天平
二、力臂的作图
O
F1
F2
F2
F1
O
·
·
︱ ︱ ︱ ︱ ︱ ︱
︱ ︱ ︱ ︱ ︱ ︱
————————
—————————————
︱ ︱ ︱ ︱ ︱ ︱
L1
L2
不规则杠杆作图
·
↓
教学过程:
(一)、知识回顾:
1.杠杆的五要素是:____,_____,_____,____,_____.
2.杠杆的平衡条件是: ———————————————
杠杆在动力或阻力作用下处于静止或匀速转动,叫杠杆平衡。
(二)杠杆的分类及特点:
______杠杆,是动力臂________阻力臂的杠杆,它的特点是____________ 如: 2. ______杠杆,是动力臂________阻力臂的杠杆,它的特点是____________ 如: 3 ______杠杆,是动力臂_________阻力臂的杠杆,它的特点是_____________ 如:
第五章 机器人的控制基础PPT课件
3. 力(力矩)控制方式 在完成装配、抓放物体等工作时,除要
准确定位之外,还要求使用适度的力或力 矩进行工作,这时就要利用力(力矩)伺 服方式。
4. 智能控制方式 详见第六章。
三、机器人控制的基本单元
机器人控制系统的基本要素包括电动机、 减速器、运动特性检测的传感器、驱动电 路、控制系统的硬件和软件。
1-电枢绕组;2-电枢铁心;3-机座;4-主磁极铁心; 5-励磁绕组;6-换向极绕组;7-换向极铁心;8-主磁极
极靴;9-机座底脚; 直流电机横剖面示意图
2.直流电机的额定值
(1)额定功率:是指轴上输出的机械功率,单 位为kW。
(2)额定电压:安全工作的最大外加电压或输 出电压,单位为V(伏)。
•快速响应好 直流伺服电机:传统型和低惯量型两种类型。
传统型按定子磁极的种类分为两种,永磁式和 电磁式。永磁式的磁极是永久磁铁;电磁式的磁 极是电磁铁,磁极外面套着励磁绕组。
低惯量分为盘形电枢直流伺服电机、 空心杯电枢永磁式直流伺服电机及无槽电 枢直流伺服电机。
1一定子;2一转子 图5-3 盘型直流电机结构
• 1一转子(导线绕6空心杯1);2一内定子; 3一外定子;4一磁极;5一气隙;6—导 线;7一内定子中的磁路
• 图5-4 杯型直流电机结构
在电枢控制方式下,直流伺服电机的主 要静态特性是机械特性和调节特性。
1.机械特性 直流伺服电机的机械特性公式,
n
Ua
CT
R
CeCT 2
n0
RT
CeCT 2
2. 交流伺服电机的转子有三种结构型式:
(1)高电阻率导条的鼠笼转子
国内生产的SL系列的交流伺服电机就 是采用这种结构。
(2)非磁性空心杯转子
《机器人手臂》课件

KUKA机器人手臂是一款广泛应用于工业领域的 机器人手臂,具有高精度、高速度和高稳定性的 特点。
结论
KUKA机器人手臂具有较高的性能和稳定性,但 在某些方面仍有改进空间。可通过优化算法和控 制技术来提高其性能和稳定性,进一步降低能耗 和提高安全性。
05
机器人手臂的未来展望
未来发展方向
智能化
随着人工智能技术的进步,机器 人手臂将具备更高的自主决策和 学习能力,能够适应更复杂的工
轨迹规划
根据任务需求,规划手臂的运 动轨迹,确保精确到达目标位
置。
控制系统实现
通过控制系统实现对机器人手 臂的精确控制,包括位置、速 度和加速度等参数的控制。
驱动系统
电动机驱动
采用电动机作为驱动器,通过 传动装置驱动连杆运动。
液压驱动
利用液压系统产生驱动力,驱 动连杆运动。
气压驱动
利用气压产生驱动力,驱动连 杆运动。
动作。
