实时自动调平控制系统设计
基于MSP430F149单片机的车体调平装置设计

度Байду номын сангаас更 高。
( 2)稳定 性 : 为了适应现 代武器
抗 倾覆 能力强 的 自动调 平控 制技术应 炮 工作性 能的 条件下最 大程度 的提高
运而生 。
系统 的机动性 。
高机动性 和快 速反应 能力 的需求 ,要
求车载平 台有更高的稳定性 ,采用机
I—: … I , — ; … …
变 更工作地 点 。为了保证 这些军 用武 坦克 火控调 试 台等装备 。以火箭 炮为 器 的机 动性能 , 往 以载车 为运 输载 例 ,火箭炮 被大量 使用在 高科技 战争 往
体 ,如火 箭炮这 样的大 型武器就 被安 中 ,为了提 高其生 存能 力 ,对其 机动
自动 调 平 系统 发 展 趋 势概述
电伺服 系统 代替 电液伺服 系统 ,加上 单 片机 系统 可靠性 与抗干扰 技术 的不 断发 展 ,奠定 了单片机 系统 稳定 可靠
工 作的 基础 。尤 其是 计算机 与传 感器
技术的发展,使高稳定性的调平系统
得 以实现 。 ( 3)快速性 :目前 ,倾角传感 器
的 响应速 度 已显著提 高 ,新 型倾 角传
度 为. 0 一+5 ℃ 。根 据这 些要求 , 码角度值 (0 3 ) 0 A : 4℃ 5 3 - 9 ; D0 角度发送
选 用 北 京 星 网 宇达 科技 公 司 的 T 字尾标识符 ( W— 换行 ,回车 ) 。 T 11 倾 角 传感 器 。该 传 感器 内部 S 1O 采 用高速数 字处 理器 ,对多维 重力 加 速 度 信 息 进 行 处 理 与 姿 态 角解 算 , ②二进制码发送格式 ( 角度 ) 单 :
说 明—— 2 头标识 ¥; F: 4: F 角
液压自动平衡控制系统设计

液压自动平衡控制系统设计摘要:轧机上支承辊平衡机构是轧机主体设备的重要部件。
在换辊过程中上工作辊装置及上中间辊装置经常会出现球轴承损坏、辊面压痕的问题。
海上作业及移动设备等特殊工况下工作台表面在外力作用下发生倾斜,影响工作效率及可靠性,对此基于PLC设计了自动液压平衡控制系统。
该系统由PLC、人机交互界面、传感器及液压泵站组成。
传感器对工作面倾角进行监测,通过Modbus-RTU将检测结果传递到PLC进行分析计算,根据分析结果对液压系统进行控制,实现工作面自动平衡。
关键词:液压;自动平衡;控制;设计1导言本文作者基于三菱FX3U系列PLC设计了自动液压平衡系统,系统框图如图1所示。
工作平台表面在外力作用下发生倾斜时,倾斜传感器采集8个不同方向倾斜数据并实时反馈到PLC进行处理,根据处理结果控制液压系统液压缸伸缩量以调整工作面倾角,实现工作台的平衡,同时将工作面倾斜角度显示于人机界面。
系统调整精度为0.2°,调整时间小于6s。
2系统整体设计该平衡控制系统通过对称布置的4个液压缸对工作面进行支撑,将倾斜传感器安装于工作面底面,当工作表面倾斜时,传感器检测当前工作表面倾斜角度,并将检测结果传递给PLC分析计算,通过上位机人机界面显示倾斜角度,同时PLC通过控制电磁阀通/断控制液压缸运动,完成工作面倾角调整,直至工作表面恢复水平。
图2 原液压平衡控制系统原理图由图2可以看出,液压动力站来的压力油经减压阀减压后,电磁换向阀YA1通电,压力油打开液控单向阀进入上支承辊平衡缸有杆腔,上支承辊抬起,平衡上支承辊装置的重量。
电磁换向阀YB1通电则上支承辊装置落下。
平衡缸的运行速度由单向节流阀控制。
溢流阀防止系统过载。
电磁换向阀具有位置保持功能,通电后可以延时断电。
液控单向阀防止在事故状态断流时上支承辊装置下落。
减压阀的设定压力一般根据上支承辊装置的重量、平衡缸无杆腔与有杆腔的受力面积以及考虑到的摩擦力来计算数值。
拓竹自动调平原理

拓竹自动调平原理
拓竹自动调平是指通过传感器实时检测机器人或移动设备的倾斜角度,并通过控制系统自动调整机器人的平衡,使其保持稳定的运动状态。
拓竹自动调平的原理主要包括以下几个步骤:
