跟踪测控模型
椭球数学投影变换在监测域测点模型中的应用

1 卫星轨道平面和地球赤道平面的夹角为定值。 )
2 卫 星运行 速度是 常数 。 )
收 稿 日期 : 0 0一l o 21 0一 6
基金项 目: 兰州石化职业技术学 院科研基金( o k 9—1 2)
3 符 号 说 明
R 为地球 半 径 , =67 .5 m ; R 38 1k
射与运行过程 中 , 往往有 多个 测控站联 合完成测控任 务, 如神州七号。 我们利用模型分 析卫星或 飞船 的测控情况 , 在所
有测控站都与卫星或飞船的运行 轨道共面 的情况下讨 论 了至少应该建立 多少个测控站 才能对其进行全程跟 踪 测控 ; 如果一 个卫星或飞船 的运行轨道 与地球赤道
作者简介 : 刘建清(9 1 )女 , 17 一 , 陕西合 阳人 , 副教授, 硕士.
刘 建 清 ,椭 球 数 学投 影 变 换在 监 测 域 测 点模 型 中 的应 用
・7 ・ 5
度为 J V的球 面 s上运 行 , 虑 到地 球 自转 时该 卫 星 考
4 模 型 的建 立 与 求 解
由于测控 设备 只能 观测 到所 在 点切 平面 以上 的
空 域 , 在与地 平 面夹 角 3度 的 范 围 内测 控 效 果 不 且
好, 实际 上每个 测 控站 的测 控 范 围 只考 虑 与 地 平 面 夹角 3度以上 的空域 。
1 测控 站 与星 下点 的经 度之差 △ ) 九计 算
i 为 卫 星 或飞 船 的运 行 轨道 平 面 与地 球 赤 道 平面 有 固定 的夹角 , 即轨道倾 角 ;
日 为 卫星 的高度 ;
. 为球 面 ; s
航天测控系统中双向多普勒测速误差分析

△(p:由多 普 勒 变 化 率 引 起 的 稳 态 相 位 滞 后 ; B :跟踪环路 的等效 单边 噪声带 宽 ;
:多普勒 变化 率。
r●
在△(p=10。时, >3.2√ (Hz)
测速随机误差 由载波环热噪声引入
计算公式为 :
J
k2 、/丽 —4z— Ts
图 2不 同信 噪 比对 应 的 测 速 误 差
宽 ,以满足指标要求 。
关键 词:多普勒 测速 锁相 环 接 收机 阿伦 方差 DDS
中图分 类 ̄-:TN958
文献 标识 码:A
文章 编 号:1007—9416(2016)01—0255—02
多普勒 测速是测量导弹和卫 星运行轨道的主要方法之一。它包
时钟 的短稳性 能可 以用相位 噪声来表示,相位噪声与测速方差
通过推导可得 出多普勒频率 :
r)]z】
厶 /
.
[ (r)
[ (f) ≈2 1 In2
{ 一ft.
C
f^为多普勒频率 ,ft为发射频率 。通过公式可 知,测速误差主源自分 析 与ft的误 差。
(f)
—27rZTh _
2
=__ —
一
由于 时钟短稳 引起 的测速误差可表示为 :
电离层引起的测速误差与载波频率、测控天线俯仰角和太 …
仿 真 。
动周期有 关。频率越低 ,误差越大 ;仰角越低 ,误差越大;白天的误菱
由图1可看出,环路带宽越窄测速精度越高,但动态性能会变差 。 比夜 间大 。通 常 选 用 双 频 电离层 修 正方 案 ,提 高 降低 测 速 误 差 。
括双 向多普勒测速和单向多普勒测速,双 向多普勒 测速 是航 天测控 的关系归结为 阿伦方差与相位噪声 的关系 。
【测控技术】_试验、测控与仿真_期刊发文热词逐年推荐_20140727

推荐指数 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
科研热词 推荐指数 飞行品质 1 飞机噪声 1 飞控系统 1 闭环故障仿真 1 锁相频率合成器 1 通信时延 1 转台 1 试验与评价 1 设备组成 1 视窗操作系统实时扩展 1 视景仿真 1 虚拟现实 1 虚拟技术 1 航空电子 1 综合数字仿真 1 统计能量分析 1 系统集成 1 空中目标模拟系统 1 直升机 1 电点火具 1 电子飞行仪表系统(efis) 1 电压负反馈与电流补偿 1 电动油泵 1 环路滤波器 1 液压系统 1 流量控制 1 模糊控制 1 杆操纵 1 无痕切换 1 无人机 1 数据监听 1 数据存储 1 数据分析 1 收发信机 1 技术方案 1 微型涡轮发动机 1 建模与仿真 1 实时仿真 1 地面仿真试验 1 地形跟随 1 四余度 1 四代机 1 噪声预计 1 可靠性 1 发火试验 1 发火特性 1 发火原理 1 关键技术 1 信息冗余 1 信号源仿真设备 1 余度管理 1 仿真原理 1