关节
连杆之间通过关节连接 ,实现手臂的弯曲和旋
转。
传感器
用于检测手臂的位置、 速度和力等参数,实现
精确控制。
执行器
驱动手臂运动的装置, 通常采用电机或液压系
统。
工作原理
01
02
03
04
基于运动学原理
机器人手臂的运动遵循运动学 原理,通过控制关节角度和连
杆长度来实现所需动作。
坐标系建立
为了描述手臂的位置和姿态, 需要建立相应的坐标系。
安全与隐私
机器人手臂在应用过程中可能涉及安全和隐私保护问题。需要制定相应的法规和规范,确 保机器人手臂的使用合法、安全可控。
道德与伦理
在设计和使用机器人手臂时,需要考虑道德和伦理问题,避免对人类造成伤害或产生不公 平的后果。应建立相应的伦理审查机制,确保机器人手臂的发展和应用符合社会价值观和 道德规范。
结论
KUKA机器人手臂具有较高的性能和稳定性,但 在某些方面仍有改进空间。可通过优化算法和控 制技术来提高其性能和稳定性,进一步降低能耗 和提高安全性。
05
机器人手臂的未来展望
未来发展方向
智能化
随着人工智能技术的进步,机器 人手臂将具备更高的自主决策和 学习能力,能够适应更复杂的工
轨迹规划
根据任务需求,规划手臂的运 动轨迹,确保精确到达目标位
置。
控制系统实现
通过控制系统实现对机器人手 臂的精确控制,包括位置、速 度和加速度等参数的控制。
驱动系统
电动机驱动
采用电动机作为驱动器,通过 传动装置驱动连杆运动。
液压驱动
利用液压系统产生驱动力,驱 动连杆运动。
气压驱动
利用气压产生驱动力,驱动连 杆运动。
动作。
关节
连杆之间通过关节连接 ,实现手臂的弯曲和旋
转。
传感器
用于检测手臂的位置、 速度和力等参数,实现
精确控制。
执行器
驱动手臂运动的装置, 通常采用电机或液压系
统。
工作原理
01
02
03
04
基于运动学原理
机器人手臂的运动遵循运动学 原理,通过控制关节角度和连
杆长度来实现所需动作。
坐标系建立
为了描述手臂的位置和姿态, 需要建立相应的坐标系。
安全与隐私
机器人手臂在应用过程中可能涉及安全和隐私保护问题。需要制定相应的法规和规范,确 保机器人手臂的使用合法、安全可控。
道德与伦理
在设计和使用机器人手臂时,需要考虑道德和伦理问题,避免对人类造成伤害或产生不公 平的后果。应建立相应的伦理审查机制,确保机器人手臂的发展和应用符合社会价值观和 道德规范。
机器人学导论,第三章第四章

0 l3 0 l4 1 0 0 1
0 1 1 0 3 HT 0 0 0 0
0 0 1 0
0 0 0 1
四、写出运动方程(求出
0 H
0 H
T
)
T T T T T
0 1 1 2 2 3 3 H
0 1 0 0 1 0 0 0
中间连杆 分两种情况: 首、末连杆
3.4、连杆参数和连杆坐标系(续)
首、末连杆
与基座0固接的坐标系为 {0};
基座固定不动 {0}作为机器人操作的绝对 坐标系。 原则上坐标系 {0}可以任意规定(不受连 杆参数、关节变量影响 )。
为方便起见,对 {0}规定如下: 当第一个关节变量为零 时, {0}、 {1}重合({0}为{1}的原位状态)。
3.4、连杆参数和连杆坐标系(续)
三、连杆坐标系
连杆的描述 连杆连接的描述 连杆之间位姿的描述
采用方法: 在每个连杆固接一个坐 标系,用坐标系之间的 描述表示。 例如:
与基座固接的坐标系为 {0}; 与连杆1固接的坐标系为 {1}; 与连杆i固接的坐标系为 {i};
下一步讨论:坐标系 {i}的原点、轴的方向的确 定方法。
