基于ANSYS Workbench的采摘机器人臂架模态分析
ANSYSWorkbench梁壳结构谱分析(二)模态分析

ANSYSWorkbench梁壳结构谱分析(二)模态分析ANSYS Workbench梁壳结构谱分析(二)模态分析1 概述模态分析是动力学分析基础,如响应谱分析、随机振动分析、谐响应分析等都需要在模态分析基础上进行。
模态分析简而言之就是分析模型的固有特性,包括频率、振型等。
模态分析求解出来的频率为结构的固有频率,与外界的激励没有任何关系,不管有无外界激励,结构的固有频率都是客观存在的,它只与刚度和质量有关,质量增大,固有频率降低,刚度增大,固有频率增大。
一般情况,当外界的激励频率等于固有频率时,结构抵抗变形能力小,变形很大(产生共振原因);当外界激励频率大于固有频率时,动刚度(动载荷力与位移之比)大,不容易变形;当外界激励频率小于固有频率时,动刚度主要表现为结构刚度;当外界激励频率为零时,动刚度等于静刚度。
2 模态分析该模型框架采用Beam188单元模拟,外表面采用Shell181单元模拟。
该结构的总重量为800kg,分析时将其他附件的质量均布在框架上。
边界条件为约束机柜与地面基础连接螺栓处的6个自由度(Remote Displacement)。
具体建模过程详见《ANSYS Workbench梁壳结构谱分析(一)梁壳建模》或点击下方阅读原文获取。
模态分析详细过程如下:(1)划分网格:单击【Mesh】,右键【Insert】=Sizing,设置【Scope】→【Geometry】=选取所有部件,【Definition】→【Type】→【Element Size】=20。
单击【Mesh】,右键【Generate Mesh】生成网格。
(2)边界条件:单击【Modal (B5)】,右键【Insert】→【Remote Displacement】,设置【Scope】→【Geometry】=分别选择框架4个立柱,并分别按照如下操作:【Definition】→【Define By】=Components,【X Component】=0mm,【YComponent】=0mm,【Z Component】=0mm,【X Remotion】=0°,【Y Remotion】=0°,【Z Remotion】=0°,其余默认。
基于ANSYS的采煤机摇臂有限元分析
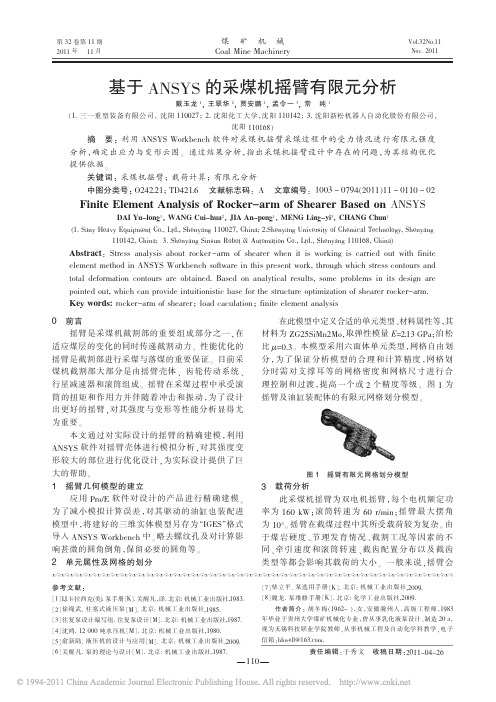
图 3 摇臂俯视应力图 图 4 摇臂仰视应力图
图 5 摇臂形变图
0.00
1 000.00(mm)
500.00
以上方法具有方便、简单、产品开发周期短、产 品开发成本低的优点,可用于指导采煤机摇臂结构
图 2 摇臂载荷与约束图
的优化设计。
5 结果与分析 通过图 3、 图 4 可以看出摇臂应力主要集中在
煤壁侧,且在法兰盘的根部及电机的根部出现较大 的应力。 因此在设计中可以适当考虑改善局部结
第 32 卷第 11 期 2011 年 11 月
煤矿机械 Coal Mine Machinery
Vol.32No.11 Nov. 2011
基于 ANSYS 的采煤机摇臂有限元分析
戴玉龙 1, 王翠华 2, 贾安鹏 1, 孟令一 3, 常 纯 1 (1. 三一重型装备有限公司, 沈阳 110027; 2. 沈阳化工大学,沈阳 110142; 3. 沈阳新松机器人自动化股份有限公司,
重介质旋流器磨损机理分析及应用 *
李 坤, 李雪斌 (安徽理工大学, 安徽 淮南 232001)
摘 要: 从磨损机理出发, 分析了旋流场内分散相颗粒的受力情况以及各种参数对磨损的影 响,提出结构优化设计方法,以期减少旋流器的磨损。
关键词: 重介质旋流器; 磨损; 分散相颗粒; 受力; 优化 中图分类号: TD455 文献标志码: B 文章编号: 1003 - 0794(2011)11 - 0111 - 03
110142, China; 3. Shenyang Sinsun Robot & Automation Co., Ltd., Shenyang 110168, China)
Abstract: Stress analysis about rocker -arm of shearer when it is working is carried out with finite element method in ANSYS Workbench software in this present work, through which stress contours and total deformation contours are obtained. Based on analytical results, some problems in its design are pointed out, which can provide intuitionistic base for the structure optimization of shearer rocker-arm. Key words: rocker-arm of shearer; load caculation; finite element analysis
基于ANSYS+Workbench的高速电主轴模态分析及其动特性实验

最高转速不能超过其一阶临界转速的75%6。本文研究电
主轴最高转速为l
2 000
将模型自动划分网格后得到主轴有限元模型,如图4
所示二
r/min,远小于一阶临界转速,故该
电主轴有效地避免了共振的发生,工作转速安全。
3模态实验
模态试验是为了确定振动系统的模态参数所进行的 振动试验,包括系统固有频率、阻尼比、振型等。模态试验 通过对给定激励的系统进行测量,得到响应信号,再应用 模态参数辨识方法得到系统的模态参数:本次实验是为了
本文所研究的电主轴为260xDJl2型车铣复合加T 中心用电主轴,如图1所示。该电主轴是新一代机、电、液 一体化的加工中心用高速精密主轴,主要由壳体、主轴、
轴承、定子和转子等零件组成,主轴材料为38CrMoAI.标 图2简化主轴转子模型 根据轴承型号口J.以查出轴承的轴向颁紧力,单个角
接触球轴承预紧后的径向刚度计算公式一为:
平压平模切机肘杆机构特性分析
张天轩,李梦群 (中北大学机械工程及自动化学院,太原030051)
摘要:用机械系统自动分析软件ADAMS建立模切机肘杆机构的虚拟样机并进行仿真分析,得出动平台的竖直方向 行程、速度、加速度以及水平方向的位移和摆动转角的特性曲线。为模切机的开发研究和设计制造提供有益的参考。 关键词:模切机;肘杆机构;ADAMS 中图分类号:TH 69 文献标志码:A
adams0引言adams软件使用交互式图形环境和零件库约束库?库创建完全参数化的机械系统几何模型其求解器采用多刚体系统动?学?论中的拉格朗日方程建立系统动?学方程对虚拟机械系统进?静?学运动我国模切机产品的技术和产业化已经达到较高的水平其主要标志体现在
制造业信息化
盔墨墨墨面墨田墨墨墨互置SZ墨仿■,毽疆,cAD,cAM,cAE,cAPP■■■■●■—●■■●■●■■■■■■■■■—————●■■■■■■—一
基于ANSYS Workbench对4MZ-3C型采棉机侧壁焊合刚度强度及模态特性的试制前有限元分析

一、引言4MZ-3C 型采棉机侧壁焊合,底部连接采棉机车体基架,顶部连接驾驶室托盘,承载着整车操控系统及驾驶人员的生命安全。
鉴于侧壁焊合可靠因素的重要性,笔者基于ANSYS Workbench 对侧壁焊合刚度强度及模态特性进行试制前的有限元分析,希望借此指导优化结构设计,缩短产品的研发周期。
二、侧壁焊合模型的刚度强度分析(一)有限元基本理论有限元法结合弹性力学的几何方程、物理方程、平衡方程、边界条件,加之以基于变分法的“化整为零,集零为整”数值方法,以及借助于计算机的强大计算能力,在数天甚至于数小时内即可完成上千阶矩阵方程的求解工作,大大降低了工程人员分析复杂结构性能的工作量。
(二)创建Static Structural 分析项目,并对Engi ⁃neering Data 进行设置,参数如图1所示(结构钢材采用Q345-A )。
自SolidWorks 导入三维模型,并进行网格划分。
结合笔者计算机性能及工程实际需要,Element size 取值为5mm ,Nodes 规模控制在500万以下。
图1对Engineering Data 进行参数设置(三)边界条件及外力状况A~E 为作用的外力,已涵括加速动荷惯量冲击。
F 为自身重力。
G 为固定边界:底座和前突出部钢板固定。