53 54 55 56 57 58 59
仿真 互联网 vega/creator udp can auv apinc429
1 1 1 1 1 1 1
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
基于NI实时控制器的六自由度平台测控系统设计与实现
基于NI实时控制器的六自由度平台测控系统设计与实现王效亮;张芳;曾宪科;栾婷;陈成峰【摘要】六自由度平台测控系统是六自由度平台的电气控制部分,它通过对六路液压缸的实时闭环控制,实现对平台位姿的控制;该测控系统采用NI的计算机,配置多种类型的PXI板卡,实现了对平台的电压、电流、数字IO、CAN总线等多种接口类型的测量和控制,满足了可靠性需求;采用了典型的上下位机控制,分别进行实时计算与任务管理,解决了实时性的控制需求;采用NI的虚拟仪器Labview开发测控软件,完成实时计算平台的正解与反解模块,作动器闭环控制等功能,增强系统的功能和灵活性;目前六自由度平台测控系统的硬件部分和软件部分都已经通过了调试,对系统进行了正弦运动和暂态特性测试,实验结果表明,运行速度快,满足了平台的控制要求.【期刊名称】《计算机测量与控制》【年(卷),期】2019(027)002【总页数】6页(P24-28,33)【关键词】六自由度平台;软件;SIT仿真模型【作者】王效亮;张芳;曾宪科;栾婷;陈成峰【作者单位】北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081【正文语种】中文【中图分类】TP273+.50 引言六自由度平台是一种模拟航天器空间运动姿态的模拟器,在其行程范围内可以模拟任意空间运动。
六自由度是平台具有六个自由运动的维度,即纵向、升降、横向、俯仰、横滚、偏航[1]。
通过对6个液压作动器的精确控制和解藕算法,实现对平台的6个自由度的位姿控制。
其系统示意图如图1所示。
图1 六自由度平台示意图六自由度运动平台可以实现对既定的轨迹的跟踪,作为运动仿真平台有着广泛的应用:1)可以作为航空飞行模拟器;2)可以作为机器人的模拟运动机构;3)在娱乐界可以作为体感模拟娱乐机;4)用作飞机、船舶、潜艇、航天器等运动载体中相关仪器设备的试验。
单脉冲天线角度跟踪模拟技术
单脉冲天线角度跟踪模拟技术苏勋【摘要】通过对单脉冲天线方向图数学模型的研究,提出了一种角度跟踪模拟方法.采用信标和数控衰减器组合的方式,结合VxWorks操作系统成功实现了天线主、副瓣信号的模拟,工程应用情况良好,对当前武器装备仿真模拟训练系统的研制具有重要的参考价值.【期刊名称】《电讯技术》【年(卷),期】2012(052)006【总页数】4页(P948-951)【关键词】测控系统;单脉冲天线;天线方向图;偏离角模拟;天线副瓣【作者】苏勋【作者单位】中国西南电子技术研究所,成都610036【正文语种】中文【中图分类】TN82;V556仿真模拟训练系统的研制是当前武器装备建设的重要内容,在测控领域已经引起了广泛关注。
对靶场测控系统使用的训练模拟器而言,模拟内容包括角跟踪性能模拟、距离和速度动态模拟[1-3]、遥测遥控功能模拟、数传接收解调性能模拟等多项具体内容,其中角跟踪性能的仿真模拟难度较大。
测控系统中角度捕获是关键,它关系到整个测控活动的成败。
S频段测控系统可以通过跟踪过境卫星进行角度捕获的任务演练,但对于C频段测控系统,由于没有过境的低轨卫星跟踪,测控系统缺少一种可随时对设备跟踪性能进行检查、模拟演练的环境,因此有必要研究一种角跟踪模拟设备,与测控系统的天线与接收分系统一起构成角跟踪闭环系统,通过模拟各种测控活动前的校相过程、实际捕获过程,以达到对岗位人员进行实景训练提升技能的目的。
角跟踪模拟器以射频信号源、数控衰减器、数控移相器、信号处理单元为基础构建硬件模拟环境,模拟信号从高频接收机场放输入端注入测控系统。
根据天线和路/差路信号幅度归一化数学模型进行波束跟踪信号仿真,可得到天线波束捕获目标过程中完整的和路/差路信号电平、天线偏离角、误差电压理论值等原始数据;通过天线对塔标校可获得跟踪系统的AGC-S/Υ曲线、和路与差路信号在波束内的真实幅度差值。