因此,有:
i 1 i
相对于动 坐标系而 言,遵循 “从左到 右”的原 则。
T RX ( i 1 ) DX ( ai 1 ) RZ ( i ) DZ ( di )
3.5 连杆变换和运动学方程(续) i 1 iT RX ( i 1 ) DX ( ai 1 ) RZ ( i ) DZ ( di )
求
0 H
T
一、建立D-H坐标系
Z3
Z2 X3 Z1 X2
力臂作图题ppt课件
6
例7:如图1,王师傅想用最省力的方法把一个铁 桶推上台阶,请在图1中画出这个力的示意图
7
作图题:作出力臂 例1:如图甲所示的钢丝钳,其中A是剪钢丝处,B为 手的用力点,O为转动轴(支点),图乙为单侧钳柄 及相连部分示意阁.请在图乙中画出钢丝钳剪钢丝 时的动力臂和阻力F2
8
例2:请画出图中拉力F对支点O的力臂L1,阻力 臂L2
3ห้องสมุดไป่ตู้
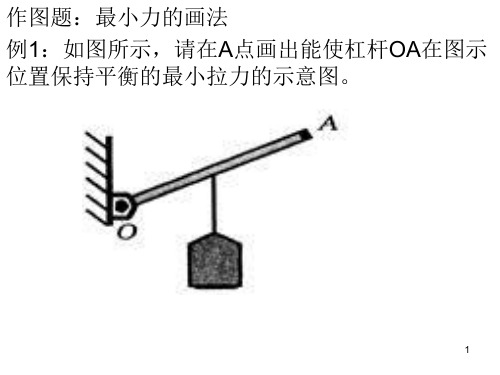
例4:O是杠杆BOA的支点,A点所挂物体的重力 为G,请在图中画出要使杠杆在水平位置平衡时的 最小的力
4
例5:如图所示,使用羊角锤拔钉子,动力作用在 锤柄上A点。请作出拔钉子时所用最小动力F的示 意图和它的动力臂l1。
5
例6:图1是使用道钉撬的示意图,请在图中画出 最省力的力的示意图,并作出相应的力臂
9
例3:某剧组为拍摄需要,设计了如图所示的装置 来改变照明灯的高度.轻质杠杆ABO可绕O点转动, 在图中画出ABO所受阻力F2的示意图,并画出动 力臂L1和阻力臂L2
10
例4:如图所示,是一台简易吊车的示意图,请画 出支点O和F1、F2的力臂L1、L2
11
例5:如下图中ABO可看成杠杆,O为支点,请在 图中画出该杠杆的动力臂和所受阻力的示意图.
作图题:最小力的画法 例1:如图所示,请在A点画出能使杠杆OA在图示 位置保持平衡的最小拉力的示意图。
1
例2:在杠杆上的A点挂一重物,在C点对杠杆施 加一个最小的力,使杠杆平衡在图中所示的位置. 试画出这个力的示意图和力臂.
2
例3:在图中,O为支点,画出使杠杆保持平衡的 最小力F(保留作图痕迹)
12
例6:完成下列作图(6分) (1)如图甲所示,作 出:①水桶M所受重力的示意图;②以O为支点, 力F的力臂L
例7:如图1,王师傅想用最省力的方法把一个铁 桶推上台阶,请在图1中画出这个力的示意图
7
作图题:作出力臂 例1:如图甲所示的钢丝钳,其中A是剪钢丝处,B为 手的用力点,O为转动轴(支点),图乙为单侧钳柄 及相连部分示意阁.请在图乙中画出钢丝钳剪钢丝 时的动力臂和阻力F2
8
例2:请画出图中拉力F对支点O的力臂L1,阻力 臂L2
3ห้องสมุดไป่ตู้
例4:O是杠杆BOA的支点,A点所挂物体的重力 为G,请在图中画出要使杠杆在水平位置平衡时的 最小的力
4
例5:如图所示,使用羊角锤拔钉子,动力作用在 锤柄上A点。请作出拔钉子时所用最小动力F的示 意图和它的动力臂l1。
5
例6:图1是使用道钉撬的示意图,请在图中画出 最省力的力的示意图,并作出相应的力臂
9
例3:某剧组为拍摄需要,设计了如图所示的装置 来改变照明灯的高度.轻质杠杆ABO可绕O点转动, 在图中画出ABO所受阻力F2的示意图,并画出动 力臂L1和阻力臂L2
10
例4:如图所示,是一台简易吊车的示意图,请画 出支点O和F1、F2的力臂L1、L2
11
例5:如下图中ABO可看成杠杆,O为支点,请在 图中画出该杠杆的动力臂和所受阻力的示意图.