基于ANSYS Workbench 对4MZ-3C 型采棉机侧壁焊合刚度强度及模态特性的试制前有限元分析■赵杜超王玉刚王永政张治卫〔山东天鹅棉业机械股份有限公司研发中心,山东济南250032〕加工技术与应用(四)方案结果Total Deformation :模型最高点悬臂处最大变形量2.9mm 。
90%的部位变形量控制在1mm 以下,符合图纸中对角线变形量不超过4mm的要求。
Equivalent Stress :在底部前端个别突兀点出现应力集中情况,可以通过增大倒圆角的办法消除。
99%的部分处于90Mpa 以下,远小于Q345-A 的屈服强度。
AnsysWorkbench自由模态及预应力模态计算

AnsysWorkbench⾃由模态及预应⼒模态计算Ansys Workbench ⾃由模态及预应⼒模态计算模态计算是研究结构振动特性必不可少的,即分析结构的固有频率和振型,同时也是进⾏其他动⼒学分析的,如瞬态动⼒学分析、谐响应分析和谱分析必不可少的。
结构固有频率只取决于系统本⾝的刚度和质量的⽐值,简单的单⾃由度弹簧质量系统的固有频率可表⽰为:m2 12 K==ππωi i f ---i ω为系统圆周频率---K 为系统刚度 ---M 为系统质量所以⼀般模态计算只需计算⽆阻尼固有频率即可,当需要谐响应分析联合计算考虑振动值时,需考虑阻尼的影响,下⾯利⽤Ansys Workbench 有限元计算软件求解结构⾃由模态和有预应⼒模态。
⼀、结构⾃由模态计算1、打开软件,进⼊Ansys Workbench 操作平台,下图⽰,选中左侧Modal 模块,双击或者⿏标左键按住拖动⾄右侧空⽩处2、双击Engineering Date,编辑材料,如下图所⽰点击左上⾓Engineering Date Sources出现材料库⽂件夹,选择其中⼀种(此处选择General Materials),下⾯出现该材料库中包含材料名称,点击后⾯按钮,此时材料即可使⽤(此处选择Aluminum Alloy)再次点击Engineering Date Sources即可退回下图,点左上⾓Engineering Date关闭按钮3、CAD导⼊或者直接建⽴模型,此处直接导⼊solidworks建⽴好的模型右键Geometry---Browse弹出选择对话框,选择你所需的模型(若Ansys worbench软件没有与CAD软件关联,可先将模型转化成中间格式)4、双击Geometry,进⼊界⾯选中Import1,右键⽣成模型,或者直接按F5⽣成检查⽣成模型,如⽆问题关闭该模块5、退出⾄操作平台后,双击Modal,进⼊设置界⾯点击Geometry下part1,在下⽅出现的Details of part1中的Material---Assignment,选择前⾯增加的材料Aluminum Alloy划分⽹格,如下图所⽰,mesh—insert—sizing选择右侧模型,点击Apply,设置Element Size为3右键选择mesh,⽣成⽹格(generate Mesh)6、选择模型树中Analysis Settings—options--Max modes to Find改成30(设置所求模态阶数为30,可根据需求设置),其余保持默认7、右键solution—solve,进⾏求解8、⾃由模态求解完成,点击solution,右侧出现所求30阶模态频率(三维模型有6个⾃由度,且都没有约束,所以前6阶⼏乎为0,可不考虑)9、查看某阶频率振型,选中该阶频率,右键单击,选中create Mode shape Results左侧模型树下出现Total Deformation—Evaluate All Results意义,若想计算真实振动位移值,需进⾏其他动⼒学分析,如谐响应分析)⼆、预应⼒模态计算条件:杯⼦上沿增加⼀个0.1Mpa压⼒,底部固定,计算其模态1、在模态分析之前,增加⼀个结构静⼒学计算模块Static Structual,导⼊模型和材料与前⾯⼀致2、将静⼒学计算结果导⼊模态分析模块中,如下图⽰右键Static Structual下Solution—Transfer Date New---Modal3、建⽴了⼀个与Static Structual关联的模态计算模块,双击Static Structual模块下的Model 进⼊载荷及边界条件的设置4、材料和⽹格划分与前⾯讲述的⼀致,设置完成。
基于Ansys+Workbench的起重机吊臂结构全伸臂工况的有限元分析
全伸臂工况的有限元分析
李春风,董庆华,李少杰,郝清龙 ,王宇飞,曹
(承德石油高等专科学校工业技术中心,河北
硕
承德067000)
摘要:通过吊臂吊载,起重机能够实现大高度、大幅度的作业,吊臂是起重机的最主要承载构件之一,吊臂的 分析研究对于起重机的结构优化起到了大的作用。以50 t起重机吊臂为例,借助软件Ansy。w。,kbench对吊 臂结构的全伸臂工况进行有限元分析,得到其变幅平面内各处位移和应力,为结构的改进和优化提供了一定
的参考。
关键词:吊臂;Ansys Workbench;有限元
中图分类号:TH21 文献标识码:A 文章编号:1008.9446(2016)02-0017-05
Finite Element Analysis of Crane Boom Device in Full Arm Condition Based
吊臂工作原理、结构尺寸及其受力分析
1.1吊臂工作原理 起重机升降重物,是利用吊臂顶端的滑轮组支撑卷扬钢丝绳来悬挂重物,利用吊臂的长度和倾角的 变化来改变工作半径和起升的高度,如图1所示。吊臂有两节、三节、四节、五节等不同形式,通过变幅
机构来实现俯仰功能,如图2所示。起重臂顶端可以加滑轮,实现吊钩单倍率工作,提高工作速度。另
位移。 2.3后处理
Ansys
Workbench的后处理中Geometry按钮控制云图的显示方法,共有四个可用选项:Exterior是默
认的显示方式并且是常用的方式,IsoSuffaces对于显示相同的值域是非常有用的,Capped IsoSurfaces是 指删除了模型的一部分后的显示结果,删除的部分是可变的,高于或者低于某个指定值的部分被删除,
农业采摘机器人机械臂结构设计与分析

通过对测试数据的分析和评估,可以总结出机械臂的优劣势以及需要改进的 方向。例如,如果机械臂的抓取精度较高但移动速度较慢,可能需要优化其传动 系统以提高移动速度;如果机械臂的移动速度较快但抓取精度较低,可能需要改 进其末端执行器设计以提高抓取精度。
四、结论
农业采摘机器人机械臂结构设计与分析是提高采摘效率和精度的关键。本次 演示通过对机械臂结构、运动原理、性能测试等方面的详细阐述,强调了农业采 摘机器人机械臂的重要性和应用前景。为了进一步优化机械臂性能,未来的研究 应以下几个方面:1)改进传动系统设计以提高移动速度和抓取精度;2)研发更 高效的末端执行器以提高采摘效率;3)
结合机器视觉和技术实现对不同形状、大小、颜色的果实自动识别和抓取; 4)完善机械臂的自我保护和故障诊断功能以提高其可靠性和耐用性。通过对这 些方向的深入研究,有望为农业采摘机器人的进一步发展提供有力支持。
参考内容
随着科技的飞速发展,农业采摘机器人已成为现代农业的重要组成部分。本 次演示将聚焦于农业采摘机器人的核心部件——机械臂,探讨其结构设计的关键 因素,以及未来的发展趋势和挑战。
3、机械臂结构设计的未来发展 趋势和挑战
未来,机械臂结构设计将朝着轻质、高强度、多功能、人性化和环保等方向 发展。在材料选用上,将更多地采用高性能轻质材料,如碳纤维复合材料和铝合 金等;在结构设计上,将更加注重人体工学和空间利用率的提高;在功能上,将 更多地引入多种传感器和执行器,提高机械臂的感知能力和动作精度;在人性化 设计上,将更加注重用户体验和操作便捷性;在环保方面,将更多地采用节能环 保材料和方法,降低机械臂的生整体结构需根据采摘对象和作业环境进行设计。一般而言,机械臂 应具备大范围的运动能力,以覆盖广阔的采摘区域。同时,为了方便操作和维护, 机械臂结构应简洁、易于拆卸。
基于ANSYS Workbench的机械手关键部件优化

第33卷第5期2020年10月轻工机械Light tiidustrp MachineryVol.33No.5Oct.2020[研究•设计]DOI:10.3969/j.hsd.1605-2895.2020.05.076基于ANSYS Workbench的机械手关键部件优化郑洲洲,张森,张岩(青岛科技大学机电工程学院,山东青岛266061)摘要:为保证机械手在夹持工件过程中的安全性和稳定性,课题组基于ANSYS Workbevch对球形工件夹持机械手的关键部件进行了优化。
课题组对机械爪进行了静力学分析,确定了机械爪最优厚度尺寸,验证了其强度、刚度及可靠性;对传动轴进行了模态分析,求解出了传动轴的6阶固有频率和振型,以防止共振对零件造成损伤。
结果表明:模拟研究准确评估了夹持过程零件易受损伤的部位,揭示了振动的內在规律,为机械手的设计制造提供了参照。
关键词:机械手;静力学分析;模态分析;ANSYS Workbevch中图分类号:TP245.8汀H113文献标志码:A文章编号:1025-2895(2222)25-023925Structrrcl Optimization of Key Partt of ManipiUatocBased on ANSYS WortbenchZHENG Zhonzhon,ZHANG Sex,ZHANG Yax(Colleqc of ElecWomechaxicai Engineedng,Qingdac University of Scievca and Technology,Qingdac,Shandopg266961,China) Abstrcct:To ensure the safety and staPility of the manipulaton in the process of clamping the wo/pi—e,the bq parts of the sUeqdcal workpiece clamping manipulaton was optimized based on ANSYS Wo/bexch.The mechanical faw was stwicady analyzed to determine the optimal thichness of the mechanical claw and verify its strength,sdheess and aimdidty.Mohal analysis of the drive shaft was carded out,the sixth-3rkej natural faqpexce and vibration moke of the transmission shaft were solved to prevent the damape of the pad cansed by asondnce.The results show that the eln—)0pads of the clamping paocess are acchratele eveluated by simulation stuby,which reveals the law of the inderext vibration and pavibes a reference Ou the d—ijn and mannfacture of the mdnipuOtoj.Kerworpt:manipulator;static analysis;mohal analysis;ANSYS Workbench随着智能制造的发展,工业机器人的广泛运用极大地提高了劳动生产效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s h u i l y a l 2 3 @ 1 6 3 ( ' o n l
通讯 作者 :l 坫 { 健( 1 9 6 6 一 ), 男, 湖南 衡 阳人 , 副教 授 , 硕士 生导师 , ( E
1 采摘机器人臂架结构特征
采摘 机 器 人 臂 架 主臂 部 分 的 机 构 简 图如 图 1所 示 。其 为两 自由度机 构 , 即水 平 底 座 和 竖 直底 座 的直
支座安 装 面始 终 保 持 在 水 平 方 向 , 在 主臂 上 添 加 了 两
组 平行 四边 形机 构 。机器 人 臂架 的最 终 三维 实 体模 型
方案, 为臂 架 的 进 一 步 优 化 设 计 打下 基 础 。
关键词 :采摘机器人 ;臂架 ;A N S Y S Wo r k b e n c h ;模态分析
中 图分 类 号 :T P 2 4 2. 3: S 1 2 6 文 献 标 识 码 :A 文章 编 号 :1 0 0 3 — 1 8 8 X( 2 0 1 3) 1 2 — 0 0 5 6 - 0 3
制 的难 度和 节 约计 算 时 间 , 提高 机 器人 响 应 速度 。
目前 , 国 内从 事 果 品 收 获 机 械 化 方 面研 究 的
竖 直 底
科 技工 作 者 较 少 , 加上其它 种种原 因 , 研 究 水 平 与 国
外 先进 水 平 相 比 尚有 较 大 的 差 距 。本 文 针 对 目前 最 新 设计 研 制 的 林 果 采 摘 机 器 人 , 以其 臂 架 为 研 究 对 象, 利用 A N S Y S Wo r k b e n c h软 件 , 对 处 于 不 同位 姿 下 的机 器 人臂 架 进行 有 限 元 模 态 分 析 , 获得 其 固有 频 率 和振 型 , 找出臂架 薄弱环节 , 为 臂 架 的 进 一 步 优 化 设
如 图 2所示 。
线 运 动 。主臂 1总体 长 7 2 0 a r m, 中 间铰 接 头 在 其 1 : 5
的 比例 处 ; 主 臂 2长 6 0 0 am; r 主臂 3长 7 8 0 n l m, 中间 铰
接 头 同样 在 其 1 : 5的 比例 处 。 连 接 片 长 1 3 0 m m。主 臂 1 、 主臂 2和主 臂 3与连接 片 形成 平 行 四边 形 机构 。 臂 架 机构 的特 点 是 当竖 直 底 座 不 动 而 水 平 底 座 运 动
农 机 化 研 究
第 1 2期
基于 A N S Y S Wo r k b e n c h 的 采 摘 机 器 人 臂 架 模 态 分 析
杨 志敏 ,周 健 ,李 立 君 ,程 学 良
( 中南 林 业 科 技 大学 机 电工 程学 院 ,长 沙 摘 4 1 0 0 0 4 )
要 : 介 绍 了 采摘 机 器 人 臂架 的结 构 特 征 ; 为 提 高 林 果 的 采 收 效 率 , 使 采 摘 机 器 人 具 有 更 合 理 的结 构 和 动
农 机 化 研 究
学工业 出版社 , 2 0 1 1
第 1 2期
李滨城 , 徐超 . 机械原理 MA T L A B辅助 分析 [ M] . 北京 : 化
Ki n e ma ic t An a l y s i s o f S e v e n- r o d Pl a n in t g Me c ha n i s m o f
S e e d l i ng Tr a n s p l a n t e r
—
图 2 采 摘 机器 人 臂 架 模 型
F i g . 2 T h e mo d e l o f h a r v e s t i n g r o b o t a r m
ma i z l h o u c x l 8 9 @ 1 6 3. e o m,
2 0 1 3年 1 2月
计 打下 基 础 。
网1 米 摘 机 器 人 臂 架 机 构 简 图
F i g . 1 T h e s c h e ma t i c d i a g r a m o f h a r v e s t i n g r o b o t a r l f n
为 了提 高臂 架 结 构 强 度 和 稳 定 性 , 同 时 保 证 末 端
态特性 , 以模 态 分析 理 论 为基 础 , 应 用 有 限 元分 析 软 件 A N S Y S Wo r k b e n c h , 建立 了采 摘 机 器 人 臂 架 的有 限元 模 型 ;
选 取 臂 架 的 3种 典 型 位姿 , 得 出 了其 在不 同位 姿 下 的 前 6阶 固有频 率 和 振 型 , 找 出 薄弱 环节 , 提 出 了 相 应 的 改 进
0 引言
林 果 采 收 作 业 因 其 具 有 季 节 性 强 和 劳 动 强 度 大 等特 点 , 成 为林 果 生 产 过 程 中 最重 要 的 环节 。采 收所
用劳动 力 占整 个 生 产 过 程 所 用 劳 动 力 的 3 5 % ~
4 5% _ 】 j
。
位 的距 离 时 , 主 臂 3末 端 沿 竖 直 反 向运 动 5个 单 位 的 距 离 。这 样 的 结 构 特 点 能 很 好 地 降 低 机 器 人 编 程 控
一
个 单 位 的距 离 时 , 主臂 3末 端 沿 水 平 同 向运 动 6个
单 位 的距离 ; 当水 平底 座 不 动 而竖 直 底 座 运 动 1个 单
收 稿 公益性 行业 科研 专项 ( 2 0 1 1 0 4 0 9 0) ; 湖 南 省科 技