【北京工业大学821自动控制原理】真题精讲
【北京工业大学821自动控制原理】真题精讲
【北京工业大学821自动控制原理】真题精讲北京工业大学821 自动控制原理目录目录 (1)1.1 真题分析 (2)1.2 真题剖析 (3)1.2.1 2016 年真题 (3)1.3 真题剖析要点总结. (16)1.3.1 常考知识点总结 (16)1.4 2016 年真题 (18)通过真题的学习和掌握,可以帮助学生把握考试重点。
每年的考点在历年试题中几乎都有重复率,因此,通过对历年真题的把握,可以掌握今年考试的重点。
另外,可以通过对历年真题的学习,把握出题者的思路及方法。
每种考试都有自己的一种固定的模式和结构,而这种模式和结构,通过认真揣摩历年真题,可以找到命题规律和学习规律。
因此,本部分就真题进行详细剖析,以便考生掌握命题规律、知悉命题的重点、难点、高频考点,帮助考生迅速搭建该学科考试的侧重点和命题规则。
1.1 真题分析综合来说,自动控制原理专业课这几年的题型变化不大,主要是计算题型,难度略有增加,侧重于对基础知识点的掌握以及对知识的灵活运用。
在复习时,对于了解的知识点,复习的时候,只需要知道概念性的定义即可,简单的看一下推导的过程或背景知识即可,有助于对相关内容的理解,不要求重点掌握,例如我们课本的第一章,就是一个引言部分,引入自动控制以及自动控制系统的概念;对于熟悉的知识点,复习的时候,应着重把握,理解公式的定义及相应公式的推导和求取、系统稳定的条件、判稳的方法、由稳定条件求取相应指标参数、折线图的绘制步骤、校正的步骤、相平面法和传递函数法、z 变换法及判断系统稳定性等等;对于掌握的知识点,复习的时候,应重点复习,反复记忆理解其中的公式和步骤,特别是第二章的结构图的化简,第三章的系统稳定性判断及相应参数求取,第四章的根轨迹绘制,第五章的频域稳定性判据,第六章的系统校正方法,第七章的非线性系统的分析,第八章的z 变换及系统稳定性判据。
1.2 真题剖析1.2.1 2016 年真题【点评】本年份真题共十二大题:都为计算题,总计150 分;和往年考试题目对比,题型变化很小,其中,题型变化最大的是第六题求取系统临界稳定条件下的参数,第七题的给定相频特性表达式求取系统传函。
《自动控制原理》孙亮、杨鹏北京工业大学exe【khdaw_lxywyl】

30 s (0.1s + 1)(0.2s + 1)
C(s)
107
课后答案网
习题 8-15
8-16 校正后的控制系统如题图所示,如采用计算机控制,由数字控制器 Dc ( z ) 代替模 拟控制器 Gc ( s ) ,试写出迭代控制算式的表达式,并确定采样间隔时间 T 的上限。
(2) x ( k + 2) − 3 x ( k + 1) + 2 x ( k ) = 0
w.
出输出信号波形 c (t ) 。
课
1 − e −Ts ( 4) X ( s ) = 2 s ( s + 1) ∗ 8-3 已知采样信号的 z 变换 X ( z ) 如下,试求 z 反变换 x (t ) 。 z ( 1) X ( z ) = ( z − 1)( z − 2) 1 ( 2) X ( z ) = ( z − 1)( z − 2) z ( 3) X ( z ) = −T ( z − e )( z − e − 2T ) z ( 4) X ( z ) = 2 ( z − 1) ( z − 2)
ww
w.
108
kh da w. co m
习题 8-16
R(s)
T
T=0.5 秒 D(z)
T
+
-
答
课
后
案 网
1 − e −Ts s
2 s ( s + 2)
C(s)
习题 8-17
课后答案网
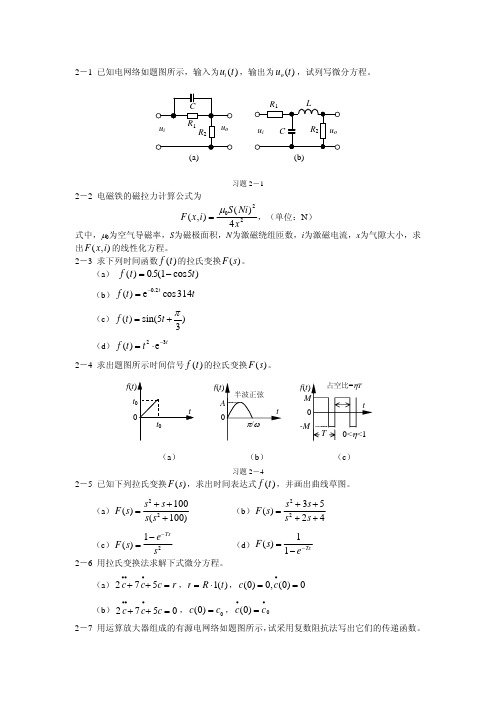
2-1 已知电网络如题图所示,输入为 ui (t ) ,输出为 uo (t ) ,试列写微分方程。
ww
w.