作图题:最小力的画法 例1:如图所示,请在A点画出能使杠杆OA在图示 位置保持平衡的最小拉力的示意图。
1
例2:在杠杆上的A点挂一重物,在C点对杠杆施 加一个最小的力,使杠杆平衡在图中所示的位置. 试画出这个力的示意图和力臂.
2
例3:在图中,O为支点,画出使杠杆保持平衡的 最小力F(保留作图痕迹)
12
例6:完成下列作图(6分) (1)如图甲所示,作 出:①水桶M所受重力的示意图;②以O为支点, 力F的力臂L
自动间隙调整臂的使用ppt课件

10
8
C、 用合适扳手顺时针方向转动(转动时可听见“哒哒” 声) 调整 臂的六角头直至摩擦衬片与制动鼓接触,然后再逆时 针方向转 动(转动时会听到“咔咔”声)六角头1圈(见图 5)。注意: 不能使用电动扳手。 图5
9
5、 施加若干次制动,制动(刹车)间 隙将自动调整至正常范围,调整 功能可通过六角头在制动即将结束 时顺时针方向的自动 旋转观察到。 至此安装过程结束。
7
安装步骤 A、 用合适的扳手顺时针旋转调整臂端
部六角头——此时可听见 “哒哒”声(注意:不能使用电动 扳手),使调整臂销孔与销 孔对正,然后 在圆柱销上涂上黄油,轻轻插入叉孔,锁 上开口销。(见图5) B、 用调整垫片和卡簧将调整臂固定在花键端, 检查调整臂回位是 否灵活,然后按控制臂 上的箭头方向推动控制臂直到推不动为止 (标记对齐),锁紧安装支架(见图5)。上 述操作目的是保证摩擦衬片与制动鼓间的设 定间隙。
5
2. 在凸轮轴花键端部涂上黄油,然后将调整臂 的定位支架用螺栓安装于汽车底盘上,注意 这时螺栓不拧紧,使定位支架可以在螺栓上。
(见下图)
6
3、 把调整臂套在花键端(花键端需要涂上黄油), 调整臂销孔与调整拨叉销孔有一段位移量;将控 制 臂安装在定位支架上,调整壳体上的箭头方向 应与制动方向一致,也就使制动分泵推杆向外推 动调整 臂的E为弹性变形区,Ce磨损区, C为正常间隙。间隙式制动间隙自动调整臂 能精确记录由于摩擦衬片磨损及自身的弹性 变形量而引起的间隙增加量,并且精确地将 间隙调整至正常范围。 本
3
自动间隙调整臂有如下优点: 1.自动保持制动蹄片和制动鼓之间的间隙
恒定,因而使制动安全可靠。 2.制动分泵推杆行程短,使制动迅速可靠。 3.减少压缩空气的损耗,延长了空压机、
8
C、 用合适扳手顺时针方向转动(转动时可听见“哒哒” 声) 调整 臂的六角头直至摩擦衬片与制动鼓接触,然后再逆时 针方向转 动(转动时会听到“咔咔”声)六角头1圈(见图 5)。注意: 不能使用电动扳手。 图5
9
5、 施加若干次制动,制动(刹车)间 隙将自动调整至正常范围,调整 功能可通过六角头在制动即将结束 时顺时针方向的自动 旋转观察到。 至此安装过程结束。
7
安装步骤 A、 用合适的扳手顺时针旋转调整臂端
部六角头——此时可听见 “哒哒”声(注意:不能使用电动 扳手),使调整臂销孔与销 孔对正,然后 在圆柱销上涂上黄油,轻轻插入叉孔,锁 上开口销。(见图5) B、 用调整垫片和卡簧将调整臂固定在花键端, 检查调整臂回位是 否灵活,然后按控制臂 上的箭头方向推动控制臂直到推不动为止 (标记对齐),锁紧安装支架(见图5)。上 述操作目的是保证摩擦衬片与制动鼓间的设 定间隙。
5
2. 在凸轮轴花键端部涂上黄油,然后将调整臂 的定位支架用螺栓安装于汽车底盘上,注意 这时螺栓不拧紧,使定位支架可以在螺栓上。
(见下图)
6
3、 把调整臂套在花键端(花键端需要涂上黄油), 调整臂销孔与调整拨叉销孔有一段位移量;将控 制 臂安装在定位支架上,调整壳体上的箭头方向 应与制动方向一致,也就使制动分泵推杆向外推 动调整 臂的E为弹性变形区,Ce磨损区, C为正常间隙。间隙式制动间隙自动调整臂 能精确记录由于摩擦衬片磨损及自身的弹性 变形量而引起的间隙增加量,并且精确地将 间隙调整至正常范围。 本
3
自动间隙调整臂有如下优点: 1.自动保持制动蹄片和制动鼓之间的间隙
恒定,因而使制动安全可靠。 2.制动分泵推杆行程短,使制动迅速可靠。 3.减少压缩空气的损耗,延长了空压机、
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
First attach the constraint frame to the peg.
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
In Fig.(a), the peg is in free space, so the natural constrains are:
CF 0
that transitions in the natural constraints can be tracked. – With each such change in natural constraints, a new set of
