第十一章 汽车悬架控制系统
浅析汽车底盘主动悬架控制方法
浅析汽车底盘主动悬架控制方法随着汽车技术的不断发展,汽车底盘主动悬架系统已经逐渐成为了一种常见的装备。
这种系统可以根据车辆当前的驾驶状态和路况来主动调节悬架硬度,提升行车舒适性和稳定性。
在本文中,我们将对汽车底盘主动悬架控制方法进行一个浅析。
一、主动悬架原理主动悬架是指车辆悬挂系统具备主动调节功能,通过传感器感知车身运动状态,再根据实时数据调节悬架系统的工作参数,实现对车身姿态和路面适应性的主动调节。
主动悬架主要包括主动减振和主动悬架控制两部分。
主动减振通过控制减振器的阻尼力来调节车辆的悬挂硬度;主动悬架控制则通过控制空气悬挂元件或电磁阻尼器来实现对车辆悬挂的主动调节。
二、主动悬架控制方法1. 传统悬架控制传统的悬架系统主要通过设置不同的弹簧和减振器来实现对车辆悬挂系统的调节。
这种悬架系统在工作过程中需要依靠车辆的行驶速度和路面情况来进行调节,无法实现主动的悬架控制。
因此在高速行驶和复杂路况下,传统悬架系统的性能会受到一定的限制。
主动悬架控制方法则是通过悬架系统内置的传感器和控制单元,实时感知车辆的运动状态和路面情况,并根据这些数据来主动调节悬架系统的工作参数。
目前主动悬架系统主要采用以下几种控制方法:(1)电子控制电子控制是主动悬架系统的核心技术之一,通过悬挂系统内置的控制单元收集和处理来自传感器的数据,并根据预设的悬架调节算法来控制悬挂系统的工作状态。
在电子控制技术的支持下,主动悬架系统可以根据车辆当前的行驶状态和路况主动调节悬架硬度,提升行车舒适性和稳定性。
(2)气动控制为了实现对悬架系统的精准控制,主动悬架系统还需要配备一套高效的控制算法。
主动悬架控制算法的设计主要考虑以下几点:姿态控制是主动悬架系统的重要功能之一,通过感知车辆的侧倾角和纵向加速度来调节悬架系统的工作状态,提升车辆的稳定性和操控性。
(2)路面适应(3)悬挂硬度调节主动悬架系统在汽车领域具有广泛的应用前景,目前已经成为了豪华车和高端车型的标配。
概述汽车主动控制悬架系统的工作原理及控制模式

高速感应控制 车速 #/"$% & ’ 车 速 *" 0/"$% & ’ , 车 高 持 续 .(,) 以 上 大幅度变化 车 速 #/"$% & ’ , 车 高 持 续 .(,) 以 上 大 幅度变化
"$" """
""" "
连续坏路 面控制
0
0 ←0
车速与路面感应控制逻辑关系
悬架的刚度与阻尼 汽车行驶工况 “ 软”模式 “ 硬”模式 低 中 高 低 中 高 0
公共汽车
《城市公共交通》 " ! !##$
概述
汽车主动控制悬架系统
的 工作原理及控制模式
太原市公共交通总公司
摘 要 :主 动 控 制 悬 架 系 统 能 使 汽 车 乘 坐 舒 适 性 和 操 作 安 全 性
郭丽萍
( <)传感器。电子控制悬架系统传感器将汽车行驶的 路面状况和车速, 以 及起动、加速、转向、制动等工况转 变为电信号,输送给电子控制器。该系统所使用的传感器 见表 <。 表<
中图分类号: ’($)$$
文 章 编 号: "##*+"’(, ( !##$ ) #"+##",+#! 收 稿 日 期: !##!+#*+"#
C <B C
状态,在这两种不同的模式下,悬架由控制器控制在 三种状态,根据车速和路面的变化自动地调节刚度和 阻尼系数,使车身的振动达到最佳的控制。其逻辑关 系 见 表 .。 ( .) 车 身 姿 态 控 制 。 是 指 在 汽 车 车 速 突 然 改 变 及 转向等情况下,控制器对悬架的刚 度 和 阻 尼 实 施 控 制 , 以抑制车身的过度摆动,从而确保车辆乘坐舒适性和 操纵稳定性。其逻辑关系见表 ! 。 表!
悬架系统介绍

工作过程:
主动悬架系统的控制中枢是一个微电脑控制模块,在整车行驶过程中,悬架上 的多种传感器分别收集各种行车信息(车速、制动力、踏板速度、车身垂直方向 的振幅及频率、转向盘角度及转向速度等数据 ),电脑不断接收这些数据并与预 先设定的临界值进行比较,选择相应的悬架状态。 同时,微电脑独立控制每一只车轮上的执行元件,通过动力装置产生的作用 力控制执行单元相应的功能特性,从而能在任何时候、任何车轮上产生符合要求 的悬架运动。 另外,主动悬架具有控制车身运动的功能。当汽车制动或拐弯时的惯性引起 弹簧变形时,主动悬架会产生一个与惯性力相对抗的力,减少车身位置的变化。 例如当车辆拐弯时悬架传感器会立即检测出车身的倾斜和横向加速度,电脑根据 传感器的信息,与预先设定的临界值进行比较计算,立即确定在什么位置上将多 大的负载加到悬架上,使车身的倾斜减到最小。
4)多连杆式独立悬架 所谓多连杆悬挂,顾名思义就是通过各种连杆配置把车轮与车身相连的 一套悬挂机构。而连杆数量在3根以上才称为多连杆,目前主流的连杆数量 为5连杆。因此其结构要比双叉和麦弗逊复杂很多。
电控悬架控制系统
可调阻尼减振器由具有不同节流孔的转阀得到 舒适( )、正常 正常( )、运动 运动( 舒适(软)、正常(中)、运动(硬)三个等级 的阻尼。 的阻尼。
车速控制的可调阻尼悬架
不同等级的阻尼的车速范围: 不同等级的阻尼的车速范围:
起步、制动、急转弯和高速(100公里/小时以上)选择运动( 起步、制动、急转弯和高速(100公里/小时以上)选择运动(硬)改善操纵稳定性 公里 低速(40公里/小时以下)选择舒适( 低速(40公里/小时以下)选择舒适(软)得到好的平顺性 公里 中速(40-100公里/小时)选择正常( 中速(40-100公里/小时)选择正常(中)兼顾平顺性与操纵稳定性. 公里 兼顾平顺性与操纵稳定性.
高度控制可以保持车的水平
减少转向时的侧倾, 减少转向时的侧倾,
高速时降低车高还可以减少风阻,提高稳定性。 高速时降低车高还可以减少风阻,提高稳定性。
车高控制
车高控制的空气悬架
车高控制的空气弹簧由高度控制阀进行控制
当判定“车高低了”则向气室充气; 当判定“车高低了”则向气室充气;
当判定“车高高了” 则放气; 当判定“车高高了”,则放气;
(2)防车尾下坐控制 )
用于防止汽车启动或急加速时车辆后端下坐。 用于防止汽车启动或急加速时车辆后端下坐。
当车速在20km/h以下 以下 当车速在 ECU通过端子 通过端子SOL对执行器发出控制信号 通过端子 对执行器发出控制信号 且节气门开度较大或在突然打开时
不管选择器开关原先设置为何种方式, 不管选择器开关原先设置为何种方式,减振器减振力都将设置为硬
取消
3s后或车速超过 后或车速超过50km/h,防车尾下坐控制取消。 后或车速超过 ,防车尾下坐控制取消。
系统控制功能
汽车悬架知识ppt课件
减震器
减振器
前桥
弹簧
车桥
弹性元件
纵向导向杆
三:振动频率:
据力学分析可知,如将汽车看成一个在弹性悬架上作单自由度 振动的质量,则其自振动率:
C=M×g / f
f:悬架垂直变形挠度 M:悬架簧载质量 簧载质量 悬架的性能指标体现在:自振频率(n):取决于 悬架刚度
要求在设计悬架时,其自振频率应与人体步行时身体上、下 运动的频率相接近,在1~1.6HZ 的理想范围内。
3、当车桥与车架之间的相对速度过大时,减振器应能自动加大液流通道截面积,
使阻尼力保持在一定限度内。
车架
减震器
三、 减振器的分类:
按其作用方式不同分为:
车桥
弹性元件
1:双向作用减振器:在压缩、伸张两行程中均起减振作用。 2:单向作用减振器:仅在伸张行程中起减振作用。
1、双向作用筒式减振器
结构:
活塞杆 储油钢桶
伸张行程:当汽车掉入凹坑时,车轮下跳,
减振器受拉伸活塞上移。
上腔容积减少,油压 升高,油液推开伸张 阀,流入下腔。
车架 减震器
车桥
弹性元件
由于活塞杆占去一 定空间,所以自上 腔流入的油液不足 以充满下腔容积的 增加。储油缸中油 液推开补偿阀流入 下腔补充。
由于各阀门的节流作 用,便造成对悬架伸 张运动的阻力,使振 动能量衰减。
防尘罩 导向座
伸张阀
流通阀
活塞
压缩阀
补偿阀
工作原理
压缩行程:当汽车滚上凸起或滚出凹坑时,车轮靠近车架。
下腔容积减少, 油压升高,油液 推开压缩阀,流 入储油缸。
车架 减震器
车桥
弹性元件
容积减少,油压升 高,油液打开流通 阀,经过流通阀流 入上腔。
汽车电子控制技术》电子教案
《汽车电子控制技术》电子教案第一章:汽车电子控制技术概述1.1 汽车电子控制技术的定义与发展历程1.2 汽车电子控制技术的作用与重要性1.3 汽车电子控制系统的分类与组成1.4 汽车电子控制技术在我国的应用与发展趋势第二章:发动机电子控制技术2.1 发动机电子控制技术概述2.2 电控燃油喷射系统2.3 电控点火系统2.4 电控发动机排放控制系统2.5 电控发动机性能优化技术第三章:自动变速器电子控制技术3.1 自动变速器电子控制技术概述3.2 电控液力变矩器3.3 电控机械式变速器3.4 电控自动变速器控制策略与原理3.5 自动变速器电子控制技术的发展趋势第四章:汽车制动电子控制技术4.1 汽车制动电子控制技术概述4.2 电子控制防抱死制动系统(ABS)4.3 电子控制驱动防滑系统(ASR)4.4 电子控制电子制动力分配系统(EBD)4.5 电子控制车辆稳定控制系统(VSC)第五章:汽车电子控制安全技术5.1 汽车电子控制安全技术概述5.2 电子控制安全气囊系统(SRS)5.3 电子控制防撞系统(BSM)5.4 电子控制车道保持系统(LKAS)5.5 电子控制盲点监测系统(BSD)第六章:汽车电子控制舒适性技术6.1 汽车电子控制舒适性技术概述6.2 智能空调系统6.3 电动座椅与座椅记忆系统6.4 车载娱乐系统6.5 车载通信系统第七章:汽车电子控制网络技术7.1 汽车电子控制网络技术概述7.2 CAN总线技术7.3 LIN总线技术7.4 MOST总线技术7.5 FlexRay总线技术第八章:新能源汽车电子控制技术8.1 新能源汽车电子控制技术概述8.2 电动汽车动力系统控制技术8.3 混合动力汽车控制技术8.4 燃料电池汽车控制技术8.5 新能源汽车电子控制技术的发展趋势第九章:汽车电子控制技术检测与维修9.1 汽车电子控制技术检测方法与设备9.2 故障诊断与排除策略9.3 汽车电子控制部件的维修与更换9.4 汽车电子控制技术维修案例分析9.5 汽车电子控制技术维修发展趋势第十章:汽车电子控制技术的发展趋势10.1 自动驾驶技术10.2 车联网技术10.3 新能源汽车电子控制技术的发展10.4 汽车电子控制技术的创新应用10.5 汽车电子控制技术面临的挑战与展望第十一章:电子控制悬架系统11.1 电子控制悬架系统概述11.2 主动悬架系统11.3 被动悬架系统11.4 半主动悬架系统11.5 电子控制悬架系统的未来发展趋势第十二章:电子控制转向系统12.1 电子控制转向系统概述12.2 电动助力转向系统(EPS)12.3 液压助力转向系统12.4 电子控制转向系统的设计与工作原理12.5 电子控制转向系统的优点与挑战第十三章:电子控制制动系统13.1 电子控制制动系统概述13.2 防抱死制动系统(ABS)13.3 电子制动力分配系统(EBD)13.4 电子控制车辆稳定系统(ESC)13.5 电子控制制动系统的未来发展趋势第十四章:智能交通与车联网技术14.1 智能交通系统概述14.2 车联网技术的基本概念14.3 车联网技术的应用14.4 车联网技术的发展趋势14.5 车联网技术面临的挑战与解决方案第十五章:汽车电子控制技术的创新与挑战15.1 汽车电子控制技术的创新点15.2 汽车电子控制技术面临的挑战15.3 汽车电子控制技术的可持续发展15.4 汽车电子控制技术的政策与标准15.5 汽车电子控制技术的未来发展方向重点和难点解析本文主要介绍了《汽车电子控制技术》的各个方面,从概述、发动机和自动变速器控制技术,到制动和舒适性技术,再到网络技术、新能源汽车控制技术和检测维修,是发展趋势和未来挑战。
轿车空气悬架控制系统微分方程
轿车空气悬架控制系统微分方程随着汽车工业的不断发展,汽车的悬架系统也在不断地升级和改进。
空气悬架系统是一种新型的悬架系统,它采用气体作为弹簧,可以根据路面情况和车速自动调节悬架高度,提高车辆的稳定性和舒适性。
本文将介绍轿车空气悬架控制系统的微分方程。
轿车空气悬架控制系统由气压传感器、控制器、电磁阀和气囊组成。
气压传感器用于检测气囊内的气压,控制器根据气压传感器的信号控制电磁阀的开关,从而控制气囊内的气压,调节悬架高度。
假设轿车空气悬架控制系统中的气囊是一个理想气体,根据理想气体状态方程,气囊内的气压P和气囊内的气体体积V之间有如下关系:P*V = n*R*T其中,n为气体的摩尔数,R为气体常数,T为气体的温度。
由于气囊内的气体体积是可以改变的,因此可以将气体体积V看作是一个关于时间t的函数,即V=V(t)。
此时,气囊内的气压P也是一个关于时间t的函数,即P=P(t)。
根据牛顿第二定律,轿车在行驶过程中所受到的阻力与车速的平方成正比,因此可以将阻力F看作是一个关于车速v的函数,即F=F(v)。
根据牛顿第二定律,轿车所受到的合外力等于轿车的质量m乘以加速度a,即F=ma。
因此,轿车的加速度a可以表示为:a = F/m = F(v)/m根据牛顿第三定律,轿车所受到的合外力等于轿车所施加的反作用力,因此可以将轿车所施加的反作用力看作是一个关于时间t的函数,即R=R(t)。
根据牛顿第二定律,轿车所施加的反作用力等于轿车的质量m乘以轿车的加速度a,即R=ma。
因此,轿车所施加的反作用力可以表示为:R = ma = F(v)/m根据牛顿第一定律,轿车在匀速直线运动时,所受到的合外力为零,因此可以将轿车所受到的合外力看作是一个关于时间t的函数,即F=F(t)。
此时,轿车的速度v是一个关于时间t的函数,即v=v(t)。
根据牛顿第二定律和牛顿第三定律,可以得到如下微分方程:m*d^2v/dt^2 = F(v) - k*(v - v0) - m*g其中,k为阻尼系数,v0为车辆的设定速度,g为重力加速度。
汽车主动悬架控制系统的发展研究
汽车主动悬架控制系统的发展研究汽车主动悬架控制系统(Active Suspension System)是指通过电子控制系统实现对汽车悬架系统的主动控制,以提供更好的悬挂性能和乘坐舒适性。
该技术最早在20世纪80年代末期开始研究,到目前已经取得了显著的进展。
在早期的汽车悬挂系统中,弹簧和减振器是主要的悬挂元件,只能提供有限的悬挂调节功能。
而主动悬架系统则通过使用传感器、电机和控制单元等装置,实现对悬架系统的主动控制。
这样可以根据不同的路况和驾驶需求,自动调整悬挂刚度和阻尼,提高行驶稳定性和车辆控制性能。
1.第一代:早期的主动悬架系统通过对悬架刚度和阻尼进行调整来改善悬挂性能。
这些系统使用了传感器来监测车身的倾斜、加速度和行驶状态,并通过电控单元控制悬挂系统。
2.第二代:第二代主动悬架系统引入了主/从结构,即一个悬架控制单元控制多个悬架单元。
这样可以提供更好的悬挂调节性能和更高的可靠性。
3.第三代:第三代主动悬架系统进一步扩展了悬架控制的范围和灵活性。
除了调整刚度和阻尼外,这些系统还可以主动控制悬架高度和行驶高度,进一步提高车辆的稳定性和驾驶舒适性。
4.第四代:第四代主动悬架系统开始应用更高级的控制算法和传感器技术。
这些系统可以通过对车辆动力学和车辆状态的精确建模,实现更精准的悬挂控制。
同时,他们还可以采用更高级的传感器技术,如激光雷达和摄像头,来感知车辆周围环境,提供更全面的悬挂调节功能。
当前,汽车主动悬架控制系统已经广泛应用于高档豪华车和跑车等高性能车型中。
它们可以根据驾驶员的驾驶风格和乘坐舒适性需求,自动调整悬挂刚度和阻尼,并提供更好的悬挂性能和驾驶体验。
除了提供更好的驾驶和乘坐体验外,汽车主动悬架控制系统还具有其他一些优点。
首先,它可以改善汽车的悬挂系统寿命,减少零件的磨损和损坏。
其次,它可以减少车辆的噪音和振动,提高乘坐舒适性。
最后,它还可以提高车辆的行驶稳定性和操控性能,减少事故和碰撞的风险。
汽车悬架电子控制系统结构及工作原理
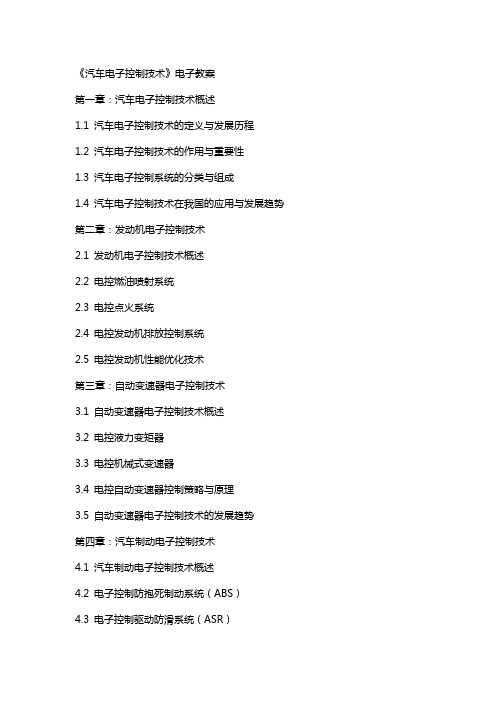
汽车悬架电子控制系统结构及工作原理作者:刘小龙来源:《大众汽车·学术版》2018年第12期摘要悬架是汽车底盘的重要组成之一,传统悬架系统主要由弹簧、减震器及导向机构三部分组成。
这种悬架只能适应特定道路和行驶条件,不能满足多变得道路状况,并且只能被动承受来自车身的作用力而无法主动调节,存在一定的缺陷。
随着汽车电子技术的发展,电子控制悬架克服了传统悬架存在的不足,实现了汽车技术的突破。
本文重点讲述了电子控制悬架系统的结构及工作原理,从而使读者能对现代汽车悬架技术有更好的认识。
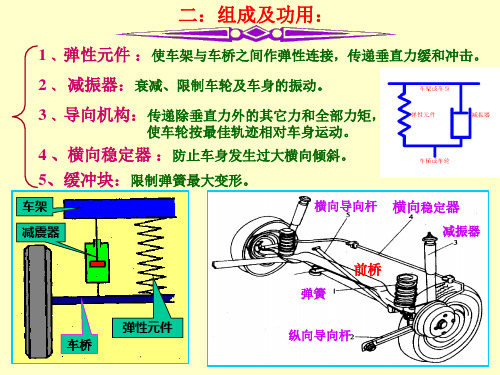
关键词悬架;电子控制系统;工作原理1 汽车电子控制悬架发展背景汽车的悬架是连接车身和车轮之间全部零件和部件的总称,主要由弹簧、减震器和导向机构三部分组成。
通过悬架的弹性支撑,有效地抑制、降低了车身的振动,以保证汽车行驶的平顺性和操作稳定性。
传统悬架,由于只能被动受力,因此存在着很多的不足。
随着汽车技术的不断发展,电子控制悬架渐渐取代了传统悬架。
电子控制悬架系统可以根据悬架位移、车速、转向、制动器信号等,由电子控制单元控制相关执行元件,可以根据行驶状况的变化主动改变刚度和汽车车身的高度,以抑制汽车倾斜,使车身姿态发生变化,因此,它能较好保持汽车的驾驶舒适性和操作稳定性。
2 汽车悬架电子控制系统的概述2.1 汽车悬架电子控制系统的基本组成電子控制悬架又称电子调节悬架系统,由传感器、控制开关、电控单元和执行器组成。
传感器和控制开关向电控单元输入信号,电控单元接到信号后,向执行元件发出控制指令,执行元件产生一定的机械动作,从而改变车身高度、空气弹簧的刚度和减震器的阻尼。
车身高度控制系统的主要功用是当车内乘员或载荷变化时,自动调节车身高度,使汽车行驶稳定。
2.2 汽车悬架电子控制系统的基本功能电子控制悬架系统的基本目的是通过控制调节悬架的刚度和阻尼力,突破传统被动悬架的局限性,使汽车的悬架特性与道路状况和行驶状态相适应。
其主要的作用有:①调节车身高度。
现代汽车电控悬架系统
备注:系统保护措施 在汽车行驶时,为了最大限度地降低车身振动对判断车身高 度带来的影响,读数时间间隔会适当延长。高度传感器 发出车身高度变化信号7-13S以后,EMS ECU才会向执行 元件发出控制信号。在这段时间,如果高度传感器没有 输入信号,ECU就不会改变车身高度。发生频次。 若在该段时间内所测得车高信号处于“过高区”比例达 75%-80%以上,则电脑将根据高度传感器的输入信号,向 排气电磁阀发出控制信号,打开排气电磁阀,空气弹簧 气室中的空气通过空气干燥器排向大气,从而达到降低 车身高度的目的。 此后,通过检测当发现车高信号处于“过低区”或“低 车身区”所占比例达到10%以上时,终止放气,完成一次
以电脑作为控制核心,对汽车悬架系统参数,包括弹簧放度、 悬架阻尼、侧倾刚度和车身高度等实行适时控制已经成为现 实 当前,对汽车悬架的控制主要有以下几种: (1)以改善坏路行驶能力和高速操纵稳定性为目的的车高控 制; (2)以改善舒适性和操纵稳定性为目的的减振器阻尼控制; (3)以改善舒适性和操纵稳定性为目的的弹簧刚度控制。 (4)以改善操纵稳定性为目的的侧倾刚度控制。 (5)综合以上各种考虑的综合性悬架。
被动悬架即传统悬架在设计时,不可能使乘坐舒适 性及操稳性都得到优化,只能是:在二者中间寻求 折中方案(在特定道路及速度下实现);或偏重于 某一种方案(牺牲一个方面,达到另一个目的)。
当前,人们对舒适性及操纵稳定性的需求越来越高, 所以开始研究及应用主动悬架。
悬架发展与分类
1981年开始车身高度控制,同年开发出可变减 震器阻尼力的新技术 1987年日本田公司率先推出空气弹簧主动悬架 90年代随电子技术发展,已具有在10-20秒内 做出反应的电控悬架系统