基于被动毫米波图像的金属目标特征提取方法
毫米波雷达目标检测算法

毫米波雷达目标检测算法毫米波雷达目标检测算法的基本原理是将毫米波雷达接收到的信号处理后,提取目标区域特征,进而进行目标检测。
毫米波雷达信号在传播过程中受到强烈的衰减,同时受到复杂的多径衰落和噪声的影响,因此需要针对这些特点进行特殊处理。
毫米波雷达目标检测算法的处理流程主要分为如下几个步骤:(1)信号预处理:将毫米波雷达接收的信号进行预处理,比如对信号进行去除杂波、多普勒解调、时域切片等操作。
这些预处理操作旨在减少噪声的影响,提高信号的质量。
(2)目标检测:目标检测是毫米波雷达目标检测算法的核心环节。
在目标检测过程中,需要在雷达图像中提取出目标的特征。
目标的特征可能包括目标的大小、形状、速度等,这些特征可以用于目标的分类和定位。
常见的目标检测方法包括:CFAR检测、波束形成、高斯过程回归、神经网络等。
(3)目标跟踪:目标跟踪是指在目标被检测到后,维护目标的位置和速度信息。
目标跟踪算法主要通过目标运动的预测来确定目标的位置,以及为目标分配一个独特的ID。
常见的目标跟踪算法包括卡尔曼滤波、粒子滤波、扩展卡尔曼滤波、贝叶斯滤波等。
(4)目标识别:在目标被检测和跟踪的基础上,我们还需要确定目标的实际类型。
目标的实际类型可能涉及到目标的分类、识别、校正、分类等一系列进一步处理。
常见的目标识别算法包括神经网络、深度学习、特征提取等。
毫米波雷达目标检测算法在智能交通、无人机导航、安保监控等领域具有着广泛的应用前景。
其中,智能交通领域是毫米波雷达目标检测算法的重要应用场景之一。
具体应用包括:(1)车辆控制:对于行驶过程中的车辆,可以通过毫米波雷达目标检测算法对车辆进行分类和识别,从而实现车辆的自适应控制。
(2)交通监控:毫米波雷达目标检测算法可以检测到道路上的车辆、行人和物体,然后向交通管理部门提供实时的数据和预警信息,以保障交通的安全有序。
(3)障碍物检测:对于道路上存在的障碍物,毫米波雷达目标检测算法可以及时检测,并向驾驶员发出预警提示,以避免事故的发生。
基于LoG斑点检测的无源毫米波图像目标识别方法
基于LoG斑点检测的无源毫米波图像目标识别方法作者:李国强刘北佳来源:《数字技术与应用》2017年第05期摘要:应用于人体安检领域的无源毫米波成像系统在实际环境应用中存在众多不可预知的噪声干扰,造成目标被淹没,因此目标识别是一关键环节。
本文提出了人体轮廓提取和LoG 斑点检测的联合算法实现了检测目标的定位,并通过最大稳定极值区域算法确定目标的轮廓。
实验仿真结果表明,此算法能准确地对毫米波成像目标进行有效识别。
关键词:无源毫米波成像;多尺度LoG算子;人体轮廓提取;MSER算法中图分类号:TP39 文献标识码:A 文章编号:1007-9416(2017)05-0102-02无源毫米波(PMMW)目标检测技术可以有效检测到与人体能量有差异的隐秘物体,在公共场所隐秘物体检测领域有着非常广阔的应用前景。
然而,由于实际环境带来的噪声干扰和PMMW本身辐射信号较弱的特点,使得传统的目标识别方法陷入了困境。
相比传统算法,本文提出了一种在去除人体轮廓图像之外的噪声干扰的基础上,应用多尺度LoG斑点检测算法确定目标物体的位置,再结合最大稳定极值区域(MSER)算法确定目标物体轮廓的新方法。
实验证明,本文提出的方法能够有效识别出隐秘在人体内部的目标物体。
1 人体外轮廓提取和背景图像去噪对人体外轮廓提取和背景图像去噪的步骤为:(1)对PMMW灰度图像进行中值滤波;(2)利用最大类间方差法(OTSU)对灰度图像进行二值化;(3)对二值图像进行闭运算,闭运算采用的算子尺度为,见图1;(4)确定图像中面积最大的闭合联通区域的边界后,填补该区域图像中的孔洞;(5)将面积最大的闭合联通区域确定为人体轮廓区域,并将人体轮廓区域之外的图像像素灰度值设置为零。
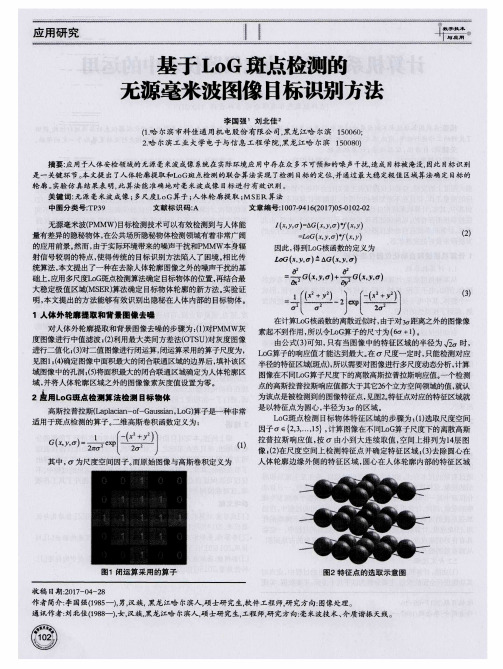
2 应用LoG斑点检测算法检测目标物体在计算LoG核函数的离散近似时,由于对距离之外的图像像素起不到作用,所以令LoG 算子的尺寸为。
由公式(3)可知,只有当图像中的特征区域的半径为时,LoG算子的响应值才能达到最大。
基于特征提取和机器学习的电磁目标识别方法