artied from the set of assembly strategies and enforced by the control system.
0
0
Cv
vapproach
0
0
0
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
In Fig.(b), the peg has reached the surface. To detect that this has
Velocities alone these two directions can be assigned
arbitrarily, and may be controlled with position cantrol
mode. We select:
vz V 0 , z 0
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
vz V 0
z 0
Static
fz 0
z 0
fx fy 0
x y 0
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
Example: 摇手柄.
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
Example: 拧螺丝.
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
每一个操作任务可以分解为多个子任务,这些子任务都是 由操作臂末端执行器和工作环境之间特定的接触状态定义的。 对于每一个与这种子任务相关的约束,称为自然约束。
自然约束:位置约束、力约束
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
Example: 用扳手夹着笔从孔中拔出来. 我们假设: – 笔可以垂直出入孔,而且忽略摩擦力. – 整个工作过程是准静态的,忽略所有惯性力.
第11章: 操作臂的力控制 概述
1. 位置控制的局限性 当末端执行器与操作臂工作环境发生碰撞时,纯粹的位置
控制已经不适用。. 考虑用海绵擦玻璃. 用刚性刮削工具从玻璃表面刮油漆.
第11章: 操作臂的力控制 概述
如果末端执行器、工具或者环境刚性很高,则操作臂压贴在平面上的 操作执行起来就非常困难.
4. 装配策略 Assembly strategy is a term that refers to a sequence of planned
artificial constraints that will cause the task to proceed in a desirable manner. – The system can detect a change in the contacting situation so
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
Example: An assembly sequence used to put a round peg into a round hole. For each of the subtasks shown, give the natural and artificial constraints. Also, indicate how the system senses the change in the natural constraints as the operation proceeds.
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
考虑和运动相关的约束 自然约束: • 由于几何的约束关系,螺丝不能在x和y的方向移动:
vx vy 0
• 也不能绕着x 和 y 轴转动:
人工约束:
x y 0
• The remaining directions are linear and angular z axes.
考虑静态约束 自然约束: – 由于做了准静态的假设,即忽略所有惯性力,所以笔在运
动方向上不能有任何的加速度和力:
人工约束:
fz 0 , z 0
– 由于孔在几何上有约束,所以我们必须保证有如下的力输
入:
fx fy 0 , x y 0
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
Therefore, the artificial constrains in this case constitute an entire
position trajectory, which moves the peg in the CZˆ direction toward
the surface.
