水下机器人的机构设计与控制研究
水下清洗机器人毕业论文

水下清洗机器人毕业论文标题:水下清洗机器人的设计与应用摘要:本论文旨在介绍水下清洗机器人的设计与应用,重点探讨其在水下环境中的特点、机构设计、控制方法以及实际应用等方面。
通过研究水下清洗机器人,可以提高水下设备的维护效率和安全性,具有广泛的应用前景。
一、引言水下设备维护是水下工程中的关键任务之一,传统的清洗方法通常需要人工操作,效率低且存在安全隐患。
因此,研发一种能够在水下环境中进行清洗作业的机器人具有重要的意义。
二、水下清洗机器人的特点1. 耐水性:水下清洗机器人需要具备良好的耐水性能,能够在水下环境中稳定运行。
2. 高效性:水下清洗机器人应具备高效的清洗能力,能够快速而彻底地清洗水下设备。
3. 智能化:水下清洗机器人应具备智能化的控制系统,能够根据所需清洗任务自主规划路径和作业方案。
三、水下清洗机器人的机构设计1. 结构设计:水下清洗机器人应具备紧凑而稳定的结构设计,以方便在狭小的水下环境中操作。
2. 清洗机构设计:水下清洗机器人应配备合适的清洗机构,如喷水装置或刷子等,能够有效地清洗水下设备表面。
3. 动力系统设计:水下清洗机器人的动力系统应具备足够的推进力和续航能力,以应对复杂的水下环境。
四、水下清洗机器人的控制方法1. 环境感知:水下清洗机器人需要具备环境感知模块,能够实时感知水下环境的温度、压力等参数。
2. 自主导航:水下清洗机器人应具备自主导航能力,能够根据预设的清洗路径和作业方案进行自主导航。
3. 作业控制:水下清洗机器人应能够根据实际作业需求,控制清洗机构的动作、清洗力度等参数。
五、水下清洗机器人的应用1. 海底油气管道清洗:水下清洗机器人可用于海底油气管道的定期清洗,提高管道的流量和使用寿命。
2. 水下海洋设施维护:水下清洗机器人可用于海洋设施的清洗和维护,如海洋风电设备的叶片清洗。
3. 水下遗址保护:水下清洗机器人可用于水下遗址的清洗和保护,保护文化遗产的完整性。
六、结论水下清洗机器人是一种能够在水下环境中完成清洗任务的智能化设备,具有重要的应用价值。
基于仿生机器鱼技术的水下机器人研究
基于仿生机器鱼技术的水下机器人研究水下机器人的研究和发展一直是科技界关注的焦点之一。
随着科技水平的不断提高和新技术的不断涌现,人们对水下机器人的期望也越来越高。
近年来,随着仿生机器鱼技术的发展,水下机器人领域迎来了一次新的变革。
一、仿生机器鱼技术的原理及应用仿生机器鱼研究的原理是基于鱼类的生物学特性,将其应用于机器人的设计和制造中。
仿生机器鱼能够根据自己的运动状态、环境变化等因素进行相应的调整和控制,从而达到一定的适应性、灵活性和智能化。
仿生机器鱼技术的应用领域非常广泛,包括水下探测、海洋环境监测、水下作业、深海勘探等方面。
与传统的水下机器人相比,仿生机器鱼具有更好的机动性、航行性和自适应性,能够在复杂的海底环境中执行各种任务。
二、水下机器人的研究现状及发展趋势当前,水下机器人在海洋勘探、海洋科学研究、海底资源开发等领域得到了广泛的应用。
在这些领域中,水下机器人需要具备高精度、高效率、高可靠性等特点,能够完成各种复杂的任务。
针对这些需求,科技界开展了大量的研究工作,涉及到机器人的机械结构、智能控制、材料制备等多个方面。
同时,仿生机器鱼技术的不断发展为水下机器人的研究提供了一种全新的思路和方法。
未来,水下机器人将会越来越普及和应用,随着人工智能、物联网等新技术的发展,水下机器人将具备更高的智能化和自主性,能够在更多的领域中发挥出更大的作用。
三、基于仿生机器鱼技术的水下机器人研究案例近年来,国内外的许多研究机构和企业都在开展基于仿生机器鱼技术的水下机器人研究工作。
以下是几个典型的研究案例:1. 「北京航空航天大学仿生机器人实验室」的仿生机器鱼北京航空航天大学仿生机器人实验室研制的仿生机器鱼外形逼真,能够实现自主控制、路径规划和障碍物避免等功能。
该机器鱼的研发对于提高水下机器人的智能性和机动性具有重要意义。
2. 日本东京大学研究组的多关节仿生机器鱼东京大学研究组设计的多关节仿生机器鱼由多个模块组成,能够实现自主航行、鱼群协作等功能。
水下机器人技术及其应用实例分析
水下机器人技术及其应用实例分析近年来,水下机器人技术逐渐走进人们的视线,这种现代化的技术不仅在工业生产中大展拳脚,同时也在深海探测、环境监测、海洋拓展等方面发挥着越来越重要的作用。
水下机器人技术是指一种能够在水下环境下工作及自主完成各种任务的电子机器设备,包括无人潜水器、机器人、无人机船等。
本文将从水下机器人的组成结构、应用场景以及现实应用实例等方面展开分析。
一、水下机器人的组成结构水下机器人的整体结构主要由外壳、摄像头、照明器、液晶显示器、电机、电器、控制系统等组成。
其中,外壳是用于保护电路和电子设备的核心部分,主要承担起防水和抗压的作用;摄像头和照明灯是用于拍摄和照明的,能够快速获取水下信息,实时回传数据;液晶显示器和控制面板是用于显示电路和控制的操作面板,能够直观地了解水下机器人的状态。
除此之外,还需要安装相应的控制系统和软件,以实现对水下机器人的操作与控制。
二、水下机器人的应用场景水下机器人能够完成各种任务,如水下探测、海洋资源勘探、水下搜救、水下拆弹等。
在海洋勘探方面,水下机器人可以快速检测那些人类无法到达的深海油气资源;搜救中,水下机器人能够快速定位受困人员的具体位置,提高搜救的成功率;水下拆弹方面,还可以用于探测隐蔽下降在水下的敌对水雷等。
三、水下机器人的现实应用实例1、搜救:在2014年的马来西亚MH370飞机失事事件中,无人潜水器就承担起了寻找飞机残骸的任务,这使得整体搜索过程更为高效且安全。
2、海洋勘探:挪威斯塔托石油公司2019年在北海的施鲁斯堡油气田对深海钻探进行了尝试,任务使用了该公司最新的海洋科技。
二维和三维空间信息的处理等设施可远程控制一个自主的水下机械手,该机械手可以执行对岸设施无法完成的操作。
3、科学研究:2018年,中国科学家在距离西班牙近万公里的海底,通过控制水下机器人轻松完成了跨越太平洋向美洲拓展塔斯曼海种床的目标。
这为随后的海底地壳实验提供了奠基性的工具。
水下机器人的定位与控制技术
水下机器人的定位与控制技术一、引言随着现代科技的不断发展,各种智能化的设备不断涌现,其中水下机器人是其中之一。
这种设备被广泛应用于海洋的勘测、维修、救援等工作中。
在现代化的海洋科学研究和海洋工程的实践中,水下机器人起着越来越重要的作用。
然而,水下机器人在海洋中行驶环境复杂,同时面临着海流和海浪的影响等诸多问题,因此需要完善的定位与控制技术来确保其准确执行任务,保证不会发生意外情况。
二、水下机器人的定位技术水下机器人的定位技术是指在水下环境中利用各种传感器和算法,确定机器人所在的具体位置以及与目标的相对位置关系和方向的技术。
水下机器人的定位技术主要包含以下三种。
1.基于声纳的定位技术声纳是一种通过声波技术产生的水下探测信号。
基于声纳的机器人定位技术,是通过水下传回声波信号,利用三角定位技术来确定机器人所处位置的一种技术。
基于声纳的定位技术是目前最广泛应用的水下机器人定位技术之一。
2.基于标记的定位技术基于标记的定位技术是指固定标记点,通过机器人定位模块识别标记点的位置,再通过标记点位置信息确定机器人位置和方向的一种技术。
目前,基于标记的定位技术被广泛应用在潜水器、ROV以及AUV等水下机器人上。
3. 全局定位技术全局定位技术是指利用全球卫星导航系统如GPS和GLONASS 等卫星信号,对水下机器人进行定位的技术。
基于GPS的水下机器人定位是目前应用较广泛的全局定位技术之一。
三、水下机器人的控制技术水下机器人的控制技术包括控制算法、姿态控制、运动控制等多个方面。
1.控制算法水下机器人的控制算法是通过预设的机器人控制参数和目标要求来优化机器人的行动方向,实现机器人从当前位置到所需的位置,同时保证机器人的稳定性和可控性。
2.姿态控制姿态控制是对水下机器人的姿态进行控制的一个重要方面,包括控制水下机器人的俯仰、横滚和航向等三个方向。
姿态控制旨在将机器人的行动稳定化,以确保机器人有更好的控制性能和更准确的数据采集结果。
水下机器人的控制技术

水下机器人的控制技术水下机器人是指一种可以在水下运行的机器人,通常被用于进行水下勘探、海底工程、海洋科学研究等领域的工作。
控制是水下机器人的重要环节之一,对于水下机器人的性能和功能有着至关重要的影响。
本文将会从水下机器人的控制技术入手,分为三个部分进行讲解:远程控制技术、自主控制技术和自主水下定位技术。
一、远程控制技术远程控制技术是最常见和最基础的水下机器人控制技术,通常被用于控制低代码(所谓的“线控”)水下机器人。
通过遥控器或者计算机,远程操作员可以对水下机器人进行控制,实现各种姿态的调整和运动控制。
这种控制技术的优点在于可靠性高,对于大多数任务来说控制精度足够,而且需要的技术基础较低。
但是,远程控制技术也存在一些明显的缺点:通讯延迟较大,对海洋环境的干扰较强,无法实现自主水下定位等。
二、自主控制技术为了解决远程控制技术的一些缺陷,自主控制技术开始逐渐得到了人们的关注和应用。
自主控制技术的基本思想是让水下机器人具有自我判断、自主规划和自主执行的能力。
这种技术的实现需要使用大量的传感器和计算机软件,以确保机器人能够在复杂环境中正确地感知周围环境和自身的状态,并能做出相应的控制决策。
自主控制技术的优点在于可以自主化、智能化地完成一些任务,具有较高的可干扰性和强适应性等特点。
但是,由于需要大量的传感器装备和高强度的计算机软件,使用成本相对较高,而且需要相对较高的技术基础。
三、自主水下定位技术自主水下定位技术是水下机器人控制技术中最为复杂的一部分,也是实现自主控制技术的关键环节之一。
自主水下定位技术可以分为两类:惯性定位和声学定位。
惯性定位是依靠陀螺仪、加速度计等传感器来实现的,可以较准确地估计水下机器人在水下的位置和运动状态。
而声学定位则是通过测量声波在水中传播的时间和距离来实现的,需要安装一定数量的声呐设备和相关算法。
自主水下定位技术的优点在于可以实现在没有GPS等卫星导航信号的情况下准确地定位自身的位置和运动状态,从而实现更加精准的控制和更高效的运动规划。
水下机器人姿态角LQR-鲁棒方差控制实验研究

水下机器人姿态角LQR-鲁棒方差控制实验研究华克强1,赵世伟1(1.中国民航大学 工程技术训练中心,天津 300300)摘要:采用自动平衡控制系统作为物理仿真系统对水下机器人姿态角控制进行实验研究。
结合具体系统设计了鲁棒方差控制器,分析了设计参数和系统参数变化对系统性能的影响。
针对系统对大偏差和小偏差不同的要求,采用了LQR控制和鲁棒方差控制复合控制器;结合实际参数不确定范围确定了合理的设计参数范围;进一步结合实际调试中的具体问题确定了适当的系统参数。
研究表明LQR-鲁棒方差控制策略可以保证系统在较大范围的参数变化时,保持稳定、有适当的带宽,并对随机干扰实现了合理的抑制。
研究结果可供研制水下机器人控制系统参考。
关键词:水下机器人;复合控制;鲁棒方差控制;实验研究中图分类号:TP24 文献标识码:A文章编号:Experimental Research of Ocean Underwater Vehicle with LQR-RobustVariance ControlHUA Ke-qiang1,ZHAO Shi-wei1(1. Engineering Techniques Training Center, Civil Aviation University of china, Tianjin, 300300, China)Abstract:Auto balance control system is taken as an actual simulation system for experimental research of underwater vehicle’s attitude angle control. According to actual system, robust variance controller is designed; the influence of system performance is analyzed as design parameters and system parameters changing. To big and small deviation, system has different requirements, so take the controller with the LQR control and robust variance control together; According to actual uncertain parameters’ scope, reasonable design parameters’ scope is fixed; further more, system parameters is fixed according to problem in actual debugging. Research shows that method of LQR-robust variance control could ensure system with feasible bandwidth stable, even parameters change in a greater scope, and can realize suit restraining stochastic disturbances. The result can be used as reference for the research of underwater robot control system.Key words:Underwater robot; Attitude control; Robust variance control; Experimental research0 引言海洋作为人类尚未开发的宝地和高技术应用领域之一,已经成为各国主要的战略目标,是近年来国际竞争的焦点之一。
《水面移动机器人鲁棒控制方法与实验研究》

《水面移动机器人鲁棒控制方法与实验研究》一、引言随着科技的不断进步,水面移动机器人已经逐渐成为科研和实际应用的重要领域。
水面环境具有多变性和不确定性,这对水面移动机器人的控制技术提出了更高的挑战。
鲁棒控制作为解决这类问题的关键技术之一,已成为研究的热点。
本文将针对水面移动机器人的鲁棒控制方法进行深入的研究,并通过实验验证其有效性。
二、水面移动机器人概述水面移动机器人是一种能够在水面上自由移动的机器人,广泛应用于海洋探测、水质监测、救援等众多领域。
其运动控制涉及到多方面的技术,包括传感器技术、运动规划、控制算法等。
其中,控制算法是影响机器人性能的关键因素之一。
三、鲁棒控制方法研究1. 鲁棒控制基本原理鲁棒控制是一种能够处理系统不确定性和外部干扰的控制方法。
它通过设计合适的控制器,使系统在面对不确定性和干扰时仍能保持稳定的性能。
在水面移动机器人中,鲁棒控制主要应用于解决由于水面环境的不确定性导致的机器人运动不稳定问题。
2. 鲁棒控制方法在水面移动机器人中的应用针对水面移动机器人的特点,本文提出了一种基于滑模控制的鲁棒控制方法。
该方法通过引入滑模面,使系统在面对不确定性和干扰时能够快速地调整到滑模面上,从而实现稳定的运动控制。
此外,还采用了自适应控制技术,根据系统的实时状态调整控制参数,进一步提高系统的鲁棒性。
四、实验研究1. 实验设计为了验证所提出的鲁棒控制方法的有效性,我们设计了一系列的实验。
首先,在模拟水环境中进行实验,以验证算法的可行性。
然后,在真实的水环境中进行实验,以验证算法的实用性和鲁棒性。
2. 实验结果与分析(1)模拟水环境实验结果:在模拟水环境中,我们分别对机器人进行了直线运动、曲线运动以及避障等实验。
实验结果表明,所提出的鲁棒控制方法能够使机器人在面对不确定性和干扰时仍能保持稳定的运动性能。
(2)真实水环境实验结果:在真实的水环境中,我们进一步对机器人进行了长时间、长距离的运动实验。
水下机器人关键技术研究
夸■疆 道
_ _ l _ ● _ _ _
S p
_
e c
_
ia l
● _ l l
R
_
e
l
po
_ _
r
_
ts
_ _
1
它 是 高层 控 制 实
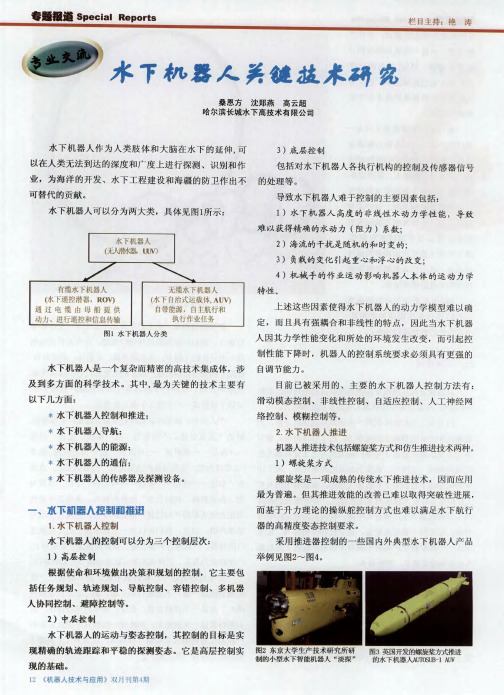
图2 东 京 大 学 生 产 技 术 研 究所 研 制 的小型水 下 智 能机 器 人 淡 探
“
◆
”
图 3 英 国开 发的螺 旋桨方式推进 的水 下 机 器 人AI 嘲 肛 1 AUv
。
’
一
:
i
^
,
寺j i 譬
。
和
一
一
{0 l
1 1
0
i
:
栏 目主 持:艳
涛
P具 2 仿生推 进技 术 欧米加 导航精 度低 、覆盖 面积 有 限,而G S 有全球 较 )
。
机 器 人 推 进 技术包 括螺 旋 桨 方 式和 仿 生 推进 技术 两 种
1
丰
) 螺 旋 桨方 式
一
丰
螺旋桨是
最 为普遍
。
项 成 熟 的传 统 水 下 推 进 技 术
,
因而 应用
,
但 其 推 进 效 能 的 改 善 已 难 以取 得 突 破 性 进 展
一
,
+
∞地 警 r 奠 I 搿 誊 I j j 至茅 霞 i 曼 j
) 机 械 手 的作 业 运 动 影 响 机 器 人 本体 的运 动 力 学
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水下机器人的机构设计与控制研究
近年来,随着科技的不断发展,水下机器人渐渐成为人们关注的热点之一。
水
下机器人的机构设计与控制研究直接关系着其性能的优化和功能的实现。
本文将探讨水下机器人的机构设计和控制方法,并对其未来发展进行展望。
一、机构设计
1. 船体结构
水下机器人的船体结构是实现各种任务的基础。
现代水下机器人通常采用船体
分体式设计,方便维修和改进。
船体结构应具备高强度、轻质化和良好的流线型,以提高机器人在水中的运动效率和稳定性。
2. 推进系统
推进系统是水下机器人的动力源,常见的推进器有螺旋桨、水喷射和水力喷吹器。
螺旋桨适用于较大的水下机器人,具有较高的推进效率和稳定性;水喷射器适用于小型机器人,具有较高的速度和灵活性。
3. 操作臂
操作臂是水下机器人的关键部件之一,用于进行各种工作和任务。
操作臂应具
备足够的自由度和稳定性,同时在设计上要考虑其可伸缩性和抓取能力。
近年来,一些先进的机械手臂还引入了人工智能和机器视觉技术,进一步提升了机器人的操作能力。
二、控制方法
1. 自主导航
水下机器人的自主导航是实现其智能化和自主化的关键技术。
传感器、定位系
统和路径规划算法是实现自主导航的核心要素。
水下机器人常用的传感器包括声纳、
摄像头、激光雷达等,用于感知环境和获取位置信息。
定位系统可以通过GPS、
惯性导航等技术实现,以提供精准的位置信息。
路径规划算法则通过分析环境地图和机器人位置,确定最佳的路径,实现自主导航。
2. 任务规划与执行
水下机器人常被用于进行水下勘探、修复、潜水等任务。
在任务规划和执行过
程中,机器人需要能够根据任务需求,做出相应的决策和行动。
任务规划和执行是水下机器人控制的核心问题,涉及到路径规划、动态控制、遥操作等技术。
近年来,一些先进的控制方法如强化学习、深度学习等也被应用于水下机器人的任务规划与执行中,取得了一定的效果。
三、未来展望
水下机器人的机构设计与控制方法的研究仍然处于不断探索和发展的阶段。
未
来的发展趋势主要包括以下几个方面:
1. 智能化发展
随着人工智能技术的不断发展,水下机器人将更加智能化,能够根据环境变化
做出适应性决策,实现更复杂的任务。
2. 多机器人协作
多机器人协作可以提高水下机器人的工作效率和任务执行能力。
未来,水下机
器人将通过信息交流和协作,共同完成复杂的任务。
3. 能源与动力技术的改进
水下机器人的长时间工作离不开高效的能源与动力系统。
未来,人们将致力于
涉及能源技术和动力技术的改进,提高机器人的续航能力和工作效率。
综上所述,水下机器人的机构设计与控制研究是实现水下机器人功能优化和性
能提升的重要一环。
通过不断的创新和发展,相信水下机器人将在未来的海洋勘探、水下救援等领域发挥重要作用。