工业机器人种类介绍
现代机器人的种类

现代机器人的种类
现代机器人是指能够执行自主或预设任务的机械设备,它们可以在工业、医疗、军事、探险等领域发挥重要的作用。
现代机器人的种类繁多,主要可以分为以下几类:
1. 工业机器人:主要用于生产线上的制造、装配和包装等工作。
常见的工业机器人包括SCARA机器人、Delta机器人、直线型机器人等。
2. 服务机器人:主要用于服务和辅助人类的生活,如清洁机器人、餐厅服务机器人、陪伴机器人等。
3. 医疗机器人:主要用于医疗领域的手术、诊断和治疗等工作,如手术机器人、康复机器人、心电图机器人等。
4. 军事机器人:主要用于军事领域的侦察、救援、炮火支援等工作,如无人机、地面机器人、水下机器人等。
5. 探险机器人:主要用于探险和科学研究领域,如火星探测器、深海探测器、极地探险机器人等。
以上是现代机器人的主要种类,随着科学技术的不断进步,机器人的种类和应用领域将继续扩展。
- 1 -。
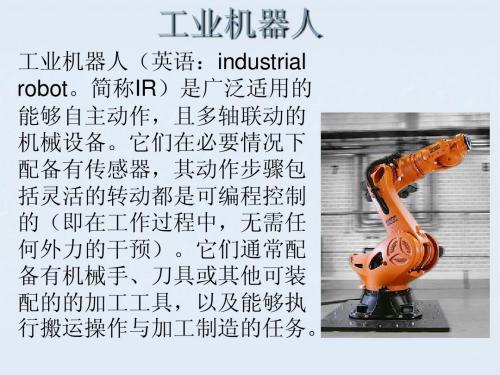
工业机器人介绍
2、健康福利服务机器人
健康福利服务机器人是指在 医院里为医生或病人提供服 务的服务机器人。图中是直 接为病人提供康复治疗的服 务机器人。他可以提供指定 负载力和行走速度的步行训 练和为腿部受伤的病人提供 术后康复训练治疗。许多研 究单位和公司正在积极开发 的各种类型的智能轮椅和智 能病床也都属于健康福利服 务机器人。
工业生产中的应用
工业机器人在工业生产中能代替人
做某些单调、频繁和重复的长时间 作业,或是危险、恶劣环境下的作 业,例如在冲压、压力铸造、热处 理、焊接、涂装、塑料制品成形、 机械加工和简单装配等工序上,以 及在原子能工业等部门中,完成对 人体有害物料的搬运或工艺操作。
构造与分类
工业机器人由主体、驱动系统和控制系统三个基本部 分组成。主体即机座和执行机构,包括臂部、腕部和 手部,有的机器人还有行走机构。大多数工业机器人 有3~6个运动自由度,其中腕部通常有1~3个运动 自由度;驱动系统包括动力装置和传动机构,用以使 执行机构产生相应的动作;控制系统是按照输入的程 序对驱动系统和执行机构发出指令信号,并进行控制。
间接驱动方式图例(1):
间接驱动方式图例(2):
3.材料的选择:
选择机器人本体的材料,应从机器人的性 能要求出发,满足机器人的设计和制造要 求。如: 机器人的臂和机器人整体是运动的,则要 求采用轻质材料。 精密机器人,则要求材料具有较好的刚性。 还要考虑材料的可加工性等。 机器人常用的材料有:碳素结构钢、铝合 金、硼纤维增强合金、陶瓷等。
二、服务机器人分类
按服务对象和应用目的不同,可以分为以下六类: 医疗服务机器人 健康福利服务机器人 公共服务机器人 家庭服务机器人 娱乐机器人 教育机器人
现代机器人的种类

现代机器人的种类
现代机器人的种类繁多,主要可以分为以下几类:
1. 工业机器人:是一种用于工业制造的机器人。
主要用途包括零部件的生产、组装和加工等。
工业机器人通常采用多自由度结构、灵活的末端执行器、高精度控制系统等。
2. 服务机器人:是一种用于为人类服务的机器人。
主要应用于医疗、教育、餐饮、家居等领域。
服务机器人通常具有人形外观、语音识别、视觉识别、情感交流等特点。
3. 农业机器人:是一种用于农业生产的机器人。
主要用途包括种植、采摘、喷洒农药等。
农业机器人通常具有自主导航、精准作业、数据采集等特点。
4. 消防救援机器人:是一种用于消防救援的机器人。
