陆标定位方法
《陆标定位方法》课件
简介
陆标定位方法是指利用陆标提 供的信息定位的方法。
应用场景
建筑测量、航拍测量、道路监 控等领域。
技术优势
定位精度高,可靠性强,适用 范围广。
陆标定位方法分类
1 GPS定位法
2 计算机视觉定位法 3 激光测距定位法
依靠全球定位系统卫星 提供的定位信息,精度 高,适用于大范围区域。
使用相机捕获现实世界 图像进行位置计算,精 度取决于图像质量。
3 发展展望
陆标定位方法将融合多种定位技术,应用领域不断拓展,市场空间巨大。
陆标定位方法发展趋势
1
技术改进
集成多种传感技术,提高定位精度和鲁棒性。
2
应用拓展
扩大定位技术领域,如农业、环保、智慧城市等。
3
市场前景预测
随着5G、物联网等新技术的普及,陆标定位技术市场前景广阔。
总结
1 操作规范
陆标定位方法对操作规范要求较高,需严格按照标准操作。
2 应用建议
选择合适的定位方法,结合实际情况进行定位。
计算机视觉定位法
工作原理 数据处理流程 精度控制
利用现实世界图像计算场景中物体的位置。
特征提取、目标匹配、立体视觉计算。
影响因素包括摄像头分辨率、光照条件、噪声 等。Βιβλιοθήκη 激光测距定位法工作原理
激光发射出去后被周围物体 反射返回时间来确定物体的 位置,精度高。
数据处理流程
激光测距仪采集激光反射信 号并计算反射时间,通过飞 行时间计算物体距离。
《陆标定位方法》PPT课 件
欢迎来到《陆标定位方法》课程,本课程将介绍陆标的定义、定位方法和比 较,以及展望未来发展。让我们开始吧!
什么是陆标
陆标的定义
7、陆标定位
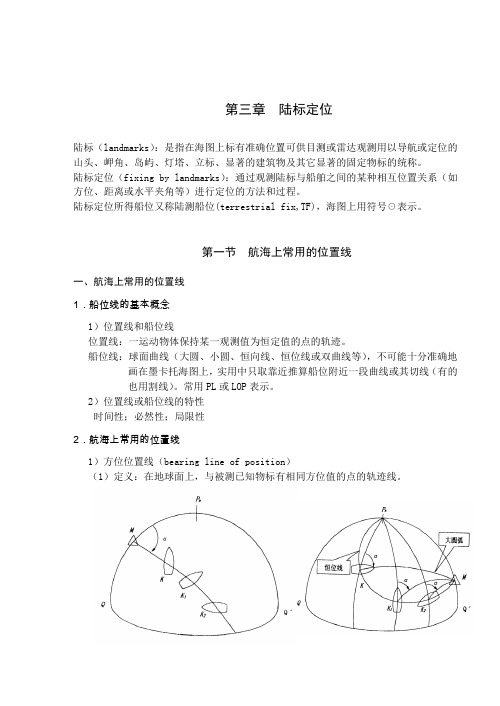
第三章陆标定位陆标(landmarks):是指在海图上标有准确位置可供目测或雷达观测用以导航或定位的山头、岬角、岛屿、灯塔、立标、显著的建筑物及其它显著的固定物标的统称。
陆标定位(fixing by landmarks):通过观测陆标与船舶之间的某种相互位置关系(如方位、距离或水平夹角等)进行定位的方法和过程。
陆标定位所得船位又称陆测船位(terrestrial fix,TF),海图上用符号☉表示。
第一节航海上常用的位置线一、航海上常用的位置线1.船位线的基本概念1)位置线和船位线位置线:一运动物体保持某一观测值为恒定值的点的轨迹。
船位线:球面曲线(大圆、小圆、恒向线、恒位线或双曲线等),不可能十分准确地画在墨卡托海图上,实用中只取靠近推算船位附近一段曲线或其切线(有的也用割线)。
常用PL或LOP表示。
2)位置线或船位线的特性时间性;必然性;局限性2.航海上常用的位置线1)方位位置线(bearing line of position)(1)定义:在地球面上,与被测已知物标有相同方位值的点的轨迹线。
(2)分类:①岸测船方位位置线大圆弧,在墨卡托海图上呈现为一条凸向近极、凹向赤道的曲线。
②船测岸方位位置线恒位线(line of equal bearing 或azimuth gleiche )。
③近距离时的方位位置线当物标与测者之间的距离较小(一般不超过30 n mile )时,一般取直线作为方位位置线的近似值。