kh da w. co m
++ ++
北京工业大学《自动控制原理》2018-2019学年第二学期期末试卷

北京工业大学2018——2019学年第2学期《自动控制原理》考试试卷A卷考试说明:考试时间:95分钟考试形式(开卷/闭卷/其它):闭卷适用专业:信息学部自动化学院自动化专业、机器人工程专业承诺:本人已学习了《北京工业大学考场规则》和《北京工业大学学生违纪处分条例》,承诺在考试过程中自觉遵守有关规定,服从监考教师管理,诚信考试,做到不违纪、不作弊、不替考。
若有违反,愿接受相应的处分。
承诺人:学号:班号:。
注:本试卷共4大题,满分100分,由考试试卷.pdf和答题纸.word两个文档构成。
考试时必须使用答题纸.word文档作答,并将答案嵌入在题目下方,如因答案嵌入在其他位置而造成的成绩缺失由考生自己负责。
卷面成绩汇总表(阅卷教师填写)题号一二三四总成绩满分20202040得分得分一、填空题(每小题2分,共20分)1.自动控制系统的基本组成部分包括______、______、______和______。
2.在闭环控制系统中,控制器的作用是根据______信号和______信号之间的差异来生成控制信号。
3.比例控制器的输出信号与输入信号的比值称为______。
4.在自动控制系统中,______负责将控制信号转换为被控对象的输入信号。
5.控制系统的稳态误差是指系统输出在稳定状态下与期望输出之间的______。
6.自动化控制系统通过对生产过程的______进行监测和调节,实现生产效率和质量的提高。
7.控制系统中,______用于对反馈信号进行处理和调节,生成控制器的输入信号。
8.反馈器的作用是判别被控对象的输出与期望输出之间的______。
9.比例-______-微分(PID)控制器是常用的控制器类型之一。
10.控制系统的输入信号经过______处理后,通过______作用于被控对象,产生相应的输出。
得分二、选择题(每小题2分,共20分)1.在自动控制系统中,反馈的作用是:a)控制系统的输入信号b)提供被控对象的输入信号c)判别被控对象的输出与期望输出之间的差异d)调节比例增益2.比例控制器的输出信号与输入信号的比值称为:a)增益b)反馈c)控制信号d)误差3.开环控制系统和闭环控制系统的区别在于:a)是否有传感器b)是否有反馈c)控制器的类型不同d)开关的位置不同4.PID控制器中的"PD"代表:a)比例-微分b)比例-差分c)积分-微分d)比例-导数5.在自动控制系统中,执行器的作用是:a)测量被控对象的信号b)控制控制器的输出信号c)将控制信号转换为被控对象的输入信号d)判别被控对象的输出与期望输出之间的差异6.控制系统的稳态误差是指:a)系统输出的稳定波动范围b)控制信号的变化范围c)期望输出与实际输出之间的差异d)控制系统的输入信号与输出信号之间的误差7.变频器常用于控制:a)温度b)压力c)电流d)转速8.自动化控制系统能够实现的效果包括:a)提高生产效率和质量b)减少生产成本c)增加设备的寿命d)降低能耗9.控制系统中的传感器用于:a)测量被控对象的输入信号b)判别输出与期望输出之间的差异c)调节比例增益d)生成控制信号10.自动化原理中的反馈控制是一种:a)有源控制b)无源控制c)开环控制d)闭环控制得分三、判断题(每小题2分,共20分)当然,以下是十道判断题:1.在闭环控制系统中,控制器的输出信号根据传感器测量值和设定值之间的差异来生成。
北京工业大学自动控制原理考研真题

2009年北京工业大学自动控制原理考研真题以上内容由凯程集训营保录班学员回忆整理,供考研的同学们参考。
更多考研辅导班的详细内容,请咨询凯程老师。
一. (10分),已知有源电网络如图所示,试写出该网络的传递函数o i ()()/()G s U s U s =。
C 1+- u i u oR 1R 2 C 2二、(10分)已知某系统的结构图如图所示,++0.5s-+ - + 10.11s +10s0.2X 4(s) X 0(s)5s试化简结构图求传递函数40()()/()G s X s X s =。
