舰船液压起重机波浪补偿消摆控制技术研究
波浪补偿起重机原理样机液压系统故障分析与改进
1. 压 阀 1减
1. 流阀 2节
1. 3 电磁 比例 阀 l. 轮 组 6滑
1 . 向 液压 锁 4双
1 偿液压缸 5补
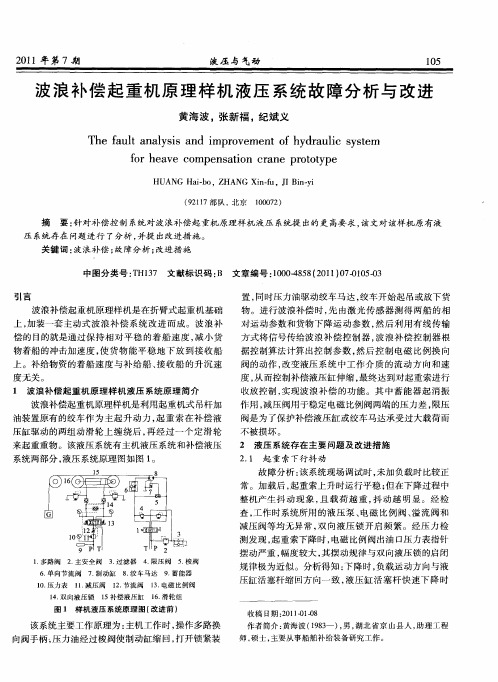
图 1 样 机 液 压 系统 原 理 图 ( 改进 前 )
收 稿 日期 :0 10 -8 2 1 -1 0
该 系统 主要工作 原理 为 : 主机工 作 时 , 操作 多路换 向阀手柄 压力 油经 过梭 阀使制 动缸缩 回 , 打开 锁紧装
故 障分 析 : 系统 现场 调试 时 , 该 未加 负载 时 比较 正
常 。加 载后 , 起重 索上 升时 运行平 稳 ; 在下 降过程 中 但
整 机产 生抖 动现 象 , 载 荷 越 重 , 动 越 明显 。经 检 且 抖 查, 工作 时 系统所用 的液 压 泵 、 磁 比例 阀 、 流 阀 和 电 溢 减 压阀 等均无 异 常 , 向液 压 锁 开启 频 繁 。经 压力 检 双 测发 现 , 重 索下 降时 , 起 电磁 比例 阀出油 口压力表 指针 摆 动严重 , 幅度 较大 , 其摆 动规律 与双 向液 压锁 的启 闭
1 多路 阀 . 2 主安 全 阀 . 3过滤器 . 4 限压 阀 . 5 梭 阀 .
6 单 向节流阀 .
l 力 表 0压
7 制动缸 .
8 绞车马达 .
ห้องสมุดไป่ตู้
9 蓄能器 .
规 律极 为近似 。分析 得知 : 降时 , 下 负载运 动方 向与液 压缸 活塞 杆缩 回方 向一 致 , 压 缸 活塞 杆 快 速下 降 时 液
物 。进行 波 浪补偿 时 , 由激 光 传 感器 测 得 两船 的相 先 对运 动参 数 和货物 下 降运 动 参数 , 然后 利 用 有 线传 输 方式 将信 号传 给波 浪补 偿 控 制器 , 浪补 偿 控 制器 根 波 据控制 算 法计算 出控 制参 数 , 然后 控 制 电磁 比例 换 向
波浪补偿技术在深海采矿工程中的研究与应用

波浪补偿技术在深海采矿工程中的研究与应用摘要:国际海底采矿工程蓬勃兴起,成为各个国家重点发展的战略领域,有望解决困扰各国经济发展的陆上稀有金属资源不足的难题。
在深海采矿过程中,波浪会导致采矿船产生升沉运动,使得输矿立管承受升沉方向冲击力,使输矿立管连接处产生疲劳损害,破坏密封,造成泄漏或输矿立管连接处变形、破裂。
升沉运动会造成输矿立管底部相对海底发生较大的位移变化,影响采矿软管的悬链形态,最终影响采矿车的运动范围。
升沉运动也会使输矿立管对船体造成冲击,损害输矿立管和船体连接结构件安全性能。
为保障深海采矿长时间作业安全和高海情作业安全,必须采用波浪补偿系统对水下输矿立管的升沉运动进行补偿,使得水下输矿立管系统与海底保持相对静止状态,使得输矿立管底部被采矿车横向牵扯时,顶部可以进行弹性保护,保障深海采矿全系统作业安全、稳定。
关键词:波浪补偿技术;深海采矿工程;应用;引言矿产资源作为支撑国家发展进程的重要物质基础,影响着我国90%以上能源供应及80%以上工业原料供给。
随着数据信息技术、高端装备制造等新兴产业的快速发展,我国矿产资源需求量逐年增长,保障矿产行业持续优质发展,将成为支撑能源转型过程中国家经济全面发展的重点领域。
随着陆上矿产资源开发渐露疲态,矿产资源供应出现“两个跟不上”现象,即新增资源储量跟不上储量消耗增长速度,大宗矿产品生产供应跟不上实际消费增长速度,导致铜、铝、镍、钴、锆等矿产资源对外依存度已超过70%,矿产资源需求持续高位问题亟需寻找解决办法。
1波浪补偿液压系统海洋船舶起重机的主要功能是实现船对船和船对岸货物吊装、风电安装、海底勘探、深海潜水作业、水下作业设备的释放和回收等重要任务。
受海浪和洋流影响,起重机在作业过程中会左右摇摆或货物落地位置不准确。
此外,起重机载荷较大,在海上作业时,起重机与船舶发生碰撞,尤其是安装风电设备时,可能会造成非常严重的后果。
波浪补偿液压系统通过MRU检测船体的上下位移,并按相同比例转换成波浪的大小。
主动波浪补偿起重机控制系统设计

位置闭环和速度闭环的串联控制算法,其中位置
动补偿程序。绞车控制单元读取按钮“AHC 启动”
按下时刻,被补给船 MRU 控制箱输出的目标箱位
Δ d = d3 - d4 。
被补给船吊点处的升沉速度),计算出二次驱动元
件目标转速 v t。速度闭环以 v t 为控制目标,通过采
(3)
集二次驱动元件实际速度进行闭环控制,最终输出
位置点实时升沉位移 d1 和升沉速度 v1。
母船上的 MRU 安装在基柱中央,母船 MRU 控
中的捷联式惯性传感器不同点在于其不仅能够测
制箱根据起重机基柱高度、主臂长度、折臂长度
量船倾角度及角速度,而且内含船舶升沉数字滤
等结构尺寸,以及实时测量的回转角度、主臂角
波器,滤波器采用卡尔曼滤波等算法,能够实时
臂头部) 升沉位移 d2 和升沉速度 v2。
第37卷 第 1 期
11
技术交流
3.2
中 国 修 船
实时母船吊点升沉位移。
绞车控制单元
Δh =(ht - h0)= dt 。
操作员操作起重机,将集装箱从母船上转运
为了控制吊钩实时高度 ht 实现位移补偿,采用
到被补给船目标箱号正上方后,在需要补偿时按
下“AHC 启动”按钮,绞车控制单元开始执行主
移的闭环控制函数,f(v
为补偿速度的闭环控制
2 erv)
函数,f(d
和 f(v
都采用动态变参数 PID 算法,
1
erp)
2 erv)
板的位置不变,需要实时 (任意时刻) 控制吊钩
实时高度 ht 与初始吊钩高度 h0 的差值 Δh,和两船
以避免启动冲击和提高补偿精度。在主动波浪补偿
波浪补偿器的力伺服液压系统研究

波浪补偿器的力伺服液压系统研究
周明健;史良马
【期刊名称】《井冈山大学学报》
【年(卷),期】2014(035)004
【摘要】随着海洋资源的开发,人们对海洋工程装备的使用性能要求越来越高,如何提高海洋工程装备在使用过程中的安全性、稳定性、精确性已成为一个重要研究课题。
波浪补偿器作为海洋工程装备中重要组成部分之一,对其液压控制系统的研究显得格外重要。
本文旨在通过研究波浪补偿器的典型液压控制系统,确定波浪补偿器选择力伺服液压控制系统作为控制方案,并设计出其力伺服液压系统原理图。
该方案在减少工程装备在海洋作业过程中起吊绳索所受到交变载荷的同时,也能对被起吊货物的速度进行一定波浪补偿,从而保证了海上作业的人员和物资安全,为新型主动波浪补偿功能海洋工程装备的研发提供新的思路。
【总页数】5页(P62-66)
【作者】周明健;史良马
【作者单位】巢湖学院电子工程与电气自动化学院,安徽巢湖238000
【正文语种】中文
【中图分类】TH137.5
【相关文献】
1.力伺服波浪补偿器控制研究及其性能优化 [J], 周明健;王幼民;
2.泵直接传动式锻造液压机液压伺服控制系统研究 [J], 陈柏金;钟绍辉;靳龙;黄树
槐
3.力伺服波浪补偿吊机的液压系统研究 [J], 周明健;王幼民
4.力伺服波浪补偿器控制研究及其性能优化 [J], 周明健;王幼民
5.波浪补偿器的力伺服液压系统研究 [J], 周明健;史良马
因版权原因,仅展示原文概要,查看原文内容请购买。
船用起重机主动式升沉补偿控制的研究

船用起重机主动式升沉补偿控制的研究祝福;刘晓林【摘要】This paper studies and models ship motion and crane rising and falling motion offshore. It analyzes the principle of marine crane active rising and falling compensation control from two aspects of velocity compensation needle and displacement compensation.%对海上作业的船舶运动和起重机升沉运动进行分析、建模,从速度补偿和位移补偿两个方面分析了船舶起重机主动式升沉波浪补偿控制的原理。
