基于sift的特征匹配算法
物体识别中的特征基于SIFT特征提取描述匹配
多量性,即使少数的几个物体也可以产生大量 SIF T 特征向量。
可扩展性,可以很方便的与其他形式的特征向量进行联合。
第7页/共39页
例如旋转不变性
Original image courtesy of David Lowe
Octave 3
…
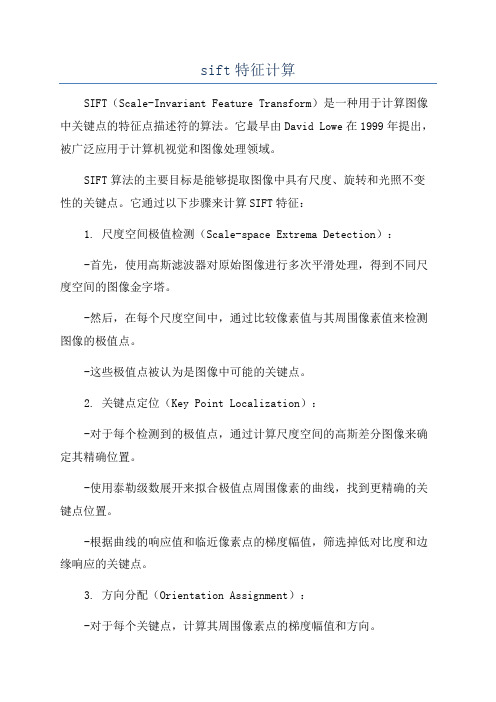
为了让尺度体现其连续性,在简单
2
Octave 2
…
降采样的基础上加上了高斯滤波。
一幅图像可以产生几组(octave)
图像,一组图像包括几层
Octave 1
( i n t e r va l ) 图 像 。
…
第18页/共39页
17
关键点检测相关问题
…
高斯图像金字塔共o组、s层,
则有:
X
D
X 2
2
1
D
X
2. 再求出当前关键点到精确到 的最大偏移量后,若其值
大于0.5则表示极值点更靠近相邻的点,将关键点换成
相邻的点,重复前两步。
3. 若小于0.5则不动。
第25页/共39页
24
去除低对比度极值点:
• 在精确定位好后。通过上面求得的精确点,计算精确极值,
计算公式如下:
x y
L x 1, y L x 1, y L x, y 1 L x, y 1
梯度幅值:
m x, y
梯度方向:
L x, y 1 L x, y 1
x, y tan
• 2 =
• 利用差分近似代替微分,则有:
基于SIFT的图像匹配算法
收 稿 日期 :0 9 1-5 2 0 .1 0
基金项 目: 国家中小企业创新基 金资助项 目( 9 2 22 2 2 3 0 C 6 2 134 ) 作者简介 : 世杰 (9 9一) 男 , 贾 16 , 副教授 , 士研究生 , 博 主要从事 网络 与多媒 体信息处理 的研究
E mal is ie d . n — i: ah i j j @ 1c .
库 ቤተ መጻሕፍቲ ባይዱ 进 行 快 速 、 确 的 匹配 . 准
关键词 : 图像 匹配 ;IT; SF 特征检测 ; 特征描述
文献标识码 : A
0 引言
图像 匹 配是指 同一场 景 在两 个不 同视 点 下 的
进 行实 验 和研究 讨 论 . 二 部分 分 析 SF 特 征 提 第 I T
取 方法 , 三 部 分 将 使 用 SF 第 IT进 行 图像 匹 配 实 验, 并对 实 验结果 进 行分 析 讨论 .
L , , ) ( Yo r
变特 征变 换 ) 征 匹 配 算 法 为 代 表 .I 是 一 种 特 SF T
提取 局部 特征 的算 法 , 尺度 空 间寻找 极值 点 , 在 提
D( Y O)= [ ( , ,o]一G( Y o) , , r G PYk C r , , ]× r
() 3
随 着数 字 图像技 术 和计 算 机技 术 的发 展 , 现 了 出
基 于特 征 的 图像 匹 配技 术 . 于特征 的图像 匹 基
配技 术 根据 匹 配 目标 的需 要 进 行 特 征 的组 合 、 变
换, 以形 成 易 于 匹 配 、 定 性 好 的 特征 向量 , 而 稳 从
图像 ,PY , ( ,) 在不 同尺度空间下用 L p) o C ( ,, )表 c ,r 示 G usa asin图像 . D( Yo)来 表 示 相邻 两 尺 用 ,,r
图像特征点提取及匹配算法研究论文
图像特征点提取及匹配算法研究论文1.SIFT算法:SIFT(Scale-Invariant Feature Transform)算法是一种经典的图像特征点提取算法。
该算法首先使用高斯滤波器对图像进行多尺度的平滑处理,然后使用差分算子来检测图像中的关键点,最后计算关键点的主方向和描述符。
SIFT算法具有尺度不变性和旋转不变性,对于图像中存在较大尺度和角度变化的情况下仍能提取出稳定的特征点。
2.SURF算法:SURF(Speeded Up Robust Features)算法是一种快速的特征点提取算法,它在SIFT算法的基础上进行了优化。
SURF算法使用Haar小波响应来检测图像中的特征点,并使用积分图像来加速计算过程。
此外,SURF算法还使用了一种基于方向直方图的特征描述方法,能够提取出具有旋转不变性和尺度不变性的特征点。
3.ORB算法:ORB(Oriented FAST and Rotated BRIEF)算法是一种快速的特征点提取和匹配算法。
该算法结合了FAST角点检测算法和BRIEF描述符算法,并对其进行了改进。
ORB算法利用灰度值的转折点来检测图像中的角点,并使用二进制字符串来描述关键点,以提高特征点的匹配速度。
ORB算法具有较快的计算速度和较高的匹配精度,适用于实时应用。
4.BRISK算法:BRISK(Binary Robust Invariant Scalable Keypoints)算法是一种基于二进制描述符的特征点提取和匹配算法。
该算法首先使用田字形格点采样方法检测关键点,然后使用直方图来描述关键点的方向和纹理特征。
最后,BRISK算法使用二进制字符串来表示关键点的描述符,并使用汉明距离来进行特征点的匹配。
BRISK算法具有较快的计算速度和较高的鲁棒性,适用于大规模图像匹配任务。
总结起来,图像特征点提取及匹配算法是计算机视觉领域中的重要研究方向。
本文介绍了一些常用的特征点提取及匹配算法,并对其进行了讨论。
SIFT特征匹配技术讲义
SIFT特征匹配技术讲义1导言:SIFT特征匹配算法是目前国内外特征点匹配研究领域的热点与难点,其匹配能力较强,可以处理两幅图像之间发生平移、旋转、仿射变换情况下的匹配问题,甚至在某种程度上对任意角度拍摄的图像也具备较为稳定的特征匹配能力。
该算法目前外文资料较多,但中文方面的介绍较少。
为此我撰写了这篇文档,以帮助国内的研究学者尽快入门,以最快的速度去体验SIFT算法的魅力!作者:山东大学信息科学与工程学院赵辉bugzhao@ / 5.1 宽基线特征匹配概述宽基线条件下点特征匹配的首要任务就是提取稳定的特征,并进行描述。
这里稳定一词的含义指的是希望该特征能对旋转、尺度缩放、仿射变换、视角变化、光照变化等图像变化因素保持一定的不变性,而对物体运动、遮挡、噪声等因素也保持较好的可匹配性,从而可以实现差异较大的两幅图像之间特征的匹配。
对图像变化保持稳定的特征描述符称为不变量,比如对图像的旋转保持稳定的不变量称为旋转不变量(Rotation Invariant),对尺度缩放保持稳定的不变量则称为尺度不变量(Scale Invariant)。
特征描述符(Featrue Descriptors)指的是检测图像的局部特征(比如边缘、角点、轮廓等),然后根据匹配目标的需要进行特征的组合、变换,以形成易于匹配、稳定性好的特征向量,从而把图像匹配问题转化为特征的匹配问题,进而将特征的匹配问题转化为特征空间特征向量的聚类问题[51]。
宽基线条件下的点特征匹配一般包括下面四个步骤[30]:1.)特征点检测。
这些特征点一般是灰度变化的局部极值点,含有显著的结构性信息,甚至这些点也可以没有实际的直观视觉意义,但却在某种角度、某个尺度上含有丰富的易于匹配的信息。
2.)特征点描述,即建立特征向量。
这是各匹配算法主要的不同所在。
特征空间的选择决定了图像的哪些特性参与匹配,哪些特性将被忽略。
特征点的特征描述符应是不变量,以确保最低限度的受摄像机的运动或光照变化等因素的影响。
sift特征计算
sift特征计算SIFT(Scale-Invariant Feature Transform)是一种用于计算图像中关键点的特征点描述符的算法。
它最早由David Lowe在1999年提出,被广泛应用于计算机视觉和图像处理领域。
SIFT算法的主要目标是能够提取图像中具有尺度、旋转和光照不变性的关键点。
它通过以下步骤来计算SIFT特征:1. 尺度空间极值检测(Scale-space Extrema Detection):-首先,使用高斯滤波器对原始图像进行多次平滑处理,得到不同尺度空间的图像金字塔。
-然后,在每个尺度空间中,通过比较像素值与其周围像素值来检测图像的极值点。
-这些极值点被认为是图像中可能的关键点。
2. 关键点定位(Key Point Localization):-对于每个检测到的极值点,通过计算尺度空间的高斯差分图像来确定其精确位置。
-使用泰勒级数展开来拟合极值点周围像素的曲线,找到更精确的关键点位置。
-根据曲线的响应值和临近像素点的梯度幅值,筛选掉低对比度和边缘响应的关键点。
3. 方向分配(Orientation Assignment):-对于每个关键点,计算其周围像素点的梯度幅值和方向。
-将周围像素点的梯度方向分布转换为直方图,并找到主导方向。
-在主导方向和周围方向上进行插值,获得关键点的特征方向。
4. 关键点描述(Descriptor Representation):-在关键点周围的邻域内,根据关键点的尺度和方向构建一个相对于尺度和旋转不变的描述子。
-将关键点周围的图像区域划分为若干个子区域,并计算每个子区域内像素的梯度方向和幅值。
-将梯度方向转换为16个方向的直方图,得到长度为128的特征向量。
-对特征向量进行归一化,去除光照变化的影响。
5. 特征匹配(Feature Matching):-使用特征点的描述子来计算两幅图像中的特征点之间的距离。
-对于每个特征点,选择与其特征向量距离最近的特征点作为匹配点。
基于GPU的SIFT特征匹配算法并行处理研究
到1 O倍 以上 的加 速 比 。
关 键 词 GP U, S I F T , C I A, 特 征 匹配 中图法分类号 T P 文献标识码 A
P a r a l l e l Pr o c e s s i n g Re s e a r c h o n S I Ft F e a t u r e Ma t c h i n g Al g o r i t h m Ba s e d o n GP U
计
算
机
科
学
V o t . 4 O No . 1 2
De c 2 0 1 3
Co mp u t e r S c i e n c e
基 于 GP U的 S I F T特 征 匹配 算 法 并 行 处 理 研 究
姜 超 耿则 勋 娄 博L 魏小 峰 沈 忱
( 解放 军信 息 工程 大学 郑 州 4 5 0 0 5 2பைடு நூலகம்) ( 6 9 0 2 8部 队 乌鲁 木齐 8 3 0 0 0 6 ) 。
摘 要 S I F T 算法因具有 旋转 、 缩放 以及 平移不变性 而在影像 配准和基于影像的三 维重 建领域得到 广泛应用 。但该
算法复杂度较 高, 在C P U上执行 的效 率不 高, 难 以满足对 实时性要 求较 高的应 用。在 深入 分析 S I F T算法原 理的基
础上 , 针 对该 算法提 取特征的 多量性和特征 向量的高维性 , 将 该算 法进 行 了并行 化改造 以利用 GP U 强 大的并行计 算 能力 , 并与 C P U上 实现 的 S 算 法进行 了比较 。 实验证 明, 基 于 GP U的 S I F T算法执行 效率 大幅提升 , 平均可 以达
基于SIFT特征点匹配校正的抗几何攻击水印算法

1
引 言
作 为 版权 保护 的有 效 手 段 ,数 字 水 印 在 使 用过 程 中必 须 能 够 对 各 种 攻击 具有 较 强 的鲁 棒 性 。 已有
的 大 多 数 算 法 都 可 以有 效抵 抗 加 噪 、滤 波 、J P E G压缩 等 常 规 攻 击 ,而 对 于 剪 切 、平 移 、缩放 、旋 转 等
第1 8卷 第 2期 2 0 1 3 年 4月
文 章 编 号 :1 0 0 7 - 0 2 4 9( 2 0 1 3 ) 0 2 - 0 1 5 8 — 0 8
电路 与 系 统 学 报
J 0URNAL 0F CI RC UI TS AND S YS T EM S
VO 1 . 18 N O. 2 Ap r i l , 201 3
现 有 的抗 几 何 攻 击 的水 印 算 法 大致 可 以分 为 三 类 :一 是 在对 几 何攻 击 具 有 不 变 性 的域 中 嵌 入 水 印
[ 1 -3 ] ,
如 奇 异 值 分 解 、F o u r i e r — Me l l i n变 换 域 、基 于 矩 的 图像 归一 化 区域 、Z e r n i k e矩 等 ;二 是 嵌 入 水 印
制 ( DC QI M )[ 引。通 过量 化 技 术 把 水 印信 息 嵌 入 的 算法 实 现简 单 ,可 以有 效抵 抗 低 噪 声干 扰 ,其 最 大 的优 点在 于可 以实 现 盲 提 取 。 Go r o d e t s k d 等 人【 ] 通 过 量 化 各 子 块 奇 异 值 向 量 的 欧 氏范 数 修 改 各 子 块 的所 有 奇 异 值 来 实现 水 印 的嵌 入 。但 是 基 于 量 化 的 方法 不 能有 效 抵 抗 几 何 攻 击 。
基于改进SIFT特征和图转换匹配的图像匹配算法
确 匹配。 实验 对 比结果 表 明 , 用取得 稳定 的特 征点 , 进 而结合 一种好 的 匹配 策略 , 能够 更加 增 强 图像 匹配 的高 效
Z HA N G G u a n - l i a n g ’ , Z O U Hu a n — x i n , Q I N X i a n — x i a n g ,L I N X i a o — p i n g
( 1 . C o l l e g e o fE l e c t r o n i c S c i e n c e& E n g i n e e r i n g,N a t i o n a l U n i v e r s i t y o f D e f e me T e c h n o l o g y ,C h a n g s h a 4 1 0 0 7 3 ,C h i n a ; 2 .D e p t .o f U r u m q i
C o mm a n d C o l l e g e fA o r m e d P o l i c e ,U r u m q i 8 3 0 0 4 9, C h i n a )
Ab s t r a c t :As t h e S I FF o p e r a t o r mi g h t e x t r a c t mo r e f a l s e k e y p o i n t s i n t h e i ma g e w i t h v a i r o u s t e x t u r e ,wh i c h wo u l d a f f e c t t h e r e s u l t o f i ma g e ma t c h i n g,t h i s p a p e r p r o p o s e d a n e w a l g o r i t h m o f i ma g e ma t c h i n g b a s e d O 1 3 . S I F T l o c a l i n v a r i a n t f e a t u r e o f Ha r — r i s t h r e s h o l d c r i t e i r o n .On t h e b a s i s o f e x t r a c t i n g S I T F i n v a r i a n t f e a t u r e s ,t h e e x t r a c t e d i n v a r i a n t f e a t u r e w a s s e l e c t e d b a s e d o n Ha r r i s t h r e s h o l d c i r t e i r o n .T h e r e f o r e ,t h e r e l e a v e d s o me mo r e r o b u s t a n d w e l l s e p a r a b l e f e a t u r e s b e c a u s e t h e wo r s e s e p a r a b l e