据此可建立天线偏离角与角误差信号之间的参数映射表,存储在信号处理单元中以备调用。
机载卫星通信天线跟踪误差分析

第54卷 第3期2021年3月通信技术Communications TechnologyVol.54 No.3Mar. 2021文献引用格式:田捷力,李麒,邓军,等.机载卫星通信天线跟踪误差分析[J].通信技术,2021,54(3):745-749.TIAN Jieli,LI Qi,DENG Jun,et al.Analyze of Tracking Error about Airborne Antenna System for theSatellite Communication[J].Communications Technology,2021,54(3):745-749.doi:10.3969/j.issn.1002-0802.2021.03.034机载卫星通信天线跟踪误差分析田捷力1,2,李 麒3,邓 军3,顾田航4,顾 新5(1.中国电子科技集团公司第三十九研究所,陕西 西安 710065;2.陕西省天线与控制技术重点实验室,陕西 西安 710065;3.解放军93216部队,北京 100085;4.西安邮电大学,陕西 西安 710121;5.西安电子科技大学,陕西 西安 710071)摘 要:随着机载卫星通信的工作频段向着宽频带和多频段拓展,Ku/Ka双频段天线已成为目前发展的主流。
双频段天线的指向跟踪方式直接影响卫星通信的性能,而天线系统各项误差可导致天线的指向精度、跟踪精度不能满足动载体快速、可靠与实时捕获卫星的需求,导致卫星链路中断,数据丢失,无法正常通信。
因此,介绍了机载Ku/Ka双频段天线系统的组成和采用的跟踪方式,分析在不同的跟踪方式下指向误差和跟踪误差的产生因素,并提出改善误差的解决方式,估算跟踪精度。
关键词:机载;天线;指向误差;跟踪误差中图分类号:TN828.5 文献标识码:A 文章编号:1002-0802(2021)-03-0745-05Analyze of Tracking Error about Airborne Antenna Systemfor the Satellite CommunicationTIAN Jieli1,2, LI Qi3, DENG Jun3, GU Tianhang4, GU Xin5(1.The 39th Research Institute of China Electronics Technology Group Corporation Xi’an Shaanxi 710065, China; 2.Shaanxi Key Laboratory of Antenna and Control Technology Xi’an Shaanxi 710065, China; 3.Unit 93216 of PLA, Beijing 100085, China;4.Xi’an University of Posts and Telecommunications, Xi’an Shaanxi 710121, China;5.Xidian University, Xi’an Shaanxi 710071, China) Abstract: When the operating frequency band used for airborne satellite communication is expanded to wideband and multiband, Ku/Ka dual-band antenna has become the mainstream. The pointing and tracking method of the dual-band antenna directly affects the performance of satellite communication. Various errors in the antenna system may cause pointing accuracy and tracking accuracy of the antenna to fail to meet the requirements of fast, reliable, and real-time satellite capture by moving