基于支持向量机的缺陷红枣机器视觉识别
公路路面缺陷识别算法

公路路面缺陷识别算法一、引言随着交通运输行业的快速发展,公路路面的维护和管理变得尤为重要。
路面缺陷的及时识别和修复,对于保障交通安全、延长路面使用寿命具有重要意义。
传统的路面缺陷识别方法主要依赖于人工巡检,不仅效率低下,而且难以覆盖全部路况。
近年来,随着机器视觉和人工智能技术的进步,自动化的路面缺陷识别算法成为研究的热点。
本文旨在设计并实现一种高效的公路路面缺陷识别算法,以提高路面缺陷识别的准确率和效率。
二、相关工作在路面缺陷识别领域,已有许多研究工作。
传统的图像处理技术如边缘检测、阈值分割等被广泛应用于路面缺陷的检测。
随着深度学习技术的发展,卷积神经网络(CNN)等模型在路面缺陷识别方面取得了显著成果。
例如,有研究使用CNN对路面图像进行分类,以识别不同类型的缺陷。
此外,还有一些研究工作探讨了如何结合传统图像处理技术和深度学习技术以提高缺陷识别的准确性。
三、方法论本文提出的公路路面缺陷识别算法主要包括以下几个步骤:1.图像预处理:首先对路面图像进行预处理,包括降噪、对比度增强、色彩空间的转换等操作,以提高图像质量,便于后续的缺陷识别。
2.特征提取:利用深度学习的卷积神经网络(CNN)对预处理后的路面图像进行特征提取。
通过训练深度学习模型,提取出能够反映路面缺陷的特征。
3.缺陷分类:基于提取的特征,采用分类器对路面缺陷进行分类。
本文采用支持向量机(SVM)作为分类器,对不同类型的缺陷进行分类。
4.后处理与结果展示:对分类器的输出结果进行后处理,包括阈值设置、区域标注等操作,最终展示出识别的路面缺陷类型和位置。
四、实验设置为了验证本文提出的算法的有效性,我们在某高速公路路段进行了实地采集路面图像数据集。
数据集包含了不同类型、不同程度的路面缺陷,如裂缝、坑洞、车辙等。
实验中,我们将使用70%的数据作为训练集,30%的数据作为测试集。
训练过程中,我们采用随机梯度下降(SGD)优化算法对模型参数进行更新,并使用交叉验证技术来评估模型的性能。
基于机器视觉的钢丝绳表面缺陷检测

基于机器视觉的钢丝绳表面缺陷检测机器视觉技术的应用在各个领域都得到了广泛的认可和应用。
在工业领域中,钢丝绳的表面缺陷检测一直是一个重要而困难的问题。
传统的人工检测方法不仅费时费力,而且准确性也存在一定的问题。
基于机器视觉的钢丝绳表面缺陷检测技术的出现,为解决这一问题提供了新的思路和方法。
一、机器视觉在钢丝绳表面缺陷检测中的优势相比传统的人工检测方法,机器视觉技术具有以下几个显著优势:1. 高效性:机器视觉系统能够高速地处理图像信息,具备较强的计算和处理能力,能够实时地对钢丝绳表面进行检测,大大提高了工作效率。
2. 准确性:机器视觉系统能够精确地捕捉和分析图像中的细节和特征,对钢丝绳表面缺陷进行准确的检测和分类,避免了人为因素对检测结果的影响。
3. 自动化:机器视觉系统能够自动地完成图像采集、处理和分析等一系列操作,无需人工干预,提高了工作效率和减少了人力成本。
二、基于机器视觉的钢丝绳表面缺陷检测方法1. 图像采集:使用高分辨率的工业相机对钢丝绳表面进行图像采集。
采集时需注意光照条件、背景干扰等因素对图像质量的影响。
可采用多角度、多方位的方式进行图像采集,以获取更全面的表面信息。
2. 图像预处理:采集到的图像可能存在噪声、模糊等问题,需要进行预处理以提高后续处理的准确性和稳定性。
常用的图像预处理方法包括去噪、图像增强、边缘检测等。
3. 特征提取:通过对图像进行特征提取,提取钢丝绳表面的纹理、颜色、形状等特征信息。
常用的特征提取方法包括灰度共生矩阵、小波变换、形态学处理等。
4. 缺陷检测:通过对提取的特征进行分析和处理,检测出钢丝绳表面的缺陷。
