动态规划-图论

§1动态规划模型
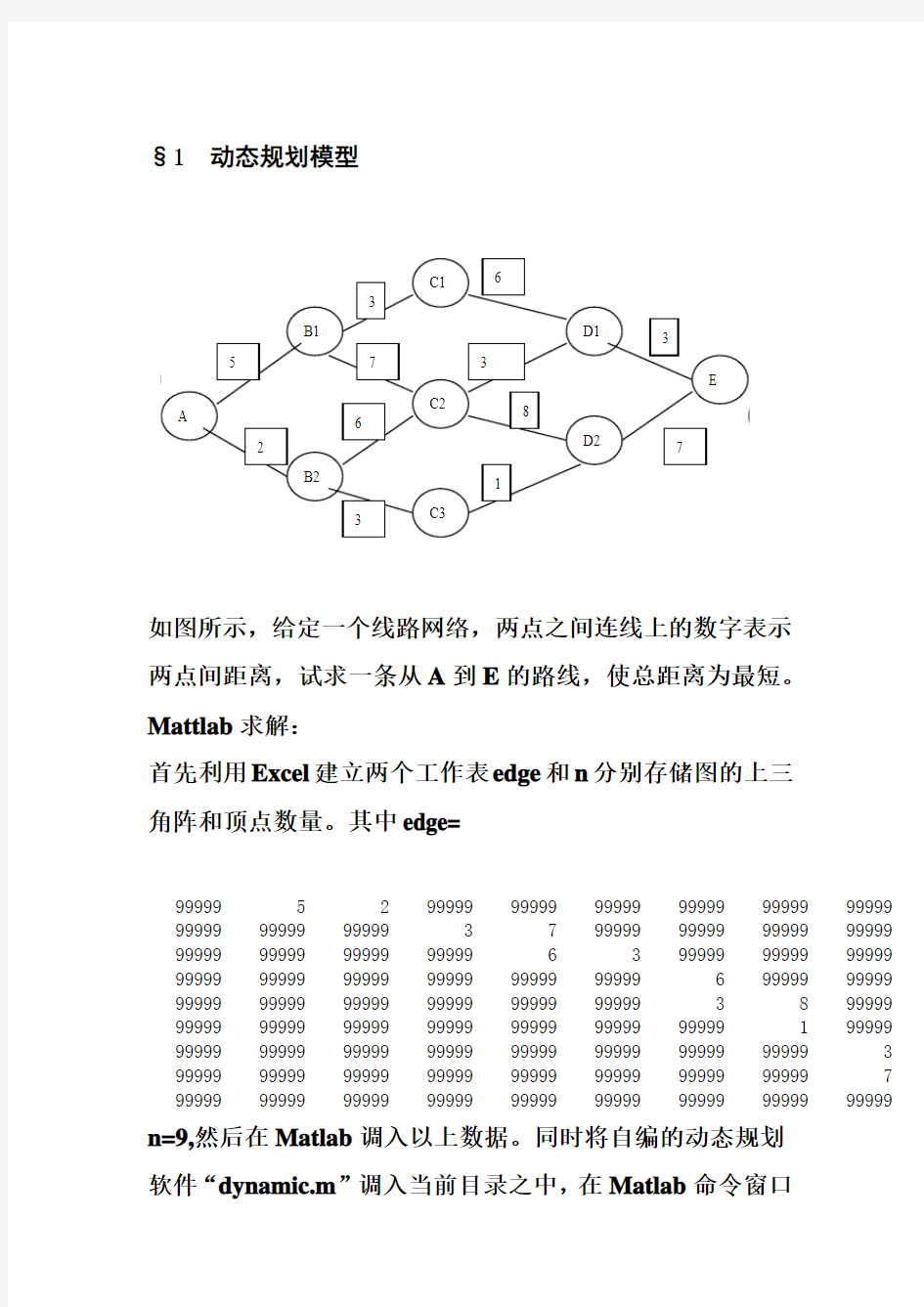
如图所示,给定一个线路网络,两点之间连线上的数字表示
两点间距离,试求一条从A到E的路线,使总距离为最短。Mattlab求解:
首先利用Excel建立两个工作表edge和n分别存储图的上三
角阵和顶点数量。其中edge=
99999 5 2 99999 99999 99999 99999 99999 99999 99999 99999 99999 3 7 99999 99999 99999 99999 99999 99999 99999 99999 6 3 99999 99999 99999 99999 99999 99999 99999 99999 99999 6 99999 99999 99999 99999 99999 99999 99999 99999 3 8 99999 99999 99999 99999 99999 99999 99999 99999 1 99999 99999 99999 99999 99999 99999 99999 99999 99999 3 99999 99999 99999 99999 99999 99999 99999 99999 7 99999 99999 99999 99999 99999 99999 99999 99999 99999
n=9,然后在Matlab调入以上数据。同时将自编的动态规划
软件“dynamic.m”调入当前目录之中,在Matlab命令窗口
输入dynamic,回车后则在窗口显示出路径Path 和距离distance
§2 最小生成树
例1 某工厂要架设局域网联通工厂各个部门。已知工厂有7个部门,各个部门间铺设网线的距离如上图所示,计算出铺设网线的最短距离。 Matlab 的算法:
首先,将上图的邻接矩阵存储为G ,顶点数存储为N ;即:G=
99999 50 60 99999 99999 99999 99999 50 99999 99999 65 40 99999 99999 60 99999 99999 52 99999 99999 45 99999 65 52 99999 50 30 42 99999 40 99999 50 99999 70 99999 99999 99999 99999 30 70 99999 99999 99999
99999 45 42 99999 99999 99999
2
5
3
1
4
7
6
50
60 45
65
52
40
50
70
30
42
N=7,然后调入到Matlab 命令窗口中,另外将自编程序prim.m 存放到当前目录中,最后,输入prim 后回车。打开变量result ,即可看见最小生成树的连接方式。
例2 某六个城市之间的道路网如下图所示,要求沿着已知长度的道路联结六个城市的电话线网,使得电话线的总长度最短。
§3 最短路
例3 如下图所示的交通网络,边上的权重代表城市之间的距离,求城市1的最短路径。
v 5
v 6
v 2
v 4
6
2
7
5
3
5 4 4
1 V1
v 3
Matlab的算法:
首先,将上图的邻接矩阵存储为G,顶点数存储为N;即:G=
99999 10 99999 30 100
99999 99999 50 99999 99999
99999 99999 99999 99999 10
99999 99999 20 99999 99999
99999 99999 99999 60 99999
N=5,然后调入到Matlab命令窗口中,另外将自编程序dijkstra.m存放到当前目录中,最后,输入dijkstra后回车。打开变量path,即可看见最最短路的连接方式。
例4: 如下图所示的单行线交通网,每个弧旁边的数字表示这条单行线的长度。现在有一个人要从v1出发,经过这个交通网到达v8,要寻求是总路程最短的线路。
v 6
v 4
v 8 9
1
V 1
v 5
§4 网络最大流
如上图所示,每条弧相关的括号中,第一个数据表示该条弧的容量,第二个表示该弧流量,最大流量必须满足以下条件的限制: 1. 可行性条件:
xi>=0, x1<=3, x2<=5, x3<=1, x4<=4, x5<=1,
x6<=2, x7<=5, x8<=2
2.始点Vs和收点Vt容量的要求:
X1+x2<=8, x7+x8<=7
3.流量平衡要求
总流入量和总流出量相同:
X1+x2-x7-x8=0
4.内节点流入量和流出量相同:
X1+x5-x3-x4=0
X2+x3-x6=0
X6-x5-x8=0
X4-x7=0
目标函数为:max z=x1+x2
软件求解:Matlab函数:linprog(线性规划), ip(整数规划)Lindo软件求解结果如下:
OBJECTIVE FUNCTION V ALUE
1) 5.000000
V ARIABLE V ALUE REDUCED COST
X1 3.000000 0.000000
X2 2.000000 0.000000
X3 0.000000 1.000000
X4 3.000000 0.000000
X5 0.000000 0.000000
X6 2.000000 0.000000
X7 3.000000 0.000000
X8 2.000000 0.000000
例5.如下图所示为一城市水管网络流量图,试求一条从始点Vs 到收点Vt的最大流
§5最小费用最大流问题
网络最大流只考虑了流量的问题,实际在运用时还有“费用”因素存在。人们总是希望在得到最大流的同时,使费用最少,这就是最小费用最大流问题
如上图所示:括号里第一个数字表示最大容量,第二个数字表示单位流量的费用,第三个表示待求实际流量。
从前面可知,网络的最大流问题的解不唯一,我们可以分别计算两次线性规划求出最小费用最大流,求解过程如下:
v t
24v s
(1)建立求解最大流的线性规划模型,求出最大流
(2)将求出的最大流作为已知限制条件,构建求解最小费用最大流的线性规划模型。
由前面已经求出最大流为5,则将x1+x2=5作为增加的约束条件,另将目标函数改为:
Min z=2x1+3x2+x3+5x4+2x5+4x6+x7+2x8
即线性模型如下:
Min 2x1+3x2+x3+5x4+2x5+4x6+x7+2x8
st
x1<=3
x2<=5
x3<=1
x4<=4
x5<=1
x6<=2
x7<=5
x8<=2
X1+x2<=8
x7+x8<=7
X1+x2-x7-x8=0
X1+x5-x3-x4=0
X2+x3-x6=0
X6-x5-x8=0
X4-x7=0
x1+x2=5
运用Lindo求解,可得结果如下:
OBJECTIVE FUNCTION V ALUE
1) 42.00000
V ARIABLE V ALUE REDUCED COST
X1 3.000000 0.000000
X2 2.000000 0.000000
X3 0.000000 1.000000
X4 3.000000 0.000000
X5 0.000000 6.000000
X6 2.000000 0.000000 X7 3.000000 0.000000 X8 2.000000 0.000000
(数学建模教材)4第四章动态规划
第四章动态规划 §1 引言 1.1 动态规划的发展及研究内容 动态规划(dynamic programming)是运筹学的一个分支,是求解决策过程(decision process)最优化的数学方法。20 世纪50 年代初R. E. Bellman 等人在研究多阶段决策过程(multistep decision process)的优化问题时,提出了著名的最优性原理(principle of optimality),把多阶段过程转化为一系列单阶段问题,逐个求解,创立了解决这类过程优化问题的新方法—动态规划。1957 年出版了他的名著《Dynamic Programming》,这是该领域的第一本著作。 动态规划问世以来,在经济管理、生产调度、工程技术和最优控制等方面得到了广泛的应用。例如最短路线、库存管理、资源分配、设备更新、排序、装载等问题,用动态规划方法比用其它方法求解更为方便。 虽然动态规划主要用于求解以时间划分阶段的动态过程的优化问题,但是一些与时间无关的静态规划(如线性规划、非线性规划),只要人为地引进时间因素,把它视为多阶段决策过程,也可以用动态规划方法方便地求解。 应指出,动态规划是求解某类问题的一种方法,是考察问题的一种途径,而不是一种特殊算法(如线性规划是一种算法)。因而,它不象线性规划那样有一个标准的数学表达式和明确定义的一组规则,而必须对具体问题进行具体分析处理。因此,在学习时,除了要对基本概念和方法正确理解外,应以丰富的想象力去建立模型,用创造性的技巧去求解。 例1 最短路线问题 图1 是一个线路网,连线上的数字表示两点之间的距离(或费用)。试寻求一条由A 到G距离最短(或费用最省)的路线。 图1 最短路线问题 例2 生产计划问题 工厂生产某种产品,每单位(千件)的成本为1(千元),每次开工的固定成本为3 (千元),工厂每季度的最大生产能力为6(千件)。经调查,市场对该产品的需求量第一、二、三、四季度分别为2,3,2,4(千件)。如果工厂在第一、二季度将全年的需求都生产出来,自然可以降低成本(少付固定成本费),但是对于第三、四季度才能上市的产品需付存储费,每季每千件的存储费为0.5(千元)。还规定年初和年末这种产品均无库存。试制定一个生产计划,即安排每个季度的产量,使一年的总费用(生产成本和存储费)最少。 1.2 决策过程的分类根据过程的时间变量是离散的还是连续的,分为离散时间 决策过程(discrete-time -56-