2)距离位置线(distance line of position ) 在球面上呈现为一个球面小圆;在墨卡托海图上的投影则是一条复杂的“周变曲线”(非圆形); 在近距离和低纬度时,可以忽略这种变形。
3)水平角位置线(position line by horizontal angle ) 又称为方位差位置线。
水平角位置线实际上是以两个物标和船位三个点组成的圆弧,水平夹角α实际上是该圆周上对该两个点所夹的圆周角。
《航海学》船舶定位课件2_2陆标定位
可用以定位的陆标
首选物标——灯塔,孤立尖顶小岛
end
上海海事大学航海教研室制作 退出
用于目测的其它良好 物标——山峰 可选——岬角 其它可用物标: 只要海图有标注,且 有明显的可观测点的 物标 如油井架、高大的烟 囱等。
end
上海海事大学航海教研室制作 退出
二、方位定位
同时观测两个或两个以上陆标的方位来确定船位的 方法和过程称为方位定位,也称为方位交叉定位(fixing by cross landmarks)。 在航海实践中,通常采用两方位和三方位定位。
在M点,观测远方的船 舶得真方位, 从测者M画出的与测者 子午线(QMPNQ )相交 成真方位的大圆弧— —方位位置线。 因为,在M点观测该大 圆弧上任意点的真方 位均为 。
P N M P Q P 1 P 2 Q '
end
上海海事大学航海教研室制作 退出
(2)船测岸——位置线是恒位线
退出
4)物标的选择
选择物标的要求 (1)位置准确容易辨认的(孤立的、显著的)、离船近的物标; (2)选择方位位置线交角适当的物标。即,=90时最好。 尽可能选择位置线夹角为60~90的物标,最低要求应满足 30150。
灯塔
精测点 制高点 一般山头
end
上海海事大学航海教研室制作 退出
上海海事大学航海教研室制作 退出
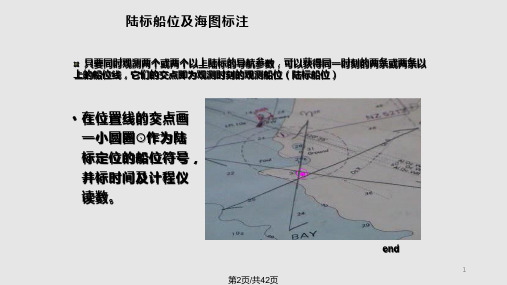
陆标船位及海图标注
只要同时观测两个或两个以上陆标的导航参数,可以获得同 一时刻的两条或两条以上的船位线,它们的交点即为观测时刻的 观测船位(陆标船位) 在位置线的交点画 一小圆圈☉作为陆 标定位的船位符号, 并标时间及计程仪 读数。
end
上海海事大学航海教研室制作 退出
陆标定位方法.pptx
34
3. 物标的选择和观测顺序
(1)选择物标的要求——与 方位定位相同 (2)对两物标观测顺序的要 求
①先观测距离变化慢的,即 船舶正横方向附近的物标B; 后观测距离变化快的,即船舶 首尾线方向附近的物标A。
A
②在夜间或能见度不良时测灯标,与测方位的 要求相同
第36页/共42页
B
end
35
观测顺序思考
A
❖试比较:先测A,后测B和先测B, 后测A的差别
结论
B
第26页/共42页
M2
M1
end
25
(2)不同观测顺序引起的船位差
别 若先测A先,测后测AB,后测B
得到观测船位F1, F1 与第二次观测时的实际船位M2之间的差为M2F1。
B CA
A
M2
F1
T1
M1
T2
第27页/共42页
end
26 结论
(2)不同观测顺序引起的船位差别 先测B,后测A
• A物标 TB1=CB1+第C18=页/共G4B2页1+G
17
定位步骤
• (4)画船位 在海图上,分别从物
A
标 A 按 TB1 的 反 方 向 ( TB1±180 )画出船 从位物线标B按TB2 的反方向( TB2±180 )画
出船位线 则两船位线的交点P0就是观测时刻的观 测船位。
为两船位线的夹角。
置线,其交点即为观测时刻的观测船位。
end
30
第31页/共42页
2)三方位定位优点
• 三方位定位时,其中的 一条方位线可以检验另 两条是否有差错。
• 如有差错,则可能会形 成较大的三角形。
• 因此,在条件许可时, 应尽可能同时观测三个 物标的三个方位来进行 定位。end
第四章 陆标定位
第四章陆标定位前面,我们讲了推算船位的方法。
由于我们在推算时所依据的资料并不很准确,所以得出的船位误差也较大。
这样就需要我们找出较为准确的定位方法,其中的一种就是陆标定位。
陆标定位既是观测视界内海图上确知其准确位置的陆标,然后根据观测结果在海图上从被观测目标的位置反推出观测时刻测者所在的船位。
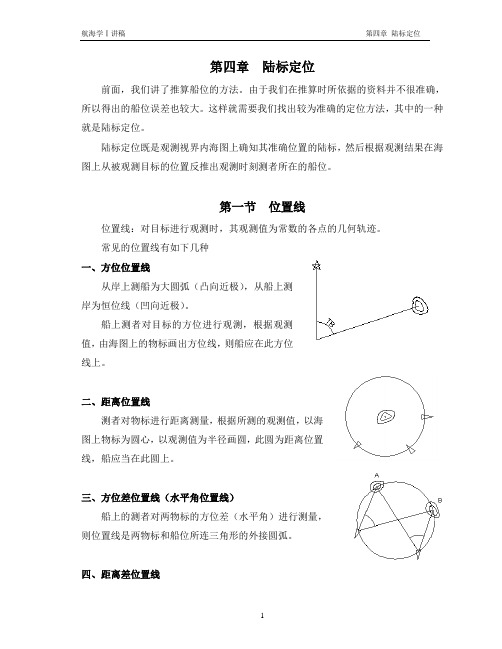
第一节位置线位置线:对目标进行观测时,其观测值为常数的各点的几何轨迹。
常见的位置线有如下几种一、方位位置线从岸上测船为大圆弧(凸向近极),从船上测岸为恒位线(凹向近极)。
船上测者对目标的方位进行观测,根据观测值,由海图上的物标画出方位线,则船应在此方位线上。
二、距离位置线测者对物标进行距离测量,根据所测的观测值,以海图上物标为圆心,以观测值为半径画圆,此圆为距离位置线,船应当在此圆上。
三、方位差位置线(水平角位置线)船上的测者对两物标的方位差(水平角)进行测量,则位置线是两物标和船位所连三角形的外接圆弧。
四、距离差位置线船上测者对两个台站进行距离差观测,则位置线是以两个站台为焦点的某对双曲线。
(恒位线:测某一目标都保持相同大圆方位的的等值线)船舶定位就是同时具有两条或两条以上位置线,其交点为船位。
第二节方位定位一、两物标方位定位1、定位方法同时测量两个物标的方位,则两条方位位置线的交点为船位。
例如:1000 CC = 95° ,ΔC = -5°测:物标A:CB = 355°物标B:CB = 065°求:1000 船位解:将罗方位换算成真方位。
TBA = CBA+ΔC = 350°TBB = CBB+ C= 060°作两条方位线,交点为船位。
陆标定位符号:2、选择目标的方法(1)、选择海图上精测的物标,并且选择离船近的物标。
(2)、两方位位置线的夹角尽量接近90°,夹角应在 30° -- 150°范围内。
(画图说明)3、观测物标的顺序(1)、白天测物标时,先测方位变化慢的(首尾方向)后测方位变化快的(正横方向)由图可见(2)、夜间测灯标时,先测闪光周期长的,后测闪光周期短的;先测闪光灯,后测定光灯。
陆标定位

陆标定位 中国海员之家网站搜集整理制作 http://www.seaman 一、一、方位定位 同时观测两个或两个以上陆标的方位来确定船位的方法和过程称为方位定 位,也称为方位交叉定位( 位,也称为方位交叉定位(fixing by cross landmarksfixing by cross landmarks )。
在航海实践中,通常采用 在航海实践中,通常采用两方位 两方位和 和三方位定位 三方位定位。
一、一、方位定位 1.1.两方位定位 同时观测两个陆标的方位,可以获得同一时刻的两条方位位置线,其交点即为观测时 刻的观测船位。
例如:某船 例如:某船1000 1000测得日庄礁灯标 测得日庄礁灯标TB273 TB273° °, ,七星礁灯标 七星礁灯标TB038 TB038°°, ,则可定得 则可定得1000 1000船位如图: 船位如图: 1000日庄礁 七星礁endend一、 一、方位定位方位定位 1 1)测方位的仪器)测方位的仪器— —航海雷达 雷达图像 雷达图像一、一、方位定位 测方位的仪器 测方位的仪器——罗经 陀螺罗经陀螺罗经复 示器示器或磁 罗经罗经2 2)定位步骤 )定位步骤— —选、测、算、选、测、算、画 ( (1 1) )选择和确认欲观测的物标 选择和确认欲观测的物标,如 ,如A A 、、B ( (2 2))测 利用磁罗经或陀螺罗经复示器观测 利用磁罗经或陀螺罗经复示器观测A A 、 、B B 物标的方位得到 物标的方位得到CB 1 , ,CB 2 或 或GB 1 , GB 2; ( (3 3))算 将 将CB 1 , ,CB 2 或 或GB 1 , GB 2换算成真方位 换算成真方位TB TB , ,即: A A 物标 TB 1 =CB 1 + +D D C=GB 1+ +D D G B B 物标 TB 2 =CB 2 + +D D C=GB 2+ +D D G G A B2 2)定位步骤)定位步骤— ( (4 4) )画画船位 在海图上,分别从物标 在海图上,分别从物标A A 按 按TB 1 的反方向( TB 1± ±180 180° )画出船位线 )画出船位线 AB P q q 从物标 从物标B B 按 按TB 2 的反方向( TB 2± ±180 180° )画出船位线 则两船位线的交点 则两船位线的交点P 0 就是观测 时刻的观测船位。
《陆标定位方法》课件

THANKS
感谢观看
定位算法
滤波算法
如卡尔曼滤波、扩展卡尔曼滤波 等,用于提高定位精度和稳定性
。
地图匹配算法
将定位数据与地图数据进行匹配, 以提高定位精度和可靠性。
路径规划算法
用于规划最优路径,提高导航和定 位效率。
误差分析和优化
误差来源分析
误差补偿和优化
分析定位误差的来源,如传感器误差 、数据处理误差等。
采用各种方法对误差进行补偿和优化 ,如加权平均、滤波算法等。
03
通过集成化设计和技术创新,降低陆标定位设备的成本和体积
,提高便携性。
05
陆标定位方法的应用案例
智能交通领域应用案例
智能车辆导航
陆标定位方法被广泛应用于智能 车辆的导航系统,通过识别道路 标志、交通信号灯等陆标,实现 车辆的精确导航。
交通监控与管理
智能交通系统利用陆标定位技术 对道路状况进行实时监控,对交 通拥堵、事故等进行快速响应和 调度管理。
对于需要实时性要求极高的应用,如自动 驾驶,陆标定位方法的响应速度可能无法 满足要求。
未来发展方向
融合其他定位技术
01
未来可以通过融合其他定位技术,如惯性导航、指纹识别等,
提高陆标定位方法的精度和可靠性。
优化算法和模型
02
通过改进算法和模型,降低对基础设施的依赖,提高在复杂环
境中的抗干扰能力。
降低成本和提高便携性
陆标定位方法的应用场景
陆标定位方法适用于室内和室外环境,尤其在室内环境中具有较高的定位精度和 稳定性。
在智能家居、智慧物流、无人驾驶等领域,陆标定位方法被广泛应用于物品跟踪 、机器人导航、人员定位等方面。
02
陆标定位

g1 =
1 D1
和 g2 =
1 D2
D
A d
B
g = g 12 + g 2 − 2 g 1 g 2 cos α
=
a1
h
a2 g g2 a
D2
1 2 D12 + D2 − 2 D1 D 2 cos α D1D 2 d sin α = = D1D 2 h
g
a
K
梯度方向: 指向由测者和两个固定物标组 g1 成的圆的圆心。 5)双曲线位置线的梯度 设测者测得已知其准确位置的两个物标的距离之差 ∆D 为:
第一节
航海上常用的位置线
一、航海上常用的位置线 1.船位线的基本概念 1)位置线和船位线 位置线:一运动物体保持某一观测值为恒定值的点的轨迹。 船位线:球面曲线(大圆、小圆、恒向线、恒位线或双曲线等) ,不可能十分准确地 画在墨卡托海图上,实用中只取靠近推算船位附近一段曲线或其切线(有的 也用割线) 。常用 PL 或 LOP 表示。 2)位置线或船位线的特性 时间性;必然性;局限性 2.航海上常用的位置线 1)方位位置线(bearing line of position) (1)定义:在地球面上,与被测已知物标有相同方位值的点的轨迹线。
(D>>H>e 且 H>BE) 2. 测量物标小水平角求距离 当小岛两端 A、 B 与本船的距离大致相等的情况下, 在航用海图上可以量得小岛的长 度 AB=d; 测量小岛 A、B 两端对船的张角α, 则本船与小岛之间的距离可以根据下式求得: D(n mile)=
3438 d (m) d (m) × = 1.856 1852 α' a'
第三章
陆标定位
陆标(landmarks) :是指在海图上标有准确位置可供目测或雷达观测用以导航或定位的 山头、岬角、岛屿、灯塔、立标、显著的建筑物及其它显著的固定物标的统称。 陆标定位(fixing by landmarks) :通过观测陆标与船舶之间的某种相互位置关系(如 方位、距离或水平夹角等)进行定位的方法和过程。 陆标定位所得船位又称陆测船位(terrestrial fix,TF),海图上用符号☉表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
方位315° 距离15海里
end 9
3.利用实测船位识别
1)在利用已认识的物标测定船位时,同时观测前方待识别物标的 方位。在海图上画出船位后,从船位画出待识别物标的方位线。 (1)如图,A,B为已 知物标,C为待识别物 标。 (2)当测定A,B物标 的方位时,同时测定待 识别物标C (3)在海图上用A,B 方位画出船位后,从船 位出发画待识别物标的 真方位线。此线近似通 过待识别物标。 end
end
39
第五节 单物标方位、距离定位
方法——同时观测单一物标的方位和距离,则同一时
刻的该物标的方位位置线和距离位置线的唯一交点就 是观测时刻的船位。
应用——雷达 方位距离定位 end
40
方位距离定位的优点
单物标方位距离定位的最大优点在于:位置线的交角θ 始 终等于90°。因此,单物标方位距离定位的船位误差完全 取决于观测方位和距离的精度。 end
21
问题——如何保证观测船位是准确 的??
保证观测船位准确的前提: (1)辨认物标要准确 (2)物标分布要合理 (3)观测误差小 (4)应同时观测 但一般做不到同时观测——且以第二次观测时刻 作为船位时间——如何处理?? end
22
物标的选择
选择物标的要求 (1)位置准确容易辨认的(孤立的、显著的)、离船近的物标; (2)选择方位位置线交角适当的物标。即,=90时最好。尽 可能选择位置线夹角为60~90的物标,最低要求应满足 30150。
第三章 陆标定位
3.1 陆标的识别方法 3.2 海上陆标方位、距离的测定 3.3 方位定位 3.4 距离定位 3.5 单物标方位、距离定位
1
概述
陆标(landmarks)——在海图上标有准确位置的陆上物标的 统称。
陆标定位(fixing by landmarks)——是指观测陆标的方位、 距离、方位差(称它们为导航参数)或它们的组合等来确定船 位的方法和过程。 常用的陆标定位方法有 方位定位 距离定位 单物标方位、距离定位。 end
A D1 d θ D2 P CA
B
36
3. 物标的选择和观测顺序
(1)选择物标的要求——与方 位定位相同
(2)对两物标观测顺序的要求
①先观测距离变化慢的,即船 舶正横方向附近的物标B;后观 测距离变化快的,即船舶首尾 线方向附近的物标A。
A ②在夜间或能见度不良时测灯标, 与测方位的要求相同
B
end
A B
TB1
C
CA
F1
10
3.利用实测船位识别
下一次定位时,重复上述步骤。
则从两(三)个实 测船位所画出的两 (三)条方位线将 基本交于海图上的 某一物标,该物标 即为待识别的物标。
A
B
TB1
C
TB2
CA
F1
F2
end
11
4.利用GPS船位识别
2)利用GPS船位识别未知物标。 即在读取GPS船位经纬度的同时测定待识别 B 物标的真方位TB。 A
37
观测顺序思考
1000,测两方位,先测哪个灯标? 1030,测两距离,先测 哪个灯标 ? 1000,首尾方向(日庄灯标)。1030,先测正横方向(七星 end 礁灯标)
38
4. 三距离定位
同时测得视界内三 个物标的距离后, 在海图上分别以三 个物标为圆心,以 所测距离为半径画 圆弧,得到一个交 点或小三角形,即 为观测时刻的观测 船位。
19
定位步骤
(4)画船位 在海图上,分别从物标 A 按 TB1 的 反 方 向 ( TB1±180 )画出船位 线
A
B
从物标B按TB2 的反方向 ( TB2±180 )画出船位线
则两船位线的交点P0就是观测 时刻的观测船位。 为两船位线的夹角。
P0
end
20
两方位定位举例
例:某船CA280 ,△C1 5。1000 L308′.5,测 得日庄礁灯标CB275 , 七星礁灯标CB0465, 请画出1000船位。 解:1)求真方位: TB日=275- 1 5=2735 TB七=0465- 15=045 2)作图 end
end
7
1.利用对景图识别——对照
8
2.利用等高线识别
在大比例尺(大 于1:150 000)海 图上,山形通 等高线愈密,表 示山形愈陡峭; 常是用等高线 描述出来的。 等高线愈疏,表
示山形愈平坦。
400 300 200 方位000°,距离15海里 100 0
0 40 00 3 00 2 00 1 0
2
陆标船位及海图标注
只要同时观测两个或两个以上陆标的导航参数,可以获得同 一时刻的两条或两条以上的船位线,它们的交点即为观测时刻的 观测船位(陆标船位)
在位置线的交点画 一小圆圈☉作为陆 标定位的船位符号, 并标时间及计程仪 读数。
end
3
可用以定位的陆标
首选物标——灯塔,孤立尖顶小岛
end
但若以第一次观测时刻记船位时间,则先测B,后测A 。 B CA A
先测A,后 测B的船位F1 M2
先测B,后测 A的船位F2
M1
end
30
二、 三方位定位
两方位定位简单、方便,但一般相交于 唯一点,测者只能以此为观测船位,无 法判断观测的差错及船位的准确性。
end
31
1)三方位定位方法
同时观测三个陆标的方位,可以获得同一时刻的三条方位位置 线,其交点即为观测时刻的观测船位。 end
41
思考
单物标方位距离定位的观测顺序有何要求?
原则:先测被测值变化慢的、难测的
end
42
end
14
2.测方位的仪器—航海雷达
雷达图像
end
15
二、 航海上测定距离的方法
利用雷达观测物标的距离 雷达是航海上最常用的测量物标距离的仪器。 测距时应注意的问题: 最好选用孤立的小岛、岬角和凸堤,避免选用平坦的 海岸线、斜缓的山坡和位置未经核实的浮标。 应尽量选择包含被测物标的最小量程,被测物标的回 波最好位于距离荧光屏中心2/3屏半径附近。 点状物标应测量回波的中心;雷达应答标应测量其编 码脉冲信号前沿(靠近荧光屏中心一端);位于雷达 地平内的物标应使活动距标圈的前沿与其内沿相切; 位于雷达地平外的物标应使活动距标圈的外沿与其外 沿相切。
精测点 制高点 一般山头
灯塔
end
23
5)观测顺序——提问
如图,哪个物标的方位变化快?
A
B
end
24
5)观测顺序——白天
(1)对两物标观测顺序的要求
①先观测方位变化慢的,即船舶首尾线方向附近的物标,如A; 后观测方位变化快的,即船舶正横方向附近的物标,如B。
B A
end
25
5)观测顺序——夜间
32
2)三方位定位优点
三方位定位时,其中的 一条方位线可以检验另 两条是否有差错。 如有差错,则可能会形 成较大的三角形。 因此,在条件许可时, 应尽可能同时观测三个 物标的三个方位来进行 定位。end
33
3)三物标的选择
三物标定位的物标选择(方位分布大于180° ) 最好:两两夹角为120° 最低要求:两两夹角为30°~ 150°
4
用于目测的其它良好 物标——山峰 可选——岬角
其它可用物标: 只要海图有标注,且 有明显的可观测点的 物标 如油井架、高大的烟 囱等。
end
5
第一节
辨认物标的基本方法
1.利用对景图识别
2.利用等高线识别
3.利用实测船位识别
6
1.利用对景图识别
在航用海图上或航路指南中附有如下所示的某些山 形的照片或图片 ,即对景图,并注明该图是在某一方 位、距离上观看时的形状。
16
第三节
方位定位
同时观测两个或两个以上陆标的方 位来确定船位的方法和过程称为方位定 位,也称为方位交叉定位(fixing by cross landmarks)。 在航海实践中,通常采用两方位和 三方位定位。
end
17
一、 两方位定位
同时观测两个陆标的方位,可以获得同一时刻的两条方位位置 线,其交点即为观测时刻的观测船位。 例如:某船1000测得日庄礁灯标TB273○ ,七星礁灯标 TB038○,则可定得1000船位如图:
七星礁
日庄礁
1000
end
18
定位步骤—选、测、算、画
A B
(1)选择和确认欲观测的物标,如A、B
(2)测 利用磁罗经或陀螺罗经复示器观测A、B物标的方 位得到CB1,CB2或GB1,GB2; (3)算 将CB1,CB2或GB1, GB2换算成真方位TB,即: A物标 TB1=CB1+C=GB1+G B物标 TB2=CB2+C=GB2+G end
C
如图,读GPS船位F1时 测待识别物标的真方位 TB1
读F2时测待识别物标的 真方位TB2……。
TB1
F1
TB2
F2
TB3
F3
CA
end
12
第二节
海上陆标方位、距离的 测定
一、海上陆标方位的测定 1. 利用罗经观测物标方位 2. 利用雷达观测物标方位
13
1.测方位的仪器—罗经
陀螺罗 经复示 器或磁 罗经eBiblioteka d34第四节 距离定位
1. 两物标距离定位