三、(20分)设单位反馈系统的开环传递函数为o (10.2)()(10.25)K s G s s s -=+(1) 试作根轨迹草图;(2)试确定闭环系统稳定时开环增益K 的取值范围。
四、(10分)带有扰动信号输入的控制系统其结构图如图所示,输入信号为()1()r t t t =⋅,扰动作用为()1()n t t =,(1)试计算该系统的稳态误差;(2)试确定稳态误差为零的条件。
+N (s)C (s) R (s) + -K s T s 221()++K T s 111+五、(20分)已知单位反馈最小相位系统的开环对数幅频特性()L ω(折线)如图所示,ω-40dB/dec1103.160dB-20dB/dec -80dB/decL (ω)(1)试写出开环传递函数o ()G s ; (2)用奈氏判据判别闭环系统的稳定性。
六、(10分)已知单位反馈系统的开环传递函数为o (5)()(3)K s G s s s +=+试确定闭环系统阶跃响应具有最大阻尼振荡频率ωd,max 时,系统开环增益K 开的值,闭环极点s 1,2的值以及阻尼振荡频率ωd 的值。
七、(20分)已知单位反馈的最小相位系统其开环对数幅频特性o ()L ω(折线)如图所示0dBω1-1 10dB L o (ω)(1) 写出该系统的开环传递函数o ()G s ;(2)作4阶参考模型校正设计,满足:开环截止频率c 3.16ω=,中频段宽度10h =,开环增益o 10K =,写出4阶参考模型o4()G s 与串联控制器c ()G s ;(3)在图上做出4阶参考模型特性o4()L ω和校正装置特性c ()L ω。
北京工业大学电控学院08年自动控制研究生考试真题
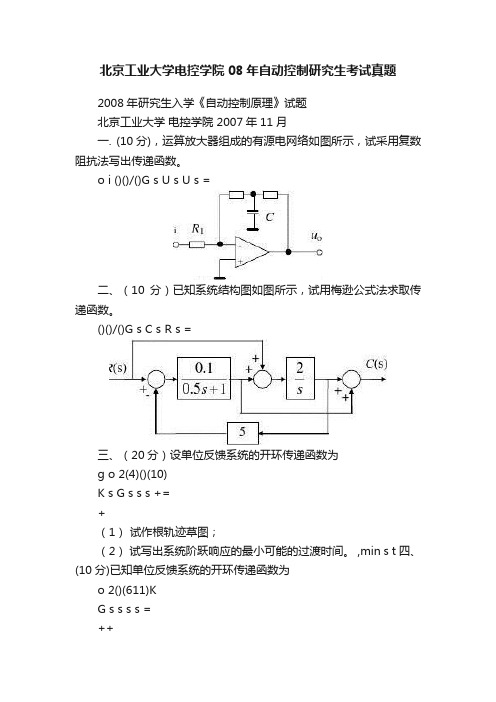
北京工业大学电控学院08年自动控制研究生考试真题2008年研究生入学《自动控制原理》试题北京工业大学电控学院 2007年11月一. (10分),运算放大器组成的有源电网络如图所示,试采用复数阻抗法写出传递函数。
o i ()()/()G s U s U s =二、(10分)已知系统结构图如图所示,试用梅逊公式法求取传递函数。
()()/()G s C s R s =三、(20分)设单位反馈系统的开环传递函数为g o 2(4)()(10)K s G s s s +=+(1)试作根轨迹草图;(2)试写出系统阶跃响应的最小可能的过渡时间。
,min s t 四、(10分)已知单位反馈系统的开环传递函数为o 2()(611)KG s s s s =++试由代数稳定性判据确定系统闭环主导极点的实部小于-1的最大K 值,并计算此时系统的静态速度误差系数。
v K 五、(20分)已知最小相位系统的开环传递函数为o 1()(1)(0.11)G s s s s =++(1)试作该系统的对数幅频特性o ()L ω(折线);(2)计算该系统的幅值裕度g L 和相位裕度c γ。
六、(10分)已知单位反馈系统的开环传递函数为o (4()(2)K s G s s s )+=+试确定闭环系统阶跃响应具有最大超调量时,系统开环增益的值。
M p,max K 开七、(20分)已知单位反馈的最小相位系统其开环对数幅频特性o ()L ω(折线)如图所示0dbω1-120db L o (ω)(1) 写出该系统的开环传递函数o ()G s (2) 作2阶参考模型校正设计,满足:开环截止频率c 8ω≥,写出2阶参考模型与串联控制器。
o2()G s c ()G s (3) 在图上做出2阶参考模型特性o2()L ω和校正装置特性c ()L ω八、(10分)已知采样控制系统的结构图如图所示,开环脉冲传递函数为2o 25(1)()(1)()T T e zG z z z e =??,试求闭环系统稳定时,采样间隔时间T 应满足的条件。
自动控制原理习题试卷(附解析)-合辑-北京工业大学
可简写为
R1R2C
duo (t) dt
+
(R1
+
R2
)uo
(t )
=
R1R2C
dui (t) dt
+
R2ui
(t)
•
•
R1R2C uo (t) + (R1 + R2 )uo (t) = R1R2C ui (t) + R2ui (t)
(2)由题图,设电流变量如图所示,写出变量约束方程为
∫ R1i(t
(a)
(b)
习题 2-8
2-9 画出下面电网络的结构图,并化简求取传递函数。
C1
ui
R1
R2 C2
uo
R1
ui
C1
C2 R2
uo
(a) 习题 2-9
2-10 已知陀螺动力学系统的结构图
(b)
R1(s) +-
G1(s)
C1(s)
G4(s)
G3(s)
C2(s)
G2(s)
+
R2(s)
习题 2-10
2-11 题图所示的力学测量系统原理,在满足相应要求的条件下,可以用于地震测量,也可 以用于测量物体的加速度,位移量 y(t) 和 y0 (t) 均为相对于惯性空间的位移。
ω
所以拉氏变换为
F(s)
=
F1(s) +
F2 (s)
=
Aω s2 +ω2
⋅ (1+
e
−π ω
s
)
(c) 由于信号 f (t) 为周期信号,第一周期的信号如图所示,
其拉氏变换为
F1 (s) =
自动控制原理_课后答案(孙亮_杨鹏_着)_北京工业大学出版社
2-1 已知电网络如题图所示,输入为 ui (t ) ,输出为 uo (t ) ,试列写微分方程。
C ui R1 R2 uo ui R1 C (b)
习题 2-1
L R2 uo
(a)
题解: (1)由题图,设电流变量如图所示 ,写出变量约束方程为
R1i1 (t ) + R2i (t ) = ui (t )
F (s) = 1 +
s +1 s +1 = 1+ s + 2s + 4 ( s + 1) 2 + ( 3 ) 2
2
作拉氏反变换,有
f (t ) = L−1 [1 +
s +1 ( s + 1) 2 + ( 3 )
] = δ (t ) + e −t cos 3t 2
时间曲线如图所示。 (c) F ( s ) 可分解为
分方程为
R1 ui C
i i1
L R2
i2 uo
化简,消去中间变量 i1 (t ), i2 (t ), i (t ) 得到输出变量为 uo (t ) ,输入变量为 ui (t ) 的微
R1 LC u o (t ) + ( L + R1 R2C ) u o (t ) + ( R1 + R2 )uo (t ) = R2 ui (t )
→ F2 ( s ) = −
t0 f3(t)
f2(t)
1 1 −t 0 s 1 −t0 s 1 − e − t0 s (1 + t0 s ) F ( s ) = F1 ( s ) + F2 ( s ) + F3 ( s ) = 2 − 2 ⋅ e − t0 ⋅ ⋅ e = s s s s2 (b) 由于信号 f (t ) 可以分解为信号的组合如图所示, f(t) f1(t) f2(t) A Aω f1 (t ) = A sin ωt → F1 ( s ) = 2 2 s +ω 0 π π − s Aω π ω → F2 ( s ) = 2 ⋅e f 2 (t ) = sin ωt ⋅1(t − ) 2 ω s +ω ω
2020年北京工业大学硕士研究生招生考试自命题科目考试大纲之821自动控制原理
2020年硕士研究生招生考试大纲考试科目名称:自动控制原理考试科目代码:821一、考试要求自动控制原理考试大纲适用于北京工业大学信息学部人工智能与自动化学院(0811)控制科学与工程、(0854)电子信息(专业学位)硕士研究生招生考试。
考试内容为经典控制理论部分,该课程是控制学科重要的专业基础理论课。
自动控制原理的考试内容主要包括线性定常系统的分析与设计,非线性系统以及采样系统的分析.要求考生对其中的基本概念有较为深入的理解,系统掌握应用经典控制理论进行自动控制系统分析的一般方法,并能够完成一般控制系统的校正设计,具有综合运用所学知识分析问题和解决问题的能力以及理论联系实际的能力。
二、考试内容(一)自动控制系统的基本概念(1)熟练掌握自动控制系统的一般术语(2)熟练掌握自动控制系统的基本结构与基本性能要求(3)熟练掌握反馈控制的基本原理(二)控制系统的数学描述方法(1)熟练掌握控制系统微分方程的概念以及电学系统微分方程的建立(2)熟练掌握非线性微分方程线性化的方法(3)熟练掌握传递函数的概念以及电学系统传递函数模型的建立(4)熟练掌握拉式变换,拉式反变换的基本方法;熟练掌握典型信号的拉 式变换;熟练掌握求解系统时域响应的方法。