主要用途包括火灾扑救、搜索救援等。
消防救援机器人通常具有耐高温、抗爆炸、自主导航等特点。
5. 探险机器人:是一种用于探险作业的机器人。
主要用途包括海底探测、太空探索等。
探险机器人通常具有自主导航、远距离控制、环境适应等特点。
除了以上几类机器人外,还有许多其他种类的机器人,如智能家居机器人、教育机器人、娱乐机器人等。
未来,随着科技的不断进步,机器人的应用领域也将越来越广泛。
- 1 -。
工业机器人四大家族
工业机器人四大家族全球工业机器人的四大家族——ABB、KUKA、发那科以及日本的安川电机。
一、瑞士ABBABB(Asea Brown Boveri),是一家瑞士-瑞典的跨国公司,专长于重电机、能源、自动化等领域。
在全球一百多国设有分公司或办事处。
总公司设于瑞士的苏黎世。
ABB是机器人技术的开拓者和领导者,早在1974年就发明了世界上第一台工业机器人。
ABB拥有当今最多种类的机器人产品、技术和服务。
目前,ABB机器人业务部的全球装机量已超过16万台,是全球装机量最大的工业机器人供应商。
目前,ABB机器人在中国开展了全方位的业务活动,包括制造、研发、销售、工程和服务等,拥有领先的市场份额。
ABB机器人业务部在国内研发、制造的产品和系统设备行销全球市场,例如:欧洲沃尔沃汽车发动机生产线、印度TATA汽车机器人弧焊工作站、马来西亚伟创力机器人涂装线等。
二、德国kuka库卡公司最早于1898年由Johann Josef Keller和Jakob Knappich在奥格斯堡建立。
最初主要专注于室内及城市照明,但不久就涉足至其它领域(焊接工具及设备,大型容器),1966年成为欧洲市政车辆的市场领导者。
1973年公司研发了其名为FAMULUS第一台工业机器人。
当时库卡公司属Qu[and]t集团旗下,而Qu[and]t家族则于1980年退出。
1995 年库卡机器人技术脱离库卡焊接及机器人有限公司独立成立有限公司,与库卡焊接设备有限公司(即后来的库卡系统有限公司),同属属于库卡股分公司(前身IWKA集团)。
现今库卡专注于向工业生产过程提供先进的自动化解决方案。
库卡机器人公司总部在德国奥格斯堡。
公司主要客户来自汽车制造领域,但在其他工业领域的运用也越来越广泛。
包括:系统信息、应用领域、物流运输、食品行业、建筑行业、玻璃制造行业、铸造和锻造业、木材行业、金属加工行业、石材加工等。
三、日本发那科FANUC 公司创建于1956年,1959年首先推出了电液步进电机,在后来的若干年中逐步发展并完善了以硬件为主的开环数控系统。
机器人的定义与分类

机器人的定义与分类机器人是指能够执行特定任务的自动化机械设备或人造生物。
随着科技的迅猛发展,机器人已经成为现代社会不可或缺的一部分。
本文将就机器人的定义和分类展开论述。
一、机器人的定义机器人的定义可以从不同角度来解释。
从技术角度来看,机器人是一种能够感知环境、具有自主决策能力并能够执行任务的智能设备。
它们通常采用传感器来感知周围环境,并通过程序控制来进行决策和行动。
从功能角度来看,机器人是一种具备代替人类工作的能力的机械设备。
机器人可以执行重复性、危险性或高精确度的任务,从而减轻人类的劳动负担,提高生产效率。
从形态角度来看,机器人被设计成各种各样的形态,可以模拟人类的动作和行为,也可以是一种具备特定功能的工具。
机器人的形态多种多样,有人形机器人、工业机器人、无人机等。
二、机器人的分类根据机器人的功能和应用领域的不同,可以将机器人分为以下几类。
1. 工业机器人工业机器人主要用于工业生产线上的操作。
它们通常具备精确度高、速度快、执行强度大的特点。
工业机器人广泛应用于汽车制造、电子产品生产等领域,能够完成装配、焊接、包装、搬运等工作。
2. 服务机器人服务机器人是为服务人类而设计的机器人。
它们可以用于家庭、医疗、酒店、商场等场景,为人们提供各种各样的服务。
比如,清洁机器人可以帮助打扫房间、擦拭地面;机器人导购员可以提供购物建议和指导;医疗机器人可以辅助医生进行手术等。
3. 农业机器人农业机器人是应用于农业领域的机器人。
它们可以辅助农民进行土地耕作、播种、施肥、除草等工作。
农业机器人的出现提高了农业生产的效率和质量,也减少了农民的体力劳动。
4. 救援机器人救援机器人主要用于救援和灾难应对任务。
它们可以在火灾、地震等紧急情况下进行搜救和救援工作,有助于减少人员伤亡。
救援机器人通常具备灵活性和适应性强的特点,能够在复杂环境中执行任务。
5. 娱乐机器人娱乐机器人主要用于提供娱乐和休闲服务。
它们可以为人们提供陪伴、交互游戏等娱乐项目。
工业机器人的分类—按机械结构分类
2.并联机器人
并联机器人可以定义为动平 台和定平台通过至少两个独立的运 动链相连接,机构具有两个或两个 以上自由度,且以并联方式驱动的 一种闭环机器人。
2.并联机器人
按照并联机构的自由度分类: 两自由度并联机构
三自由度并联机构
四自由度并联机构
五自由度并联机构
六自由度并联机构
按照并联机构的自由度分类——两自由度并联机构
按照并联机构的自由度分类——四自由度并联机构
四自由度并联机构大多不是完全并联 机构,如2-UPS-1-RRRR机构,运动 平台通过3个支链与定平台相连,有2 个运动链是相同的,各具有1个虎克铰 U、1个移动副P,其中P和其中一个的 R是驱动副,因此这种机构不是完全 并联机构。
按照并联机构的自由度分类——五自由度并联机构
以下是按照设备的结构形式和用途对 机器人进行分类。
机械结构 (坐标形式)
用途
根据结构形式分类
串联机器人 并联机器人
1.串联机器人
根据结构形式分类
串联机器人是开式运动链,它是由一系列 连杆通过转动关节或移动关节串联而成。 关节由驱动器驱动,关节的相对运动导致 连杆的运动,使手爪到达一定的位姿。
1.串联机器人
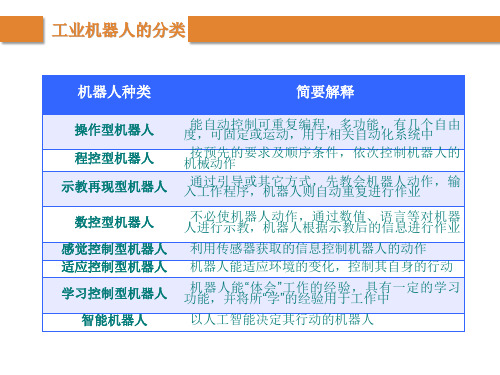
工业机器人的分类
机器人种类
简要解释
操作型机器人 程控型机器人 示教再现型机器人
能自动控制可重复编程,多功能,有几个自由 度,可固定或运动,用于相关自动化系统中 按预先的要求及顺序条件,依次控制机器人的 机械动作 通过引导或其它方式,先教会机器人动作,输 入工作程序,机器人则自动重复进行作业
数控型机器人 感觉控制型机器人 适应控制型机器人 学习控制型机器人
1.串联机器人——⑷多关节机器人
多关节型机器人由多个旋转和摆动机构组合而成。 纯球状
机器人介绍
由实际连杆的非刚性因素引起的谐振效应是影响加速度闭环稳定性的最主要因素.加 速度传感器检测到的谐振可以等效地用Gs ( s) 表示, 并体现在加速度反馈的开环频 率响应中. 图3是加速度开环频率响应的示意图( 只考虑两个谐振峰, 其余的多个由于 加速度传感器及系统自身的高频衰减特性而被忽略) . 加速度开环特性:
3.加速度反馈的开环特性:
式中XS 是Sn 的带宽, R> 0. 式 ( 18) 确保在动力学扰动Sn 的频 带[ 0, XS] 内, 加速度闭环对其具 有抑制作用.
其中第一谐振峰 Xr1≈131Hz, 幅值 r1≈13dB, 相位滞后 U1≈- 78°;第二谐振 峰Xr2≈200Hz, 幅值 r2≈17dB, 相位滞后 U2≈- 180°.据此综 合出加速度反馈的 开环模型为
蒋新松
他是我国机器人事业的开拓者,在多种机器人的研 究、开发、工程应用及产业化方面作出了开创性的 贡献 一、提出、组织并直接负责水下机器人的研究、开发 及产品系列化工作。 二、负责组织研制工业机器人及特种机器人。 三、创建国家机器人技术研究开发工程中心和机器人 学开放实验室。 四、参加制订"863"计划,担任自动化领域专家委员 会首席科学家。
其中G ac( s) 是加速度闭环传递函数, GaS( s) 是加速度闭环对扰动的抑制函数, 且
式中Xv 是不存在加 速度反馈控制时关 节速度的闭环响应 带宽, U是给定的相 位滞后上限; 式( 17) 将加速度反 馈控制在速度闭环 内产生的相位滞后 约束在期望的范围 之内, 以此达到几乎 不影响速度闭环的 要求;
娱乐机器人:
在2005年春节晚会上,我们惊奇地看
到为刘德华伴舞的竟然有两个机器人, 奇特的舞姿给很多人留下了深刻的印 象,“他们”是谁?索尼公司的娱乐 机器人——QRIO。QRIO从立项到开 发成功经历5年的时间,身高58cm, 体重7kg,但是却具有非常强大的运动、 思考、辨别能力,全身38个关节、18 轴传感器,依靠3颗64位RISC处理器, 能够实现思维、对话和运动等功能, 单纯使用机内电池就能供它“活动” 时间超过1小时。
机器人的种类 PPT课件
机器人第一类:刚
一:工业机器人; 二:农业机器人; 三:军用机器人等 。
机器人第二类:柔
服 务
型
机
器
人
工业机器人 采用分布式CPU计 算机结构,主要用 于自动化生产线上。 工业机器人还可以 细分为 点焊机器人 弧焊机器人 激光加工机器人 真空和洁净机器人
动 速
具 有
性
点焊机器人和弧焊机器人
陪护机器人应用于养老院 或社区服务站环境。机器 人具有血压、心跳、血氧 等生理信号检测与监控功 能,可无线连接社区网络 并传输到社区医疗中心, 紧急情况下可及时报警或 通知亲人。机器人具有智 能聊天功能,可以辅助老 人心理康复。陪护机器人 为人口老龄化带来的重大 社会问题提供解决方案。
教育科研室内外平台
设设开创术从究大是 计计发新、事生学专 的、、性学各、生门 平课毕课术类教、用 台程业题、技师研于
未来的机器人?
自小子,敢 跟我打吗?
不要,还作
快稳 和定
点焊用于汽车整车的焊接工作,
负
荷 能 力
、 工 作
空
而弧焊用于精细零部件方面
强间
等大
特 点
、
运
农业机器人应用:
农业机器人主要应用于除草、采摘、 分检、施肥
军用机器人de应用:
用于直接遂行战斗任务; 用于侦察和观察 用于工程保障 用于指挥、控制 用于后勤保障
军用机器人的分类:
地面机器人 无人机 水下机器人 空间机器人
无人机上装有人工智能计算机,不 仅仅是同学认为的遥控直升机的升 级版。
无人侦察机可用于完成战场侦察和 监视、定位校射、毁伤评估、电子 战等;也可民用,如核辐射探测、 航空摄影、航空探矿、灾情监视、 交通巡逻、治安监控等。
工业机器人基础知识
1. 1 认识工业机器人
• 四轴并联机器人又名蜘蛛手机器人、DELTA 机器人, 四个关节呈并联 结构, 运行速度快, 用于食品、药品分拣等应用领域, 如图1-8 所示。
• 3. 按机器人应用分类 • “中国制造2025” 战略规划的提出, 使制造业向数字化、网络化、智
能化方向发展, 工业机器人作为智能制造领域的重要载体, 已广泛应用 于汽车及其零部件制造业、机械加工行业、3C 行业、橡胶及塑料工 业、食品、医药、陶瓷卫浴、木材与家具制造业等领域, 见表1-1。机 器人产品也已涉及焊接、装配、搬运、上下料、冲压、铸锻、注塑、 折弯、码垛、喷涂等应用。短短40 年内, 机器人技术得到了迅速发展 。
• 1. 1. 3 工业机器人的组成
上一页 下一页 返回
1. 1 认识工业机器人
• 工业机器人由机械系统、驱动系统、控制系统和感知系统组成, 如图 1-1 所示。
• 机械系统即机器人的身体, 包括机座、臂部、手腕、末端执行器、行 走机构等; 驱动系统即机器人的肌肉, 主要有电气驱动、液压驱动和气 压驱动三种类型; 控制系统即机器人的大脑, 由计算机控制软件和硬件 组成; 感知系统即机器人神经系统, 由内部传感器和外部传感器组成。
• 1. 1. 4 工业机器人的分类
• 关于工业机器人的分类, 国际上没有制定统一的标准, 一般按照应用领 域、机械结构特征、自由度数等进行分类。
上一页 下一页 返回
1. 1 认识工业机器人
• 工业机器人还处在起步发展阶段, 需要进行不断完善和发展, 本书主要 介绍如下几种分类方法。
• 1. 按机器人的技术等级分类 • (1) 示教再现机器人(第一代工业机器人) • 能够按照人类预先示教的轨迹、行为、顺序和速度重复作业, 操作员
工业机器人论文
工业机器人应用技术论文论文题目:工业机器人论文编号:81115180126论工业机器人摘要:机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多种学科而形成的高新技术。
机器人一般是由机械本体、控制器、伺服驱动系统和检测传感装置构成,是一种综合了人和机器的特长、能在三维空间完成各种作业的机电一体化装置。
它具有人对环境状态的反应,也有机器可以长时间工作、精确度高、坑恶劣环境的能力,可以用来完成人类无法完成的工作。
随着电脑技术、电子产品及生物遗传工程等技术的大踏步的发展,机器人的研发热潮已经从实验室走进了生产流水线,走进了人类的生活。
关键词:机器人组成分类应用正文:一、工业机器人的组成工业机器人一般由机械结构系统、伺服驱动系统、检测装置和控制系统四个基本部分组成。
大多数机器人有3~6个运动自由度,其腕部通常有1~3个运动自由度。
(一)机械结构系统:即机器人‘‘本体’’,由机身、手臂、手腕和末端执行器四大件组成。
图1 机器人机械结构系统1--手部(末端执行器);2--手腕;3--手臂;4--机身(二)伺服驱动系统:伺服驱动系统包括动力装置和传动机构,用于使执行机构产生相应的动作。
(三)检测装置:由内部传感器和外部传感器组成,其作用就是获取机器人内部和外部的信息,并把这些信息反馈给控制系统。
(四)控制系统:控制系统按照输入的程序对驱动系统和执行机构发出指令信号并进行控制,控制系统的任务是根据机器人的作业指令程序以及从传感器反馈回来的信息,支配机器人的执行机构去完成规定的运动和功能。
控制系统有两种分式。
一种是集中控制,即机器人的全部控制由一台微型计算机完成。
另一种是分散(级)式控制。
二、工业机器人的分类工业机器人有哪些分类?随着人类对机器人的深入研究,机器人的种类也是五花八门,工业机器人按照不同的分类标准可以分为不同的类别。
(一)按照工业机器人的运动形态分类直角坐标型工业机器人、圆柱坐标型工业机器人、球坐标型工业机器人、多关节型工业机器人、平面关节型工业机器人和并联型工业机器人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业机器人种类介绍
工业机器人是指具有自主操作、具备灵活技能和重复操作能力、广泛应用于生产线的机器。
在现代制造业中,工业机器人已经成为不可缺少的一部分。
本文将介绍几种常见的工业机器人种类,包括焊接机器人、搬运机器人、装配机器人和喷涂机器人等。
一、焊接机器人
焊接机器人是工业机器人中最常见的一种。
它们通常用于实现高精度的焊接操作,无论是点焊还是弧焊。
焊接机器人能够通过激光或者视觉传感器精确地感知和定位工件,从而实现高质量的焊接。
这些机器人通常具备多轴自由度,可以在复杂的空间环境中进行操作。
二、搬运机器人
搬运机器人主要用于物料的搬运和装卸。
它们通常具有较大的负载能力和高速度,能够有效地完成生产线上的物料搬运任务。
搬运机器人可以根据需求进行编程,从而实现自动的物料搬运,提高生产效率和减少人力成本。
同时,它们还能通过传感器避免碰撞,确保操作的安全性。
三、装配机器人
装配机器人用于完成产品的组装工作。
它们通常具备高度的柔性和精确性,能够在短时间内完成复杂的装配任务。
装配机器人可以通过视觉传感器或者力传感器实现对零部件的检测和定位,从而保证装配
的质量和准确性。
这些机器人还可以与其他自动化设备进行集成,实现全面的装配流程。
四、喷涂机器人
喷涂机器人主要用于涂装工作,如汽车涂装和工业喷漆。
由于其高度的精确性和均匀性,喷涂机器人能够提供高质量的涂装效果。
这些机器人通常搭载喷雾器和喷涂枪,可以通过传感器实现对工件表面的检测和监控,从而实现精确的喷涂过程。
喷涂机器人还具备高速操作和快速换色的能力,可以满足生产线上的不同涂装需求。
总结:
工业机器人是现代制造业中不可或缺的一部分。
通过介绍焊接机器人、搬运机器人、装配机器人和喷涂机器人等几种常见的工业机器人种类,我们可以看到它们在不同的领域中发挥着重要的作用。
随着技术的不断进步,工业机器人将会越来越智能化和自动化,为制造业的发展带来更多的机会和挑战。