第11章: 操作臂的力控制 概述
2. 工业机器人在装配作业中的应用 简单的应用场合 流水线作业
目前,操作臂的灵巧性仍然较低,限制在自动化装配领域 中的应用.
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
假设仅需要描述接触和自由状态,只考虑由于接触产生的 力,主要是刚度较大的物体之间的接触力。
– 自然约束和人工约束的坐标轴都是互相正交的. – 自然约束中的运动学部分与人工约束的静态部分坐标相同. – 自然约束中的静态部分与人工约束的运动学部分坐标相同.
Natural constrains
Artificial constrains
Kinematic
vx vy 0 x y 0
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
In Fig.(a), the peg is in free space, so the natural constrains are:
CF 0
that transitions in the natural constraints can be tracked. – With each such change in natural constraints, a new set of
artied from the set of assembly strategies and enforced by the control system.
0
0
Cv
vapproach
0
0
0
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
In Fig.(b), the peg has reached the surface. To detect that this has
Velocities alone these two directions can be assigned
arbitrarily, and may be controlled with position cantrol
mode. We select:
vz V 0 , z 0
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
vz V 0
z 0
Static
fz 0
z 0
fx fy 0
x y 0
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
Example: 摇手柄.
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
Example: 拧螺丝.
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
每一个操作任务可以分解为多个子任务,这些子任务都是 由操作臂末端执行器和工作环境之间特定的接触状态定义的。 对于每一个与这种子任务相关的约束,称为自然约束。
自然约束:位置约束、力约束
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
Example: 用扳手夹着笔从孔中拔出来. 我们假设: – 笔可以垂直出入孔,而且忽略摩擦力. – 整个工作过程是准静态的,忽略所有惯性力.
第11章: 操作臂的力控制 概述
1. 位置控制的局限性 当末端执行器与操作臂工作环境发生碰撞时,纯粹的位置
控制已经不适用。. 考虑用海绵擦玻璃. 用刚性刮削工具从玻璃表面刮油漆.
第11章: 操作臂的力控制 概述
如果末端执行器、工具或者环境刚性很高,则操作臂压贴在平面上的 操作执行起来就非常困难.
4. 装配策略 Assembly strategy is a term that refers to a sequence of planned
artificial constraints that will cause the task to proceed in a desirable manner. – The system can detect a change in the contacting situation so
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
Example: An assembly sequence used to put a round peg into a round hole. For each of the subtasks shown, give the natural and artificial constraints. Also, indicate how the system senses the change in the natural constraints as the operation proceeds.
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
考虑和运动相关的约束 自然约束: • 由于几何的约束关系,螺丝不能在x和y的方向移动:
vx vy 0
• 也不能绕着x 和 y 轴转动:
人工约束:
x y 0
• The remaining directions are linear and angular z axes.
考虑静态约束 自然约束: – 由于做了准静态的假设,即忽略所有惯性力,所以笔在运
动方向上不能有任何的加速度和力:
人工约束:
fz 0 , z 0
– 由于孔在几何上有约束,所以我们必须保证有如下的力输
入:
fx fy 0 , x y 0
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
Therefore, the artificial constrains in this case constitute an entire
position trajectory, which moves the peg in the CZˆ direction toward
the surface.
第11章: 操作臂的力控制 概述
2. 工业机器人在装配作业中的应用 简单的应用场合 流水线作业
目前,操作臂的灵巧性仍然较低,限制在自动化装配领域 中的应用.
第11章: 操作臂的力控制 §11.1 局部约束任务中的控制坐标系
假设仅需要描述接触和自由状态,只考虑由于接触产生的 力,主要是刚度较大的物体之间的接触力。
– 自然约束和人工约束的坐标轴都是互相正交的. – 自然约束中的运动学部分与人工约束的静态部分坐标相同. – 自然约束中的静态部分与人工约束的运动学部分坐标相同.
Natural constrains
Artificial constrains
Kinematic
vx vy 0 x y 0