(5)熟练掌握系统动态结构图的建立;熟练掌握通过结构图的等效变换,梅逊公式求取系统传递函数的方法;熟练掌握控制系统的传递函数,以及系统在多输入作用下输出的表达。
(三)时域分析法(1)熟练掌握时域分析的一般方法以及基本实验信号的作用,熟练掌握控制系统性能指标的概念(2)熟练掌握一阶系统分析(3)熟练掌握二阶系统的分析以及二阶系统性能的改善(4)熟练掌握主导极点的概念以及在一阶、二阶系统分析的基础上,灵活 进行高阶系统分析(5)熟练掌握控制系统稳定的充要条件以及代数稳定性判据(6)熟练掌握稳态误差的求取以及稳态精度补偿(四)根轨迹法(1)熟练掌握根轨迹的概念与根轨迹方程(2)熟练掌握利用根轨迹的基本法则绘制根轨迹图(3)熟练掌握参量根轨迹及正反馈系统根轨迹图的绘制(4)熟练掌握基于根轨迹的控制系统分析(五)频率分析法(1)熟练掌握频率特性的概念,频率特性的数学表示(2)熟练掌握极坐标图的绘制以及伯德图的绘制(3)熟练掌握典型环节的频率特性以及开环频率特性作图(4)熟练掌握频域稳定性判据(5)熟练掌握利用开环频率特性进行闭环系统分析(六)控制系统的校正方法(1)熟练掌握系统校正基础及校正系统的结构(2)熟练掌握根轨迹法校正(3)熟练掌握频率法校正(4)熟练掌握参考模型法校正(5)熟练掌握频率法反馈校正(七)非线性系统分析(1)熟练掌握控制系统的非线性特性(2)熟练掌握相平面分析法(3)熟练掌握描述函数法(八)采样控制系统分析基础(1)熟练掌握信号的采样与采样定理(2)熟练掌握信号复现与零阶保持器(3)熟练掌握采样信号的z变换与z反变换(4)熟练掌握典型信号的z 变换(5)熟练求取脉冲传递函数(6)熟练掌握采样系统的性能分析三、参考书目1、《自动控制原理》(第三版),孙亮,高等教育出版社,2011 年出版。
西工大821自动控制原理-2习题及答案-第二章 控制系统的数学模型
西工大821自动控制原理第二章 控制系统的数学模型习题及答案2-1 试建立图2-27所示各系统的微分方程。
其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dty d m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dt t y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++ (c) 应用复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (3) 2)()(R s Uc s I = (4)联立式(3)、(4),可解得: CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++(d) 由图解2-1(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5) )()(1)(s RI s RI Css I c R c -= (6) []Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明图2-28中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
北京工业大学自动控制原理 期末试题及答案
《自动控制原理》期末试卷答案(A )北京工业大学 电控学院 日期:2005年12月25日大题 一 二 三 四 五 六 七 八 九本题 分数 10 10 10 10 10 10 10 1515 本题 得分一、(10分)已知有源电网络如图所示。
由复数阻抗法求传递函数)()(0s U s U i 。
解: 211()R Cs G s R Cs+=−二、(10分)已知输入前馈系统的结构图如图(a )所示,要求保证闭环传递函数不变的前提下将输入前馈结构变换成输入补偿结构如图(b )所示 ,试确定输入补偿器传递函数()f G s 。
(a)(b)解 114.0)(+=s s G f三、(10分) 设系统结构如图所示,试计算系统单位阶跃响应时的超调量M p 和过渡时间s t 。