carriers, resulting in interruption of the satellite link, data loss, and normal communication. Therefore, the composition of the Ku/Ka dual-band antenna, and the design ideas of tracking method and stabilization system of the antenna are introduced in the paper. The influence factors of pointing accuracy and tracking accuracy in different tracking mode are analyzed, and then the solution to improve the error is proposed.Keywords: airborne; antenna; pointing error; tracking error0 引 言卫星通信系统和测控系统按设备划分,可分为信道分系统和测角分系统。
【测控技术】_设备仿真_期刊发文热词逐年推荐_20140727

科研热词 鲁棒性 风理 线性功率放大 级联低通滤波器 硬件仿真 直接数字频率合成 目标跟踪 电能质量 测试系统 模拟训练 模拟器 无人机 数据采集 数字锁定 微弱信号检测 定静压控制 定位控制方案 多通道加载系统 多线程 多箱斗回转体 多余力 可视化平台 变风量空调系统 半物理仿真 动态神经网络 分布式结构 光电开关 信号发生器 伺服电机 不确定性 verilog pci总线接口 mⅲ总线 labwindows/cvi labview fpga creator/vega cpci afdx总线
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28
科研热词 远程监控 虚拟仪器 动态链接库 信号调理 labview clf cin 高速数据传输系统 零电压开关 虚拟软驱 聚束式高分辨成像 深空测控 成像制导 总线 嵌入式启动 多相滤波 基带处理 固定前置角制导律 合成孔径雷达导引头 全桥 信道化 xpc vlbi s函数 simplorer isl6752 ieee1394 can通信
2008年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
航天测控通信系统多业务传送设备(SMSTP)设计及实现
关键词: 测控通信系 : 统 多业务传送: 网络监控
I
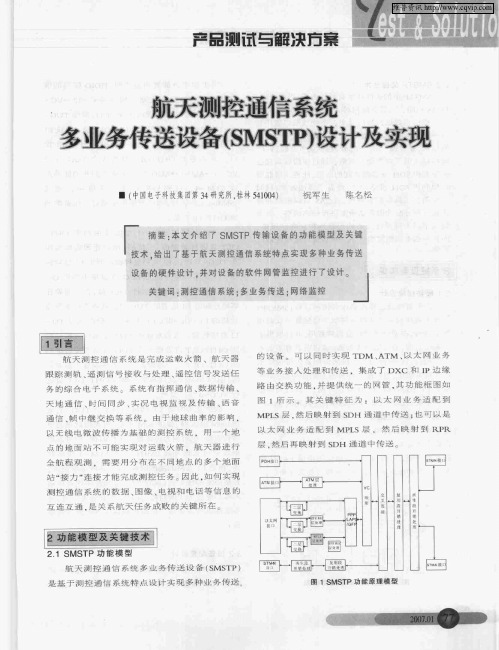
航 天 测 控 通 信 系 统 是 完 成 运 载 火 箭 、航 天 器
跟 踪 剁 轨 、 测 信 号 接 收 与 处 理 、 控 信 号 发 送 任 遥 遥
的 设 备 。 可 以 同 时 实 现 TDM 、 M 、 太 网 业 务 AT 以
当工作 于 分 插复 用方 式 时 . HDB3编 码 的 准
同步 E 1信 号 在 E 1支 路 处 理 盘 经 c一1 一 v 一 2 c
1 一 Tu一1 2 2异 步 映 射 和 指 针 处 理 后 . 经 TUG一 再
同一 通 道 减 少 了 对 带 宽 的 需 求 .支持 点 对 点和 环
路 由 交 换 功 能 . 提 供 统 一 的 网管 , 功 能 框 图 如 并 其
图 1所 示 其 关 键 特 征 为 : 以 太 网 业 务 适 配 到
M P S屡 . 后 映 射 到 S L 然 DH 通 道 中 传 送 : 可 以 是 也
以 太 同 业 务 适 配 到 M P S层 . 然 后 映 射 到 P P : L . I .L
等 业 务 接 人 处 理 和 传 送 .集 成 了 DXC 和 I 1 = 缘 )边
务 的 综 合 电子 系 统 = 系统 有 指 挥 通 信 、 据 传 输 、 数
天 地 通 信 、 间 同 步 、 况 电 视 监 视 及 传 输 、 音 时 实 晤 通 信 、 中继交 换等 系统 。由于地 球曲 率的影 响 , 帧 以 无 线 电 微 波 传 播 为 基 础 的 涮 控 系 统 . 用 一 个 地 点 的 地 面 站 不 可 能 实 现 对 运 载 火 箭 .航 天 器 进 行
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 卫星或飞船的跟踪测控模型 摘要 本文就卫星或飞船的跟踪测控问题进行了研究。在以“全程跟踪测控”为基本原则下,先分别对测控站与卫星或飞船的运行轨道共面,卫星或飞船的运行轨道与地球赤道平面有固定的夹角等不同情况,建立了相应的模型。然后运用立体几何,空间曲面分布等相关知识计算,得出合理的测控站个数。最后就神七测控站对其所能测控的范围进行了分析。
对问题一:当所有测控点都与卫星或飞船的运行轨道共面的情况下,只研究卫星或飞船进入稳定轨道之后正常运行的跟踪测控,先把卫星轨道和地球看成是两个同心圆,建立测控站个数n与卫星轨道高度H之间的模型。然后利用正弦定
理sinsinRHR求解得:最少监控站[]12n。 对问题二:当卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度一定高度运行的情况下,先分析出只需测控南纬与北纬之间的带状区域内,就可以实现对此卫星的全程测控。然后分别求解得卫星或飞船飞行的区域所
覆盖的全面积S24()sinRH,每个测控站的可观测范围面积(近似取其内
接正六边形对应的曲面面积)1332LSSp=,最后面积比并代入神舟七号飞船的相关数据得出监控站的最小个数:4sin[][]33(1cos())LSnSpqa===-45。 对问题三:首先通过互联网收集了神七的相关资料,将测控站在一定高度上的可测控区域投影到地球上,利用麦卡托投影法建立地球经度纬度的坐标系,确
定了神七各站点的方程后,用蒙特卡罗算法计算出了可测控范围为:17.3%h=。
关键词:跟踪测控 正弦定理 麦卡托投影 蒙特卡罗算法 2
1 问题重述 1.1问题背景 卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控。 测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域。在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务。
1.2问题提出 利用模型分析卫星或飞船的测控情况,解决以下问题: 1、 在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控? 2、如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H的球面S上运行。考虑到地球自转时该卫星或飞船在运行过程中相继两圈的经度有一些差异,问至少应该建立多少个测控站才能对该卫星或飞船可能飞行的区域全部覆盖以达到全程跟踪测控的目的? 3、 收集我国一个卫星或飞船的运行资料和发射时测控站点的分布信息,分析这些测控站点对该卫星所能测控的范围。
2 问题分析 本题在测控设备与地平面夹角在3度以上的条件下,前两个问着重研究以卫星和飞船的全程跟踪测控为原则时,如何建立和分布使测控站个数最少的问题。第三问在前两个问的探索模型下,通过查找资料和有关数据,计算出实际我国某一个飞船运行时,所设立的测控站的测控范围。
问题1的分析: 在所有测控站都与卫星或飞船的运行轨道共面的情况下,由于只研究卫星或飞船进入稳定轨道之后正常运行的跟踪测控,所以先把卫星轨道和地球看成是两个同心圆,不考虑地球自转等其它的因素的影响,在测控站的测控范围的边界与
地平面的夹角成3时,建立测控站个数n与卫星轨道高度H之间的模型。然后代入神舟七号飞船的相关数据,求解出至少应该建立多少个测控站才能对其进行全程跟踪测控。最后为验证求解的测控站个数的合理性,在模型的基础上,分别作椭圆轨道的近、远点到地心的距离为半径的圆检验结果。
问题2的分析: 根据题意,先分析出在地球自转等影响因素下卫星或飞船运行轨迹为星下线。星下线轨迹在地球上的投影是均匀分布在赤道的两边,即南纬与北纬之间。所以只需测控南纬与北纬之间的带状区域内,就可以实现对此卫星的全程测控。然后建立模型求解出卫星或飞船飞行的区域所覆盖的全面积,再求出每个测控站 3
的可观测范围面积,最后面积比得出监控站的最小个数。 问题3的分析: 在问题2的模型思想基础之上,通过查阅资料得知,神七是全经度的遍历运行轨迹,再将神七的飞行区域利用麦卡托投影原理展开为一个以纬度和经度为轴的坐标,对测控神七的16个站点列出其可测控范围的圆方程,最后根据蒙特卡罗原理的思路,通过编程完成对可测控范围(或有效覆盖率)的计算。
3 模型假设 1、假设地球是均匀的球体。卫星或飞船在环绕地球运动时看作质点。 2、假设测控站中的测控设备在测控过程中始终能正常工作。 3、假设测控站与卫星或飞船的运行轨道共面时,不考虑地球自转等影响因素。 4、假设只研究卫星或飞船进入稳定轨道之后正常运行的跟踪测控。 5、假设卫星在太空飞行时不受阻力、电磁波等一切外界干扰条件的影响。
4 符号说明 H:进入预定轨道运行稳定后距离地面表面高度; :卫星或飞船的运行轨道与地球赤道平面固定的夹角;
n:测控站个数;
R:地球半径; :圆心角;
S:卫星或飞船飞行的区域所覆盖的全面积;
1S:每个测控站的可观测范围面积;
LS:正六边形面积;
h:测控站点对神七所能测控的范围。
5 模型的建立与求解 5.1问题一的模型求解 在所有测控站都与卫星或飞船的运行轨道共面的情况下, 为使测控站能对其进行全程跟踪测控,现采用几何分析法建立相应模型如下: 由于只研究卫星或飞船进入稳定轨道之后正常运行的跟踪测控,现把卫星轨道和地球看成是两个同心圆,不考虑地球自转等其它的因素的影响,在测控站的
测控范围的边界与地平面的夹角成3时,建立测控站个数n与卫星轨道高度H之间的模型。 4
由题意作图1得:OA=R,OB=R+H,AOB=,OBA=,OAB==093 结合正弦定理得:sinsin2[]2RHRn (1) 图1 卫星或飞船进入稳定轨道的运动图 sinarcsinRRH 代入神舟七号飞船的相关数据:H=343(公里), 地球半径R=6371(千米)
利用Matlab计算得:71.3720o o15.6280 11.5178n 即:至少应该建立12个测控站才能对其进行全程跟踪测控。
模型检验: 由于实际上卫星或飞船的运行轨道是椭圆,为验证求解的测控站个数的合理性,所以在模型的基础上,分别作椭圆的近、远点到地心的距离为半径的圆分析讨论。 (1)以地心0为圆心,轨道近地点到地心距离H+R为半径作圆(如图2)。
由右图2可得:此圆包含在椭圆区域内。此时,监控器若能监控到周围及其他外空域,则一定能监控到椭圆及外空域。因此,可以在地球上均匀建站监控整个圆。
图2 近地点到地心为半径的运动图 同理,将近地点的相关数据:H=200(公里), 地球半径R=6371(千米)代入(1)式得:o75.5199 o
11.4801 15.6793n
即:在近地点需建立16个测控站。 (2)以地心0为圆心,轨道远地点到地心距离'H+R为半径作圆(如图3)。 5
由右图3得:对应远地点圆包含了椭圆区域。此时,只能监控到大圆周及其外空域,而不能监控整个椭圆。现在地球上均匀建站监控整个圆周。
图3 远地点到地心为半径的运动图 同理,将远地点的相关数据:H=350(公里), 地球半径R=6371(千米)代入(1)式得:o 71.1957 o
15.8043 11.3893n
即:在远地点需建立12个测控站。
即:当运行的轨道为椭圆时,要进行全程跟踪的监测站最小个数应该在12与16之间。 综上所述:所求得神舟七号飞船的测控站至少12个满足椭圆轨道对应的监测站个数范围,所以此模型合理。
5.2问题二的模型求解 当一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H的球面S上运行,考虑到地球自转时该卫星或飞船在运行过程中相继两圈的经度有一些差异,所以在地球自转等影响因素下卫星或飞船运行轨迹为星下线 由图4观察可得出:星下线轨迹在地球上的投影是均匀分布在赤道的两边,即南纬与北纬之间。所以只需测控南纬与北纬之间的带状区域内,就可以实现对此卫星的全程测控。 图形分解如下: 6
图4 卫星或飞船的运行分解图 现根据图分析求解出卫星或飞船飞行的区域所覆盖的全面积S:
2211
2222
222()12()()xxxxxSRHxdxRHdxRHx
24()sinRH (1)
对于每个测控站所能测控的范围实际上是一个圆锥形球面,在这锥形球面上可得一个最大圆,利用这个圆去截图4中卫星的飞行区域的球面,得到一个实际该站所能测控的有效测控锥形球面,我们再对此球面进行分割,近似取其内接正六边形对应的曲面为测控站的有效测控面积如下图5所示: