经纬仪技术参数
全站仪导线测量原理

全站仪导线测量原理一、全站仪导线测量的概述全站仪导线测量是一种广泛应用的测量技术,它通过全站仪进行高精度角度和距离测量,实现平面控制测量。
全站仪导线测量具有自动化程度高、精度稳定可靠、操作简便等优点,广泛应用于城市规划、建筑、交通、水利等领域。
二、全站仪导线测量的基本原理全站仪导线测量的基本原理是利用全站仪进行角度和距离的测量,通过数学计算得出测量点的平面坐标。
全站仪是一种集测距仪、电子经纬仪和计算机技术于一身的智能型测量仪器,它可以通过内部计算机系统自动进行数据采集和处理,大大提高了测量的精度和效率。
具体来说,全站仪导线测量的基本步骤如下:1.在测量区域布设控制点,通常选择地势较高、通视良好的位置。
2.在控制点上架设全站仪,对中整平,设置测站点和后视点,输入相关参数,如仪器高、棱镜高、气压等。
3.配置全站仪参数,包括坐标系统、投影参数、单位设置等,确保与实际工程要求一致。
4.对测量区域进行角度和距离测量,通过全站仪的望远镜和内置计算机系统进行数据自动记录和处理。
5.根据测量的角度和距离数据,通过数学计算得出测量点的平面坐标。
三、全站仪导线测量的实施步骤1.确定测量方案:根据工程要求和实际情况,确定测量范围、控制点布设方案、测量精度等。
2.准备工具和资料:准备全站仪、棱镜、脚架、记录本、测绳等工具,收集相关资料,如地形图、控制点资料等。
3.实地踏勘:对测量区域进行实地踏勘,了解地形地貌、建筑物等情况,以便更好地布设控制点和选择合适的测量方法。
4.控制点布设:根据测量方案和控制点布设要求,在测量区域内选择合适的位置布设控制点,并做好标记。
控制点应尽量均匀分布,方便后续测量和数据处理。
5.全站仪架设与校准:将全站仪安装在三脚架上,对中整平,然后进行校准。
校准包括对中器校准、水平器校准和误差校准等,以确保测量的精度和准确性。
6.角度和距离测量:根据实际情况选择合适的测量模式,如距离模式、角度模式或跟踪模式等。
经纬仪的使用步骤
经纬仪的使用步骤
使用经纬仪的步骤
经纬仪是地图测量领域许多应用中重要而基本的工具,它可以用来测量距离、方位、高度等相关信息。
要想使用好经纬仪,就必须学好怎样使用它。
下面就来介绍一下如何正确使用经纬仪的步骤。
第一步,正确安装经纬仪。
在这一步中,需要根据需要,选择合适的安装位置,并用一定的工具将装备安装到该位置。
安装完成后,应该检查一下安装情况,确保整个安装过程的准确性,以确保后续使用的准确性。
第二步,正确设置经纬仪。
此步骤中,应该做到准确设置经纬仪的参数,如时间、地理位置、精度等,确保采集的位置信息及其他信息的准确性。
第三步,开始采集数据。
在这一步中,需要根据具体的任务,使用经纬仪指定的各种方法,如测距、拍照、录音等,开始采集各种数据。
第四步,数据处理。
在采集完成后应该对已采集的数据进行处理,如对空间数据进行变形、绘制图纸等,以满足需求。
第五步,结束使用。
当任务完成后,应该及时关闭经纬仪,并将其正确收藏,避免损坏,这样可以使经纬仪在下次使用时不会出现问题,也保证了经纬仪的正常使用。
以上就是使用经纬仪的步骤,按照这些步骤来操作,可以确保采集的
数据的准确性,也可以保证经纬仪能够正常使用。
因此,在使用经纬仪之前,有必要了解其使用方法和操作流程,以确保使用的准确性。
一种经纬仪自准直姿态实时测量方法

一种经纬仪自准直姿态实时测量方法张杰;王京海;石磊;牟小刚;范生宏【摘要】航天产品对姿态参数提出高精度测量需求,立方镜-经纬仪准直测量法为其中应用最为广泛的方法。
本文在对经纬仪自准直原理研究的基础上,针对产品姿态调整传统测量方法需多次架站、效率低的问题,提出事先计算调整理论值,将计算所得的理论值设置为观测参数,通过垫片对产品进行姿态调整,在一次架站的情况下,实现对产品姿态调整;同时,对该方法的适应范围进行讨论。
经分析,该方法可实现对产品调整状态的实时测量,提高测量效率,减少操作强度,在实际应用中取得了良好效果。
%Aerospace products have high-precision measurement requirements for attitude parameters, and cubic mirror-theodolite alignment measurement method is widely used. Based on the principle of theodolite auto collimation research, product attitude adjustment measurement proposed by real-time measurement, principle of the method, the scope and application experience have been introduced. This method can achieve real-time measurement of the product, adjustment of the operation is accuracy and immediate intervention, reduce the number of instrument station calibration and product attitude measurement frequency, improve measurement efficiency, and reduce operating strength.【期刊名称】《光电工程》【年(卷),期】2015(000)005【总页数】6页(P39-44)【关键词】立方镜;准直测量;姿态实时测量【作者】张杰;王京海;石磊;牟小刚;范生宏【作者单位】北京卫星制造厂,北京 100190;北京控制工程研究所,北京 100190;北京控制工程研究所,北京 100190; 空间智能控制技术重点实验室,北京100190;北京控制工程研究所,北京 100190; 空间智能控制技术重点实验室,北京 100190;清华大学土木工程系,北京 100084【正文语种】中文【中图分类】V556在航天器装调及试验阶段,对产品装星姿态参数提出了极高精度需求。
Epoch25 RTK GPS简介

测量型GPS接收机
GPS定位原理
--GPS 确定位置的基本原理
单点定位
首先我们可以知道GPS卫星在空中的位置;其次,我们又能准确测定我们所在地点A至卫星之间的 距离,那么A点一定是位于以卫星为中心、所测得距离为半径的圆球上。进一步,我们又测得点A 至另一卫星的距离,则A点一定处在前后两个圆球相交的圆环上。我们还可测得与第三个卫星的距 离,就可以确定A点只能是在三个圆球相交的两个点上。根据一些地理知识,可以很容易排除其中 一个不合理的位置而得到A点的三维坐标位置。
P-Code 卫星星历
L1/L2:载波相位
C/A码:粗码
P码: 精码
Ephemeris(星历):描述有关卫星运行轨道的信息 预报星历(广播星历):通过导航电文传递给用户,轨道参 数需推求。 后处理星历(精密星历):用户观测时间的星历。
地面控制系统
GPS 的控制部分由分布在全球的由若干个跟踪站所组 成。分为主控站、监控站和注入站。主控站位于美国克 罗拉多Colorado 的法尔孔Falcon 空军基地。它的作用 是根据各监控站根据GPS 的观测数据,计算出卫星的 星历和卫星钟的改正参数等,并将这些数据通过注入站 注入到卫星中去。同时它还对卫星进行控制,向卫星发 布指令,当工作卫星出现故障时调度备用卫星替代失效 的工作卫星工作。主控站也具有监控站的功能。
GPS接收机位置的计算 (伪距法) GPS接收机为了确定其自己的位置,需要接收来自四颗不同的卫星的信
号,从而计算出信号的传输时间Δt。计算基于笛卡尔三维坐标系统以地 心为原点。接收机与四颗卫星的距离R1,R2,R3,R4(如下图)可分 别通过信号传输时间Δt1,Δt2,Δt3,Δt4来计算出。由于四颗卫星发送
RTK系统组成
GPS_RTK技术及在工程测量中的应用

科技论坛GPS-RTK技术及在工程测量中的应用裴德夫1李猷2(1、湖北省地质环境总站,湖北荆州4340202、湖北国土资源职业学院,湖北荆州434000)1概述随着社会和经济建设的快速发展,基础建设与工程建设迎来前所未有的发展机遇,以GPS 为基础的RTK技术也迅速发展起来,并在工程测量领域发挥着重大作用。
RTK技术是大地测量、空间技术、卫星技术、无线电通讯与计算机技术的综合集成,又称载波相位差分技术,是实时处理两个测站载波相位观测值的差分方法。
差分GPS有两种形式:一种是RTK技术;另一种是RTD技术。
RTK技术的全称是实时动态载波相位差分技术,即Real Time Kinematic Tech-nique。
RTD技术的全称是实时伪距差分(或叫平滑伪距差分)技术。
当前RTD技术的定位精度较低,尚不能满足工程测量的精度要求,而RTK 技术的定位精度已能达到厘米级,完全可以满足一般工程测量的精度要求。
2GPS-RTK技术特点2.1GPS-RTK的配置组成RTK系统主要由一个基准站、若干个流动站、通讯系统3大部分组成。
基准站包括GPS接收机(接收机通常具有数据传输参数、测量参数、坐标系统等的设置功能)、GPS天线、无线电通讯发射设备、电源、基准站控制器等设备。
流动站的基本配置是:GPS天线、GPS接收机、无线电通讯接收设备、电源、流动站控制器。
流动站可处于静止状态,也可处于运动状态。
2.2GPS-RTK工作原理RTK是建立在全球导航定位系统(GPS)基础上的定位技术,是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
在RTK作业模式下,基准站对所有可见GPS卫星进行连续地观测,并通过数据链将接收到的卫星信息(伪距和载波相位观测值)及基准站信息(基准站坐标、天线高等)一起由通讯系统传送给各流动站。
在流动站上,GPS接收机在接收GPS卫星信号的同时,通过无线电接收设备,接收基准站传输的观测数据,当流动站完成初始化工作后,控制器即可根据接收到的数据在系统内组成差分观测值进行实时处理,根据相对定位原理,解算整周模糊度未知数并计算、显示移动站的三维坐标及其精度。
城市测量规范

简述经纬仪操作过程

简述经纬仪操作过程使用经纬仪的操作过程:一、安装操作:1、检查经纬仪的外观,验证是否有外部损坏。
2、安装调试好了准备使用,注意两者之间安装位置紧密,不能有影响结果的隙缝。
3、按照经纬仪的技术规格,合理安装、接线,接触良好,没有损坏现象。
二、环境调试:1、环境:实验环境通风、湿度、温度等要求以及机械传动、负载、能源供应等要符合经纬仪的要求。
2、检查磁场等特殊的环境,以及对经纬仪的电气安全控制设备的调试,检查它们的正确性和稳定性,并充分了解它们的使用需求和注意事项。
三、软件调试:1、网络调试:检查经纬仪设备和控制机之间的网络连接。
2、参数调试:设置或修改经纬仪的参数,确保参数的正确性、可靠性和便于使用。
3、测试调试:检查设备的功能是否正常,可以根据实际需要进行测试调试,检查经纬仪的性能和使用的可靠性是否符合设计要求。
四、加热调试:1、确保工作环境温度符合经纬仪的设计要求,确保经纬仪正常工作;2、检查加热元件加热时间控制参数正确,确保加热元件按时加热,并且热量均匀;3、检查加热元件运行是否正常,确保恒温控制可以达到设计要求,以及调节准确度和精度;4、检查经纬仪的运行是否达到设计要求,确保它的准确度和稳定性能。
五、正式运行:1、启动经纬仪,检查操作系统和硬件运行参数是否正常,并确保经纬仪正常运行;2、检查实际运行中的经纬仪的参数和功能的状态是否正常;3、比较实际运行和设计要求的性能是否一致;4、定期检查经纬仪的工作状态,时时保持经纬仪的正常运行;5、把工作情况反馈给设计师或者维护人员,以便及时修改不足或者优化设计,提高经纬仪的质量和用户体验。
科力达全站仪参数表及常见技术问题解答模板
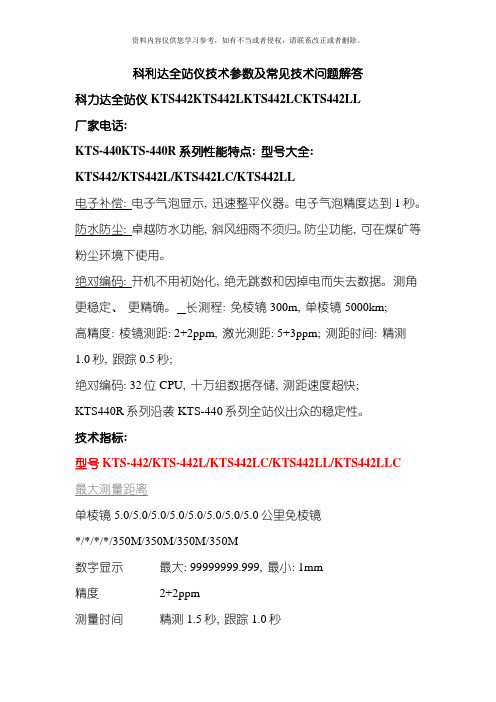
科利达全站仪技术参数及常见技术问题解答科力达全站仪KTS442KTS442LKTS442LCKTS442LL厂家电话:KTS-440KTS-440R系列性能特点: 型号大全:KTS442/KTS442L/KTS442LC/KTS442LL电子补偿: 电子气泡显示, 迅速整平仪器。
电子气泡精度达到1秒。
防水防尘: 卓越防水功能, 斜风细雨不须归。
防尘功能, 可在煤矿等粉尘环境下使用。
绝对编码: 开机不用初始化, 绝无跳数和因掉电而失去数据。
测角更稳定、更精确。
长测程: 免棱镜300m, 单棱镜5000km;高精度: 棱镜测距: 2+2ppm, 激光测距: 5+3ppm; 测距时间: 精测1.0秒, 跟踪0.5秒;绝对编码: 32位CPU, 十万组数据存储, 测距速度超快;KTS440R系列沿袭KTS-440系列全站仪出众的稳定性。
技术指标:型号KTS-442/KTS-442L/KTS442LC/KTS442LL/KTS442LLC最大测量距离单棱镜5.0/5.0/5.0/5.0/5.0/5.0/5.0/5.0公里免棱镜*/*/*/*/350M/350M/350M/350M数字显示最大: 99999999.999, 最小: 1mm精度2+2ppm测量时间精测1.5秒, 跟踪1.0秒气象修正输入参数自动改正棱镜常数修正输入参数自动改正角度测量测角方式绝对编码式码盘直径79mm最小读数1"/5"可选精度2"5"探测方式水平盘: 对径竖直盘: 对径望远镜成像正像镜筒长度154mm物镜有效孔径望远: 45mm测距: 50mm 放大倍率30×视场角1°30'分辨率3"最小对焦距离1m自动垂直补偿器系统液体电子传感补偿工作范围±4'精度1"水准器管水准器30"/2mm圆水准器8'/2mm光学对中器KYTS442LLKTS442LLCKTS442RLKTS442RLC为激光对点(双LL免棱镜L为激光对点机型)成像正像放大倍率3×调焦范围0.5m~∞视场角5°其它带SD卡存储功能: KTS442LCKTS442RCKTS442RLC( 带C 的为SD卡机型)显示类型双面, 6行中文显示电源可充电镍-氢电池电压直流6V连续工作时间10小时尺寸160mm×150mm×330mm重量5.8kg1、为什么要采用绝对编码度盘?答: 绝对编码测角技术与光栅度盘测角技术相比, 不但具有开机无需角度初始化, 关机后保留角度信息等优点, 而且能够使仪器获得高度稳定, 精确的测量值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
经纬仪技术参数
★1.方便的读数与测量:
读数方便,显示清晰 ,液晶显示16*2字符(LCD)的双面显示
垂直角与水平角可用度分秒显示.
2.方便的键盘操作:
功能键可以进行快速作业
★3.使用方便:
集成化、精度高、重量轻,主机只有4.6 kg (包含电池)
★4.自动关机功能:
使电池的使用时间更长
★5.角度测量与角度锁定:
盘左盘右角度测量
垂直角可转换成坡度百分比
水平角在任何位置可置零
水平角锁定功能
6.明亮的光学特征:
即使在光线条件不好的情况下也能成像清晰
★7.碱性电池供电
充电式电池:Hi-MH2000mAh,一次充电可使用20小时左右
碱性干电池:可使用25小时
★8.激光指向:可调节光源大小
★9.TIPmap3.0软件
【规格参数】
★倍率………………………………………………………………30×
★有效孔径………………………………………………………………45mm
★分辨率………………………………………………………………3″
★视场………………………………………………………………1°30′
★最短视距………………………………………………………………1.35m
★乘常数 (100)
★加常数 0
★调焦……………………………………………………………… 2速
★测角精度………………………………………………………2″
★最小刻度……………………………………………………………1′
★面板……………………………………………………………双面
★自动补偿………………………………………………………………有
★防水性能……………………………………………………………JIS4 级
横水准气泡…………………………………………………………… 3″/2mm
★圆气泡……………………………………………………………8′/2mm
望远镜调焦范围……………………………………………………………0.5-& 注:以上带“★”号技术参数为重要指标,不满足按废标处理;其它项要求超过两项不满足按废标处理。
水准仪规格参数
★倍率 (28)
★有效孔径……………………………………………………………30mm
★分辨率……………………………………………………………3″
★视场………………………………………………………………1°20′
★最短视距………………………………………………………… 0.4m
★乘常数 (100)
★加常数 0
★调焦……………………………………………………………… 1速
★1KM往返误差………………………………………………………±1.5mm
★补偿范围 (15)
★补偿方式……………………………………………………………磁力
★灵敏度………………………………………………………………10′/2mm
★最小刻度………………………………………………………………1°
读数方式………………………………………………………………全圆
★防水性能……………………………………………………………JIS4 级
测微装置……………………………………………………………没有
★整平装置……………………………………………………………三螺旋
注:以上带“★”号技术参数为重要指标,不满足按废标处理;其它项要求超过两项不满足按废标处理。
GPS技术参数
★1.TIPmap3.0软件
★2.AsteRx2e OEM主板,具备septentrio公司先进的APME多路径抑制技术,多星系统跟踪GPS、GLONASS、GALILEO、北斗、卫星,136卫星通道;
★3.配备Carlson ServCE专业测量软件。
★4.双锂电池(5000mAh),智能自动切换不断电,支持热插拔;
★5. RTK作业同时可以记录原始数据,通过谷歌地球(google earth)可以在卫星地图上重现测量过程及轨迹;
6.手簿软件支持用户自定义图层,并在数据采集过程中自动成图。
★7.定位精度:水平垂直
单点定位 1.1m 1.8m
SBAS 0.7m 1.2m
DGPS 0.35m 0.65m
★8. RTK动态精度:
水平精度:10mm+1ppm;垂直精度:15mm+1ppm
平均固定所需时间:7S 置信度:>99.9%
★9. RTK静态性能:
水平精度:2mm+0.5ppm;垂直精度:5mm+0.5ppm
10.数据输出频率: 10Hz,最大25Hz
11.工作温度:—20℃至+65℃存储温度:—40℃至+75℃
12.电耗0.25-0.7A额定
13.震荡/跌落: 2m
手簿参数:
1.Windows mobile6.5操作系统,Surv CE软件。
2.内置20通道GPS,定位精度≤2.5m(软件后处理精度< 1米),具备手持机
功能。
3.内置电子罗盘、高度计。
4.抗1.5米跌落,可水中浸泡。
注:以上带“★”号技术参数为重要指标,不满足按废标处理;其它项要求超过两项不满足按废标处理。