解:系统闭环传函为2100()10100C G s s s =++2100,10n n ωω==210,0.5n ζωζ==,p s 4100%16.3%,0.8nM e t ζω=×===四、(10分)已知系统结构图如图所示,试写出闭环传递函数,并计算输入信号为()0.5r t t =时的稳态误差。
解:(1)系统闭环传递函数为c 25(0.21)()0.055s G s s s +=++(2) ss c 2000.5lim ()lim [1()]s s e sE s s G s s→→==−222220050.50.050.5lim [1]lim 00.0550.055s s s s s s s s s s s s→→+=⋅−⋅=⋅⋅=++++五、(10分)已知系统结构图如图所示,试作系统的根轨迹草图。
解:1、起点 sq1=0,sq2= -5, sq3=-102、终点 sz1= sz2= sz3= -∞3、实轴根轨迹 [0 -5], [-10 -∞]4、分离点321550K s s s =++,2330500dKs s ds=++=,7.89(), 2.11s =−−舍5、渐近线180(21)60,180k n m θ±+==±±−D D D 1553p z n m σ−=−=−=−−∑∑ 6、虚轴交点3215500s s s K +++= 15015750KK K−750,7.07K ω===±六、(10分)二阶线性定常系统的微分方程为20x xx +−= 试确定该系统的奇点以及奇点类型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
北京工业大学821 自动控制原理目录目录 (1)1.1 真题分析 (2)1.2 真题剖析 (3)1.2.1 2016 年真题 (3)1.3 真题剖析要点总结. (16)1.3.1 常考知识点总结 (16)1.4 2016 年真题 (18)通过真题的学习和掌握,可以帮助学生把握考试重点。
每年的考点在历年试题中几乎都有重复率,因此,通过对历年真题的把握,可以掌握今年考试的重点。
另外,可以通过对历年真题的学习,把握出题者的思路及方法。
每种考试都有自己的一种固定的模式和结构,而这种模式和结构,通过认真揣摩历年真题,可以找到命题规律和学习规律。
因此,本部分就真题进行详细剖析,以便考生掌握命题规律、知悉命题的重点、难点、高频考点,帮助考生迅速搭建该学科考试的侧重点和命题规则。
1.1 真题分析综合来说,自动控制原理专业课这几年的题型变化不大,主要是计算题型,难度略有增加,侧重于对基础知识点的掌握以及对知识的灵活运用。
在复习时,对于了解的知识点,复习的时候,只需要知道概念性的定义即可,简单的看一下推导的过程或背景知识即可,有助于对相关内容的理解,不要求重点掌握,例如我们课本的第一章,就是一个引言部分,引入自动控制以及自动控制系统的概念;对于熟悉的知识点,复习的时候,应着重把握,理解公式的定义及相应公式的推导和求取、系统稳定的条件、判稳的方法、由稳定条件求取相应指标参数、折线图的绘制步骤、校正的步骤、相平面法和传递函数法、z 变换法及判断系统稳定性等等;对于掌握的知识点,复习的时候,应重点复习,反复记忆理解其中的公式和步骤,特别是第二章的结构图的化简,第三章的系统稳定性判断及相应参数求取,第四章的根轨迹绘制,第五章的频域稳定性判据,第六章的系统校正方法,第七章的非线性系统的分析,第八章的z 变换及系统稳定性判据。
1.2 真题剖析1.2.1 2016 年真题【点评】本年份真题共十二大题:都为计算题,总计150 分;和往年考试题目对比,题型变化很小,其中,题型变化最大的是第六题求取系统临界稳定条件下的参数,第七题的给定相频特性表达式求取系统传函。
题目】1解题】设第一个环节输出为则传递函数为:由题意可得c1(t) ,则R x1x CsR1C1(s) =R x Cs =R xR (s) R R R x Cs 1101R x C1C(s)=Cs =1=1 C1(s)=R =RCs 1=0.1sC(s) 1 10 = 100 =nR(s) 0.1S s 1 =s(s 1 )=s(s 2 n)R x C CR x10R x C2 0.707 10分析】这种题每年基本上都会出,就是基本电路知识的考查,一般会有运算放大器的参与,所以平时的复习中应注意运放的性质及特点,由运放组成的几种电路模型,还有就是牢记基本电路元器件的阻抗,节点电流法,基尔霍夫定律,还有就是注意微分方程表达式的求取,防止考到,认真看课本和课后习题,很多都是源于课本的例题和课后习题,这部分的内容不难,注意多级放大器之间的关系。
历年出现的考题里还有让求传递函数的,那么就根据复数阻抗法求取即可。
题目】2【解题】利用梅森公式求解该系统共有3 条独立回路:L1=-G1(s) ,L2=-G2(s)G3(s),L3=G2(s)G1(s)有一个两两互不接触回路:L1 L2 =G1(s)G2(s)G3(s)特征式为: =1-( L1+L 2+L 3)+L 1L2只有u1作用时,可得前向通道与对应的余子式为:P1=G1(s),错误!未找到引用源。
=1+G2(s)G3(s) ;P2=-G1(s)G2(s) ,错误!未找到引用源。
=1;P3=-G1(s)G2(s)G3(s),错误!未找到引用源。
=1;得Y1 =P1 1P2 2P3 3u1只有u2 作用时,可得前向通道与对应的余子式为:P4= G2(s),4=1;P5=G2(s)G3(s),5=1+G1(s);解得R x 70.7k得系统总输出表达式Y1(s)(G1(s) G1(s)G2(s))U1(s) (G2(s) G2(s)G3(s) G1(s)G2(s)G3(s))U 2(s)【分析】这种题也是历年真题都会考的一种类型,结构图的化简,进而求取系统的传递函数。
这部分需要重点掌握的内容是,熟练掌握结构图化简的方法(结构图化简或梅逊公式),几个类型的结构图的模块的等效,梅逊公式的每个字母的含义;运动模态与特征根的关系,零输入响应,零状态响应;开、闭环传递函数,前向传递函数的定义。
这种题比较常规。
【题目】3解题】1)系统闭环传递函数为Y1 =P4 4P5 5u21 G1(s) G2(s)G3(s) G1(s)G2(s) G1(s)G2(s)G3(s)G c(s)10s(s 3)(s 4) 10闭环特征方程为由劳斯判据可知,系统稳定。
系统的稳态误差为系统的主导极点为s3+7s2+12s+10=0e ss=错误!未找到引用源。
=1.2s1,2=-1+jn =1.414, =0.707M p=4.3%,t s=3阶跃响应曲线如下图所示分析】该题属课本第三章内容,给定传递函数判断系统稳定性,绘制输入状态响应曲线。
这种题应熟记公式,知道公式的定义式,会图形表示与识别;时域分析法、拉式变换法、稳定性分析、稳态误差等;正确理解稳定性、系统的型别和静态误差系数等概念;正确理解线性定常系统的稳定条件;正确理解时域响应的性能指标( M p、t r、t d、t p、e ss等)。
本章出题分值也比较高,大家应好好把握基本概念。
偏差的拉普拉斯变换为:1当输入为单位斜坡R(s) 12时,s2E(s) R(s) C(s) R(s) R(s)G c(s)a1s a0=(1- n n 1a n s a n 1sn n 1=a n s a n 1sn n 1 a n s a n 1s)R(s)a1s a02 a a s1s a R(s)a1s a0题目】4解题】e sslim sE(s)s0lim s1na n sn1a n 1s2a1ss02 s na n s n1a n 1s a1s a0当输入为单位加速度信号1R(s) 3 s时,e sslim sE(s)s0lim ss01n a n s nn1a n 1s2a1s a23 s na n sn1a n 1s a1s a0a0分析】该题属课本第三章内容,给定传递函数求取系统在不同的输入信号下的稳态误差。
正确理解和重视稳态误差的定义并能熟练掌握e ssr、e ssn的计算方法;正确理解系统差生误差的原因,及消除稳态误差时系统加入的环节的特点,掌握改善系统动态性能及提高系统控制精度的措施;对三种典型函数(阶跃、斜波、加速度)及其组合外作用,也可利用静态误差系数和系统的型数计算稳态误差。
题目】5【解题】系统开环传递函数为:由劳斯判据可得系统稳定的条件为:0.1分析】该题属课本第三章内容,给定系统传递函数,求取系统稳定条件下参数应满足的条件。
求取传递函数时,能熟练运用结构图化简或梅逊公式法求取传递函数,进而掌握劳斯判据判断系统稳定性的方法,列劳斯表即可得出系统稳定条件下相应参数应该满足的条件。
理解系统稳定的概念、线性定常系统稳定系统稳定的条件,熟练掌握代数稳定性判据。
该章节大家在复习的时候应重点把握。
题目】6则闭环传递函数为:闭环特征方程为:G0(s)= s 1G c(s)= s3s(s 0.5)5s(s 0.5)5(s 1)(0.5 5 )s25s 532s (0.5 5 )s 5s 5 05(s 1)s3(0.5 5 )s2解题】系统的开环传递函数为:111Ts 1 Ts 1 T ss 3(1 1)【分析】 该题涉及课本第三章和第四章内容,给定参数的值,求取系统传递函数,判断系统临界稳定状态下的 参数的取值范围,注意系统临界稳定的条件是系统的实部为零,进而可以得出参数的值。
其次,当系统极 点个数减去零点个数大于等于2 时,有如下结论:系统开环极点之和等于闭环极点之和。
进而问题就可以 解决了。
题目】7G c (s)11 11Ts1 Ts 1 T s1系统闭环特征方程为:T 3S 3 ( 2T 2 T222T 2)S2( 2TT T)S (K 1)(1) =1 时,令 s j 则系统临界稳定时的放大倍数 : K=8(2)T=1 时,在虚轴上的两个极点为: s 1,2 j11由开环极点之和等于闭环极点之和,得系统远离虚轴的极点为:所以开环传递函数为:10s 12s 2(s 1)(0.1s 1)20lg 1 2 20lg 1 40lg c0.120.1 1解题】1)由相频特性的表达式可得系统的开环传递函数表达式为G 0(s) 2 K(10s 1)0 s 2(s 1)(0.1s 1)作该系统的博得图:在 =0.1 处,h=20lg10 20lg10=20lg100lg c lg 0.140,c1 , K=1G 0(s)2)A(1) 10, 20lg A(1) 40lg c lg13.16rad / s(3.16) 180 arctan3.16 arctan3.16 0.1 arctan3.16 10=-181.78则相角裕度 c 1.78【分析】 该题属于课本第五章的内容。
该题可以理解为是课本例题的一个逆向应用,一般情况下是告诉我们传 递函数让我们来画出它的对数频率特性图,进一步判断系统稳定性,但是这道题是告诉我们相频特性表达 式,以及在相频特性下满足的条件,让我们求解传递函数。
所以我们在平时的复习中要理解课本知识的内 涵和根本所在,这样举一反三,方显轻而易举。
所以,平时复习时应注意这些概念知识:开环极坐标图和 伯德图、最小相位系统、奈奎斯特判据、正确理解谐振峰值、频带宽度、截止频率、相角裕度、幅值裕度 以及三频段等概念;正确地运用频率特性的定义进行分析和计算,计算部件或系统在正弦输入下的稳态响 应以及反求结构参数。
题目】8【解题】( 1 )系统闭环特征方程为0.001s 3+0.11s 2+s+K=0静态速度误差系数为K v =K由劳斯判据得系统稳定时, K<110 K v ≥ 100,系统稳定的静态速度误差系数取值范围是 100≤K <110解得因此若要求系统的静态速度误差系数 (2)固有特性的博德图如图所示满足要求。
【分析】该题涉及课本系统判稳、矫正部分的内容。
针对第一问求解在系统要求下,判断满足系统指标要求下 的系统稳定性,那么很明显,这和前面的题有些相似,就是由系统闭环特征方程,使用劳斯判据,判定系 统稳定下参数的取值范围,解之。
第二问,加入一个校正环节后,判断系统稳定性,那么,只需要求出新 系统的相角裕度是不是满足题中所说的条件即可,求相角裕度,就涉及到求解系统的截至频率,这由折线c031.6rad / s加入校正装置后,博得图如图所示:c50rad /s则:(56) 90 arctan 5 arctan 0.5 =-141 arctan 0.05 50 arctan 0.005 50则加入校正装置后的相角裕度为3930图可以求出。