火控雷达技术Fire Contret Radar Technology第51卷第2期(总第200期)2022 年 6 月Vcl. 51 No 2( Series 200)Jun.2022基于特征提取和机器学习的电磁目标识别方法徐洪志"姚家驰2刘 超2李彩霞3蒋东翔2孙腾龙"赵新青"(1.中国人民解放军32142部队 河北保定 071000;2.清华大学 北京 100084;3.河北大学河北保定071000)摘 要:电磁目标识别在军事领域中非常重要。
为了准确识别电磁目标,本文提出一种基于特征提取和机器学习的电磁目标识别方法。
首先,通过重采样、改变幅值和信号叠加三种方法扩充电磁目 标数据库;然后,提取电磁目标的时域和频域统计特征;之后,通过主成分分析方法进行特征降维,保留前三个主成分;最后,用机器学习算法进行分类识别。
研究结果表明,本文所提出的方法能够 准确快速地识别电磁目标,在不同信噪比下的识别准确率均在98%以上。
关键词:电磁目标;特征提取;特征降维;机器学习中图分类号:TN95;TJ760;TN911文献标志码:A 文章编号:1008 -8652(2022)02 -010 -05引用格式:徐洪志,姚家驰,刘超,李彩霞,蒋东翔,孙腾龙,赵新青•基于特征提取和机器学习的电磁目标识别方法[J ].火控雷达技术,2022,51(2) :10-14.DOI : 10. 19472/j. cnkO 1008 -8652. 2022. 02. 002Electromagnetic Target Recognition Method Based onFeatrrr Extraction and Mactine LearningXU Hongzhi 1, YAO Jiachi 2, LIU Chao 3, LI Caixia 3, JIANG Donyxiany 2, SUN Tenglony 1, ZHAO Xinqiny 1(1. Unit 32142 of PLA , Baoding , Heibei 071000; 2. Tsinghua Universits , Beijing 100084;3. Heibei Uniaoity , Baoding , HeiOei 071000)Abstraci : Electromagnetic Wiyet ocognition is of great importance in the militwy feia. In ordeo to accuotWy idenh-f electromagnetic taryets , an electromagnetic taryei recognition method based on feature extraction and machine kaming was proposed in this papeo. Fiotty, the electromagnetic taryei databass was expanded afteo resampling ,changing amplitude values and siynat superposition ; then , the time domain and frequence domain statisticat featuresof the electromaanetic taryei were extracted ; after that, poncipat component analysis was adopted a reduce the fea- tum donension and otain t he trst thee pyncigat components. Finlly, classification and mcognitWn were oalizediheough maehcneeeaencngaegoecihm8Theeeseaeeh eesueisshowed ihaiihepeoposed meihod ean cdenictseeeeieomagneiaic taryets accumWly and quickly, and the recognition accurace is above 98% undeo dOferent signal-to-noiss ratios.Keyworls : electromaanetic taryets ; feature extraction ; feature donension reduction ; machine 161(X100引言电磁目标识别在军事领域中具有非常重要的作用,通过识别电磁目标的类型和数量能够有助于判 断敌方所使用的设备状态及人员规模,进而提前有针对性地部署相应的作战方案。
基于LoG斑点检测的无源毫米波图像目标识别方法
基于 L o G斑点检测的 无源毫米波图像 目标识别方法
李 国强 刘北佳 z
( 1 . 哈 尔滨市科佳通用机电股份有限公 司, 黑龙 江哈 尔滨 1 5 0 0 6 0
2 . 哈 尔滨 工 业 大学 电子 与信 息 工程 学院, 黑龙 江哈 尔滨 1 5 0 0 8 0 )
③
I 滓
r 五
技 术
应 用研 究
●
; a{ b
图 8由 MS E R算法检 测的 目标物体轮廓图像
为识 别出的 目标 物体所在 区域。
3结合 MS E R 算法 MW 图像中的目标物体轮廓的步骤为 : ( 1 ) 对P MMw灰
=
大稳定极值 区域( MS E R) 算法确定 目标物体轮廓 的新 方法 。 实验证 明, 本文提 出的方法能够有 效识 别出隐秘在人 体内部 的 目标 物体 。
1人体 外 轮廓 提 取 和 背 量图 像 去噪
f 一 2 ] e g p f ]
’
在计算L o G 核函数的离散近似时, 由于对 3 距离之外的图像像 对人体外 轮廓提取 和背景 图像去噪 的步骤为 : ( 1 ) 对P MMW灰 素起不到作用, 所以令L o G 算子的尺寸为( 6 + 1 ) 。 度图像 进行 中值滤波 ; ( 2 ) 利用最大类 间方差法( O T S U) 对灰度 图像 由公式( 3 ) 可知 , 只有当图像 中的特 征区域 的半径为 √ 时, 进行二值化 ; ( 3 ) 对二值 图像进行闭运算, 闭运算采用的算子尺度为 , L o G 算子 的响应值 才能达到最大 。 在 盯尺度 一定 时, 只能检测对应 见图1 ; ( 4 ) 确定图像中面积最大的闭合联通区域的边界后 , 填补该区 半径 的特征区域( 斑点) , 所以需要对图像进行多尺度动态分析, 计算 域图像 中的孔洞 ; ( 5 ) 将面积最大的闭合联通 区域确定为人体轮廓区 图像在不 同L o G 算子尺度下的离散高斯拉普拉斯响应值 。 一个检 测 域, 并将人体轮廓 区域之外 的图像像素灰度值设置为零 。 点的高斯拉普 拉斯 响应值都大于其它2 6 个立方空 间领域的值 , 就认
基于分水岭和形态学的图像特征提取方法

基于分水岭和形态学的图像特征提取方法韦皞;张光锋;娄国伟【摘要】With the ability of all-day,all-weather and strong penetration,MMW radiation has vast application prospects in fields of security inspection.A combination of the complex morphology self-adaptive filtering algo-rithm and the watershed algorithm was proposed according to the MMW radiation image gotten from security in-spection for hidden obj ects.The MMW radiation image was processed by the filtering algorithm and the feature of the pre-processed image was extracted and analyzed based on the watershed algorithm.The experiment re-sults showed that the feature of edges extraction was consistent to the real geometric characteristic of hidden ob-j ects.%毫米波的强穿透力和全天时、全天候的工作能力,使无源毫米波探测技术在安检方面具有广阔的应用前景。
针对藏匿物品所获得的毫米波辐射安检图像较差的分辨率较差和边缘模糊,提出了一种基于形态学和分水岭算法的毫米波图像特征提取方法。
该方法用复合结构形态学自适应滤波方法对毫米波辐射图像进行滤波处理,并对处理后的图像使用分水岭算法进行边缘检测和特征提取分析。
雷达图像目标特征提取方法研究

雷达图像目标特征提取方法研究雷达图像目标特征提取方法研究摘要:雷达图像目标特征提取是雷达信号处理与目标检测领域的重要问题之一。
本文对雷达图像目标特征提取的方法进行了研究。
首先,介绍了雷达图像目标特征提取的背景和意义。
然后,详细介绍了常用的目标特征提取方法,包括基于峰值搜索、基于形状的特征提取和基于纹理的特征提取等。
接着,针对不同方法的优缺点进行了分析比较,并总结了目标特征提取方法的发展趋势。
最后,对未来的研究方向和挑战进行了展望。
关键词:雷达图像;目标特征提取;峰值搜索;形状特征提取;纹理特征提取1. 引言雷达图像目标特征提取是为了从雷达图像中提取目标的一些重要特征信息,用以支持雷达信号处理和目标检测。
目标特征提取是雷达图像处理领域的基础研究内容之一,具有重要的理论意义和实际应用价值。
通过对雷达图像目标特征的提取,可实现目标的分类识别、目标边界的提取、目标形态的表征等目标检测任务,为雷达系统的目标跟踪、目标识别和目标定位提供有效的支撑。
2. 目标特征提取方法2.1 峰值搜索方法峰值搜索方法是一种利用雷达图像的强度信息来定位目标的方法。
该方法通过搜索雷达图像中的亮点(即峰值),来确定目标的位置。
峰值搜索方法简单直观,适用于强度差异较大的目标,但对于强度差异较小的目标效果较差。
2.2 形状特征提取方法形状特征提取方法是通过对雷达图像目标的形状信息进行分析和提取,实现目标的检测和识别。
该方法可以从目标的边界信息、轮廓信息、几何特征等角度入手,提取目标的形状特征。
形状特征提取方法具有一定的鲁棒性和稳定性,适用于目标形状复杂、目标边缘清晰的情况。
2.3 纹理特征提取方法纹理特征提取方法是通过分析目标的纹理信息,实现目标的检测和识别。
该方法可以从目标的纹理方向、纹理频率等角度入手,提取目标的纹理特征。
纹理特征提取方法适用于目标纹理明显的情况,可以有效区分不同的目标类别。
3. 方法比较与分析从上述介绍可以看出,峰值搜索方法简单直观,适用于强度差异较大的目标,但对于强度差异较小的目标效果较差。
毫米波雷达目标检测算法
毫米波雷达目标检测算法毫米波雷达目标检测算法毫米波雷达目标检测算法是近年来人工智能领域的重要研究方向之一,目的是通过算法来实现对毫米波雷达所收集的目标数据进行分析和检测。
该算法通过测试和改善,现在已经广泛应用于汽车自动驾驶、城市安防、反恐防爆等领域。
本文将对毫米波雷达目标检测算法进行详细的步骤阐述。
1. 数据采集毫米波雷达是指波长在1~10mm之间的微波,由于其具有穿透性强、不易受环境光影响等特点,被广泛应用于目标检测。
在进行毫米波雷达目标检测之前,首先需要通过雷达进行数据的采集。
具体采集方法是通过微机进行控制、调整毫米波雷达的探测模式,并在探测模式下对目标进行数据采集。
完成数据采集后,可以得到包含目标信息的原始数据集。
2. 数据预处理毫米波雷达目标检测是通过数据分析和模型训练实现的,因此需要对原始数据进行预处理,将其转化为适合模型训练的数据。
例如,对原始数据进行滤波、坐标转换等操作,以得到目标的准确位置信息。
3. 特征提取在将目标数据输入到模型中之前,需要进行特征提取。
毫米波雷达目标检测的特征提取是指从原始数据中提取一些重要的、可表示目标属性的特征值。
例如,对目标的形状、大小、纹理等属性进行提取,形成特征向量,并用于后续的模型训练和目标检测。
4. 模型训练通过前三个步骤处理后,得到的数据可以用于训练模型。
毫米波雷达目标检测中,常用的模型有基于支持向量机、神经网络等各种算法,以及一些深度学习的算法如卷积神经网络。
利用之前提取的特征值,通过模型的学习和训练,可以有效地识别、分类和定位目标。
5. 目标检测和分析进行模型训练之后,就可以使用训练出来的模型对新的目标数据进行检测和分析。
毫米波雷达目标检测的过程是将目标数据输入到模型中,模型通过比较输入的数据与训练数据,判断其是否为目标,并进行目标定位和分类等操作。
对于模型无法识别的输入,可以进行人工干预,并加入到模型的训练数据中,以提高模型的识别率和稳定性。
一种被动毫米波图像中人体隐匿物品的检测方法
一种被动毫米波图像中人体隐匿物品的检测方法作者:穆森单海婧周锦源邱桂苹来源:《科技资讯》 2014年第36期穆森单海婧周锦源邱桂苹(航天二院七0六所北京 100854)摘要:根据被动毫米波图像的特点,需要设计一种适应并且有效的被动毫米波图像中人体隐匿危险物品的检测方法。
该文提出了一种被动毫米波图像中人体隐匿物品的检测方法,首先,对原始被动毫米波图像进行预处理,通过插值重建后,采用三次迭代增强方法进行图像增强,获取处理后的被动毫米波图像,以使被动毫米波图像目标与背景进行明显区分;然后,通过对人体是否存在进行预判断,若存在则进行人体目标检测,获取人体区域;最后,采用两次迭代分割的方法对人体区域内的隐匿物品进行检测,并对检测到的隐匿物品区域进行标记。
实验结果表明,该方法能有效地检测出被动毫米波图像中的人体隐匿物品,具有较高的准确性。
关键词:被动毫米波图像图像预处理人体检测人体隐匿物品检测中图分类号:TH74文献标识码:A文章编号:1672-3791(2014)12(c)-0202-02毫米波是指波长范围在1~10 mm之间的电磁波,其频率范围从30GHZ到300 GHZ。
毫米波成像系统分为主动和被动两种工作模式,在探测人体隐匿物体的应用中,被动毫米波成像系统占据了主要地位[1]。
被动毫米波成像系统不仅可以检测出隐藏在织物下的金属物体,还可以检测出塑料、液体、炸药等危险品,获得的信息更加详尽准确,可以大大地降低误警率。
除此之外,被动毫米波成像系统不发射电磁波,不会对人体造成任何伤害。
近年来,被动毫米波成像技术在人员安检等方面得到了越来越广泛的应用,因此完成被动毫米波图像中人体隐匿危险物品的检测具有重要的意义。
现有的人体隐匿危险物品的检测方法主要是针对微波图像[2-3]、红外图像[4]、太赫兹THz图像[5]等,所采用的物品检测算法都是根据自身图像的成像特点设计的。
在被动毫米波图像中人体隐匿危险物品的检测中,现有的物体检测算法并不适用,主要原因包括:一是被动毫米波成像技术结构复杂造价昂贵,将毫米波成像技术用于藏匿物品的探测还处于初级阶段,被动毫米波成像系统所采集到的图像较之上述几类图像,图像中的噪声和模糊现象严重,分辨率低,不能很好地反映目标场景的特性,图像达不到所要求的质量,藏匿在衣服下的物体形状模糊难以辨别;二是图像中包含的隐匿物体种类更详细,包含金属、塑料、液体、炸药等,表现在灰度图像中灰度值有高有低,亮度有明有暗,增加了检测的难度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设计与应用计算机测量与控制.2017. 25 (5)Computer Measurement & Control• 169 •
文章编号:1671 - 4598(2017)05 - 0169 -04 DOI: 10.16526/j. cnki. 11— 4762/tp. 2017. 05.047 中图分类号:TN911 文献标识码:A
基于被动毫米波图像的金属目标 特征提取方法
刘静1,张光辞\褚庆国2,郑振忠2,陈庆昌2,周璐艳1
(1.南京理工大学电子工程与光电技术学院,南京210094; 2.北京特种车辆研究所,北京100072)
摘要:针对探测金属目标时其中心难以确定的问题,提出了分割被动毫米波辐射图像过渡带的算法以精确获取其几何尺寸及特征; 通过实测金属立体目标的辐射数据矩阵进行成像,对毫米波辐射图像进行基于Canny算子的边缘检测与分析,结合金属目标辐射特性以 及天线参数分割目标边缘过渡带,计算金属目标的面积、周长并提取其中心位置;实验结果表明,该方法误差控制在9.3%以内,可以 精确提取金属目标几何特征及目标中心。关键词:被动毫米波;辐射图像;金属目标;边缘提取;中心提取Feature Extraction of Metal TargeSs Based on Millimeter
Wave Radiation Image
Liu Jing1,Zhang Guangfeng1 , Chu Qingguo2,Zheng Zhenzhong2 , Chen Qingchang2,Zhou Luyan1
(1. Nanjing University of Science and Technology,Nanjing 210094, China;
2. Beijing Institute of Special Vehicles,Beijing 100072,China)
Abstract: To solve the problem that the accurate center of metal targets in detection is difficult to extract,a method about reserving and dividing the transition zones in passive millimeter wave (PMMW) radiometric images was presented to extract the characteristics of metal targets. The radiometric data matrix of three —dimensional metal target was collected and imaged. Canny edge edge of the image and analyze the characteristics. Based on the characteristics,the perimeter and area can be calculated as well as the center. The experimental results show that the method can detect the characteristics of metal targets efficiently and exactly with error in 9. 3%.Keywords: PMMW; radiometric image; metal targets; edge extraction; center extraction
〇引言被动毫米波受气象条件影响小、穿透力强、隐蔽性高,这 些特性使得被动毫米波探测技术在民用科技和现代军事科技中 的应用日益广泛[1]。金属目标在自然环境下反射天空温度成为 “冷”目标,与“热”环境背景温差较大,在毫米波波段最高 可达二百余K。被动毫米波对金属目标的这种敏感性,使其成 为末敏弹及灵巧弹药所使用的重要探测手段之一[2]。被动毫米波图像通常具有灰度变化丰富、背景噪声复杂、 分辨率低、边缘密度大等特点,一些常见的图像边缘检测算法 在被动毫米波图像中难以满足实际需求。赵凌[3]等采用形态学 算子对毫米波辐射图像进行了边缘提取,但缺少对图像中目标 的分析;韦皞[4]等采用形态学滤波和分水岭算法对人体藏匿物 品的毫米波辐射图像进行了边缘特征提取,获得了藏匿金属目 标的边缘信息,但并未进一步对金属目标进行精确计算和分 析;赵书占[5]等采用遗传算法和Osu结合的方法计算图像分 割阈值并采用Canny算子提取目标边缘信息,但仅通过图像 本身采用阈值分割的方法会造成目标边缘信息损失,造成与实
收稿日期:2016-11-17; 修回日期:2016-12-19。基金项目:国家自然科学基金项目(61371038)注:江苏省髙校优秀 中青年教师和校长境外研修计划。作者筒介:刘静(1992 -),女,江苏扬州人,硕士研究生,主要从事 毫米波、亚毫米波成像技术方向的研究。
际目标边缘存在偏差。本文针对上述问题提出了一种金属目标 辐射图像特征提取方法,计算了目标的几何尺寸并提取其特征 中心。1 基本原理1.1金属辐射特性金属板的视在温度(天线温度近似为视在温度)由金属板 本身的辐射及金属板反射来自其它物体的辐射两部分组成。在 毫米波段,金属物体发射率接近于0,反射率接近于1,可视 为完全反射周围环境温度。室外自然环境下,金属板实测的视 在温度非常接近天空温度,可以直接引用天空温度作为金属板 的视在温度[6]。根据散射理论,在(,彡)方向观测亮度温度应为各个方 向天空辐射温度被金属板散射后的总和,辐射计天线接收的金 属板散射温度Tapt (,彡)为:
犜犃犘犜(,9)二(0狊)+ Yj (0狊)].犜勿(狊,仍)d认⑴其中:犻(0,a)为人射方向为(。,‘)散射方向为 (,,九)的微分散射系数,犻,j为相互正交的两种极化方式, T狔(,,九)为(,,九)方向的天空温度。在晴天条件下,天空辐射主要来自大气中氧和水蒸气的热 辐射。根据辐射传递理论和大气水平分层模型,天空温度T狔 (見,九)为[7]:
犜犽,狔(6狊,sec^ (2)J 0• 170 •计算机测量与控制第25卷
其中:表为天顶角,和了 U)分别为高度为%处的 大气吸收系数和热力学温度,r (0,幻为光学厚度,表达 式为:
r(0?^) = ^ kg(z)dz金属板的天线温度对比度为:()
AT犃 〇,cp)
L犜APT (d^cp) — Tapb (6,(p)^G(6,(p)dO (4)
4ttJ nT
其中:Tapt d幻为式(1)中的金属板散射温度, (心〇为背景温度,G (心为天线增益。1.2自适应Canny算子Canny算子是一个多级边缘检测算法[8],在许多图像处理
领域都有被应用。Canny算子的核心思想是采用双阈值算法检 测和连接边缘,即设置高低两个阈值,高于高阈值的点视为边 缘点保留,低于低阈值的点视为非边缘点删除,介于高低阈值 之间的点进一步检测其周围8个像素点中是否存在高于高阈值 的点,若存在则视其为边缘点,否则删除。其局限性在于人为 设定的高低阈值,可采用基于简单统计的自适应阈值选取方 法[9]来确定高低阈值,该自适应算法的阈值计算公式为:^ 犲(x,y)
T
2 X犲(狓,狔)(5)
其中K狓,y) = max{ | 犲 |, | 犲犲二 f (狓一1,y) — f (狓十 1,y)犲二 f (狓,y — 1) — f (狓,y + 1)其中:f (狓,y)为像素点灰度值,犲为水平方向灰度差, 犲为垂直方向灰度差,犲(狓,y)为水平和垂直方向的最大灰度差。2图像特征提取算法与步骤
被动毫米波图像不同于普通光学图像,其像素点的灰度值 实际上表征了该点真实亮度温度值。由于金属立体目标与背景 亮温对比度大,会在目标边缘形成一条过渡带,这实际上是天 线波束扫过目标与背景边界时亮度温度的变化引起的,故仅通 过光学图像处理的方法分割图像会影响目标探测精确性。从亮 温变化的角度分析图像才是更为真实、准确的处理方法,具体 算法如下。2.1过渡带分割算法如图1所示,辐射计天线置于高度为H处,前视角为知, 天线主波束立体角为Dm,观测位于背景上的金属立体目标。 将主波束内的立体目标和背景分解成n块小矩形平面目标, 其中目标占^块,背景占〜块,n的数目越多,则其总和越 接近于真实立体目标。由于每一小块矩形平面目标很小,所对 应天线的立体角〇Tn也很小,在很小的〇Tn范围内,目标的亮 度温度TAPTn1 d,^可近似为TapT (dn1),背景的亮度温 度Tapb„2 d,”可近似为Tapb (犜2),n块小平面目标的天 线温度叠加可得总的天线温度。实验所用辐射计天线主波束效率很高(>0.9),可忽略旁 瓣影响。当天线主波束Dm扫描到目标边缘的时候,其天线温 度 TAPE (,♦)为:
图1金属立体目标在辐射测量中的几何关系TAPE (,p = n { ^TapT ((Tn1 J G((,] +
2 ^Tapb (Tn2 ) ) G((,p)c^]} (6)n2 J °Tn
2
在分割过渡带时,式(7)给出参数a (0〈《〈1),使得过 渡带的面积S分为两部分,其中a •$属于目标,(1 一a) •$ 属于背景,即:T犃犘犈p) = a • T犃犘犜p) + (1 — a) •犜犃犘犅((,p) (7)
解得:Tape p -
]C(?p
)
Tapt (,p — Tapb (
8)
对于平面目标而言,其微元都面向正上方,辐射计主波束 范围内的金属微元亮温为其反射(,^)方向对应的天空亮 温,背景微元的亮温即为其(,”探测方向对应的亮温,式 (8)可改写为:Tape ((? p) — Tbackground ((?p)
9)Tsy (,p — Tbacgr_d p
设目标边缘是直线且均分天线波束,天线为对称天线,则 其增益函数犌(,”关于目标边缘对称式(6)可改写为:
TAPE (,p = n ^ 1^犜犃犘犜((犜2) + TAPB((Tn)^ G((,dil}
10)进一步将天空亮温和背景亮温写作微元的形式为:Tsky(,p) = n {{XTsky((Tn)^ G (,P)d〇} (11)
Tbackground C(,p) { p)dO} }12)
71 n J °Tn
将式(10)、(11)、(12)带入式(9)可解得a = 0. 5。然
而,对于不同边缘形状的物体,当天线到达其边缘时并不能视 为目标和背景均分天线波束。且立体的边缘形状会形成复杂的 辐射传播关系,尤其是造成二次反射,即天空亮温经过目标反 射后再次经过背景反射进入辐射计或天空亮温经过背景反射后 再次经过目标进入辐射计。因此,对于复杂的金属立体目标对在其过渡带分割参数并 不一样,需要经过测量给出。如图2所示,给出本文中的立体金属目标在草地、沙地、 水泥地背景下的单次测量曲线。由于该立体金属目标具有不对 称的结构,所以对该目标的横纵两个方向都进行了扫描,其 中,长轴为图3 (a)中的横向轴线,短轴为竖向轴线。从图2 (a)、(b)中可以看出8 mm波段辐射计探测该目标与背景的 最大温差达到了 130 K,辐射计扫描到金属目标后下降明显,