【期刊名称】《船电技术》【年(卷),期】2016(036)004【总页数】4页(P30-32,36)【关键词】升沉运动;船用起重机;自由度;波浪补偿【作者】祝福;刘晓林【作者单位】武汉船舶职业技术学院,武汉430050;武汉船用电力推进装置研究所,武汉430064【正文语种】中文【中图分类】U6640 引言在海洋环境中执行运输作业离不开船用起重机,它主要用于运输转移舰船间的货物、海上物资的补给等任务。
我国海洋经济在由浅海向深海的发展过程中,深海工程起重机的需求会日益增多。
在海洋环境中,船舶受到洋流、海风和海浪的作用,便会产生升沉、纵倾和横倾方向的运动。
船用起重机在起吊作业过程中,由于船舶的晃动,被吊重物也会随着晃动,这会威胁到作业的安全。
在波浪的影响下, 海上航行的船舶会产生如图1所示的升沉、横荡、纵荡、横倾、纵倾和偏航六个自由度,其中升沉、纵倾和横倾对船舶的影响最大,要减少自由度方向运动对起重机起吊作业的影响,必须采用一种具备对由海浪引起的船舶运动姿态进行检测和控制的具有升沉补偿控制功能的波浪补偿装置。
1 海上作业船用起重机的建模1.1对船舶运动的进行假设分析在海上由于受到海浪、洋流的影响,航行的船舶因此会摇摆晃动,对起重机的工作产生影响的因素很多也很复杂,要确立船舶和流体之间准确的关系式尤为困难。
波浪补偿系统——即使惊涛骇浪也能安全高效的作业

波浪补偿系统——即使惊涛骇浪也能安全⾼效的作业...............波浪补偿系统可补偿船舶由于受到波浪的影响,造成悬吊货物的升沉运动。
在该系统的作⽤下,悬吊货物可保持相对静⽌。
“任凭风吹浪打,我⾃岿然不动”波浪补偿系统类型 · 真 · ⽐较系统类型被动式波浪补偿系统 PHC主动式波浪补偿系统 AHC Passive Heave Compensation Active Heave Compensation系统特点类似⼀种弹簧装置,保持钢丝绳张⼒⼏乎恒定补偿精度⾼:补偿精度最⾼可达95%或以上是⼀种随动的波浪补偿⽅式可进⾏能量回收:最⾼可达70%控制系统简单装机功率低补偿滞后⼤、补偿精度低控制系统要求⾼应⽤范围钻杆补偿器、钢索张紧器、隔⽔管张紧器等海⼯吊机、铺管船、多⽤途船等主动波浪补偿:先进的控制技术即使在复杂海况下,主动波浪补偿系统(AHC )也可快速响应并扩⼤吊重时可作业波⾼和风速范围,以及在恶劣⼯况下的安全操作。
博世⼒⼠乐已经成功实现直线式主动波浪补偿装置(LAHC )以及旋转式主动波浪补偿装置(RAHC )两种⽅式的应⽤,并可以根据您的实际需求和应⽤⼯况提供定制化的解决⽅案。
直线式主动波浪补偿装置(LAHC)旋转式主动波浪补偿装置(RAHC)旋转式主动式波浪补偿装置(RAHC)的组成主要有:检测元件 MRU、⼆次控制单元、控制系统、蓄能器和执⾏组件等。
⼯作时 MRU会实时监测船舶的相对运动信号,并传送到控制组件,控制组件对这些信号进⾏分析之后会产⽣⼀个执⾏信号,控制执⾏组件进⾏升沉补偿动作。
旋转式主动式波浪补偿装置(RAHC)的操作模式主要有:常规模式、主动波浪补偿模式、⾃动张⼒模式、恒张⼒模式、⾃动防松保护模式等。
货物在上升或下降过程中,不同阶段使⽤不同的操作模式,所有这些模式之间均能够实现平穏过渡切换。
博世⼒⼠乐在旋转式主动波浪补偿系统中的供货范围博世⼒⼠乐在旋转式主动波浪补偿系统(RAHC)中的配置表绞车载重/t550100250500装机功率/kW5548095023504700绞车最⼤功率/kW20018003600880017600⼆次控制单元数量26121428⼆次控制单元的排量/cc7135535510001000备注有义波⾼: ±3m;周期:9s;提升速度:30m/min;绞车最⼤功率:是在主动波浪补偿系统(AHC)模式下由升沉运动引起的最⾼速度时产⽣的。
基于模糊控制的船用起重机消摆控制
了船用 起重 机 消摆模 糊控 制器 。仿 真研 究表 明 , 该控 制器 有效 地减 轻 了载荷摆 动 ,取得 了比较 理想 的控制
效果 。 关键词 :模糊 控 制 消摆 船 用 起 重 机 文献标 识码 :A 文 章 编 号 : 1 0 .8 2( 0 0 0 .0 60 : 0 34 6 2 1 ) 50 2 .4
闭环 控 制 的船 用 起 重 机 消 摆 策 略 , 策 略 通 过 该
海 况 达 到三 级 时 ,船 用 起 重 机 作 业 将 变 得 相 当
危 险 而 不得 不停 止 工 作 ;甚 至 在 一 、 二 级 的海 况 下 ,载荷 摇 摆 也非 常 大 。等 待 合 适 的海 况进
行 作 业将 浪 费宝 贵 的 时 间和 金 钱பைடு நூலகம்。 因此 , 研 究
中 图 分 类 号 : T 2 3 .; T 1 P 7 +4 H2 8
Pe d l to d c i n Co t o fS i — o t d Cr n n u a i n Re u to n r l h p— un e a e o m
Ba e n Fuz y Co r l s do z nt o
服 由于 过程 本 身 的不 确 定 性 、不 精 确 性 及 噪 声 带 来 的 困难 , 在 处理 复 杂 系 统 的时 变 性及 非线 性 方 面 有较 大 的优 越 性 。它 依 靠 控 制专 家和 操
作 者 的经验 知 识 ,设 计 出控 制 规 则 , 再将 控 制
收 稿 日期 :2 0 .20 0 91 .9
Ab ta t A la p n uainmo e s i— u tdip ee tdi ip p rT e e d lt nrd cino sr c: d e d lt d l hp mo ne rsne t s a e h n uai u t o o f o s nh . p o e o f s i— u t s c nr l d b uz o t lte r.T ef zy c nr l r i e in d h e ep r n h mo ne i o t l yf zy c nr h oy h uz o t l S sg e .T x ei t p d oe o o e d me idc t a ec nrl r s fe t et era ela p n uain. n iae t th o t l ci d ce s d e d lt sh t o e ie v o o o
船用起重机消摆系统的专家PID控制
摘要 : 研究船用起 吊机转动优化控制 , 针对船用起重机在进行海上补给作业时 , 由于船体本身的运动 、 给速度 的变化 、 浪 补 风 的影响等会导致载荷摇摆 。为 了将载荷摇摆消减 到可 吊装 的程度 , 使船用 起重机能够在 比较恶劣 的海况 下作业 , 出将 专 提 家 PD控制应用到船用起重机 的消摆控制 中, I 设计 了船用起 重机 消摆专家 PD控制器 。专家 PD控制 的实质是基于受控对 I I
Ex e tPI Co t o fS p —M o t d Cr ne p r D n r lo hi — un e a Pe ul to du to se nd a i n Re c i n Sy tm
YANG —q u S Li i , ONG —z o g Li h n 2
W s d t e i o t l r T e e p rme tr s l e n tae t a e p y o d p n u ain d c e s s b e s a u e o d sg c nr l . h x e n oe i n e u t d mo sr t h t t a l a e d lt e r a e y 3 d - s h o g e s n t r c s t e rf r n e s e d c r e h e e p r I c n rlo t i sg o o to f c . r e ,a d i ta k h ee e c p e u v .T x e P D o t b an o d c nr l f t t o ee KEYW ORDS:E p a c n r l e d lt n;S i x e o to ;P n u a i o hp—m u t r e ala one ca ;Py d d n o
219467652_波浪补偿技术在深海采矿工程中的研究与应用
波浪补偿技术在深海采矿工程中的研究与应用①余德泉,季建刚,夏 魁,夏海红,黄田忠,陶 俊(上海船舶设备研究所,上海 200031)摘要 阐述了波浪补偿技术研究在深海采矿工程中的重要意义;开展了波浪补偿装置总体方案㊁工作原理和工作流程研究,保证输矿立管在作业过程中可以获得支持力和补偿力,相对海底保持静止位置稳定工作;通过仿真分析方法研究波浪补偿系统的动态综合性能,归纳采矿船船舶振动周期㊁负载大小㊁液压管路流阻㊁摩擦力等因素对补偿效果的影响规律;分析限速安全技术,研究限速安全阀的功能原理㊁结构组成㊁试验方案;通过装船应用验证了安全保障效果,最终形成了深海采矿波浪补偿技术较为全面的研究成果㊂关键词 波浪补偿;限速安全阀;闭环反馈;阻尼特性中图分类号:P 744 文献标志码:A 文章编号:20957297(2023)013109d o i :10.12087/oe e t .2095-7297.2023.02.21R e s e a r c h a n d A p p l i c a t i o n o f H e a v e C o m pe n s a t i o n T e c h n o l o g y i n D e e p -S e a M i n i n g E n g i n e e r i n gY U D e q u a n ,J I J i a n g a n g ,X I A K u i ,X I A H a i h o n g ,H U A N G T i a n z h o n g,T A O J u n (S h a n g h a i M a r i n e E q u i p m e n t R e s e a r c h I n s t i t u t e ,S h a n gh a i 200031,C h i n a )A b s t r a c t I n t h i s p a p e r ,t h e s i g n i f i c a n c e o f t h e r e s e a r c h o n h e a v e c o m p e n s a t i o n t e c h n o l o g y i n d e e p -s e a m i n i n ge n g i n e e r i n g i s d e s c r i b e d ,a n d t h e o v e r a l l p l a n ,w o r k i n g p r i n c i p l e a s w e l l a s w o r kf l o w o f t h e h e a v e c o m pe n s a t o r a r e s t u d i e d t h a t e n s u r e s t h a t t h e l if t i ng p i p e c a n o b t a i n th e s u p p o r ti n g f o r c e a n d c o m p e n s a t i o n f o r c e d u r i n g o pe r a t i o n ,m a i n t a i n a s t a t i o n a r y p o s i t i o n r e l a t i v e t o t h e s e a b e d a n d w o r k s t e a d i l y .T h r o u g h t h e s i m u l a t i o n a n a l ys i s m e t h o d ,t h e d y n a m i c c o m p r e h e n s i v e p e r f o r m a n c e o f t h e h e a v e c o m p e n s a t i o n s ys t e m i s s t u d i e d .T h e i n f l u e n c e l a w o f v i b r a t i o n p e r i o d ,l o a d s i z e ,h y d r a u l i c l i n e f l o w r e s i s t a n c e ,f r i c t i o n a n d o t h e r f a c t o r s o f t h e m i n i n g s h i p s o n t h e c o m pe n s a t i o n ef f e c t i s a l s o s u m m a r i z e d .I n a d d i t i o n ,t h e s p e e d -l i m i t e d s a f e t y t e c h n o l og y i s a n a l yz e d ,w h i l e t h e f u n c t i o n a l p r i n c i p l e ,s t r u c t u r a l c o m p o s i t i o n a n d t e s t p l a n o f t h e s p e e d -l i m i t e d s h u t o f f v a l v e a r e s t u d i e d .T h e s a f e t y gu a r a n t e e e f f e c t i s v e r i f i e d b y t h e s h i p m e n t a p p l i c a t i o n s .A s a r e s u l t ,a m o r e c o m pr e h e n s i v e r e s e a r c h r e s u l t o n t h e h e a v e c o m p e n s a t i o n t e c h n o l o g y i n d e e p -s e a m i n i n gi s o b t a i n e d .K e y wo r d s h e a v e c o m p e n s a t i o n ;s p e e d -l i m i t e d s h u t o f f v a l v e ;c l o s e d -l o o p f e e d b a c k ;d a m p i n g c h a r a c t e r i s t i c 0 引 言国际海底采矿工程蓬勃兴起,成为各个国家重点发展的战略领域,有望解决困扰各国经济发展的陆上稀有金属资源不足的难题[1]㊂在深海采矿过程中,波浪会导致采矿船产生升沉运动,使得输矿立管承受升沉方向冲击力,使输矿立管连接处产生疲劳损害,破坏密封,造成泄漏或输矿立管连接处变形㊁破裂㊂升沉运动会造成输矿立管底部相对海底发生较大的位移变化,影响采矿软管的悬链形态,最终影响采矿车的运动范围㊂升沉运动也会使输矿立管对船体造成冲击,损害输矿立管和船体连①基金项目:平台设计开发及核心系统设备关键技术研究(202102Z)㊂作者简介:余德泉(1969 ),男,博士,研究员,硕士生导师,主要从事深海采矿与海工装备方面的研究㊂E -m a i l :y u d e q118@163.c o m ㊂第10卷 第2期2023年6月海洋工程装备与技术O C E A N E N G I N E E R I N G E Q U I P M E N T A N D T E C H N O L O G YV o l .10,N o .2J u n .,2023㊃132㊃海洋工程装备与技术第10卷接结构件安全性能㊂为保障深海采矿长时间作业安全和高海情作业安全,必须采用波浪补偿系统对水下输矿立管的升沉运动进行补偿,使得水下输矿立管系统与海底保持相对静止状态,使得输矿立管底部被采矿车横向牵扯时,顶部可以进行弹性保护,保障深海采矿全系统作业安全㊁稳定[2]㊂为保证深海采矿作业的正常进行,减小扬矿管的纵向振动,尤其是要防止共振,尽可能地减小扬矿管的轴向变形和应力,防止其疲劳损坏,本文提出一种波浪补偿装置,安装在在输矿立管和船体之间,用于消除主要激振源,从而达到减小甚至消除扬矿管的纵向振动,尽可能减小扬矿管的轴向应力和轴向变形的目的㊂本文研究了波浪补偿装置总体关键技术㊂首先,根据高海情海况要求,确定深海采矿工况,完成总体结构研究和集成控制技术研究,形成了高海情工况下研究方案;进行位移补偿㊁受力补偿㊁减振补偿功能仿真分析,验证了研究方案,获得了深海采矿波浪补偿装置总体技术较为全面的研究成果㊂系统总体模型如图1所示㊂图1 深海采矿波浪补偿系统总体模型F i g .1 O v e r a l l m o d e l o f h e a v e c o m p e n s a t i o n s y s t e m i n d e e p s e a m i n i n g1 深海采矿波浪补偿技术总体方案研究1.1 系统工作原理研究波浪补偿装置由油缸系统㊁空气系统㊁电控系统等组成,如图2所示㊂波浪补偿系统可以通过油缸系统的油缸活塞杆上下运动,为输矿立管提供垂向支撑力和波浪补偿力,以控制输矿立管的受力和位移;并能在船舶或采矿船作垂直运动的情况下,使输矿立管的张力基本保持恒定,不致使其出现撞击㊁弯曲㊁扭转等损坏㊂图2 深海采矿波浪补偿分系统组成F i g .2 S y s t e m c o m p o s i t i o n o f h e a v e c o m p e n s a t i o n s u b -s y s t e m i n d e e p s e a m i n i n g第2期余德泉,等:波浪补偿技术在深海采矿工程中的研究与应用㊃133 ㊃工作原理如图3所示㊂当采矿船受到海浪或者潮汐的作用而产生上升运动时,蓄能器中的气体被压缩,通过气体控制阀进入空气系统,液压缸活塞杆向下运动补偿采矿船向上运动;当采矿船受到海浪或者潮汐的作用而产生下降运动时,蓄能器中的气体体积增大,空气系统通过气体控制阀向蓄能器的空气腔输入压缩空气,液压缸活塞杆向上运动补偿采矿船向上运动㊂综上所述,输矿立管不因为海浪或者潮汐的作用而影响正常工作,并能相对海床保持静止位置㊂其工作位置为:图3 波浪补偿装置工作原理图F i g .3 W o r k i n g p r i n c i p l e d i a g r a m o f h e a v e c o m pe n s a t o r (1)低位:活塞杆和动滑轮位于行程最低位置,释放钢丝绳,输矿立管向下方做相对运动,气体容积变小,油液由缸体进入蓄能器㊂(2)高位:活塞杆和动滑轮位于行程最高位置,回收钢丝绳,输矿立管向上方做相对运动,气体容积变大,油液由蓄能器进入缸体㊂(3)中位:活塞杆和动滑轮位于行程中间位置,输矿立管补偿速度最大㊂低位和高位以中位为中点㊂如图4所示,本文设计8根张紧油缸,围绕月池相对两根对称分布,竖直安装在工作甲板面,通过支撑台架固定㊂钢丝绳一端连接在输矿立管的张紧环上,通过月池上边的定滑轮导向,进入张紧油缸的下滑轮,再通过钢丝绳的上滑轮缠绕,最后回到下滑轮死绳固定端㊂其布置形式较为灵活,8根张紧油缸可以根据甲板面的布置需求,沿着对称线方向同步移动至最佳位置,确定最终布置位置㊂㊃134㊃海洋工程装备与技术第10卷图4深海采矿波浪补偿系统布置图F i g.4 A r r a n g e m e n t p l a n o f h e a v e c o m p e n s a t i o n s y s t e mi n d e e p s e a m i n i n g 1.2深海采矿波浪补偿工作模式研究波浪补偿系统工作流程如图5所示㊂在深海采矿常规工作中,补偿补偿装置采用波浪补偿工作模式㊂该模式必须保持波浪补偿器正常补偿工况,如图6所示㊂应急(限速安全)工作模式用于钢丝绳或输矿立管突然断裂时,保证设备和人员安全,如图7所示㊂快速切断动力来源,控制冲击力带来的冲击载荷影响㊂2深海采矿波浪补偿全系统动态性能仿真分析技术根据深海采矿工程输矿立管系统的工矿要求和环境条件要求,通过A M E s i m仿真软件,对波浪补偿装置建模仿真分析㊂为了更好研究各因素对补偿效果的影响,采用单一因素变量法,分别研究采矿船船舶振动周期㊁补偿油缸负载大小㊁液压管路流阻大小㊁摩擦力大小对补偿效果的影响㊂图5波浪补偿系统工作流程图F i g.5F l o w c h a r t o f h e a v e c o m p e n s a t i o n s y s t em图6波浪补偿装置正常工作模式F i g.6 N o r m a l o p e r a t i n g m o d e o f h e a v e c o m p e n s a t o r第2期余德泉,等:波浪补偿技术在深海采矿工程中的研究与应用㊃135 ㊃图7 波浪补偿装置应急工作模式F i g .7 E m e r g e n c y o p e r a t i n g m o d e o f h e a v e c o m pe n s a t o r 为了研究采矿船振幅变化对补偿效果的影响,通过仿真分析,得到不同振幅采矿船运动下输矿立管位移曲线㊂如图8所示,振幅减小时,补偿率有逐渐增大的趋势㊂这主要是因为振幅的减小使得补偿油缸气体容积变化量减小;在气体总容积一定的情况下,气体体积变化产生的负载变化值减小,从而补偿油缸活塞杆负载减小,输矿立管位移得到更好的控制㊂为了研究负载变化对补偿效果的影响,保持采矿船运动振幅等特性不变,输入不同的负载大小进行仿真技术㊂仿真结果如图9所示㊂随着负载的增加,输矿立管位移有减小的趋势,但幅度不大,补偿效果提升约6%㊂这主要是因为负载的增大,即补偿油缸气体压力和工艺缸气体压力的增大,使得气弹簧的刚度增大,气液缸频响增大,能更快地跟随外界输入,减小了输矿立管运动幅度㊂图8 输矿立管振幅位移曲线F i g .8 A m p l i t u d e d i s p l a c e m e n t c u r v e o f l i f t i n g p i pe㊃136㊃海洋工程装备与技术第10卷图9 输矿立管负载位移曲线F i g .9 L o a d d i s p l a c e m e n t c u r v e o f l i f t i n g p i pe 为了研究装置运动摩擦力对于补偿效果的影响,进行仿真计算,得到输矿立管对应的位移变化曲线㊂在图10所示摩擦力变化范围内,输矿立管位移曲线振幅差异较小,补偿效果较差㊂这主要是由于此种工况下,补偿油缸活塞杆负载较大,使得伺服阀前后压差较小,系统流量低,不能满足跟随海浪所需流量,因此输矿立管运动幅度较大㊂图10 输矿立管摩擦力位移曲线F i g .10 F r i c t i o n d i s p l a c e m e n t c u r v e o f l i f t i n g p i pe 为了研究液压管路液阻对补偿效果的影响,改变液压管路管径大小来改变液压管路液阻,管路管径分别取250m m ㊁200m m ㊁150m m ㊁100m m ,仿真结果如图11所示㊂显然,管径大小对输矿立管位移影响较大㊂管径减小时,输矿立管位移振幅有增大的趋势,但增幅较小;当管径进一步减小时,补偿油缸负载依然能达到最大㊂因此,对系统流量影响较小,因而对输矿立管位移振幅改变较小㊂第2期余德泉,等:波浪补偿技术在深海采矿工程中的研究与应用㊃137 ㊃图11 输矿立管管径位移曲线F i g .11 P i p e d i a m e t e r d i s p l a c e m e n t c u r v e o f l i f t i n g p i pe 3 深海采矿波浪补偿限速安全技术深海采矿波浪补偿系统优良的安全性对于设备及操作人员的安全至关重要㊂在海上作业时,波浪补偿系统承担数千米重载输矿立管动态负载的支持㊁补偿㊂若输矿立管突然断裂造成波浪补偿系统负载消失,使得波浪补偿承载设备运动部件突然加速,在短时间内达到高速,形成不可控的巨大冲击力,有可能造成机毁人亡的重特大事故[3]㊂因此,必须研究在这种极限工况下,通过先进电控闭环反馈控制技术[4],实现波浪补偿运动承载部件动力源快速自动关闭功能,确保系统的安全㊂限速安全阀是深海采矿水面支持系统的重要元器件,是一类安全保护装置,可在大负载快速运动装备发生故障前快速切断系统油路,降低承载运动部件的速度至安全范围,保护系统安全[5]㊂限速安全阀反应灵敏度高,切断快速可靠,使用安全性高,技术难度大㊂本文针对限速安全阀应急工况性能分析技术㊁快速响应技术㊁结构设计技术㊁试验验证技术等方面开展研究㊂通过对波浪补偿装置的极限工况分析,分析限速安全阀的安全响应与控制边界条件,确定系统的总体技术指标㊂重点研究总体要求的冲顶时间㊁油路流量㊁工作压力,并据此提出了对限速安全阀的性能要求,如切断时间㊁切断流量㊁工作压力等,根据限速安全阀的性能要求,通过对各组成部分的指标分配,为后续各组成部分的设计工作提供基础和设计要求㊂针对工作流程开展研究㊂当输矿立管突然断裂㊁负载突然降低时,通过先进电控闭环反馈控制技术,实现快速自动关闭功能,如图12所示㊂根据传感器获取的补偿负载力突然消失信息,选择相关的阈值控制,使得控制系统自动响应,控制限速安全阀先导控制阀㊂研究其本身特性,研究其对限速安全阀快速关闭功能的影响㊂在不影响先导流量情况下减小阀芯惯性㊁阀芯与阀套间摩擦力等对主阀动作的影响㊂在控制过程中,控制限速安全阀本身的电控响应阈值,当负载变化信息超过该阈值时,主阀会自动切断㊂研究阈值最优化参数,太大㊃138㊃海洋工程装备与技术第10卷会影响主阀快速响应性能,太小会导致主阀频繁的开启和关闭㊂通过较大通径的控制阀对小通径先导阀控制流量进行放大,控制主阀的关闭,提高关闭速度,大大减少主阀关闭时间,全面提升限速安全阀的核心控制性能㊂图12 限速安全阀工作流程图F i g .12 F l o w c h a r t o f s pe e d -l i m i t e d s h u t of f v a l v e 针对产品结构开展研究㊂根据目标补偿装置的工作原理和限速安全阀的工作原理,分析先导阀通径㊁主阀通径㊁阻尼孔径㊁弹簧刚度㊁弹簧预压力㊁阀芯质量㊁主阀行程等主要结构参数对系统的性能影响,形成参数表或性能曲线㊂据此提出限速安全阀最优结构参数配置㊂针对已有的典型限速安全阀结构,进行静动态性能分析,并与已有产品的数据进行对比,验证限速安全阀结构设计的先进性,确保限速安全阀机械结构性能优越,适合用于波浪补偿系统工况㊂进一步研究限速安全阀结构参数对主阀快速响应性能影响,包括压力敏感阀滑阀结构㊁主阀结构形式㊁先导蓄能器容积和压力影响㊁限速安全阀内部阻尼特性等㊂最终完成限速安全阀的结构设计,如图13所示㊂针对试验方法开展研究㊂根据提出的限速安全阀最优结构参数配置,设计并生产限速安全阀样件;针对波浪补偿系统的不同工况要求,提出一种以模拟钢丝绳断裂为边界条件的新型限速安全阀试验方案;对限速安全阀的性能进行全面验证,验证所研制的限速安全阀是否达到设计指标要求㊂本文做了限速安全阀的快速切换试验,考察限速的响应时间㊁泄漏量等性能指标的影响因素,如图14所示㊂总体性能指标符合设计要求㊂图13 限速安全阀主阀结构示意图F i g .13 S t r u c t u r e d i a g r a m o f m a i n v a l v e o f s pe e d -l i m i t e d s h u t of f v a l ve图14 限速安全阀试验室试验F i g .14 L a b o r a t o r y t e s t o f s pe e d -l i m i t e d s h u t of f v a l v e 限速安全阀已在深海采矿工程中得到了应用,如图15所示㊂各项性能指标满足设计要求,相关波图15 限速安全阀装船应用F i g .15 S h i p m e n t a p p l i c a t i o n o f s pe e d -l i m i t e d s h u t of f v a l v e第2期余德泉,等:波浪补偿技术在深海采矿工程中的研究与应用㊃139㊃浪补偿系统全程支撑水下输矿立管系统输矿作业,补偿运动平稳可靠,限速安全阀反应灵敏可靠,验证了本文的研究目标㊂4结论通过上述对深海采矿波浪补偿系统工作原理㊁作业模式㊁动态性能㊁安全限速等方面的研究,初步构建了整体框架模型,分析动态性能主要影响因素,提出了限速安全模式与解决方案,可得出以下结论:①通过波浪补偿总体技术研究,集成机械㊁液压㊁空气㊁电控系统,形成深海采矿波浪补偿功能,确保深海输矿立管系统在采矿工作中相对海底保持静止㊂②船船舶振动周期㊁补偿油缸负载㊁液压管路流阻㊁摩擦力等对波浪补偿效果的影响具有规律性,可以用以指导波浪补偿系统的设计㊂③限速安全阀是保障深海采矿波浪补偿系统的安全装置,通过研究已经形成样机产品并在实际工程中得到了应用㊂本文只是针对波浪补偿装置在深海采矿立管输送系统作业支持中的应用进行了初步研究,后续将结合实际补偿工况,进一步采用计算机辅助设计和试验验证的数据,研究波浪补偿系统快速响应性能㊁限速安全阀即时响应特性等,为深海采矿作业工程化应用奠定基础㊂参考文献[1]童波,刘学勤,任铁.新型深海矿产开发模式的探讨[J].船舶, 2021,32(3):17.[2]杨高胜,陈丹东,李文豪,刘兴.基于管道水力提升式采矿系统的深海采矿船总体设计研究[J].船舶工程,2019,41(1):23 27,33.[3]H u s t e r,A n d r e a s;B e r g s t r o m,H a n s;G o s i o r,J e f f;W h i t e,D e r e k IE E E.D e s i g n a n d O p e r a t i o n a l P e r f o r m a n c e o f aS t a n d a l o n e P a s s i v e H e a v e C o m p e n s a t i o n S y s t e m f o r a W o r kC l a s s R O V[C].O C E A N S2009,2009.[4]庄佳兴,焦侬,刘彬.深海采矿综合控制系统设计与研究[J].矿业研究与开发,2022,42(7):161171.[5]陈新明.中国深海采矿技术的发展[J].矿山研究与开发,2006,(A1):4048.。
18553639_深海液压系统压力补偿器研究
深海液压系统压力补偿器研究胡浩龙" P 龙!雷" P 沈!雪" P 张万良" P!"h中国船舶科学研究中心"江苏无锡P"[$Q P%P h深海载人装备国家重点实验室"江苏无锡P"[$Q P#!!摘要!水下液压技术在深海探测(资源开发得到广泛应用$为消除海水压力对液压系统影响"提高系统效率"节省能源"液压系统一般均采用压力补偿技术$压力补偿器作为压力补偿技术的关键元件"一直以来依靠经验进行设计$本文通过系统仿真软件&U0X2J对水下液压系统进行仿真"得到了补偿器结构参数及液压系统参数对液压系统压力的影响$预充压力相同时"补偿器弹簧刚度越大"补偿器压力下降越快"与环境压差越小%补偿器内径越大"系统压力波动峰值越小%补偿器活塞质量越大"压力波动峰值越大"冲击越大%由于负载作用"油缸工作时两侧很有可能低于环境海水压力"导致系统进水"但在油缸两端增加节流阀控制油缸工作速度"可以显著提高油缸两端压力"提高系统密封可靠性$关键词!深海%液压系统%压力补偿器%&U0X2J中图分类号 +,P Z"^M-"文献标志码 &>-.-%"/3#(!"-..@"-?#&2-(.%)#"X.-81#"*--2I C-%Q78"%@B'/C7.)-&1@17);E)89""P"?S45?B2""P"X104.'B""P"31&45A78;E2789""P!"h!951-M95M O5,145*5OX,3,-)O9!,14,)"N'B5"W5-1;3'P"[$Q P"!951-%P h M4-4,R,/7-P()-4()/(*F,,?$M,-Y-11,2V,95O&,3"N'B5"W5-1;3'P"[$Q P"!951-#45.)"%/)!@8L B<G7(B<:K L<7'E2I(B I:8)E)9K2H G2L B E K'H B L28L B B D;H B7B a D E)<7(2)878L<B H)'<I BB a D E)2(7(2)8M/8 )<L B<()B E2J287(B(:B28F E'B8I B)F H B7G7(B<D<B H H'<B)8(:B:K L<7'E2I H K H(B J"2J D<)O B(:B B F F2I2B8I K)F(:B H K H(B J" D<B H H'<BI)J D B8H7(2)8(B I:8)E)9K2H I)J J)8E K'H B L28:K L<7'E2I H K H(B J H M&H7N B K B E B J B8()F D<B H H'<B I)J D B8H7(2)8(B I:8)E)9K"(:B D<B H H'<BI)J D B8H7()<:7H>B B8L B H298B L)8(:B>7H2H)F B a D B<2B8I B H M/8(:2H D7D B<" (:B H)F(G7<B&U0X2J2H'H B L()H2J'E7(B(:B'8L B<G7(B<:K L<7'E2IH K H(B J78L2(2H)>(728B L(:7((:B28F E'B8I B)F H(<'I('<7E D7<7J B(B<H)F I)J D B8H7()<78L:K L<7'E2IH K H(B J D7<7J B(B<H)8:K L<7'E2IH K H(B JMA:2E B(:B D<B E)7L289 D<B H H'<B2H(:B H7J B"(:B9<B7(B<(:B H D<289H(2F F8B H H)F(:B I)J D B8H7()<"(:B F7H(B<(:B D<B H H'<B)F(:B I)J D B8H7()< L B I<B7H B H"78L(:BH J7E E B<(:BL2F F B<B8(27E>B(G B B8(:B D<B H H'<B)F(:B(78N78L(:BB8O2<)8J B8(D<B H H'<B M+:B E7<9B<(:B288B<L27J B(B<)F(:B I)J D B8H7()<"(:B H J7E E B<(:B D B7N)F H K H(B J D<B H H'<B F E'I('7(2)8M*'B()(:B E)7L" (:B D<B H H'<B)8>)(:H2L B H)F(:B I K E28L B<2H E2N B E K()>B E)G B<(:78(:7()F(:B B8O2<)8J B8(D<B H H'<B"78L(:BG7(B< B8(B<H(:B I K E28L B<M&L L289(:B(:<)((E B O7E O B7(>)(:H2L B H)F(:B I K E28L B<()I)8(<)E(:B H D B B L)F2(I78H2982F2I78(E K 28I<B7H B(:B D<B H H'<B)8>)(:H2L B H)F2("78L2J D<)O B(:B H B7E289<B E27>2E2(K)F(:B H K H(B JM6-7+#"8.!L B B D H B7%:K L<7'E2I H K H(B J%D<B H H'<B I)J D B8H7()<%&U0X2J9!引!言随着人类的发展"陆地资源日益匮乏"而海洋覆盖地球约有Z$M Q e的表面"蕴含着丰富的生物(矿产(化学和动力资源"深海资源开发技术成为我国越来越迫切的关键技术&"'$习总书记对深海资源开发技术提出深海战略/三部曲0的规划"我国也相继开发出/蛟龙号0(/深海勇士号0等海洋探索(开发装备$液压系统拥有承载能力强(功率密度大(调速!!!作者简介)胡浩龙!"##$*#"男"硕士"助理工程师"主要从事水下液压系统相关研究工作$第!卷增刊!P$"Q年"$月海洋工程装备与技术S%0&4045/400T/4506@/,U04+&4*+0%14S?S5VW)E M!"X'D D E MS I(M"P$"Q+P "$!+海洋工程装备与技术第!卷方便等优点"在深海资源开发中得到广泛应用$对于深海液压系统"一般均采用压力补偿技术来消除海水压力对系统的影响"提高系统效率和系统可靠性&P *-'$压力补偿器是压力补偿技术的关键元件"对液压系统性能有着重要影响$国内很多学者也对压力补偿器进行了相关研究$哈尔滨工程大学孟庆鑫对深水液压动力源压力补偿器的组成及应用进行了介绍"并推导了压力补偿器工作容积计算公式"研究了弹簧预紧力对泵吸入条件的影响&['$陈建平对压力补偿原理和压力补偿器的作用(设计原则进行了介绍&!'$刘浩针对深海载人潜水器滚动膜片式压力补偿器"建立了补偿压力的数学模型"得到了补偿压力方程及波动方程"并讨论了相关参数对补偿压力的影响&R '$目前"相关学者针对压力补偿器的研究主要集中于压力补偿器的设计经验"忽略了液压系统层面分析"本文将采用仿真软件&U 0X 2J "研究液压系统整体及压力补偿器相关参数对压力补偿器的设计影响$:!压力补偿器结构与原理压力补偿器常用结构形式有皮囊式(波纹管式(橡胶膜片式(活塞式和空气弹簧式$它们的工作原理是相同的"通过弹性元件将海水与压力补偿器隔开"弹性元件在海水压力作用下发生变形"改变压力补偿器的容积大小"实现与环境压力相等&Z '$皮囊和橡胶膜片式柔性好"响应快"结构紧凑"密封效果好"在深海压力补偿器中得到广泛的应用"但是补偿容积较小"不适合大型水下液压系统$活塞式结构体积大(响应较慢(且有动密封结构"密封可靠性差"但可实现较大容积的补偿$空气弹簧式结构体积大"响应速度适中"无动密封问题(可实现大容积补偿$图"为橡胶膜片式压力补偿器的结构示意图"主要有压力补偿器壳体(滚动膜(活塞(弹簧等构!!注)"h 压力补偿器壳体!P h 滚动膜!-h 活塞![h 紧固螺钉!!h 弹簧图"!压力补偿器结构示意图成"&口连接液压系统油箱"=口与外界海水相通$海水压力通过=口作用在滚动膜P 和活塞-上"使得滚动膜P 变形和活塞-运动"减小压力补偿器左侧容积"使得压力增大"直到两侧受力平衡"并通过&口传递到液压系统油箱"使得液压系统油箱压力与海水压力相等$一般为了提高密封可靠性"设计时会增加弹簧!使得油箱压力略大于海水环境压力$;!