北斗卫星导航系统精密轨道确定方法研究
北斗导航及GPS技术在航海定位中的运用

北斗导航及GPS技术在航海定位中的运用摘要:长期以来,国内海洋环境极其繁杂,且变化无常,尤其在有船舶记载的阶段,产生海损事故的船只数量不计其数,而冲撞与搁浅为产生海损事件的重要起因之一,因此,应用在航海导航体系的研究和使用为当下非常热点的话题之一。
但是如果想要对北斗系统的相关情况进行深入化的分析,需要从北斗导航系统和GPS技术单历元双频模糊度解算固定率与载波相位差分动态定位精确度区别等方面进行相应的比较。
结合有关研究,最终可以得知,二者之间在定位精度方面的差异性比较微小,北斗卫星导航系统可符合船舶导航的精准度诉求。
关键词:北斗导航系统;GPS技术;航海定位;应用引言船舶在中远海航行时,若卫星导航信号长时间受到干扰,平台惯导的定位误差将逐渐增大,反介入∕抗拒止成为技术研究的热点。
专家分别对美国的反介入/区域拒止情况进行了分析。
专家对GPS信号拒止环境下的滤波方法和自动测距导航做了深入研究。
专家对卫星拒止环境下无人系统的关键技术进行了分析研究。
也有专家对全源定位与导航理论框架、SINS/GNSS等技术进行了研究。
事实上在中远海区卫星拒止环境下,利用已知位置区域的无线电发射台信号(短波、中波、长波、甚长波等),进行超视距地波、天波或波导波的信号接收,利用角度信息开展导航定位技术研究将变得十分有意义。
1GPS导航系统原理分析GPS导航系统主要由四个地球天线、四个MCS控制台和六个监测系统组成,其主要目标是全球定位系统数据,接收来自全球定位系统卫星的信号,从全球定位系统卫星的固定角度捕获全球定位系统卫星数据,并据此计算用户设备的计算结果。
当今GPS定位技术有许多不同的方法,但原理大致相同,是用GPS卫星测量的。
GPS定位位置可以根据GPS卫星的运动分为单个位置计算和相对位置计算,大多数情况下计算为伪距离。
多普勒定位和载波波测量也可用于GPS定位。
2北斗导航系统定位原理北斗导航系统使您能够准确确定位置,而北向航空器则允许传送位置信息,而北向航空器系统则有缺点,在某些领域有局限性。
gps星座轨道参数
gps星座轨道参数1.引言1.1 概述概述部分的内容是对GPS星座轨道参数这个主题进行简要介绍。
在这一部分,我们可以提到GPS星座是由一组卫星组成的系统,其目的是为全球定位系统(GPS)提供准确的定位信息。
每颗卫星都绕地球以特定的轨道运行,这些轨道参数对于GPS系统的正常运行至关重要。
GPS星座轨道参数包括卫星的轨道高度、轨道倾角、升交点经度以及轨道偏心率等。
轨道高度决定了卫星与地球之间的距离,而轨道倾角则影响了卫星在天空中的位置。
升交点经度表示了卫星轨道与地球赤道的交点位置,而轨道偏心率则反映了卫星轨道的离心程度。
通过精确控制GPS星座轨道参数,可以保证卫星系统的稳定性和可靠性。
这些轨道参数的调整需要考虑许多因素,如地球引力、大气阻力和其他卫星的相互干扰等。
同时,精确的轨道参数还能够为GPS用户提供更准确的定位和导航服务。
在本文中,我们将详细介绍GPS星座轨道参数的相关知识,并分析其对于GPS系统性能的影响。
通过深入探讨这些参数的特点和调整方法,我们旨在为读者提供更全面、准确的了解,并为相关领域的研究和应用提供参考依据。
1.2 文章结构文章结构部分内容如下:文章结构部分将介绍本文的组织结构和章节安排,以帮助读者更好地了解全文的内容。
本文共分为三个部分:引言、正文和结论。
在引言部分,我们将概述本文的主题和背景,并说明本文的目的。
首先,我们将简要介绍GPS星座和其在定位导航系统中的重要性。
接下来,我们将阐述全文的目标和意义,以引发读者的兴趣并概括本文的核心内容。
正文部分是本文的主体部分,分为两个小节:GPS星座和轨道参数。
在GPS星座小节中,我们将详细介绍GPS星座的概念、构成和功能。
我们将讨论GPS星座的组成要素,包括卫星和地面控制部分,并解释它们在GPS系统中的作用。
然后,我们将深入探讨轨道参数的重要性和定义,并解释它们对GPS星座的影响。
结论部分将对本文进行总结并展望未来的发展方向。
我们将概括本文的主要观点和结论,并提供一些关于GPS星座轨道参数研究的展望。
北斗卫星导航系统用户终端时延标定方法

北斗卫星导航系统用户终端时延标定方法谢维华;陈娉娉;孔敏【摘要】T he accuracy of time delay calibration for the user terminal of the BeiDou nav‐igation satellite system has a great impact on the timing accuracy of the user terminal .So the time delay calibration must be carried out before timing accuracy test .In this paper ,two kinds of time delay calibration schemes for satellite navigation users with absolute delay and relative delay are studied .For the BeiDou user terminal without one pulse per‐second(1PPS) input interface ,two absolute time delay calibration methods are proposed .Experimental re‐sults show that the error of these two calibration methods is better than 2 ns ,which meets the requirements of the 5 ns index for the time delay calibration of the BeiDou user terminal .%北斗卫星导航系统用户终端时延标定准确与否直接关系到用户终端的定时精度,因此用户终端在出厂前和进行定时精度测试时必须进行整机时延标定。
GPS导航定位原理以及定位解算算法
GPS导航定位原理以及定位解算算法GPS(全球定位系统)是一种基于卫星信号的导航系统,用于确定地球上任意点的位置和时间。
GPS导航定位的原理基于三个基本原则:距离测量、导航电文和定位解算。
首先,定位解算的基本原理是通过测量卫星与接收器之间的距离差异来确定接收器的位置。
GPS接收器接收卫星发射的信号,并测量信号从卫星到接收器的时间延迟。
通过已知卫星位置和测量时间延迟,可以计算出接收器与卫星之间的距离。
至少需要接收到4个卫星信号才能进行定位解算,因为每个卫星提供三个未知数(x、y、z三个坐标)和一个时间未知数。
其次,GPS导航系统通过导航电文提供的卫星轨道参数来计算卫星的精确位置。
每个卫星通过导航电文向接收器传递关于卫星识别码、卫星轨道和钟差等数据。
接收器使用这些参数来计算卫星的准确位置。
最后,通过定位解算算法,将接收器收到的卫星信号和导航电文中的轨道参数进行计算,可以确定接收器的位置。
定位解算算法主要有两种:三角测量法和最小二乘法。
三角测量法基于三角学原理,通过测量多个卫星与接收器之间的距离差异,然后根据这些距离差异以及卫星的位置信息来计算接收器的位置。
这种算法的优势是计算简单,但受到测量误差的影响较大。
最小二乘法是一种数学优化方法,通过最小化接收器位置与测量距离之间的误差平方和来求解接收器的位置。
该方法考虑到了测量误差的影响,并通过对多个卫星信号进行加权以提高解算的准确性。
除了上述的定位解算算法,GPS导航系统还使用了差分GPS和惯性导航等技术来提高定位精度和可靠性。
差分GPS通过接收器与参考站之间的信号比对,消除了大部分的误差,提高了定位精度。
惯性导航通过测量加速度和角速度来估计接收器的位移,可以在信号丢失或弱化的情况下提供连续的导航定位。
综上所述,GPS导航定位通过距离测量、导航电文和定位解算算法来确定接收器的位置。
通过接收到的卫星信号和导航电文中的轨道参数,定位解算算法能够计算出接收器的位置,并提供准确的导航信息。
空间目标定轨的模型与参数估计方法研究及应用

空间目标定轨的模型与参数估计方法研究及应用空间目标定轨是指对空间目标的位置、速度和轨道参数进行精确测量和推算的过程。
这个过程对于航天、导航、遥感等领域的应用具有重要意义。
本文将重点介绍空间目标定轨的模型和参数估计方法,并探讨其应用。
一、空间目标定轨模型空间目标定轨的模型包括轨道模型和测量模型。
1.轨道模型轨道模型用来描述空间目标在轨道上的运动规律。
常用的轨道模型包括开普勒模型、球谐模型、中心天体引力模型等。
其中,开普勒模型是最常用的一种模型,通过描述目标在椭圆轨道上运动的六个轨道要素来确定目标的轨道。
2.测量模型测量模型用来描述测量系统对目标位置和速度的测量过程。
常用的测量模型包括单点观测模型、多点观测模型、多传感器融合模型等。
其中,多传感器融合模型是一种综合利用多种不同传感器观测数据的模型,可以提高定轨精度和抗干扰能力。
二、参数估计方法参数估计方法是空间目标定轨的核心内容,根据观测数据对轨道参数进行估计,从而确定目标的位置、速度和轨道。
1.最小二乘法最小二乘法是一种常用的参数估计方法,通过最小化观测数据与模型之间的差异来求解轨道参数。
通过对残差方程进行线性或非线性最小二乘拟合,可以得到目标的轨道参数估计值。
2.卡尔曼滤波卡尔曼滤波是一种递归的参数估计方法,通过动态更新观测数据和状态方程,实现对轨道参数的实时估计。
卡尔曼滤波方法可用于单传感器或多传感器融合的定轨过程,能够提高定轨的精度和稳定性。
三、应用空间目标定轨的应用广泛,主要包括以下几个方面。
1.航天航天任务中,对于卫星、宇宙飞船等空间目标的定轨非常重要。
通过对目标的轨道进行精确测量和推算,可以实现航天器的精确定位、轨道控制和任务规划等功能。
2.导航在导航领域,定轨用于确定导航卫星的位置和速度,以便提供准确的导航信号和定位服务。
通过将多颗导航卫星的定轨结果进行融合,可以提高导航系统的精度和可靠性。
3.遥感在遥感领域,对于地球观测卫星的定轨具有重要意义。
北斗卫星导航系统空间信号授时设计分析

北斗卫星导航系统空间信号授时设计分析摘要北斗卫星导航系统是中国着眼于国家安全和经济社会发展需要,自主建设、独立运行的卫星导航系统,是为全球用户提供全天候、全天时、高精度的定位、导航和授时服务的国家重要空间基础设施。
北斗卫星导航系统由空间段、地面段和用户段三部分组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具短报文通信能力,已经初步具备区域导航、定位和授时能力,定位精度10米,测速精度0.2米/秒,授时精度10纳秒。
随着北斗系统建设和服务能力的发展,相关产品已广泛应用于交通运输、海洋渔业、水文监测、气象预报、测绘地理信息、森林防火、通信时统、电力调度、救灾减灾、应急搜救等领域,逐步渗透到人类社会生产和人们生活的方方面面,为全球经济和社会发展注入新的活力。
关键词:卫星导航系统;精准授时;卫星定位;北斗系统目录摘要 (1)第1章绪论 (1)1.1 课题研究背景 (1)1.2 理论概述 (1)第2章北斗系统 (2)2.1北斗一号 (2)2.2北斗二号 (2)第3章授时分析 (3)3.1基本概念 (3)3.2授时原理 (3)3.3北斗授时 (5)第4章误差分析 (6)第5章总结 (6)参考文献 (8)第1章绪论1.1 课题研究背景中国北斗卫星导航系统(英文名称:BeiDou Navigation Satellite System,简称BDS)是中国自行研制的全球卫星导航系统,也是继GPS、GLONASS之后的第三个成熟的卫星导航系统。
北斗卫星导航系统(BDS)和美国GPS、俄罗斯GLONASS、欧盟GALILEO,是联合国卫星导航委员会已认定的供应商。
2020年6月23日,北斗三号最后一颗全球组网卫星在西昌卫星发射中心点火升空。
北斗卫星导航系统由空间段、地面段和用户段三部分组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具短报文通信能力,已经初步具备区域导航、定位和授时能力,定位精度10米,测速精度0.2米/秒,授时精度10纳秒。
基于GPS测量数据的卫星在轨轨道预报算法研究

基于GPS测量数据的卫星在轨轨道预报算法研究刘燎;孙华苗;李立涛;张迎春【摘要】为提高微小卫星的在轨轨道预报能力,针对常用的低轨近圆卫星轨道,根据解析的轨道动力学模型,基于无奇点变量的拟平均要素法,用Kalman滤波技术给出了一种卫星解析星历参数在轨估计算法,用GPS测量信息对相关星历模型参数进行在轨估计.给出了算法流程.先由外部标志判断滤波器初始化状态,若需初始化,则可基于GPS测量数据,或地面上注星历参数,或上次滤波所得星历参数进行;若初始化已完成,则对星历模型参数进行Kalman滤波,得到更新的星历参数.给出了滤波算法中轨道预报、残差计算、量测计算和UD分解的计算模型.仿真结果表明:对轨道高度450 km以上的近地圆轨道,7d内的预报精度优于20 km.算法具自启动(自初始化)、收敛性佳、对测量数据的采样要求不严格等优点,实用性好.【期刊名称】《上海航天》【年(卷),期】2017(034)002【总页数】7页(P120-126)【关键词】微小卫星;自主能力;低轨近圆卫星轨道;星历模型;轨道预报;GPS测量数据;拟平均要素;Kalman滤波【作者】刘燎;孙华苗;李立涛;张迎春【作者单位】深圳航天东方红海特卫星有限公司,广东深圳518064;深圳航天东方红海特卫星有限公司,广东深圳518064;哈尔滨工业大学航天学院,黑龙江哈尔滨150001;深圳航天东方红海特卫星有限公司,广东深圳518064;哈尔滨工业大学航天学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】V448.2随着目前国内外卫星技术的不断发展尤其是卫星组网的发展,对卫星在轨自主能力的需求不断增加,在轨实时轨道确定成为判断卫星是否具有自主能力的首要条件。
随着低成本全球导航系统接收机(包括美国的GPS及中国的北斗导航系统)的应用,在微小卫星上进行实时轨道确定进而提高小卫星的自主能力,已成为目前的一种发展趋势[1-2]。
卫星星历的计算有解析法、数值法和半解析法等三类,受星载计算机计算能力的制约,我国星上轨道预报目前都采用仅考虑地球非引力场主要带谐项和大气摄动主要长期项的拟平均要素法[3-4]。
【国家自然科学基金】_精密轨道确定_基金支持热词逐年推荐_【万方软件创新助手】_20140801
2014年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
2014年 科研热词 测定轨 星间链路 全球卫星导航系统 中高轨航天器 飞行器 雷达测量 识别算法 精密轨道确定 空间相机 空间目标 稀疏数据 法方程叠加 姿态参数 坐标变换 初始轨道 分网定轨 igs站 gps导航星座 推荐指数 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42
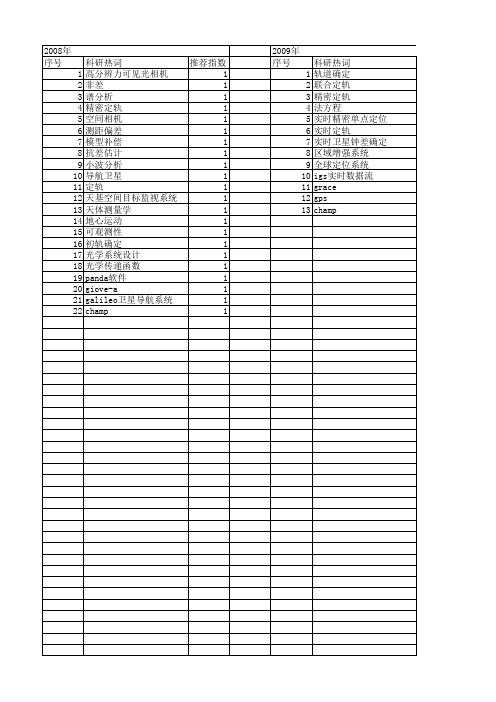
2008年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
科研热词 高分辨力可见光相机 非差 谱分析 精密定轨 空间相机 测距偏差 模型补偿 抗差估计 小波分析 导航卫星 定轨 天基空间目标监视系统 天体测量学 地心运动 可观测性 初轨确定 光学系统设计 光学传递函数 panda软件 giove-a galileo卫星导航系统 champ
推荐指数 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27