仿生机器人之机器蛇
机械蛇论文——精选推荐

机械蛇的世界关键词:机械蛇研究现状成果这个学期我选了机械创新设计的课程,这门课主要研究的是机械蛇,以前从来没有看到过机械蛇,第一次见到他们真的很惊讶很好奇,就那么几个部件连接起来就可以执行很多动作,完全被他的奥妙所吸引。
我们接下来与机械蛇的接触让我学到很多东西。
也让我初步认识了机械人领域的一些东西。
首先我们先了解机械蛇,即蛇形机器人的研究现状,机器人的移动方式主要有轮、腿、履带和无肢运动等。
蛇形机器人的运动方式是典型的无肢运动。
它主要是由舵机和单片机组成,我们可以拆开看它的内部结构和舵机的运行情况,和单片机的结构电路图,这些都让我们对机械蛇有了初步的了解,认识到了这个神奇的小家伙。
其次我们还知道了机械蛇的控制系统,无限发射器和接收器,每个无限发射和接受设备都是彼此相对应,这样就像对讲机一样每个都是对应自己的频率,这样才不会有彼此干扰的现象。
再者我们还学习到了,机械蛇的控制软件,他的编程、调试、下载、运行等,它与电脑软件的连接控制等很多知识。
编程可以说是对我们最难的一步,我们从没有运用过C语言等编程语言来真正的编制一个运行程序,这个里面有很多的知识我们已经忘记了,但是这次的实验让我们温习了一下编程语言的知识,也让我们学会了怎么应用已经学到的知识,但是总体来说我们做的还是很不够,以后要多多应用这些知识到实际。
最后让我最有感触的最多的就是机械蛇的应用。
机器蛇主要在恶劣的环境中执行人或其它机械无法或不能够顺利完成的工作。
在错综复杂的废墟中搜索和营救,在崎岖的狭道中穿行,极易使其受损或受伤,其中驱动器失效最为普遍。
再者在室外工作时(比如野外探险,外星球勘察,废墟营救等),机器蛇由较少的驱动器来驱动可以大大减少机器蛇的重量,降低能量消耗,在固定能耗下延长工作时间,还可以减小体积,提高其运动灵活性,扩大其相对活动空间。
机械蛇的前景很好,一定会有很多用途。
通过这门机械创新设计课程让我真正的认识了机械蛇,也让我了解了这个领域的现状,国外在蛇形机器人方面进行了大量的研究工作。
对机器蛇实验的一些感触与收获

对机器蛇实验的一些感触与收获在对于机器人这个词还处于茫然阶段的时候,我选择了机器人实验(二)这门课程,王伟老师将我从零基础的状态带入了机器人这个领域,开始了对机器蛇的学习与探究。
对于蛇形机器人,开始也是被很多人都感兴趣的仿生学所吸引,想看看到底用硬邦邦的东西是怎么实现蛇的运动。
本以为枯燥的学科在老师风趣幽默的语言和丰富生动的肢体动作下显得有意思多了!一、下面是我在这段时间学习中关于机器蛇的一些简单的认识:(一)、对于蛇形机器人的系统我们有了初步的认识开始几周的课,我们讲述的是理论课,我们通过对生物蛇的想象和观察发现,生物蛇的运动多种多样,蜿蜒运动、直线式蠕动、螺旋式滑动、蠕动、横波运动等等,但是无论是哪一种运动都可以看做是一列行波的传递。
(二)、蛇形机器人宏观运动的实现---模块化设构建我们将蛇身分成若干个关节,solidsnake利用垂直和水平方向的正交的关节来拟合蛇类生物的柔软身体,每两个正交的关节组成一个单元体。
每个关节实现相同的运动,只是时间上有所差异,也就是相位不同。
这样我们的工作就简单多了,只需编译出想要的运动的一个程序就可以了,其他关节只要改动一个时间参数就可以了。
那么这个程序的编写就是后面提到的软件部分的重要任务了,也是我们这次实验的重点内容。
蛇的每个关节不同方向的运动是通过舵机控制来实现的,从机采用了ATmega8处理器,每个从机模块控制两个正交方向的舵机工作。
舵机是一种可以根据给定信号转动一定角度的伺服电机,信号不同,其转角也不同,转角需控制在最大范围内。
(三)、关于机器蛇的软件部分这是我们这次实验的重点内容,老师给我们布置了六个实验,来帮助我们学习机器蛇单关节运动的实现,其中包括:控制芯片ATMega8的I/O输出、内部定时器、IO与定时器、单舵机控制、蛇体关节双舵机控制、单元关节通讯。
主要学习了几个软件的应用:ICCAVR、PonyProg2000、Protel99SE。
自二由度蛇形机器人单元设计

摘要本文研究的主要内容是二自由度蛇形机器人单元设计。
其主要目标是利用蛇(它的形态和姿势)做原形来研究具有与蛇的功能相似的蛇形机器人。
其主要功能要求:能利用单元之间的摆动是身体与环境之间的摩擦力能在凹凸不平/粗糙的面蜿蜒前进,也能在光滑的表面上滑行前进;能利用关节之间的相对运动实现身体的抬起从而可以跨过小沟、裂缝和障碍物等。
蛇形机器人单元之间的摆动和抬起运动本文采用耦合驱动的方式来实现。
扭转运动是蛇形机器人的有效运动方式,利用该步伐蛇形机器人可以跨越障碍。
在此基础上对蛇形机器人的扭转运动进行了扩展,使蛇形机器人不但能够完成平面的扭转运动,而且可以将扭转运动与其它的运动形式结合起来,完成复合运动。
当然这种复合运动不仅仅局限在二维复合运动,还包括比较复杂的三维运动,而且本文提出的简化输入方法有利于蛇形机器人在扭转运动过程中有效适应地形。
关键词:蛇形机器人;机构设计;耦合驱动;运动分析;AbstractThis paper deals with the two degrees of freedom module of snake-like robot. Utilizing the snake (its forms and motion) as a model to develop a snake-like robot. The snake-like robot perform the following functions: It can propel itself over uneven/rough ground and swim in a fluid by using its slender body;It can move across branches or crevasses, because it can tighten its body to make a linematically stable posture by using its long body and highly redundant actuators.In order to apply snake-like robots to the unstructured environment, the researchers have designed many gaits for increasing the adaptability to a variety of surroundings. The twist-related locomotion is an effective gait achieved by jointly driving the pitching-DOF and yawing-DOF, with which the snake-like robot can move on rough ground and even climb up some obstacles. The twist-related locomotion function is firstly solved, and simplified to be expressed by sine orcosine function. The 2D locomotion such as V-shape and U-shape is achieved. Alsoby applying it to the serpentine locomotion or other types of locomotion, thesnake-like robot can complete composite locomotion that combines the serpentinelocomotion or others withtwist-related locomotion. We extend the twist-related locomotion to 3D space. The experimental results are presented to validate all above analyses.Keywords: snake-like robot;mechanism design;coupled drive;analysis of creeping locotion第1章绪论1.1引言大自然不仅仅赋予人类生命和丰富的自然资源,而且其丰富的生命形态给予了人类无穷无尽的启迪,让人们充分地利用自然和改造自然。
模块化可重构蛇形机器人技术报告

模块化可重构蛇形机器人技术报告***本文转载自《ROBOTDIY——机器人发烧友天地》***模块化可重构蛇形机器人技术报告1. 蛇形机器人研究背景仿生学的范围很广,譬如雷达是对蝙蝠超声测距能力的模仿,而机翼使用的防震措施则借鉴了蜓蜻翅膀的结构。
仿生机器人运动学是仿生学的一个很重要的发展。
人类在智慧上超出动物很多,但在特定环境的适应上就要比动物差很多。
虽然人发明了很多的技术弥补了这一不足,但明显可以看到,舰船的灵活性比不上鱼类,飞机的灵活性比不上鸟类甚至昆虫,车辆的地形适应性比不上四条腿的动物。
仿生运动的研究可以弥补我们这方面的不足,对社会产生大的经济效益。
蛇形机器人的研究可以满足一些行业的需求。
蛇形机器人由于其天生的多关节、多自由度,多冗余自由度,可以有多种运动模式,可以满足在复杂环境中搜救、侦查、排除爆炸物等反恐任务;航空航天领域可用其作为行星表面探测器,轨道卫星的柔性手臂;工业上则可应用于多冗余度柔性机械手臂,管道机器人等方面。
区别于传统的“基于运动模型的运动控制策略”和“基于行为的运动控制策略”,以行为主义控制模型为基础,本文试图建立从模仿蛇类生物中枢神经系统及关节反射调节系统,实现一种“分布式底层运动控制——高层中枢决策”的控制模型。
并且经由独立开发的蛇形机器人样机验证此一模型,在实验中取得了良好的效果,证明本文提出的控制模型没有原则上的错误以及不可克服的应用困难。
2. 国内外研究情况分析1)目前国内外对蛇形机器人研究综述近几年来,特别是2000年以来,蛇形仿生机器人正在成为全世界新的研究热点。
其理由有二:首先,仿生机器人学正在机器人领域占有越来越重要的位置,而由于其自身的典型性,蛇形机器人是仿生领域的热点研究方向;其次,运动机理特殊的蛇形机器人有广阔的应用情景,例如战场上的扫雷,爆破,空间站的柔性机械手臂,通过能力很强的行星地表探测器等;且其模块化结构和高冗余度非常适应于条件非常恶劣而又要求高可靠性的战场、外层空间等环境。
基于多模态CPG模型的蛇形机器人仿生控制研究的开题报告
基于多模态CPG模型的蛇形机器人仿生控制研究的开题报告一、研究背景随着生物学、神经科学和机器人技术的不断发展,仿生机器人在生产和服务行业得到了广泛应用。
蛇形机器人是一种像蛇一样的柔性、多关节的机器人,其具有灵活性好、适应性强、行动稳定等优点,已经被广泛用于探测和救援等领域。
对于蛇形机器人的运动控制,利用生物学原理进行仿生控制研究,可以使其在复杂的环境中具有更加适应性强的运动能力,具有更广泛的应用场景。
二、研究内容本文将基于多模态中央模式发生器(CPG)模型,开展蛇形机器人仿生控制研究。
主要研究内容包括以下几个方面:1. 蛇形机器人的结构设计和建模,包括对关节、骨骼和连续运动的建模和描述。
2. 多模态CPG模型的构建和优化,以底层的生物学理论为基础,设计合适的CPG网络结构,实现蛇形机器人的高效控制;同时对CPG模型进行优化,提升蛇形机器人的运动性能。
3. 对仿生控制算法的仿真验证和实验验证,通过对蛇形机器人的各个环节进行测试和优化,以实现更好的仿生控制效果。
三、研究意义1. 该研究可以促进蛇形机器人技术的发展,提升其在探测和救援等领域的应用能力。
2. 通过对多模态CPG模型的研究和优化,可以为复杂机器人动力学建模和控制提供方法和思路。
3. 该研究对于探索生物学运动控制原理,并揭示其普适性和应用价值,也具有一定的理论意义。
四、研究方法本研究将采用多模态CPG模型,通过对蛇形机器人的关节、骨骼和动力学特征进行建模,确定适合的神经网络结构,构建并优化CPG模型。
根据仿真角度和实验角度的不同,本研究将应用不同的研究方法,包括仿真模拟分析、控制参数优化、实验验证和运动学分析等方法。
五、预期结果与成果通过本研究将获得以下预期结果:1. 提出一种基于多模态CPG模型的蛇形机器人仿生控制算法,适用于不同复杂环境下的机器人运动控制。
2. 构建了蛇形机器人的神经网络结构和动力学模型,并对CPG模型进行优化和改进,提升机器人的运动控制能力。
仿生机器人技术在灾害救援中的应用研究

仿生机器人技术在灾害救援中的应用研究近年来,自然灾害频发,给人们的生命财产造成了严重威胁。
如何在紧急情况下快速、有效地救助灾民,成为了一个全球性难题。
而仿生机器人技术的发展,为灾害救援提供了新的解决方案。
本文将介绍仿生机器人技术原理及其在灾害救援中的应用研究。
一、仿生机器人技术原理仿生机器人技术是以生物学为基础,利用科技手段创造机器模拟生物行为的一种技术。
其原理是通过模仿生物体的结构、材料、运动等方面的特点,设计制造具有类似道生物机能的机器人。
仿生机器人技术主要涉及三方面内容:运动控制技术、身体表面材料与结构设计技术和视觉感知与控制技术。
运动控制技术是仿生机器人技术的核心,通过对动物生物学与生理学知识的研究,将运动原理转换为数学算法,进而设计机器人的动作和行为。
针对身体表面材料与结构设计技术,在仿生机器人中,通过模拟生物体的表面形态、材质、质地等特点,精细地设计机器人外形及表面质地。
视觉感知与控制技术能为仿生机器人提供重要的物理环境信息,并对其行为做出反应和控制反馈。
二、仿生机器人在灾害救援中的应用研究1. 水下救援水下救援是一个复杂的任务,难度极大。
以往的救援方式要么是人工搜救,要么是使用机械器械进行搜救,但这些方式都存在风险和瓶颈。
然而,仿生机器鱼则可以成为一个改变这个状态的因素。
仿生机器鱼是仿照鱼类运动的特性制造而成的,具有神经网络和机械控制等优秀性能,可用于海洋勘探、水下救援等领域。
仿生机器鱼在执行救援任务时,采用可见光和声纳等多种传感器,从而实现特定目标的实时定位,并据此控制浮力、动态姿态、速度和方向。
2. 火场救援火场救援是一项危险、高风险的任务,如何在狭小的空间内快速找到被困者并迅速将其救出,成为了一项技术难题。
仿生机器蛇则为实现这一目标提供了帮助。
仿生机器蛇是以蛇为模型制造的机器人,可以灵活地移动于狭小的空间,如传送带、飞机腹部和普通的钢铁桶之间,通过其柔软的身体和变幻多样的姿态,找到火场中的被困者并进行救援。
仿生机构的分类和结构简介

仿生机构的分类与其结构简介摘要仿生机构是由刚性构件、柔韧构件、仿生构件以与动力元件等人为实物组合而成的机槭系统。
仿生机构按照机构所能实现的运动功能可划分为仿鸟飞行机构、仿蛇爬行机构、多足步行机构、尾鳍推进机构等。
本文针对以上四种类型的仿生机构进行了简要说明并分别举例介绍了其结构形式。
关键词仿生机构;类型;结构目录摘要1第1章仿生机构概述31.1引言31.2仿生机构的概念与组成31.3仿生机构的基本类型4第2章四种仿生机构分类介绍52.1仿生扑翼飞行机构结构简介52.1.1 仿昆飞行机器人结构简介52.1.2 扑翼三维运动的新型扑翼机构结构简介62.2仿蛇蠕动爬行机构结构简介82.2.1 多关节仿蛇机器人结构简介82.2.2 一种蠕动爬行方案结构简介92.3多足步行机构结构简介102.3.1 一种新型四足机器人机构构型设计112.3.2 具有手脚融合功能的多足步行机器人结构12 2.4尾鳍推进机构结构简介12结论14参考文献15第1章仿生机构概述1.1 引言所谓“仿生学”,就是旨在研究生物系统,用来改进人类工程技术的一门属于生物科学与技术科学之间的边缘新兴学科。
具体地说,它是研究和探索生物系统的结构特性、能量转换、信息控制过程,并把研究的结果用于改善现有的或创造全新的机械设备、俭测仪器、建筑构型石工艺过程与自动装置等工程技术。
1.2 仿生机构的概念与组成仿生机构是由刚性构件、柔韧构件、仿生构件以与动力元件等人为实物组合而成的机槭系统。
通过运动副或仿生关节的联接,系统的各部之间能保持足够确定的相对运动,在控制系统的指挥下,可于某种程度上模拟设计者所期望的某特定生物的运动功能。
其中,刚性构件的概念与传统机构学中的构件概念一样。
指的是机构中做刚体运动的单元体,柔韧构件和仿生构件却是传统机构学中的新概念,前者是指弯曲刚度很小(在研究问题中其刚度可以被忽略)且不会伸长或缩短或弹性很小)的带状构件;后者是指那些为模仿生物运动器官的力学特性而增设的,在机构中独立存在,不影响机构相对运动,只起改善传动质量的构件。
中国机器蛇无孔不入
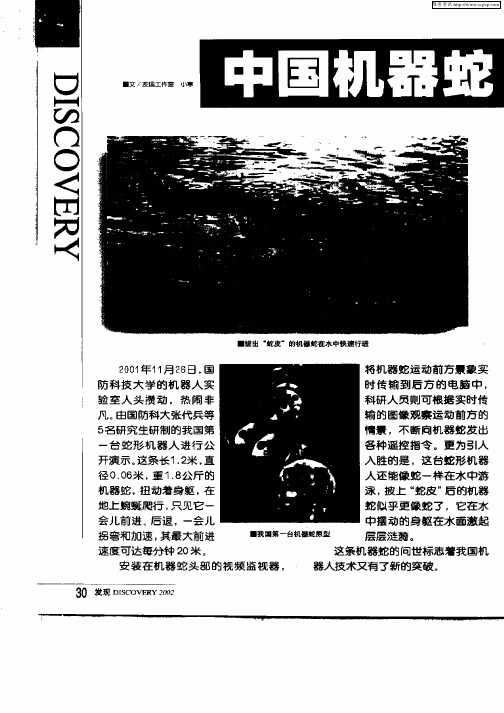
会 儿 前 进 、 退 ,一 会儿 后 拐 弯 和 加 速 , 最 大 前 进 其 速度可达每分钟 2 0米 。
● 我 国第 一 台机 器蛇 原型
中摆动 的身躯在水 面激起
层层 涟 漪 。
这 条机 器 蛇 的 问 世 标 志 着 我 国机 器人 技术 又 有 了新 的 突 破 。
蛇 的 第一 代 产品 将 于不 到一 年 的时 间里 问世 , 时工 程 师 届
将 命 夸其 完成 部 分 高难 度 的动 作 , 如说 完 垒 站立 起来 行 比
走等。
灵感来源—— 《 动物 世界 》
谈 到这 条蛇 形 机 器人 的 研发 过 程 , 悉 的人 都 说 , 熟 这
不 亚于 一 场 艰苦 的 科技 创 新 攻坚 战 2O 年 4 r1 i 月的一 天 , 中央 电视 台 动物 世 界 》栏 目正 在播 放 一 个介 绍 蛇 的节
一
将 机 器 蛇 运 动 前 方 景 象 实 时 传 输 到后 方 的 电脑 中 , 科 研 人 员 则 可 根 据 实 时 传 输 的 图像 观 察 运 动 前 方 的 情 景 ,不 断 向 机 器 蛇 发 出 各 种 遥 控 指 令 。更 为 引人
台 蛇 形 机 器 人 进 行 公
发进 国 家 部十 分 重视 蛇 形 机 器 人 的研 制和 开 发 。 日本
是 最 早 开 展蛇 形 机 器 人研 究 的 国 家 ,东 京 科技 大 学 于 1 7 92 年研 制 出世 界上 第 一个 蛇 形 机 器人 ,其 速度 可 选 4 O厘 米 /
秒。
而 美 国的蛇 形 机 器 人 研 究 则代 表 了 当 今世 界 的先 进 水 平 ,2 0 0 0年 1 0月 ,美 国航 空 航天 局 在加 利 福 尼 亚装 备 研 制