水下液压系统仿真模型液压介质被称为液压系统的血液"对液压系统有着重要的影响$水下液压系统一个重要的故障就是随着系统运行"水进入液压系统"污染液压介质"加快液压元件失效$为了防止水进入系统"必须使得系统的各处压力均大于环境压力"使得液压油往海水中泄漏"这就对压力补偿器的特性有更高要求"包括补偿量(响应速度(压力波动特性等等$根据对压力补偿器的影响不同"水下液压系统用户一般分为对称用户和非对称用户$对称用户主要是指马达用户"输入流量和输出流量几乎相等%非对称用户主要是指油缸用户"由于有活塞杆存在"运行过程中输入流量和输出流量不相等"对压力补偿器影响较大$这里选用两个油缸用户和一个马达用户建立水下液压系统"采用软件&U 0X 2J 进行仿真研究"相应仿真模型如图P 所示"相关数学模型不详细介绍"可查相关文献$液压系统用户油缸和马达的各项参数如表"所示$仿真过程是直接考虑系统处于深海"$$$J 工作"没有考虑系统陆上和深海所处环境因素变化"所以直接忽略温度(压力露等因素对系统补偿量的需求"系统压力设计为"R U ,7"系统流量为Q $?,J 28"压力补偿器补偿量为"$?$液压系统设计需要考虑多方面因素对系统补偿量的需求"陈建平对压力补偿器补偿量设计计算进行了详细介绍"包括非对称用户油缸(油液体积压缩量(油液热膨胀量(系统泄漏量等&-'$表:!液压系统用户参数参数油缸"油缸P马达流量,+J 28]"!"$[!压力,U ,7"!"!"!补偿量,P!$增刊胡浩龙"等)深海液压系统压力补偿器研究+P ""!+!图P !水下液压系统仿真模型<!压力补偿器仿真研究-M "!压力补偿器弹簧刚度压力补偿器中设计弹簧的作用是增加一个预压力"使得压力补偿器压力略大于环境压力"也会提高系统的响应速度$为研究弹簧对压力补偿器性能的影响"搭建系统仿真模型"控制系统其他参数相同"仅改变压力补偿器弹簧刚度和弹簧行程"仿真结果如图-所示$图-!不同弹簧刚度下油箱压力曲线!!由仿真结果可知"系统初始运行时油箱压力均相等%但是在"M !H 开始"随着油缸动作"对系统补偿量增大"弹簧刚度越大的补偿器"油箱压力越小%在[M !H 时油缸开始回程"油箱压力开始回升"最终达到一个稳定值$最后系统压力稳定值有一定差别主要是补偿器摩擦力所致$从结果可知"弹簧刚度对压力补偿器压力波动峰值影响很小"但对系统最小压力有很大影响"弹簧刚度应越小越好"恒力弹簧拥有良好特性$-M P !压力补偿器结构压力补偿器结构设计不仅影响补偿器的补偿+P "P !+海洋工程装备与技术第!卷量"也对补偿器的动态特性有重要影响$这里按照设计时补偿器补偿量不变"弹簧不变"改变补偿油缸直径和补偿活塞的质量"仿真结果如图[所示$图[!不同结构特性下油箱压力曲线!!由仿真结果可知"内径增大"补偿器稳态压力减小"压力波动峰值减小$稳态压力减小主要是由于弹簧压力不变"作用面积增大$活塞质量增大"压力波动峰值增大"并且系统压力冲击增大$所以"压力补偿器设计时应尽量增大补偿器内径"减小活塞质量$-M -!多体式压力补偿器随着水下作业任务越来越多"执行机构越来越多"系统补偿量也越来越大"设计时有采用一个大型补偿器和多个小型补偿器两种方案$这里设定系统补偿量均为"$?"初始压力相同"采用一个"$?补偿器和两个相同补偿量为!?补偿器"搭建系统模型仿真研究"仿真结果如图!所示$系统设定"H 开始运行""M !H 油缸开始伸出"[M !H 油缸开始回程$图!!多体式补偿器油箱压力曲线!!由仿真结果可知"系统稳态时两种补偿器的压力均相等%油缸伸出工作时"油箱压力均减小"并且有一定振幅震荡"但是双补偿器结构形式的系统压力下降缓慢"震荡幅度也比较大%油缸回程时"系统增刊胡浩龙"等)深海液压系统压力补偿器研究+P"-!+!压力回升"双补偿器结构形式压力偏大"震荡幅度也比较大$由结果可知"两种结构形式对于系统稳态值没有影响"双体式补偿器压力下降缓慢"对系统压力有利"但是压力震荡也偏大$-M[!系统负载由于压力补偿器可以通过增大预充压力"增大油箱与环境压差"使得油箱压力始终大于海水压力"保证密封$但是水下液压系统油缸运动过程中"活塞要承受一个持续水压负载作用"海水深度越大"作用效果越明显$液压系统负载对系统动态特性也有很大影响"特别是油缸两端的瞬时压力"而油缸活塞为动密封"使得海水更加容易侵入系统$搭建系统模型进行仿真研究"系统设定"M!H 换向阀切换油缸开始运行"[M!H换向阀切换油缸回程"油缸有杆腔压力仿真结果如图R所示$图R!不同负载工况下油缸有杆腔压力曲线!!由仿真结果可知"当负载偏大时"油缸回程时油缸有杆腔压力明显低于海水压力"可能导致海水向液压系统泄露%在油缸两端增加节流阀"会降低油缸的运动速度"延长工作时间"但会显著提高油缸两端压力"提高系统密封可靠性$=!结!语通过&U0X2J仿真软件搭建系统模型"对压力补偿器进行研究分析"得到以下结论)!"#弹簧刚度对压力补偿器压力波动峰值影响很小"但对系统压力有很大影响$弹簧刚度越大"补偿器压力下降越快"与环境压差越小$所以"弹簧刚度应越小越好"恒力弹簧拥有良好特性$!P#压力补偿器增大内径"压力波动峰值也减小%压力补偿器活塞质量增大"压力波动峰值增大"压力冲击也增大$所以"压力补偿器设计时应尽量增大补偿器内径"减小活塞质量$!-#单体和多体式补偿器对补偿器压力稳态值没有影响$由于多体式有多个补偿器作用"补偿器压力下降缓慢"但是多体式部件多"故障率增高$所以选择多体式和单体式需要结合系统补偿量(空间体积等多方面考虑$![#由于负载作用"油缸工作时两端很有可能低于环境海水压力"导致系统进水$当在油缸两端增加节流阀控制油缸工作速度"可以显著提高油缸两端压力"提高系统密封可靠性$参考文献&"'陆钧成M深海油压动力源关键部件的研究&*'M成都)西南交通大学"P$"P M&P'邱中梁"汤国伟M Z$$$米深海液压系统设计研究&c'M液压与气动"P$$R!Q#)R M&-'章艳M压力适应型深海水下液压机械手及主从式多关节复合控制研究&*'M杭州)浙江大学"P$$R M&['孟庆鑫"王茁"魏洪兴等M深水液压动力源液压补偿器研究&c'M船舶工程"P$$$""P!!P#)R$M&!'陈建平"薛建平M深潜器设计中的压力补偿研究&c'M液压与气动""##!!"#)"R M&R'刘浩"胡震M深海载人潜水器滚动膜片式压力补偿器研究&c'M哈尔滨工程大学学报"P$"R"-Z!"$#)"-"-M&Z'刘振东M深海活塞式压力补偿器的力学特性分析&*'M合肥)合肥工业大学"P$"-M。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第39卷第1期 2017年1月 舰船科学技术
SHIP SCIENCE AND TECHNoL0GY VO1.39.No.1
Jan.,2017
舰船液压起重机波浪补偿消摆控制技术研究 蔡冬林 (南通航运职业技术学院轮机工程系,江苏南通226010)
摘 要:舰船上的液压起重机工作在动态颠簸过程中,很容易受到波浪的影响造成摇摆。为此提出一种小区 域分区进化算法来解决舰船液压起重机波浪补偿消摆控制问题。在控制算法中引入排挤因子,利用控制数据中的相 互约束作用形成小的控制单元,以此来提高收敛的速度,维持控制过程的快速性,保证控制精度。实验表明,这种 方法能够有效解决舰船液压起重机波浪补偿消摆控制问题,保证了船舶机械自动控制的准确性。 关键词:舰船液压起重机;波浪补偿;控制技术 中图分类号:U664 文献标识码:A 文章编号:1672—7619(2017)01一O1O4—05 doi:1O.3404/j.issn.1672—7619.2017.01.021
Ship hydraulic crane of extinction wave compensation control technology research CAI Dong—lin (Nantong Shipping College,Marine Engineering Department,Nantong 226010,China)
Abstract:The hydraulic crane working on the ship is easy to be affected by the wave during the dynamic process of turbulence.To solve this problem,a new algorithm to solve the problem ofwave compensation and control for ship hydraul- ic crane is proposed.The crowding factor in the control algorithm,the control function of the data in the form of mutual re- straint in order to control small units,in order to improve the convergence speed,speed to maintain process control,ensure the control precision.The experimental results show that this method can effectively solve the problem of wave compensa- tion and anti swing control of the ship hydraulic crane,and ensure the accuracy of the automatic control of the ship’S ma— chinery. Key words:ship hydraulic crane;compensation with the waves;the control technology
0 引 言 近年来,舰船用液压起重机的稳定控制问题,已 成为舰船科学中的最主要研究问题,其应用于船舶结 构工程、船舶水力工程、船舶设计工程与电子工程等 众多领域中…。其中,在其应用于船舶机械中自动控 制系统时,首先需要调节不同多个控制变量,如变压 器档位灯、发电机端的电压控制和并联电路时的电流 控制,变量调节完成后,为了保证控制过程的稳定性 和可靠性,还需采用多目标优化算法,寻求船舶稳定 控制的最优解。 但是,在一些机械设备的工作环境中,船舶的风 浪给机械设备的控制过程带来较大问题。控制过程的 多目标优化问题,是目前实现波浪补偿消摆控制的关 键问题。由于其多目标优化求解过程较为繁琐,且解 集往往存在不连续且分布不均匀等问题,因此难度远 高于单目标优化[2】。在优化的过程中,考虑到控制解 集的真实性,为实现解集尽可能的接近真实解,专家 学者已将研究目标转移到快速且高效的多目标优化算 法上【3 】。 根据实际需求可知,控制器输出端必须满足不同 海域风量条件下的目标动态最优,也就是所需解决波 浪补偿消摆控制多目标优化问题【5】。考虑到船舶机械 工程实际应用与需要,由于控制器输出端的各供电量 互不相同,导致求解容易出现分布不均匀的情况,加 大了多目标优化的难度【6]。在传统的船舶起重机设备 中,一般采用机械的数学规划法,将多目标优化问题 转化为单目标优化问题,然后采用加权的方式对其求
收稿日期:2016—10—09;修回日期:2016~l1—1 8 基金项目:南通市科技计划项目(GY12015030) 作者简介:蔡冬林(1973一),男,硕士,副教授,研究方向为轮机工程。 第39卷 蔡冬林:舰船液压起重机波浪补偿消摆控制技术研究 ・1O5・ 解,但这种方法只对选取的单目标有积极作用 ],对 其他目标的优化求解性能极其不理想;而且,若所需 优化多目标的分布并不均匀,则传统方法无法对其实 施求解过程,不能有效地求出并确定优化解集,得到 的优化结果不均匀,且与真实解集之间偏差过大,不 符合当今船舶机械工程实践中工程质量的要求,达不 到多目标优化效率及质量[8 o】。 因此,针对传统方法存在的以上问题,为了实现 快速高效地控制舰船液压起重机波浪补偿消摆,使控 制优化解集更加接近真实解,本文提出一种小区域分 区进化算法,来解决舰船液压起重机波浪补偿消摆控 制问题。在控制算法中引入排挤因子,利用控制数据 中的相互约束作用,形成小的控制单元,以此来维持 控制过程的快速性,保证控制精度。实验表明,这种 方法能够有效解决舰船液压起重机波浪补偿消摆控制 问题,保证了船舶机械自动控制的准确性。
1 舰船液压起重机波浪补偿消摆控制的目标函 数设计
在舰船液压起重机的动态控制系统中,不同控制 站点之间并非毫无联系,当水流发生不同程度的颠波 时,会对控制过程造成一定影响,时间与颠簸程度之 间的非线性致使产生的影响也是非线性的,海洋颠簸 环境对控制过程产生的影响,会随着控制系统的运行 过程不断加大,由于两者之间的这种紧密的关系,使 得运作流程都会受到影响。如今,现有的舰船液压起 重机的动态控制系统,不能精准的表达出摆动与风浪 强度之间的关系,所以舰船液压起重机的动态控制系 统的多目标优化效率普遍偏低。利用不同设备之间的 非线性关系,对舰船液压起重机各个部分之间的相互 作用组建方程,对其进行表述,用这个方法来确保控 制系统运行的稳定,提高其精准度。 现假设在此舰船液压起重机稳定控制系统中的相 关设备的个数为n个,在任意时间点或任意的时间段 内,波浪对船舶稳定性的影响,是从一侧冲击发起, 另一侧冲击结束,这一过程水的流量并不发生变化, 把设备之间相互影响的关系组建成一个非线性方程。 设第i个站点的水流经量用Ql表示,其它设备冲击此 设备的水流量用r 表示,冲击舰船液压起重机的水流 量用gf,表示,用P ,表示不同的设备之间压力。根据 舰船液压起重机两侧的水流量相等,且不发生变化, 则不同设备的水流量与系统管道之间的影响关系如 式(1)表示:
∑懈=∑a , f=l 对液压起重机与风浪强度之间的关系进行分析研 究,可对其组建非线性方程:
rj一∑EPiIsgn(qiy—qj )lqij—qyil=af, i=1 J=1
如式(1)所示,将影响函数G(i,J)表述成非 线性方程,完成相互之间影响的准确表述。 根据上述过程,完成了设备与风浪之间相互作用 的表述,可得到模型的限制范围,对系统的控制进一 步优化,式(3)为其优化目标函数:
P= ∑piuifl, Ui--Q i- ̄ s. 广
IJ 。。’
(3)min C ∑i f—p,)ai=0,
ri一∑ .Pijsgn(qij—qji)lqij—qjiI=ai。
式中, 为两个相反的状态,当 :0时表示站点关 闭,当 =1表示风浪冲击模式开启。 是换算系数。
2 小区域分区进化算法在舰船液压起重机波浪 补偿消摆控制中的应用
小区域分区进化方法不同于传统算法对多目标问 题的求解过程,其通过一些分区来实现集合的完美分 布,进而优化求解多目标,以下是此实现此过程的具 体步骤。 2.1小区域分区进化方法的提出 小区域分区进化方法的核心是在一个固定特有的 相同自然环境里衍生而来的,成员为了能够长久的活 下来,他们就通过激烈竞争以得到生存所必要的东 西,小区域分区进化方法使用先进拥挤方法,令其他 的个体成员的必要条件都演变成自己的生存环境,利 用该方法增强自己生存能力。该方法的首要任务就是 假设各个个体f,在某个目的函数条件下的适应度用d 来描述,而且代表第i个个体的小区域分区进化的个 数,相关值也代表个体f的集合程度。值的具体计算 公式为:
mi=> sh[d(i,-,)】, (4) jE P—op
式中,Pop为整个群体;d(i,J)为第i个个体与第 个个体所形成的距离,同样可以描述为彼此的相近 度。除此之外,sh[a]函数的表示成: