水下三分量磁力梯度答辩
第四章 第一节高精度磁法

第一节 高精度磁法
磁法勘探是一门较老、较系统的地球物理方法,广泛用于 地质找矿等领域。随着仪器测量精度、正反演数据处理精度的 提高,高精度磁测成为可能,它广泛用于弱磁问题,如环境调 查、灾害预报工作。环境与工程地球物理中要求磁法有较高的 精度,其探测目标更着重于浅层,甚至地表十米之内,主要研 究地下管道、电缆的深度、固体垃圾的污染等问题,公路、铁 路的走线和敷设,水库、水电站坝址的勘测等。另外,环境与 工程地球物理中的磁法,不只是磁场强度的测定,更重要的是 磁性测定。如磁化率的测定在土壤磁学、古地磁研究、城市大 气污染的调查、河流和海洋污染的研究、热电厂粉煤灰的研究 上都有着重要的作用。
野外测量的探头有两种类型:一种探头的传感器做成环形,直径近 20cm,有点像探雷器,探测时需接触地面,有效探测深度约10cm; 另一种探头的端部为尖形,直径1、5cm,必须与探测目标直接接触 ,或用钻头在表土上钻一小孔,把探头插入孔中测量。
第一节 高精度磁法
想要测量地表以下更深一点地方介质的磁化率,就需使用另一种野外 磁化率测量仪器,它是由发射器、接收器、电子仪器和控制系统组成的 。发射器和接收器分别装在水平横杆的两端,它们的中间是电子仪器和 控制系统。发射器发射的变化磁场(一次磁场)在地下介质中产生电流, 而电流反过来又产生磁场(二次磁场),并为接收器所接收,由此可得磁 场的虚、实分量。所谓某磁场分量的虚分量是指该分量与一次磁场相位 相差90°时的那部分磁场的振幅,而与一次磁场同相的那部分磁场的振 幅,叫做实分量,所以前者又称为异相分量,后者又称为同相分量。这 种仪器在低频 (4kHz左右) 工作时,测量实分量,可求得介质的磁化率 ,而在高频 (40kHz左右) 工作时,测量虚分量,可求得介质的电导率 。横杆的长度可以变化,亦即改变发射器与接收器之间的距离,相应地 也就改变了探测的深度。
微机磁力仪三分量磁测在铁矿勘探巷道中的应用——以龙岩新山铁矿为例
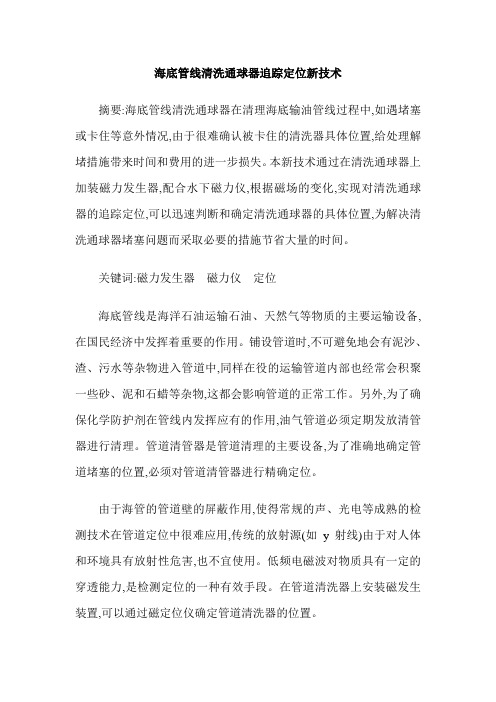
道 三分 量磁 测前 应 收集相 应勘 探 阶段 已有 的地 质 资料 、地 面磁 测 图等,以便 熟 习并掌握 工作 区的地质 情况, 特别 是工 作区磁性 差异较 小的地 质体如 磁铁矿 体 、基性 和 超基 性 岩 体等 的 产状 和 大致 分 布情 况 。 以便 在 矢量 图解译 时 能 准 确推 断 是 矿致 异 常 还 是非 矿 致异 常 。 测量 资料 的收 集主 要 是巷道 的 工程 图 。通 过工 程 图, 以知道 每段 巷道 可
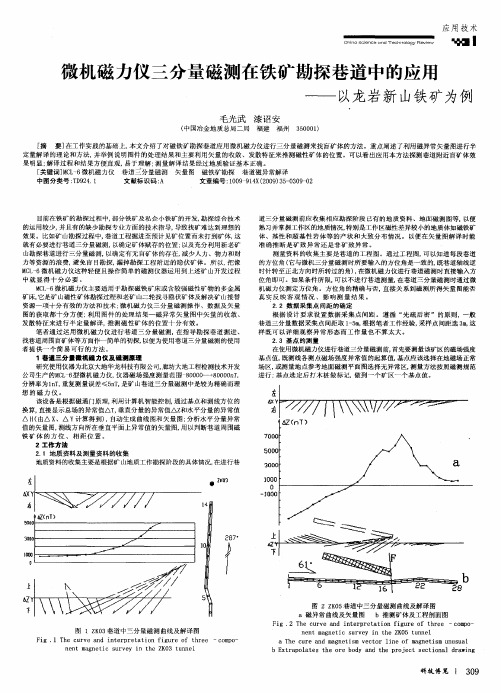
目前在 铁矿 的勘 探过 程中, 部分 铁矿 及私 企小 铁矿 的开发, 勘探 综合 技术 的运用 较少 , 并且有 的缺少 勘探 专业 方面 的技 术指 导, 导致找 矿难 达到 理想 的 效 果 。比如矿 山勘探 过程 中, 道工程 掘进 至预 计见 矿位 置而 未打 到矿体 , 巷 这 就有必 要进行 巷 道三分 量磁 测, 以确 定矿 体赋存 的位 置 : 以及 充分 利用 新老矿 山勘探 巷道进 行 三分量 磁测 , 以确 定有无 盲矿 体 的存在 , 少人 力 、物 力和 财 减 力 等资源 的浪费 , 免盲 目勘探 , 避 漏掉 勘探 工程 附近 的隐伏 矿 体 。所 以, 把像 M L 6 机磁 力仪 这种 轻便 且操 作简 单的磁 测 仪器运 用 到上述 矿 山开发 过程 C一 微 中就 显 得 十 分 必 要 。 M L 6 机 磁力仪 主要 适用 于勘 探磁铁 矿 床或 含较 强磁 性矿物 的 多金属 C一 微 矿床 , 它是矿 山磁性 矿体勘探 过程 和老矿 山二轮 找寻 隐伏矿 体及解 决矿 山接替 资源 一 项十 分有 效 的方法 和技 术 : 微机 磁 力仪 三分 量磁 测操 作 、数据 及 矢量 图的获 取 都十 分方 便 : 利用 图件 的处理 结 果一 磁 异 常矢 量 图 中矢量 的收敛 、 发 散特 征来 进 行半 定量 解 译, 推测 磁 性矿 体 的位 置 十 分有 效 。 笔者通 过 运 用微 机 磁力 仪 进行 巷 道三 分 量磁 测, 指导 勘探 巷 道 掘进 、 在 找巷 道周 围盲 矿体 等方面 作一简 单 的初 探, 以便 为使用 巷道三 分量磁测 的使 用 者 提 供一 个 简 易 可行 的方 法 。 1巷道 三 分量 徽机 磁 力仪及 磁测 原理 研究使用 仪器为 北京大 地华龙 科技有 限公 司, 坊大地 工程检 测技术 开发 廊 公 司生产 的M L 6 C 型微机 磁 力仪, 仪器磁 场 强度测 量范 围 8 00 + 0 0n , 0 0- 80 0 T 分辨 率为 lT 重复测 量误 差≤5 T 是矿 山巷道 三分量 磁 测中 是较 为精 确 而理 n, n, 想的磁 力仪 。
海底管线清洗通球器追踪定位新技术
海底管线清洗通球器追踪定位新技术摘要:海底管线清洗通球器在清理海底输油管线过程中,如遇堵塞或卡住等意外情况,由于很难确认被卡住的清洗器具体位置,给处理解堵措施带来时间和费用的进一步损失。
本新技术通过在清洗通球器上加装磁力发生器,配合水下磁力仪,根据磁场的变化,实现对清洗通球器的追踪定位,可以迅速判断和确定清洗通球器的具体位置,为解决清洗通球器堵塞问题而采取必要的措施节省大量的时间。
关键词:磁力发生器磁力仪定位海底管线是海洋石油运输石油、天然气等物质的主要运输设备,在国民经济中发挥着重要的作用。
铺设管道时,不可避免地会有泥沙、渣、污水等杂物进入管道中,同样在役的运输管道内部也经常会积聚一些砂、泥和石蜡等杂物,这都会影响管道的正常工作。
另外,为了确保化学防护剂在管线内发挥应有的作用,油气管道必须定期发放清管器进行清理。
管道清管器是管道清理的主要设备,为了准确地确定管道堵塞的位置,必须对管道清管器进行精确定位。
由于海管的管道壁的屏蔽作用,使得常规的声、光电等成熟的检测技术在管道定位中很难应用,传统的放射源(如y射线)由于对人体和环境具有放射性危害,也不宜使用。
低频电磁波对物质具有一定的穿透能力,是检测定位的一种有效手段。
在管道清洗器上安装磁发生装置,可以通过磁定位仪确定管道清洗器的位置。
1 磁通门的结构及工作原理磁通门传感器就是利用某些高磁导率的软磁材料(如坡莫合金)作磁芯,以其一起在交流磁场作用下的次饱和特性及法拉第电磁感应原理研制成的测磁装置。
其结构可以看成一个特殊的变压器,磁通门测磁法正是利用这种特殊变压器的磁芯,当交变电流流过该变压器原边线圈时,磁芯反复被交变过饱和励磁所磁化,当有外磁场存在时,励磁变得不对称,变压器的输出信号受到外磁场的调制。
通过检测输出的调制信号就可以实现对外磁场的测量。
磁通门探头的输出主要是激励信号的二次谐波,需要经过处理得到测量数据。
跑道型磁芯的长轴场边尺寸远大于短轴尺寸,因此,认为跑道型磁芯仅被延长轴方向的磁场所磁化。
磁力仪用途的介绍
---------------------------------------------------------------最新资料推荐------------------------------------------------------磁力仪用途的介绍磁力仪用途的介绍磁力仪就是通过磁敏传感器测量磁场并记录的一种磁法勘测设备。
磁敏传感器是对磁场敏感的元器件,具有把磁学物理量转换为电信号的功能。
它在地学领域中主要是用来测量地磁参量,供地球物理研究和找矿勘探使用。
目前,常用与地学领域中的磁敏传感器主要有质子旋进式磁敏传感器,光泵式磁敏传感器, SQUID(超导量子干涉器)磁敏传感器,磁通门式磁敏传感器,感应式磁敏传感器,半导体磁敏传感器,机械式磁敏传感器等。
应用不同的磁敏传感器所制造出来的磁力仪也分很多种,目前市场上应用比较广的主要有这么 3 种:1. 三分量磁力仪:它是应用磁通门式磁敏传感器研制的,这种磁力仪能够检测 3 个磁场分量和总磁场值,它既可以完成地面的磁法测量,也可以采集矿井下的磁法数据,测量结果精确,但其测量速度较慢,工作效率不高,一般应用在一些复杂的磁场勘探中,如磁偏角,磁倾角的测量,野外找矿一般较少用到。
2. 质子磁力仪:质子旋进式磁敏传感器是利用质子在地磁场中的旋进现象,根1/ 6据磁共振原理研制成功的,用这种传感器制作的测磁仪器,在国内外均得到广泛应用。
由于其轻巧耐用,操作简单方便,工作效率高,测量精度高,稳定性好。
在野外探矿所表现出的优越的性能,所以各种功能的质子磁力仪应运而生,质子梯度磁力仪,高精度质子磁力仪,甚低频磁力仪,步行磁力仪等应用到找矿的各个领域,是地质工作者最好的找矿帮手。
3. 光泵磁力仪:应用光泵式磁敏传感器研制的磁力仪叫做光泵磁力仪,目前光泵磁力仪是最先进的磁法探测设备,已经应用到陆地,航空,海洋等各个领域,其测量精度极高,稳定性极强,是磁法科研的最佳工具。
一种基于磁法探测的水下电缆探测误差修正技术探讨
工 程 技 术88科技资讯 SCIENCE & TECHNOLOGY INFORMATION①作者简介:崔志伟(1986—),男,山东青州人,本科,工程师,主要从事海底地形及海洋环境调查、管线电缆调查等工作。
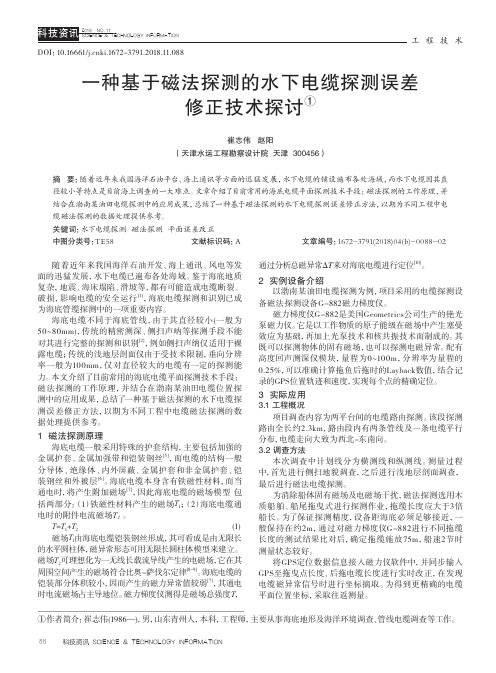
DOI:10.16661/ki.1672-3791.2018.11.088一种基于磁法探测的水下电缆探测误差修正技术探讨①崔志伟 赵阳(天津水运工程勘察设计院 天津 300456)摘 要:随着近年来我国海洋石油平台、海上通讯等方面的迅猛发展,水下电缆的铺设遍布各处海域,而水下电缆因其直径较小等特点是目前海上调查的一大难点。
文章介绍了目前常用的海底电缆平面探测技术手段:磁法探测的工作原理,并结合在渤南某油田电缆探测中的应用成果,总结了一种基于磁法探测的水下电缆探测误差修正方法,以期为不同工程中电缆磁法探测的数据处理提供参考。
关键词:水下电缆探测 磁法探测 平面误差改正中图分类号:TE58 文献标识码:A 文章编号:1672-3791(2018)04(b)-0088-02随着近年来我国海洋石油开发、海上通讯、风电等发面的迅猛发展,水下电缆已遍布各处海域。
鉴于海底地质复杂,地震、海床塌陷、滑坡等,都有可能造成电缆断裂、破损,影响电缆的安全运行[1],海底电缆探测和识别已成为海底管缆探测中的一项重要内容。
海底电缆不同于海底管线,由于其直径较小(一般为50~80mm),传统的精密测深、侧扫声呐等探测手段不能对其进行完整的探测和识别[2],例如侧扫声纳仅适用于裸露电缆;传统的浅地层剖面仪由于受技术限制,垂向分辨率一般为100mm,仅对直径较大的电缆有一定的探测能力。
本文介绍了目前常用的海底电缆平面探测技术手段:磁法探测的工作原理,并结合在渤南某油田电缆位置探测中的应用成果,总结了一种基于磁法探测的水下电缆探测误差修正方法,以期为不同工程中电缆磁法探测的数据处理提供参考。
1 磁法探测原理海底电缆一般采用特殊的护套结构,主要包括加强的金属护套、金属加强带和铠装钢丝[5],而电缆的结构一般分导体、绝缘体、内外屏蔽、金属护套和非金属护套、铠装钢丝和外被层[6]。
水下物理场总结

水下物理场总结第一部分 场论及数理方程基础 场的定义:若对全空间或其中某一区域 V 中每一点 M ,都有一个标量 (或矢量) 与之对应, 则称在 V 上给定了一个标量场 (或矢量场)。
梯度:梯度是由数量函数(,,)u x y z 所定义的向量函数。
散度:设(,,)(,,)i (,,)j (,,)k A x y z P x y z Q x y z R x y z =++为 V上的一个向量场. 称如下数量函数(,,)P Q RD x y z x y z ∂∂∂=++∂∂∂ 为A的散度。
记作div .P Q RA x y z ∂∂∂=++∂∂∂旋度:设(,,)(,,)i (,,)j (,,)k A x y z P x y z Q x y z R x y z =++为V 上的一个向量场. 称如下向量函数 (,,)i +j +k R Q P R Q P F x y z y z z x x y ⎛⎫⎛⎫∂∂∂∂∂∂⎛⎫=--- ⎪ ⎪ ⎪∂∂∂∂∂∂⎝⎭⎝⎭⎝⎭ 为 的旋度。
记做r o t i +j RQ P R QA yz zx x⎛⎫⎛∂∂∂∂∂⎛⎫=---⎪ ⎪ ∂∂∂∂∂⎝⎭⎝⎭⎝“源” :若0div ()0,A M >说明在每一单位时间内有一定数量的流体流出这一点, 则称这一点M 0 为 “源”“汇” :若 0d i v()0,A M < 说明在每一单位时间内有一定数量的流体流入这一点, 则称这一点M 0 为 “汇”。
第二部分舰船磁场及海洋环境磁场1.地磁场的组成,与地球位置的关系;2.地球偶极子磁场的全球分布规律;3.地磁要素有哪些?地磁坐标系及相应关系4.常见的地磁图有哪几种?5.什么叫太阳日变?简述太阳日变的信号特征及随纬度和季节变化的规律。
6.常见的干扰变化磁场有哪几类?简述地磁脉动干扰的信号特征。
7.什么叫K指数,它是如何规定的?8.什么叫磁暴?发生磁暴时地磁变化场有何特征?9.舰船在地磁场中磁化的特点。
两点磁梯度张量定位方法
两点磁梯度张量定位方法戴忠华;周穗华;单珊【摘要】In the process of magnetic positioning with magnetic gradient tensor,geomagnetism will lead to posi-tioning failure.A two-point magnetic gradient tensor localization method was proposed.based on the principle of single point magnetic tensor gradient localization.A two-point magnetic gradient tensor nonlinear equation was constructed by using the continuous two-point magnetic gradient tensor of motion vector measurement system and the magnetic dipole model equation.A hybrid optimization algorithm combining the single point positioning algorithm and the classical POWELL algorithm were used to determine the optimal position parameter of the ob-jective function.Simulation results showed that the proposed method had high positioning accuracy and is less affected by geomagnetism than the original single-point magnetic gradient localization method.%针对单点磁梯度张量定位方法存在的受地磁影响较大,且定位存在多解性的问题,提出两点磁梯度张量定位方法.该方法基于单点磁张量梯度定位原理,利用运动载体测量系统的连续两点磁梯度张量,结合磁偶极子模型方程,构建两点磁梯度张量非线性目标函数,采用单点定位和 POWELL混合优化算法对位置参数进行求解.仿真结果表明,在有地磁干扰的情况下,所提方法与原单点磁梯度定位方法相比受地磁影响小,定位精度较高,测量系统基线大小和磁力仪精度是影响远距离定位精度的主要因素.【期刊名称】《探测与控制学报》【年(卷),期】2018(040)001【总页数】5页(P44-48)【关键词】磁定位;磁梯度张量;目标函数;混合优化算法;【作者】戴忠华;周穗华;单珊【作者单位】海军工程大学兵器工程系,湖北武汉430033;海军工程大学兵器工程系,湖北武汉430033;海军工程大学兵器工程系,湖北武汉430033【正文语种】中文【中图分类】TP212.130 引言铁磁体在地球磁场的磁化作用下,会在其周围产生一个附加磁场,该磁场常常作为磁性目标探测、定位和识别的信号源[1-3]。
磁场梯度测量及重磁联合解释与应用
磁场梯度测量及重磁联合解释与应用近二十余年来,磁测技十发展十分迅速,出现了高精度的光泵磁力仪和超导磁力仪,为开展磁场梯度测量打下了物质基础。
在某些地质条件下,磁场梯度测量有可能解决一般磁测难于解决的复杂问题,可以查明场源的更多特点和细节。
标签:超导磁力仪磁场梯度重磁异常等1概述磁场梯度测量:测量磁场在空间的变化率(单位为纳特/米或纳特/千米)称为磁场梯度测量,在生产实际中应用的有垂直梯度测量与水平梯度测量两种。
垂直梯度测量的接收部分为两个垂直安置的探头。
如果在飞机上测量,探头的垂直距离可以设计得较大,约30~60米,测量仪器一般选用极高灵敏度的光泵磁力仪,两个探头同时读数。
如果在地表测量,探头的垂直距离约为2米,测量仪器以核子旋进磁力仪为主。
在地表测量中,为了克服两个探头激发时产生的磁场相互干扰,常采用上、下两个探头分两次激发读数,间隔为2秒。
用两个探头读数值除以探头间距离即为该点上的垂直梯度。
局部磁异常的垂直梯度变化比区域异常的明显,故垂直梯度测量适合于在具有强区域干扰地区实施,以便获得有用的局部异常的信息。
水平梯度测量常见于海上,接收部分同样是两个探头,但为水平放置。
同时记录两个探头的读数,其瞬时差就是水平梯度。
2重磁联合反演的应用磁力勘探是发展最早,应用广泛的一种地球物理勘探方法,也是最为经济,快捷的方法之一。
早在两千多年以前,我们的祖先就知道并利用了天然磁石的吸铁性和指极性。
中国古代的四大发明之一的指南针传入欧洲后,人们开始关注地磁现象,并开始应用磁力探测仪器来寻找铁矿。
随着现代科学技术的进步,磁力勘探仪器已从机械式发展到电子式,磁力勘探的范围也逐渐扩展到空中、海洋。
在上世纪60年代发展起来的高灵敏度磁力传感器,使得人们能够快速、准确地测量地磁总场的幅值。
在地球物理工作中根据利用的不同类型的物性差异课将具体方法分为重磁电震等,重磁是位场属于同源场,往往利用单一方法进行探测工作时会因为问题的复杂性而无法得到较好的解,因此采用重磁这两种同源场,同时联合处理反演会得到较好的结果,而且他们都是位场,联合反演的结果也更趋向于真实。
水下攀爬式机器人毕业设计答辩
机械臂C的位移曲线图1
机械臂C的张弛位移曲线图2
中国海洋大学工程学院
4 设计总结
大直径立式水下管道外壁爬行机器人是水下管道 爬行机器人的一员,对它的设计、探索有利于水下 爬管机器人的设计和研究。
这次设计也让我认识到了团队的重要性,感谢陆 建辉老师,杨雷学长等对这次毕设提供的宝贵帮助。
中国海洋大学工程学院
中国海洋大学工程学院
1.2 设计目标
1.2.1功能目标 1)能在直径为15000mm的管道上爬行; 2)可翻越高度为100mm的焊接环; 3)能实现机器人的往返及暂停。 1.2.2具体功能参数如下:
中国海洋大学工程学院
2 设计路线
夹紧和越
障功能
{ 设计要 传动功能 求
三维 模型
返回停止功能
运动 零件分析校
谢谢老师们对本次设计的指导 !
水下攀爬式机器人
设计汇报答辩
工程学院
汇报内容1. 意义与目来自 2. 设计过程 3. 设计内容 4. 设计总结
中国海洋大学工程学院
1.1 设计意义
1 携带相应设备进行立式水下在役管道的检测; 2 弥补管内爬行机器人携带的工作设备较小,无法实现对管道 外的维修等诸多不足; 2 在国内水下管道外壁爬行机器人研究非常稀少的情况下,该 机器人的设计具有很强的创新性,课题创新、原理创新、功能 创新。
2.2 原理
爬行机器人原理图
中国海洋大学工程学院
2.3 三维总装图
三维装配图
中国海洋大学工程学院
3 运动仿真分析
将下肢B固定的运动仿真
1)机械夹紧 装置
2)曲柄连杆机 构
将上肢A固定的运动仿真
中国海洋大学工程学院
运动仿真曲线
重力梯度仪在水下安全航行中的应用
1 引 言 重力梯 度仪 的研 制可 以追 溯到 19 8 0年 , 牙利 匈 的物 理 学 家 E t s设 计 了第 一 台重 力 梯 度 仪 ( 6v 6 扭 称 ) 由于在 水平 扭转 方 向灵 敏度 高 , 主要 用 来 测 , 它 量水平 方 向 的重 力梯 度 分 量 , 而 开 创 了重 力 梯 度 从 测量 的新纪 元 ¨ 。到 了 2 0世 纪 7 0年 代 以后 , 重力 梯 度仪 得到 了飞速 的发 展 , 国 、 国等 国家先 后研 美 法
海
洋
测
绘
第3 0卷
式( ) 1 所描述 的量 , 地球外 部满 足 : 在
3
的定 积分 得到二 重 积 分 表达 式 , 后 注 意 到该 二 重 之
A =∑ = 和 = V 0
=1
() 2
积分 的 积分 区域 为 半 圆域 : ≤t, Y+ ≥0 此 时 引 , 入极 坐标 进行 变 换 Y to0 z t n , = cs , = s 0 积分 范 围相 应 i
前的提高 。区别 以往 的方 法 , 文 提 出利 用 重 力 本
如 图 1所示 重力 梯度 仪 由对称 地布置 在 三轴正
交 的 6个 加速度 计 组 成 , 一 对 重力 仪 问 的 距离 是 每 精密测 定 的 , 测 时 通过 轴 上 的一 对 重力 仪 可 以敏 观 感该方 向上重 力在臂长距离 上 的微小 变化 , 变化量 该 与臂长 的比值 即为该方 向上 的梯度值 , 对于全 张量 的
( .海军工程大学 导航工程系 , 1 湖北 武 汉 4 0 3 ; .海军 司令部 航海保证部 , 30 3 2 天津
350 ) 12 0
304 ; 00 2