1. 传感器检测:通过安装在机器人或移动设备上的倾斜传感器,实时检测机器人的倾斜角度。
2. 数据处理:将传感器获取的倾斜角度数据传送给控制系统,进行数据处理和分析。
3. 控制系统:控制系统根据传感器数据和预设的平衡算法,计算出机器人需要调整的姿态和力矩。
4. 调整机构:根据控制系统的指令,调整机器人的姿态和力矩,使机器人保持平衡状态。
5. 实时调整:通过不断地获取传感器数据、进行数据处理和控制系统指令的反馈,实时调整机器人的姿态和力矩,以保持稳定的运动状态。
拓竹自动调平原理的核心是通过传感器实时检测机器人的倾斜角度,并通过控制系统自动调整姿态和力矩。
这种技术广泛应用于机器人、无人机、平衡车等领域,可以提高设备的稳定性和操作效果。
浅析滑移装载机铲斗自动调平系统
浅析滑移装载机铲斗自动调平系统本文从网络收集而来,上传到平台为了帮到更多的人,如果您需要使用本文档,请点击下载按钮下载本文档(有偿下载),另外祝您生活愉快,工作顺利,万事如意!滑移装载机主要用于作业场地狭小,地面起伏不平、作业内容变换频繁的场合,具有灵活小巧,工作效率高,多功能,一机多用、简单操作,维护保养便利等优点,近十几年来得到了高速的发展和广泛的应用。
滑移装载机铲斗自动调平系统对于精准定位,提高工作效率、降低劳动强度以及有效较少装载物料的掉落,均有至关重要的作用。
对于铲斗自动调平系统,目前市场上主流机型的液压系统原理是:利用动臂有杆腔通过调平阀,将流量合理地分配给铲斗大腔,实现铲斗自动调平功能。
利用齿轮泵供油,能量损耗大。
本文中的铲斗自动调平系统主要是利用负载敏感流量分配原理,独立供给动臂油缸大腔和铲斗油缸大腔合理的流量,从而实现动臂提升、铲斗自动调平功能。
本文以中国龙工某型号滑移装载机为研究对象。
1系统工作装置滑移装载机铲斗自动调平系统有两个执行元件:动臂液压缸和铲斗液压缸,采用了与负载压力无关的流量分配负荷传感控制系统。
多路阀是该系统的主要部分,它是拥有辅助功能的集中控制装置,其结构紧凑,控制灵活,同时也减少了连接管路和流阻的损失,提高了工作可靠性。
本系统多路阀结构是一种液控方式多路阀,他由进油联、换向联(铲斗联、动臂联)和尾联组成。
柱塞泵输出的工作油经过进油联通向换向联再流入执行元件。
第一联是进油联。
它集成有三个功能控制阀:主溢流阀、中位卸荷阀、压力补偿卸荷阀,分别控制系统的最高工作压力、中位卸荷压力、压力补偿阀管路压力。
第二、三联是换向联。
每个换向联由换向阀、压力补偿阀、单向阀、过载溢流补油阀等组成,用于控制液压缸两个方向的运动。
2多路阀负载独立流量分配控制滑移装载机动臂提升铲斗自动调平,是一种复合动作,若柱塞泵供油能力不能满足复合工作所需要的流量时,液压油将流向具有最低负载压力的执行机构,而最高负载回路上的执行元件运动速度就会迅速降低直至停止,从而使滑移装载机失去复合动作的协调能力。
基于单片机的坦克火控调试台自动调平系统研究
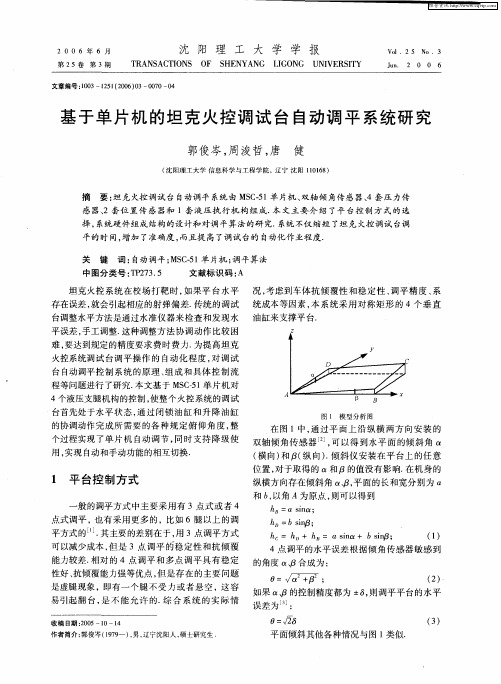
位置 , 对于 取得 的 和 的值 没有 影 响. 在机 身 的
1 平 台控 制 方式
一
纵横方 向存 在倾 斜 角 、 平 面 的 长 和宽分 别 为 n , 和 b以角 为原 点 , , 则可 以得 到
hB=n sn i a; h D=b sI ; i
般 的调平 方式 中主 要采 6 月 0 年6 0
第 25卷 第 3期
沈 阳 理 工 大 学 学 报
TRANS ACTI ONS OF S HENYANG LI GONG UNI VERS TY I
Vo 1.2 5 No . 3
Jn u. 2 0 0 6
感器、 2套位 置 传 感 器 和 1套 液压 执 行 机 构 组 成. 文 主要 介 绍 了平 台控 制 方 式 的选 本
择, 系统硬 件 组成 结构 的设计 和 对调 平 算 法的研 究. 系统 不仅 缩短 了坦克 火控 调试 台调
平 的 时 间, 加 了准确度 , 增 而且 提 高 了调 试 台的 自动化 作 业程度 .
点式 调平 ,也有 采 用 更 多 的 ,比如 6腿 以 上 的调 平方 式的 ¨ . 其主要 的差 别在 于 , 3点 调 平方 式 用 可 以减少成 本 , 是 3点 调平 的稳 定 性 和抗 倾 覆 但
h =h c D+ h B= ns s+ bs ; i n i q
() 1
4点调平的水平误差根据倾 角传感器敏感到 能力较 差. 相对 的 4点 调 平 和 多点 调 平 具 有 稳 定 的角度 、 成为 : 合 性好 、 倾 覆能力 强 等优点 , 是存 在 的主 要 问题 抗 但 0=√ + ; () 2 是 虚腿 现象 ,即有 一 个 腿 不 受 力 或 者悬 空 ,这 容 如果 的控制 精度 都为 ± 则 调平 平 台 的水 平 , 易 引起 翻 台 , 不 能 允 许 的 . 合 系 统 的 实 际 情 是 综 误 差为 :
3d打印机自动调平原理
3d打印机自动调平原理3D打印机自动调平原理引言:随着3D打印技术的不断发展,3D打印机已经成为许多领域的重要工具。
然而,要获得高质量的打印结果,确保打印物的精度和稳定性,是一个非常重要的问题。
而自动调平技术正是解决这一问题的关键。
本文将介绍3D打印机自动调平的原理及其工作过程。
一、概述自动调平是3D打印机中一项非常重要的技术,它通过调整打印平台的高度,使其与打印喷头保持平行,从而确保打印物的精度和稳定性。
在传统的3D打印机中,调平是由操作人员手动进行的,需要耗费大量的时间和精力。
而自动调平技术的出现,极大地提高了打印效率和打印质量。
二、原理自动调平的原理主要基于传感器和控制系统的配合。
一般来说,常用的传感器有以下几种:1. 压力传感器:通过检测打印平台与打印喷头之间的压力变化,判断打印平台是否处于水平状态。
当打印平台偏离水平位置时,压力传感器会发出信号,通知控制系统进行调整。
2. 光电传感器:通过发射光线并检测光线的反射情况,来判断打印平台与打印喷头之间的距离差异。
当距离差异超过一定范围时,光电传感器会发出信号,通知控制系统进行调整。
3. 加速度传感器:通过检测加速度的变化,来判断打印平台是否处于水平状态。
当打印平台发生倾斜时,加速度传感器会发出信号,通知控制系统进行调整。
控制系统根据传感器的反馈信号,通过电机和螺杆等机械装置,调整打印平台的高度,使其与打印喷头保持平行。
调整过程中,控制系统会不断监测传感器的反馈信号,直到打印平台达到水平状态为止。
三、工作过程自动调平的工作过程一般包括以下几个步骤:1. 启动自动调平功能:在打印机的控制界面上,操作人员选择自动调平功能,并启动该功能。
2. 传感器检测:控制系统会通过传感器检测打印平台的状态。
传感器会发出信号,反馈打印平台与打印喷头之间的差异。
3. 调整打印平台高度:根据传感器反馈的信号,控制系统会通过电机和螺杆等装置,调整打印平台的高度,使其与打印喷头保持平行。
农机驾驶座椅自适应水平调节系统设计与实现

在保 留驾驶 座椅 原 有 调 节 和 减 震 系 统 的情 况 下 ,
21 0 0年 1月
农 机 化 研 究
第 1期
农 机 驾 驶 座 椅 自 适 应 水 平 调 节 系 统 设 计 与 实 现
唐 瑜 ,朱 瑞祥 ,孙 向楠 ,周 贤龙
72 0 ) 1 1 0
( 西北 农林 科 技 大 学 ,陕 西 杨 凌
摘
要 : 基 于 单 片机 A 8 ¥ 1与液 压 技 术 , 计 了一种 农 机 驾驶 座 椅 自适 应水 平 调 节 系统 。该 系 统 能够 根 据农 T9 5 设
在其 下 方左 右 两侧 各设 一个 液压 油 缸 , 当农 机 横 向倾
斜时 , 控制系统采集到倾 角变化信息 , 进而控制 液压
系统 给油 缸供 油 , 通过 活 塞 的运 动 , 整 座 椅 、 复 水 调 恢 平 。 当座椅 向左侧 倾斜 时 , 压 系 统 给 1号 油 缸 的下 液
0 引 言
我 国是一 个 农业 大 国 , 地 面 积 1 2 ×1 m , 耕 .2 0 h 主要 分 布在 山地 、 陵 和 高 原 地 区 , 布 在 平 原 和 盆 丘 分
腔 和 2号 油缸 的 上 腔 同 时供 油 , 座 椅 恢 复 水 平 ; 使 当
座 椅 向右 侧倾 斜 时 , 制 方法 与其 相 反 。 控
农 机 化 研 究
第 1期
2 2 1 数据采 集模 块 ..
一种高精度自动调平工作台设计

一种高精度自动调平工作台设计作者:罗振元田育民马小辉来源:《现代电子技术》2010年第05期摘要:介绍一种高精度自动调平工作台。
该工作台由电子水准器、控制系统、伺服电机等构成,用于工作台的水平检测。
执行机构选用伺服电机,控制系统以ARM微处理器作为核心。
通过构建的“三点法”调平控制模型,实现对工作台面的高精度自动调平。
给出自动调平的控制数学模型、硬件构成和控制方法,在实际应用中已取得较好的效果。
关键词:调平;电机;电子水准器;ARM中图分类号:TP29文献标识码:A文章编号:1004-373X(2010)05-107-03Design of Working Platform with High Precision Automatic Self LevelingLUO Zhenyuan1,TIAN Yumin2,MA Xiaohui2(1.Xi′an University of Arts and Science,Xi′an,710054,China;2.Xi′an Research Institute of Surveying and Mapping,Xi′an,710054,China)Abstract:The working platform with a high precision automatic self leveling is introduced.This platform consists of electronic water leveler,control system and servo motors.The gradient is applied to ascertain whether the working platform′s surface is horizontal or not.The servo motor is used.The control system based on ARM adopts the ″three-point″ leveling principle model to achieve automatic leveling of the high precision.The mathematical model,hardware and control method of self leveling are given,good results are gainedKeywords:leveling;motor;electronic water level;ARM0 引言在现代国防与民用技术中,常常需要把某些设备精确地调整到水平位置,以提高系统的工作性能,达到某一指标要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实时自动调平控制系统设计
稳定平台能够有效的隔离载体运动,确保安装于稳定平台上的装置工作时不会受载体的运动影响。
无论在军事上还是在民用中稳定平台都有着重要的用途。
本文的主要研究对象属于实时稳定平台。
实时稳定平台的载体处于运动状态,要求负载如舰载武器等在载体运动的状态下可靠稳定地工作,多见于高技术含量的武器系统如舰载设备、机载设备等,实时稳定平台对于稳定平台的快速性及动态精度要求较高,手动或滞后调平已经不能满足要求。
1 系统组成
1.1 调平原理
调平系统的结构原理示意图如图1 所示,主要由动平台,三自由度球铰链,支撑杆,二自由度虎克铰,丝杆螺母和滚珠丝杆,基座等部件构成。
动平台通过支点A1,A2 及O 点分别与平台的基座和传动支链相连接,并构成以O 点为直角的等腰直角三角形A1A2O。
系统工作时,当检测到动平台处于非水平状态后,控制系统经过解算得出两球铰应上升或下降的行程,然后驱动电机经传动机构(减速箱)控制丝杆转动带动丝杆螺母上移或下移,继而支撑杆带动球铰控
制动平台进行稳定调平运动。
系统调试时由一个电机通过带轮驱动曲柄摇杆机构带动系统进行摇摆动作,控制系统控制电机进行实时调平。
1.2 控制系统硬件构成
系统由倾角检测部分,控制部分,通信部分,执行部分,限位保护部分,状态显示部分组成,主要包括TMS320F2812 芯片,升降压电路,485 串口通信模块,角度陀螺仪,角速度陀螺仪,电机驱动器,限位开关,状态显示模块等。
系统硬件工作原理如图2 所示。
实时自动调平控制系统以TMS320F2812 芯片为核心,通过485 串口通信控。