可以采用传统的机器学习算法,如支持向量机、随机森林等,也可以借助深度学习算法,如卷积神经网络、循环神经网络等进行缺陷检测。
5. 结果评估:对检测结果进行评估和分析,判断钢丝绳表面的缺陷类型和严重程度。
可以采用准确率、召回率、F1值等指标进行评估,根据评估结果进行进一步的优化和改进。
基于支持向量机的农作物缺素症状诊断方法

基于支持向量机的农作物缺素症状诊断方法摘要:针对如何利用农作物叶面颜色特征判断其营养症状的实际问题,应用数字图像处理技术和最小二乘支持向量机,提出一种基于支持向量机的农作物缺素症状诊断方法。
首先运用数字图像处理技术计算农作物叶面颜色特征;然后将归一化颜色空间特征输入最小二乘支持向量机,相应缺素症状作为输出,通过遗传算法确定最优组合参数,进而建立了农作物缺素症状诊断方法。
通过大豆缺素症状实际资料的仿真诊断结果表明,该方法速度快且精度高,具有良好的适应性和实用性。
标签:农作物缺素;诊断方法;颜色特征;支持向量机引言农作物叶片表面不同的颜色特征及规律,可反映其不同的营养状况,对于农业生产的高效益且可持续发展非常重要[1]。
20世纪90年代,国内外学者已经开始使用图像处理技术应用到农作物营养信息监测方面的研究[2],将数字图像的多维特征与智能信息处理技术有机结合[3-5],为农作物缺素症状诊断提供了理论基础。
文章以大豆叶面的彩色图像为研究对象,应用数字图像处理技术计算大豆缺素症状发生时叶面的颜色特征向量,然后将归一化颜色空间特征向量输入最小二乘支持向量机,并运用遗传算法确定最优组合参数,建立大豆叶面颜色特征与相应缺素症状非线性映射关系,从而提出一种基于支持向量机的农作物缺素症状诊断方法。
为自然条件下利用智能移动终端解决农作物营养症状及施肥提供技术支持,发挥信息智能处理技术优势为农业生产服务。
1 农作物叶面颜色特征本研究在适合的自然条件下,利用彩色数码相机采集不同缺素症状的大豆植株的单叶图像,如图1所示。
大豆叶面数字图像的颜色信息作为其营养诊断及生长发育的指标,依据文献[6]选择机器视觉处理设备的RGB色彩系统和人眼视觉规律相似的HSI模型相结合,提取出大豆生长过程中单叶面图像颜色空间的归一化特征向量,如表1所示。
表1 颜色特征参数2 基于支持向量机的缺素症状诊断方法研究中将大豆叶面图像的颜色特征作为最小二乘支持向量机的输入向量,通过其高维特征空间实现大豆缺素症状的诊断。
基于机器视觉的苹果园果实识别研究综述

基于机器视觉的苹果园果实识别研究综述近年来,随着计算机视觉技术的快速发展,基于机器视觉的果实识别研究也成为了一个热门的研究领域。
苹果园果实识别是其中一个重要的应用场景之一。
本文将对基于机器视觉的苹果园果实识别研究进行综述。
苹果园果实识别的目标是利用机器视觉技术自动化地检测和识别苹果园中的果实,以提高果实的采摘和产量管理效率。
这一研究领域主要涉及图像处理、模式识别和机器学习等方向。
目前,苹果园果实识别主要分为两个阶段:果实检测和果实分类。
果实检测是指在苹果园图像中准确地定位和标记出果实的位置,而果实分类则是将检测出的果实按不同的类别进行分类。
在果实检测方面,一般采用基于颜色和形状特征的方法。
颜色特征是苹果园图像中果实与背景的主要差异性之一,可以通过颜色分布模型和颜色特征描述子进行检测。
形状特征则是通过提取果实边缘信息或者利用几何形状描述子进行检测。
还有一些基于纹理特征和深度学习的方法也得到了一定的应用。
在果实分类方面,主要采用机器学习和深度学习方法。
机器学习方法一般采用传统的特征提取和分类器训练方法。
特征提取一般包括颜色、形状、纹理等特征,分类器可以是支持向量机、最近邻等。
深度学习方法则是通过神经网络自动提取和学习特征,并使用卷积神经网络进行分类。
深度学习方法在苹果园果实识别中取得了很好的效果,但其训练需要大量的标注数据和计算资源。
除了上述方法,还有一些其他的研究在苹果园果实识别中得到了一定的应用。
有些研究将多传感器技术与机器视觉相结合,使用多谱段图像和近红外图像进行果实检测和分类。
有些研究将激光扫描技术应用于果实检测和参数测量。
还有些研究将无人机和机器视觉技术相结合,实现了对大面积果园的果实检测和分类。
基于机器视觉的苹果园果实识别研究在近年来取得了显著的进展。
但是由于果实的颜色、形状和大小等特征的差异性较大,苹果园果实识别仍然面临一些挑战。
未来的研究可以继续探索新的特征提取方法和分类算法,提高苹果园果实识别的准确性和效率。
基于机器视觉的自动检测系统设计
基于机器视觉的自动检测系统设计近年来,随着人工智能和机器学习技术的快速发展,基于机器视觉的自动检测系统在各个领域得到了广泛应用。
无论是在工业生产中的缺陷检测、医疗诊断中的病变检测,还是在交通安全中的违规行为监控,机器视觉系统已经成为一种非常重要的技术手段。
本文将从系统的设计、关键技术和应用案例等方面,探讨基于机器视觉的自动检测系统。
一、系统设计基于机器视觉的自动检测系统设计主要包括硬件设备、图像采集、图像处理和决策判断等几个方面。
1. 硬件设备硬件设备是机器视觉系统的基础,其中包括摄像头、传感器、光源等。
摄像头负责图像的采集,选择合适的摄像头可以提高图像质量和系统的稳定性。
传感器负责采集其他环境信息,如温度、湿度等。
光源则提供适当的照明条件,确保图像清晰度和准确性。
2. 图像采集图像采集是机器视觉系统的第一步,也是最关键的一步。
图像采集可以通过单张图像或者连续图像进行,也可以通过不同角度和视角对目标进行多角度采集。
采集到的图像需要具备一定的分辨率和色彩准确度。
3. 图像处理在图像采集之后,需要对采集到的图像进行处理,以提取目标的有效信息。
图像处理包括图像分割、特征提取、滤波处理等。
图像分割用于将目标从背景中分离出来,特征提取则用于提取目标的特征,如形状、颜色、纹理等。
滤波处理则是对图像进行去噪和增强。
4. 决策判断在图像处理完成之后,需要进行决策判断,以确定目标是否符合预定的标准。
决策判断通常使用分类、识别和检测等技术。
分类用于将目标划分到不同的类别,识别则是对目标进行识别,检测则是寻找目标的位置。
二、关键技术在基于机器视觉的自动检测系统中,有几个关键技术是不可或缺的。
1. 图像处理技术图像处理技术可以说是机器视觉系统的核心技术之一。
它包括图像增强、图像分割、特征提取、目标识别和目标检测等。
这些技术的优化和改进可以大大提升系统的性能和准确性。
2. 特征提取技术特征提取技术主要用于将目标从图像中提取出来,并对其进行描述。
【江苏省自然科学基金】_缺陷识别_期刊发文热词逐年推荐_20140817

推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
科研热词 木材缺陷 颜色矩 视觉跟踪 聚类方法 相似度度量 模糊隶属度 模板匹配 检测器生成算法 支持向量机 局部二值模式(lbp) 否定选择算法 匹配算法 分类算法 信息安全 人工免疫算法 k-means bhattacharyya系数
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2014年 序号 1 2 3
2014年 科研热词 混杂rfid 无线传感 冗余过滤 推荐指数 1 1 1
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4源自5 6 7 8 9 10 11科研热词 推荐指数 聚类分析 1 结构上下文 1 灰度共生矩阵 1 木材缺陷 1 形状上下文 1 局部描述符 1 尺度不变特征变换 1 分层的平衡迭代归约及聚类 1 关键点 1 k-means 1 affinity propagation聚类 1
2008年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
科研热词 随机子空间 配置机制 远程接入 识别 线性判别分析 红枣 稳定图 特征抽取 模块化2dpca 机器视觉 支持向量机 客户相关 参数识别 动力特性 人脸验证 vpn网络 ipsec协议 ikev2协议 cslda
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13
2011年 科研热词 软件可信性 识别框架 粒子滤波 目标跟踪 特征选择 特征脸 失信链 失信因子 失信 多特征融合 人脸识别 不确定性度量 pca 推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1
风电机组叶片维护装备的缺陷检测与识别方法

风电机组叶片维护装备的缺陷检测与识别方法随着风力发电行业的迅猛发展,风电机组的叶片维护工作变得愈发重要。
叶片是风电机组的核心部件之一,其性能和可靠性直接关系到发电效率和安全运行。
因此,准确检测和识别叶片的缺陷对风电行业具有举足轻重的意义。
本文将从机器视觉和智能算法的角度,介绍风电机组叶片维护装备的缺陷检测与识别方法,以提高检测效率和准确性,并降低维护成本。
一、机器视觉技术在叶片缺陷检测中的应用机器视觉技术是一种通过图像处理和分析来获取和理解数字图像的方法。
在风电机组叶片缺陷检测中,机器视觉技术起到了非常重要的作用。
其主要步骤包括图像获取、图像预处理、特征提取和缺陷识别等。
1. 图像获取:风电机组叶片通常很高,为了获取叶片表面的图像,可以采用无人机、遥感卫星等方式进行高空拍摄。
同时,还可以配备高清相机进行近距离拍摄,以获取更加清晰的叶片表面图像。
2. 图像预处理:叶片表面存在光照不均、噪声干扰等问题,因此需要进行图像预处理,以提高后续处理的准确性。
常用的预处理方法包括灰度化、滤波、增强等。
3. 特征提取:通过对图像进行特征提取,可以获得叶片表面的相关信息,如纹理、颜色、形状等。
常用的特征提取方法包括纹理特征(如灰度共生矩阵、小波变换)、颜色特征(如颜色直方图、颜色矩)和形状特征(如边缘检测、轮廓识别)等。
4. 缺陷识别:在得到叶片表面的特征信息后,可以利用各种分类器进行缺陷识别。
常用的分类器包括支持向量机、决策树、随机森林等。
通过训练样本的分类信息,可以根据提取到的特征对叶片缺陷进行准确的识别。
二、智能算法在叶片缺陷检测中的应用除了机器视觉技术,智能算法在叶片缺陷检测中也有着广泛应用。
智能算法主要包括人工神经网络、遗传算法、模糊逻辑等。
1. 人工神经网络:人工神经网络是一种模拟人脑神经系统的计算模型。
在叶片缺陷检测中,可以利用人工神经网络来建立缺陷模型,通过对输入特征进行训练,实现对叶片缺陷的自动识别。
基于机器视觉的自动检测系统设计与实现研究

基于机器视觉的自动检测系统设计与实现研究一、研究背景随着制造业和质量控制领域的不断发展,对于自动化检测和质量控制的需求也越来越高。
在传统的质量控制方法中,需要人工进行检测和判断,不仅效率低下,而且还存在较大的误差。
而基于机器视觉的自动检测系统可以利用计算机进行图像分析和处理,实现对物体的自动检测和识别,大大提高了检测效率和准确性。
二、机器视觉技术的原理和应用机器视觉技术是一种利用计算机对图像进行分析、处理和识别的技术。
其原理是通过摄像头等设备获取目标物体的图像或视频,并对其进行数字信号转换和处理,提取出物体的特征、形状、大小等信息,最后通过算法进行识别和分类。
机器视觉技术的应用非常广泛,如物体检测、轮廓识别、色彩分析、表面缺陷检测等。
在制造业领域,机器视觉技术也被广泛应用于自动化检测和质量控制中。
三、自动检测系统设计的流程和关键技术自动检测系统的设计流程包括图像采集、图像预处理、特征提取和识别分类四个主要步骤。
其中,图像采集是获取待检测物体的图像或视频;图像预处理是对采集到的图像进行去噪、灰度化、二值化等操作,使其更适合进行特征提取;特征提取是基于采集到的图像提取出物体的特征信息;识别分类是将物体进行分类。
在自动检测系统的设计和实现中,需要掌握一些关键技术。
首先是图像的采集和处理技术,包括摄像头的选型与部署、图像传输和存储等。
其次是图像处理算法的研究和应用,如二值化、轮廓提取、形状匹配等。
接下来是特征分类算法的研究和应用,如神经网络、支持向量机、决策树等。
四、自动检测系统的实现和应用案例自动化检测和质量控制是机器视觉技术的重要应用之一。
一些企业和机构已经开始利用这一技术来优化生产流程和提高检测效率。
例如,某汽车零部件制造企业采用机器视觉技术对液晶板进行表面缺陷检测,检测效率提高了30%以上,同时还减少了人工误检的情况。
另外,机器视觉技术的应用还可以拓展到其他领域,如医疗卫生、安防监控、智能家居等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
决非线性识别的问题 ,而且所构造的模型具有很好 的预测性能[4~5 ] 。本文采用机器视觉技术获取红 枣的图像 ,在 HIS 颜色空间中提取 H 的均值和均方 差作为红枣的颜色特征值 ,利用支持向量机将缺陷 红枣从正常红枣中区分出来 。
1 试验材料与装置
试验材料为河北省沧州市产金丝小枣 ,其中正 常红枣 140 个 ,缺陷红枣 120 个 。
目前 ,对参数的优化尚无比较成熟的方法 ,一般 要靠多次实验确定 。通过对 260 个金丝小枣进行颜 色特征值的提取 ,建立支持向量机来利用 H 、σH 识 别正常红枣和缺陷红枣 ,在 260 个样本中取 84 个正 常枣 、72 个缺陷红枣作为训练集 ,其余样本作为预 测集检验模型的效果 。依据训练样本回判准确率 、 预测样本预测准确率确定了参数 C 和σ,试验数据 见表 1 。由表 1 可以看出 ,在参数 C = 32 、σ= 2 时 , 虽然支持向量机模型对训练集样本的分类准确率不 是最高 ,但是模型对预测集的分类准确率却是最高 , 此时模型的推广能力最强 。
图 2 红枣图像及其 G 分量直方图 Fig. 2 Image of dates and t he histogram of G value
(a) 红枣图像 (b) G 分量直方图
212 颜色空间的选取 在图像处理中 ,经常使用的颜色空间是 R GB 颜
色空间和 HIS 颜色空间 。R GB 颜色系统是在三基 色学说下建立起来的颜色系统 ,面向计算机 、摄像机
第 3 期 赵杰文 等 : 基于支持向量机的缺陷红枣机器视觉识别
115
311 建立模型 建立缺陷红枣 SVM 识别模型是本文研究的重
点 。应用 SVM 建立识别模型首先是核函数的选 择 ,不同的核函数对所建立模型的性能影响很大 。 在没有先验知识指导的情况下 ,采用径向基核函数 往往能够得到令人满意的结果[12 ] 。这是因为线性 内核只有在样本数据线性可分的情况下才能得到较 好的分类效果 ,而径向基核函数可以将非线性样本 数据映射到高维特征空间 ,因此可以处理具有非线 性关系的样本数据 ,而且当径向基核函数取特定参 数值时与线性内核相同 。而 Sigmoid 内核在实际中 很少应用 ,因此本研究中用径向基函数作为 SVM 的核函数建立识别模型 。但其性能直接受到参数大 小的影响 。误差惩罚参数 C 实现在错分样本的比 例和算法复杂度之间的折衷 ,即在确定的特征子空 间中调节学习机器置信范围和经验风险的比例以使 学习机器的推广能力最好 。它的选取一般是由具体 的问题而定 ,并取决于数据中噪声的数量 ,在确定的 特征子空间中 C 的取值小表示对经验误差的惩罚 小 ,学习机器的复杂度小而经验风险值较大 ;如果 C 取 ∞,则意味着训练样本必须要准确地分类 。径向 基核参数σ直接影响 SVM 的性能优劣 。特征子空
2008年3月
农业机械学报
第 39 卷 第 3 期
基于支持向量机的缺陷红枣机器视觉识别 3
赵杰文 刘少鹏 邹小波 石吉勇 殷小平
【摘要】 在枣的干制过程中形成的油头枣 、浆头枣 、霉烂枣是最常见的缺陷枣 ,它们整体或局部颜色偏暗 、偏
黑 ,有必要通过机器视觉技术将其识别出来 。在 HIS 颜色空间中 ,提取 H 的均值和均方差作为红枣的颜色特征
-
H) 2
(3)
式中 N ———红枣像素总数
Hi ———红枣第 i 个像素的色调值
3 缺陷红枣的识别
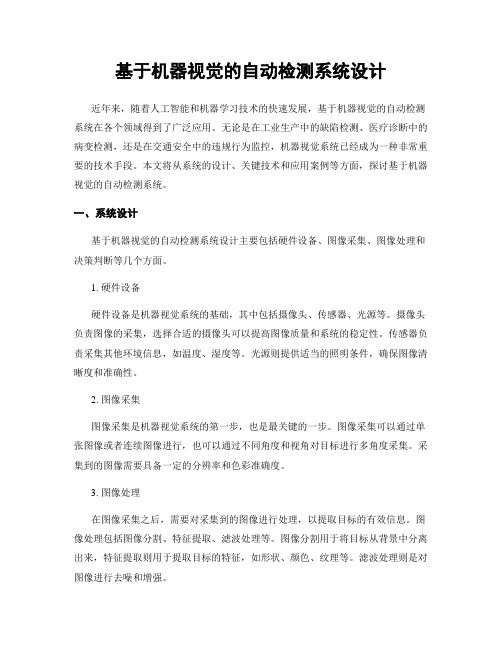
红枣色调平均值 H 与色调均方差σH 的分布如 图 3 所示 ,可以看出 ,以 H 、σH 作为特征值采用普通 的线性方法是无法识别正常红枣和缺陷红枣的 。因
此 ,用非线性模式识别方法来判断枣颜色是否为正 常 ,从而判断出枣是否为缺陷枣 。支持向量机能很 好的解决非线性识别的问题 ,所构造的模型具有很 好的预测性能[8~11 ] 。因此 ,本研究采用支持向量机 来识别缺陷红枣 。
从 R GB 到 HIS 的转换为非线性变换 ,其转换 关系为[1 ]
I = ( R + G + B) / 3
S = 1 - min( R , G , B) / I
2R- G- B W = arccos 2 ( R2 + G2 + B2 - RG - GB - RB) 1/ 2 H = W ( B ≤G) H = 2π- W ( B > G)
2 红枣颜色特征的提取
211 图像分割 拍摄到的红枣图像为彩色图像 ,图像经过分割 ,
去除背景 ,保留完整的红枣区域 ,以便进行红枣的特 征提取 。为分析红枣区域与背景区域的差别 ,作图 像的直方图 。图像的 G 分量直方图如图 2b 所示 , 从图中可以看出 G 分量直方图分为明显的 2 块区 域 ,分别对应红枣区域和背景区域 。因此 ,在 G 分 量上设置阈值即可以获得很好的分割效果 ,如图 2a 所示 。
Zhao J iewen Liu Shaopeng Zou Xiaobo Shi J iyong Yin Xiaoping
( Jiangs u U ni versity)
Abstract
During t he production and storage of Chinese dates , some of t hem are easy to mould rot because of high water content . The defect dates appear darker t han t he normal ones. Based on support vector machine , t he recognition of t he defect Chinese date machine vision was proposed. After t he acquisition of t he Chinese dates images , t he color model was changed f rom R GB to HIS. Then , t he average value H and standard square deviation value σH of dates hue values were calculate. Depending on t he two values, t here was few overlaps between defect dates and normal ones in t he plot of H and σH. Therefore , H and σH were t reated as t he feat ure parameters. Artificial neural network (ANN) and support vector machine ( SVM ) model were used to analysis t he dates feat ures respectively. The experimental result s show t hat SVM has a better performance t han ANN on distinguish defect Chinese dates f rom normal ones , and t he correct recognition rate of SVM iG 、B ———R GB 空间颜色分量
213 颜色特征值的选取
红枣的颜色是个整体的概念 ,利用红枣色调 H
的平均值 H 表示红枣的整体颜色 ,利用色调 H 的
均方差σH 表示红枣区域各像素颜色的离散程度 。
N
∑ H
=
1 N
i =1
Hi
(2)
N
σH =
∑ 1
N-
1 i =1 ( Hi
Key words Machine vision , Identification , Chinese date , Support vector machine
引言
GB 5835 —86 中对干制红枣的色泽要求是具有 本品种应有的色泽 。红枣的色泽是鲜枣经干制后的 自然色泽 ,皆为红色 。但由于成熟度不同和加工环 境的影响 ,致使红色程度有所差别 。另外 ,在枣的干 制过程中 ,容易形成油头枣 、浆头枣 、霉烂枣 ,这 3 类 枣是红枣中最常见的缺陷[1 ] 。如果在正常红枣中
图 3 正常红枣和缺陷红枣的 H 、σH 分布 Fig. 3 Distribution of H and σH
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved.
硬件的 , R 、G 、B 成分与人对颜色的感觉并无直接 的联系 。人眼主要通过颜色的亮度 、色度及饱和度
来辨别颜色 ,而 HIS 颜色系统正是根据人眼的这一 特性来描述颜色的 。HIS 模型的 3 个要素是色调 H 、饱和度 S 和亮度 I 。因此 ,本研究选取 HIS 颜色 空间模型来提取红枣的颜色特征值[6~7 ] 。
收稿日期 : 2007201212 3 江苏省自然科学基金资助项目 (项目编号 :B K2006552) 、高等学校博士学科点专项科研基金资助项目 (项目编号 :20040299009) 和江苏
省自然科学基金重点资助项目 (项目编号 :BJ 200670721) 赵杰文 江苏大学食品与生物工程学院 教授 博士生导师 , 212013 镇江市 刘少鹏 江苏大学食品与生物工程学院 硕士生 邹小波 江苏大学食品与生物工程学院 副教授 博士后 石吉勇 江苏大学食品与生物工程学院 硕士生 殷小平 江苏大学食品与生物工程学院 硕士生
值 ,利用支持向量机识别缺陷红枣 。实验结果表明 ,识别准确率可以达到 9612 % ,优于人工神经网络的 8914 %。
关键词 : 机器视觉 识别 红枣 支持向量机