严蔚敏版数据结构课后习题答案-完整版
第1章绪论 1.1 简述下列术语:数据,数据元素、数据对象、数据结构、存储结构、数据类型和抽象数据类型。 解:数据是对客观事物的符号表示。在计算机科学中是指所有能输入到计算机中并被计算机程序处理的符号的总称。 数据元素是数据的基本单位,在计算机程序中通常作为一个整体进行考虑和处理。 数据对象是性质相同的数据元素的集合,是数据的一个子集。 数据结构是相互之间存在一种或多种特定关系的数据元素的集合。 存储结构是数据结构在计算机中的表示。 数据类型是一个值的集合和定义在这个值集上的一组操作的总称。 抽象数据类型是指一个数学模型以及定义在该模型上的一组操作。是对一般数据类型的扩展。 1.2 试描述数据结构和抽象数据类型的概念与程序设计语言中数据类型概念的区别。 解:抽象数据类型包含一般数据类型的概念,但含义比一般数据类型更广、更抽象。一般数据类型由具体语言系统内部定义,直接提供给编程者定义用户数据,因此称它们为预定义数据类型。抽象数据
类型通常由编程者定义,包括定义它所使用的数据和在这些数据上所进行的操作。在定义抽象数据类型中的数据部分和操作部分时,要求只定义到数据的逻辑结构和操作说明,不考虑数据的存储结构和操作的具体实现,这样抽象层次更高,更能为其他用户提供良好的使用接口。 1.3 设有数据结构(D,R),其中 {}4,3,2,1d d d d D =,{}r R =,()()(){}4,3,3,2,2,1d d d d d d r = 试按图论中图的画法惯例画出其逻辑结构图。 解: 1.4 试仿照三元组的抽象数据类型分别写出抽象数据类型复数和有理数的定义(有理数是其分子、分母均为自然数且分母不为零的分数)。 解: ADT Complex{ 数据对象:D={r,i|r,i 为实数} 数据关系:R={
动态规划
动态规划 一、背包问题 1、0/1背包[问题背景及描述] Bessie 正在减肥,所以她规定每天不能吃超过C (10 <= C <= 35,000)卡路里的食物。农民John 在戏弄她,在她面前放了B (1 <= B <= 21) 捅食物。每桶内都有某个单位卡路里(范围:1..35,000)的食物(不一定相同)。Bessie 没有自控能力,一旦她开始吃一个桶中的食物,她就一定把这桶食物全部吃完。Bessie 对于组合数学不大在行。请确定一个最优组合,使得可以得到最多的卡路里,并且总量不超过C。例如,总量上限是40卡路里,6 桶食物分别含有7, 13, 17, 19, 29, 和31卡路里的食物。Bessie可以吃7 + 31 = 38卡路里,但是可以获取得更多:7 + 13 + 19 = 39卡路里。没有更好的组合了。 [输入] 共两行。 第一行,两个用空格分开的整数:C 和 B 第二行,B个用空格分开的整数,分别表示每桶中食物所含的卡路里。 [输出] 共一行,一个整数,表示Bessie能获得的最大卡路里,使她不违反减肥的规则。 [输入样例] 40 6 7 13 17 19 29 31 [样例输出] 39 2、固定次数的0/1背包 有N种物品和一个容量为V的背包。第i种物品最多有n[i]件可用,每件体积是c[i],价值是w[i]。求解将哪些物品装入背包可使这些物品的体积总和不超过背包容量,且价值总和最大。V〈30000,n〈100,n[i]〈50。 输入输出格式: 第1行,两个用空格分开的整数:v 和n 第2—n+1行,每件体积是c[i],价值是w[i],最多有n[i]件可用 [输入样例] 40 2 10 20 5 20 30 6 [样例输出] 80 3、重复背包货币系统money 母牛们不但创建了他们自己的政府而且选择了建立了自己的货币系统。[In their own
电子科技大学研究生试题《图论及其应用》(参考答案)
电子科技大学研究生试题 《图论及其应用》(参考答案) 考试时间:120分钟 一.填空题(每题3分,共18分) 1.4个顶点的不同构的简单图共有__11___个; 2.设无向图G 中有12条边,已知G 中3度顶点有6个,其余顶点的度数均小于3。则G 中顶点数至少有__9___个; 3.设n 阶无向图是由k(k ?2)棵树构成的森林,则图G 的边数m= _n-k____; 4.下图G 是否是平面图?答__是___; 是否可1-因子分解?答__是_. 5.下图G 的点色数=)(G χ______, 边色数=')(G χ__5____。 图G 二.单项选择(每题3分,共21分) 1.下面给出的序列中,是某简单图的度序列的是( A ) (A) (11123); (B) (233445); (C) (23445); (D) (1333). 2.已知图G 如图所示,则它的同构图是( D ) 3. 下列图中,是欧拉图的是( D ) 4. 下列图中,不是哈密尔顿图的是(B ) 5. 下列图中,是可平面图的图的是(B ) A C D A B C D
6.下列图中,不是偶图的是( B ) 7.下列图中,存在完美匹配的图是(B ) 三.作图(6分) 1.画出一个有欧拉闭迹和哈密尔顿圈的图; 2.画出一个有欧拉闭迹但没有哈密尔顿圈的图; 3.画出一个没有欧拉闭迹但有哈密尔顿圈的图; 解: 四.(10分)求下图的最小生成树,并求其最小生成树的权值之和。 解:由克鲁斯克尔算法的其一最小生成树如下图: 权和为:20. 五.(8分)求下图G 的色多项式P k (G). 解:用公式 (G P k -G 的色多项式: )3)(3)()(45-++=k k k G P k 。 六.(10分) 22,n 3个顶点的度数为3,…,n k 个顶点的度数为k ,而其余顶点的度数为1,求1度顶点的个数。 解:设该树有n 1个1度顶点,树的边数为m. 一方面:2m=n 1+2n 2+…+kn k 另一方面:m= n 1+n 2+…+n k -1 v v 1 3 图G
第四章 数学规划模型
第四章 数学规划模型 【教学目的】:深刻理解线性规划,非线性规划,动态规划方法建模的基本特点,并能熟练建立一些实际问题的数学规划模型;熟练掌握用数学软件(Matlab ,Lindo ,Lingo 等)求解优化问题的方法。 【教学重点难点】: 教学重点:线性规划和非线性规划的基本概念和算法,解决数学规划问题的一般思路和 方法,线性规划模型、整数规划模型、非线性规划模型的构建及其Matlab 与Lingo 实现。 教学难点:区分线性规划模型和非线性模型适用的实际问题,以及何时采用线性模型, 何时采用非线性模型,线性模型与非线性模型的转化。 【课时安排】:10学时 【教学方法】:采用多媒体教学手段,配合实例教学法,通过对典型例题的讲解启发学生思维,并给与学生适当的课后思考讨论的时间,加深知识掌握的程度。安排一定课时的上机操作。 【教学内容】: 在众多实际问题中,常常要求决策(确定)一些可控制量的值,使得相关的量(目标)达到最佳(最大或最小)。这些问题就叫优化问题,通常需要建立规划模型进行求解。称这些可控制量为决策变量,相关的目标量为目标函数;一般情况下,决策变量x 的取值是受限制的,不妨记为x ∈Ω,Ω称为可行域,优化问题的数学模型可表示为 Max(或Min)f(x), x ∈Ω 一般情况下,x 是一个多元变量,f(x)为多元函数,可行域比较复杂,一般可用一组不等式组来表示,这样规划问题的一般形式为 () x Min f x . ()0,1,2,,i st g x i m ≤= 虽然,该问题属于多元函数极值问题,但变量个数和约束条件比较多,一般不能用微分法进行解决,而通过规划方法来求解;这里讨论的不是规划问题的具体算法,主要是讨论如何将一个实际问题建立优化模型,并利用优化软件包进行求解。 根据目标函数和约束函数是否为线性,将规划模型分为线性规划和非线性规划。 4.1线性规划 线性规划(LP)研究的实际问题多种多样的,它在工农业生产、经济管理、优化设计与控
数据结构课后习题答案
数据结构习题集答案 第1章绪论 1.1 简述下列术语:数据,数据元素、数据对象、数据结构、存储结构、数据类型和抽象数据类型。 解:数据是对客观事物的符号表示。在计算机科学中是指所有能输入到计算机中并被计算机程序处理的符号的总称。 数据元素是数据的基本单位,在计算机程序中通常作为一个整体进行考虑和处理。 数据对象是性质相同的数据元素的集合,是数据的一个子集。 数据结构是相互之间存在一种或多种特定关系的数据元素的集合。存储结构是数据结构在计算机中的表示。 数据类型是一个值的集合和定义在这个值集上的一组操作的总称。抽象数据类型是指一个数学模型以及定义在该模型上的一组操作。是对一般数据类型的扩展。 1.2 试描述数据结构和抽象数据类型的概念与程序设计语言中数据类型概念的区别。 解:抽象数据类型包含一般数据类型的概念,但含义比一般数据类型更广、更抽象。一般数据类型由具体语言系统内部定义,直接提供给编程者定义用户数据,因此称它们为预定义数据类型。抽象数据
类型通常由编程者定义,包括定义它所使用的数据和在这些数据上所进行的操作。在定义抽象数据类型中的数据部分和操作部分时,要求只定义到数据的逻辑结构和操作说明,不考虑数据的存储结构和操作的具体实现,这样抽象层次更高,更能为其他用户提供良好的使用接口。 1.3 设有数据结构(D,R),其中 {}4,3,2,1d d d d D =,{}r R =,()()(){}4,3,3,2,2,1d d d d d d r = 试按图论中图的画法惯例画出其逻辑结构图。 解: 1.4 试仿照三元组的抽象数据类型分别写出抽象数据类型复数和有理数的定义(有理数是其分子、分母均为自然数且分母不为零的分数)。 解:ADT Complex{ 数据对象:D={r,i|r,i 为实数} 数据关系:R={
图论及其应用答案电子科大
图论及其应用答案电子科 大 This model paper was revised by the Standardization Office on December 10, 2020
习题三: 证明:e是连通图G 的割边当且仅当V(G)可划分为两个子集V1和V2,使对任意u ∈V 1及v ∈V 2, G 中的路(u,v)必含e . 证明:充分性: e是G的割边,故G ?e至少含有两个连通分支,设V 1是其中一个连通分支的顶点集,V 2是其余分支的顶点集,对12,u V v V ?∈?∈,因为G中的u ,v不连通, 而在G中u与v连通,所以e在每一条(u ,v )路上,G中的(u ,v )必含e。 必要性:取12,u V v V ∈∈,由假设G中所有(u ,v )路均含有边e,从而在G ?e中不存在从 u与到v的路,这表明G不连通,所以e 是割边。 3.设G 是阶大于2的连通图,证明下列命题等价: (1) G 是块 (2) G 无环且任意一个点和任意一条边都位于同一个圈上; (3) G 无环且任意三个不同点都位于同一条路上。 (1)→(2): G是块,任取G的一点u,一边e,在e边插入一点v,使得e成为两条边,由此得到新图G 1,显然G 1的是阶数大于3的块,由定理,G中的u,v 位于同一个圈上,于是G 1中u 与边e都位于同一个圈上。 (2)→(3): G无环,且任意一点和任意一条边都位于同一个圈上,任取G的点u ,边e ,若u在e 上,则三个不同点位于同一个闭路,即位于同一条路,如u不在e上,由定理,e的两点在同一个闭路上,在e边插入一个点v ,由此得到新图G 1,显然G 1的是阶数大于3的块,则两条边的三个不同点在同一条路上。 (3)→(1): G连通,若G不是块,则G中存在着割点u,划分为不同的子集块V 1, V 2, V 1, V 2无环,12,x v y v ∈∈,点u在每一条(x ,y )的路上,则与已知矛盾,G是块。 7.证明:若v 是简单图G 的一个割点,则v 不是补图G ?的割点。 证明:v是单图G的割点,则G ?v有两个连通分支。现任取x ,y ∈V (G ?v ), 如果x ,y 不在G ?v的同一分支中,令u是与x ,y处于不同分支的点,那么,x ,与y在G ?v的补图中连通。若x ,y在G ?v的同一分支中,则它们在G ?v的补图中邻接。所以,若v是G 的割点,则v不是补图的割点。 12.对图3——20给出的图G1和G2,求其连通度和边连通度,给出相应的最小点割和最小边割。 解:()12G κ= 最小点割 {6,8} 1()2G λ= 最小边割{(6,5),(8,5)}
动态规划算法原理与的应用
动态规划算法原理及其应用研究 系别:x x x 姓名:x x x 指导教员: x x x 2012年5月20日
摘要:动态规划是解决最优化问题的基本方法,本文介绍了动态规划的基本思想和基本步骤,并通过几个实例的分析,研究了利用动态规划设计算法的具体途径。关键词:动态规划多阶段决策 1.引言 规划问题的最终目的就是确定各决策变量的取值,以使目标函数达到极大或极小。在线性规划和非线性规划中,决策变量都是以集合的形式被一次性处理的;然而,有时我们也会面对决策变量需分期、分批处理的多阶段决策问题。所谓多阶段决策问题是指这样一类活动过程:它可以分解为若干个互相联系的阶段,在每一阶段分别对应着一组可供选取的决策集合;即构成过程的每个阶段都需要进行一次决策的决策问题。将各个阶段的决策综合起来构成一个决策序列,称为一个策略。显然,由于各个阶段选取的决策不同,对应整个过程可以有一系列不同的策略。当过程采取某个具体策略时,相应可以得到一个确定的效果,采取不同的策略,就会得到不同的效果。多阶段的决策问题,就是要在所有可能采取的策略中选取一个最优的策略,以便得到最佳的效果。动态规划是一种求解多阶段决策问题的系统技术,可以说它横跨整个规划领域(线性规划和非线性规划)。在多阶段决策问题中,有些问题对阶段的划分具有明显的时序性,动态规划的“动态”二字也由此而得名。动态规划的主要创始人是美国数学家贝尔曼(Bellman)。20世纪40年代末50年代初,当时在兰德公司(Rand Corporation)从事研究工作的贝尔曼首先提出了动态规划的概念。1957年贝尔曼发表了数篇研究论文,并出版了他的第一部著作《动态规划》。该著作成为了当时唯一的进一步研究和应用动态规划的理论源泉。在贝尔曼及其助手们致力于发展和推广这一技术的同时,其他一些学者也对动态规划的发展做出了重大的贡献,其中最值得一提的是爱尔思(Aris)和梅特顿(Mitten)。爱尔思先后于1961年和1964年出版了两部关于动态规划的著作,并于1964年同尼母霍思尔(Nemhauser)、威尔德(Wild)一道创建了处理分枝、循环性多阶段决策系统的一般性理论。梅特顿提出了许多对动态规划后来发展有着重要意义的基础性观点,并且对明晰动态规划路径的数
数据结构课后习题详解(超完整,超经典)
第1章 绪论 1.1 简述下列术语:数据,数据元素、数据对象、数据结构、存储结构、数据类型和抽象数据类型。 解:数据是对客观事物的符号表示。在计算机科学中是指所有能输入到计算机中并被计算机程序处理的符号的总称。 数据元素是数据的基本单位,在计算机程序中通常作为一个整体进行考虑和处理。 数据对象是性质相同的数据元素的集合,是数据的一个子集。 数据结构是相互之间存在一种或多种特定关系的数据元素的集合。 存储结构是数据结构在计算机中的表示。 数据类型是一个值的集合和定义在这个值集上的一组操作的总称。 抽象数据类型是指一个数学模型以及定义在该模型上的一组操作。是对一般数据类型的扩展。 1.2 试描述数据结构和抽象数据类型的概念与程序设计语言中数据类型概念的区别。 解:抽象数据类型包含一般数据类型的概念,但含义比一般数据类型更广、更抽象。一般数据类型由具体语言系统内部定义,直接提供给编程者定义用户数据,因此称它们为预定义数据类型。抽象数据类型通常由编程者定义,包括定义它所使用的数据和在这些数据上所进行的操作。在定义抽象数据类型中的数据部分和操作部分时,要求只定义到数据的逻辑结构和操作说明,不考虑数据的存储结构和操作的具体实现,这样抽象层次更高,更能为其他用户提供良好的使用接口。 1.3 设有数据结构(D,R),其中 {}4,3,2,1d d d d D =,{}r R =,()()(){}4,3,3,2,2,1d d d d d d r = 试按图论中图的画法惯例画出其逻辑结构图。 解: 1.4 试仿照三元组的抽象数据类型分别写出抽象数据类型复数和有理数的定义(有理数是其分子、分母均为自然数且分母不为零的分数)。 解: ADT Complex{ 数据对象:D={r,i|r,i 为实数} 数据关系:R={
(完整版)数据结构详细教案——图
数据结构教案第七章图
第7章图 【学习目标】 1.领会图的类型定义。 2.熟悉图的各种存储结构及其构造算法,了解各种存储结构的特点及其选用原则。 3.熟练掌握图的两种遍历算法。 4.理解各种图的应用问题的算法。 【重点和难点】 图的应用极为广泛,而且图的各种应用问题的算法都比较经典,因此本章重点在于理解各种图的算法及其应用场合。 【知识点】 图的类型定义、图的存储表示、图的深度优先搜索遍历和图的广度优先搜索遍历、无向网的最小生成树、最短路径、拓扑排序、关键路径 【学习指南】 离散数学中的图论是专门研究图性质的一个数学分支,但图论注重研究图的纯数学性质,而数据结构中对图的讨论则侧重于在计算机中如何表示图以及如何实现图的操作和应用等。图是较线性表和树更为复杂的数据结构,因此和线性表、树不同,虽然在遍历图的同时可以对顶点或弧进行各种操作,但更多图的应用问题如求最小生成树和最短路径等在图论的研究中都早已有了特定算法,在本章中主要是介绍它们在计算机中的具体实现。这些算法乍一看都比较难,应多对照具体图例的存储结构进行学习。而图遍历的两种搜索路径和树遍历的两种搜索路径极为相似,应将两者的算法对照学习以便提高学习的效益。 【课前思考】 1. 你有没有发现现在的十字路口的交通灯已从过去的一对改为三对,即每个方向的直行、左拐和右拐能否通行都有相应的交通灯指明。你能否对某个丁字路口的6条通路画出和第一章绪论中介绍的"五叉路口交通管理示意图"相类似的图? 2. 如果每次让三条路同时通行,那么从图看出哪些路可以同时通行? 同时可通行的路为:(AB,BC,CA),(AB,BC,BA),(AB,AC,CA),(CB,CA,BC)
图论及其应用
图和子图 图 图 G = (V, E), 其中 V = {νv v v ,......,,21} V ---顶点集, ν---顶点数 E = {e e e 12,,......,ε} E ---边集, ε---边数 例。 左图中, V={a, b,......,f}, E={p,q, ae, af,......,ce, cf} 注意, 左图仅仅是图G 的几何实现(代表), 它们有无穷多个。真正的 图G 是上面所给出式子,它与顶点的位置、边的形状等无关。不过今后对两者将经常不加以区别。 称 边 ad 与顶点 a (及d) 相关联。也称 顶点 b(及 f) 与边 bf 相关联。 称顶点a 与e 相邻。称有公共端点的一些边彼此相邻,例如p 与af 。 环(loop ,selfloop ):如边 l 。 棱(link ):如边ae 。 重边:如边p 及边q 。 简单图:(simple graph )无环,无重边 平凡图:仅有一个顶点的图(可有多条环)。 一条边的端点:它的两个顶点。 记号:νε()(),()().G V G G E G ==。 习题 1.1.1 若G 为简单图,则 εν≤?? ?? ?2 。 1.1.2 n ( ≥ 4 )个人中,若每4人中一定有一人认识其他3人,则一定有一 人认识其他n-1人。 同构 在下图中, 图G 恒等于图H , 记为 G = H ? V (G)=V(H), E(G)=E(H)。 图G 同构于图F ? V(G)与V(F), E(G)与E(F)之间各存在一一对应关系,且这二对应关系保持关联关系。 记为 G ?F 。 注 往往将同构慨念引伸到非标号图中,以表达两个图在结构上是否相同。 d e f G = (V, E) y z w c G =(V , E ) w c y z H =(V ?, E ?) ?a ? c ? y ? e ?z ? F=(V ??, E ??)
数据结构总结
转载自South_wind的专栏 常见的数据结构运用总结 考虑到Obsidian三个成员的擅长领域,这段时间都在做杂题,算是学习各种算法吧,趁现在休息的时间,而且大家马上要备战今年的比赛了,写写自己专攻方面的一些心得吧 扯开线段树、平衡树这些中高级的东西,先说说基础的数据结构 栈 算是代码量最小的数据结构?出栈进栈都只有一句话而已 常见用途: 消去一个序列中的相同元素(做法大家应该都知道了吧,见过很多次了) 维护一个单调的序列(所谓的单调栈,dp的决策单调?) 表达式求值(经典的栈运用,如果使用的很熟悉的话,可以处理一元、二元运算,不过最近没见过类似的题目了) 用于辅助其他算法(计算几何中的求凸包) 队列 队列应该还是很常见的数据结构了,如果专攻图论的话,spfa应该是写烂了的 这里说到的队列,是狭义的普通的队列和循环队列,不包括后面讲的一些变形 注意循环队列的写法,尽量不要使用取模运算,不然的话,遇到不厚道的出题者,可以把取模的循环队列卡到死 常见用途: 主要用于辅助其他算法,比如说spfa,bfs等(建议习惯用stl的孩子手写queue,毕竟就几行代码而已,偷懒会付出代价的。。。) 双端队列 如果写dp写的多的话,这个东西应该还是算是比较基础的东西了,双端队列多用于维护一个满足单调性的队列 还是建议手写,stl的deque使用块状链表写的,那东西的复杂度是O(Nsqrt(N))的,不要被迷惑了。 常见用途: dp的单调性优化,包括单调队列优化和斜率优化,都要用到这个结构 计算几何中的算法优化,比如半平面交 树的分治问题中利用单调队列减少转移复杂度 链表Dancing Links 写图论的不要告诉我不会写这货,链表可以写单双向,循环非循环的,高级点儿的可以考虑十字链表,麻花链表 不过链表可以说是树形结构的基础,如果这个掌握的不好,那么树形结构写起来就会很纠结 链表的优势在于可以O(1)的插入删除,如果要求插入的位置只是在序列的两端的话,这个数据结构是最方便的了(无视双端队列) hash表就是用链表实现的,熟悉hash的同学可以试试看怎么使你的hash效率提高
图论及其应用(精)
图论及其应用 学时:40 学分:2 课程属性:专业选修课开课单位:理学院 先修课程:高等代数后续课程:无 一、课程的性质 《图论及其应用》是数学与应用数学专业的专业选修课程。 二、教学目的 通过教学,使学生掌握图论及其算法的基本理论和基本技巧,初步掌握图论及其算法的基本应用手段、基本算法设计及编程,并能用所学理论解决一些应用问题。 三、教学内容 1.图的基本概念 2.图的连通性 3.树的基本性质及其应用 4.Euler Graphs and Hamilton Graphs with Applications 5.平面图性质 6.匹配,求最大匹配算法及应用 7.图的染色及应用 8.极图理论 四、学时分配 章课程内容学时 1 图的基本概念 4 2 图的连通性 6 3 树的基本性质及其应用 6 4 Euler Graphs and Hamilton Graphs with Applications 4 5 平面图性质 6 6 匹配,求最大匹配算法及应用 6
7 图的染色及应用 4 8 极图理论 4 合计40 五、教学方式 本课程采用多媒体课堂讲授,结合实际范例深入浅出讲解讨论。 六、考核方式 本课程考核采用平时与期末考核相结合的办法,特别注重平时的考核,作业采用简单练习、论文等形式,期末考试采用简单考题或论文形式。 七、教材及教学参考书 参考教材: [1] J.A.Bondy and U.S.R.Murty. Graph Theory with Applications, The Macmillan Press LTD,1976. [2] 蒋长浩.图论与网络流.北京:中国林业出版社,2000. 参考书目: [1] Bela Bollobas.Modern Graph Theory(现代图论,影印版).北京:科学出版社,2001. [2] 殷剑宏、吴开亚.图论及其算法.合肥:中国科学技术大学出版社,2003. [3] 谢金星、邢文训.网络优化.北京:清华大学出版社.2000. [4] 程理民、吴江、张玉林.运筹学模型与方法教程.北京:清华大学出版社,2000. [5] 三味工作室.SPSS V10.0 for Windows 实用基础教程.北京:北京希望电子出版社2001. [6] 孙魁明、张海彤.Mathematica工具软件大全.北京:中国铁道出版社,1994. [7] 楼顺天、于卫、闫华梁.MATLAB程序设计语言.西安:西安电子科技大学出版社,1997.八、教学基本内容及要求 第一章图的基本概念 1.教学基本要求 掌握的图的基本概念、特殊图概念,了解最短路问题。 2.教学具体内容 图的基本概念,路和圈,最短路问题。
参考习题 第四章 决策
精心整理 第四章决策 一、单项选择题 1、有一种说法认为"管理就是决策",这实际上意味着:(C ) A.对于管理者来说只要善于决策就一定能够获得成功 B.管理的复杂性和挑战性都是由于决策的复杂性而导致的 C.决策能力对于管理的成功具有特别重要的作用 D.管理首先需要的就是面对复杂的环境作出决策 2 A.3、根据"A.B.C.D.4(1)5 A.B.C.D.620A.B.C.D.这不是真正意义上的授权而只是一种工作落实 7、某企业原先重大战略决策的基本过程是由各部门(如财务部、销售部、生产部、人事部等)独立把各自部门的情况写成报告送给总经理,再由总经理综合完成有关的战略方案。后来,对此过程作了些调整,这就是:总经理收到各部门呈上的报告后,有选择地找些管理人员来磋商,最后由自己形成决策。再后来,总经理在收到报告后,就把这些报告交给一个有各部门人员共同参与组成的委员会,通过委员会全体成员的面对面讨论,最终形成有关决策。对此你的看法是:(C) A.这种处理方式的改变对企业战略决策以及其它方面的工作没什么影响 B.这种处理方式的改变可以大大提高企业决策的效率 C.这种处理方式的改变增加了信息沟通的范围,可带来更多的成员满意感 D.这种处理方式的改变提高了企业上下信息沟通的效率 8、现在社会上销售彩票的很多。一家三口在抽奖时,常常喜欢让孩子来抽,请问这是遵循了什么决策原则?(A )
A.乐观原则 B.悲观原则 C.折衷原则 D.最小最大后悔值原则 9、某企业集团拟投资开发新产品,现有两个方案,假定其开发费用相同。开发甲产品,估计投产后,市场竞争不激烈时每年可获利150万元,市场竞争激烈时每年亏损50万元。开发乙产品,估计投产后无论市场竞争激烈与否,每年均可获利70万元。根据预测,这两种拟开发的产品投产后,出现市场竞争不激烈情况的概率为0.6,出现市场竞争激烈情况的概率为0.4。如果只能在这两个方案中选一个,你的评价是什么?(B) A.开发甲产品比开发乙产品好。 B.开发乙产品比开发甲产品好。 C.开发甲产品与开发乙产品没什么差别。 D.根据以上资料尚无法下结论。 10、在以下X、Y和Z三种方案中,哪一个方案最好?(B) A.X 11 A. B. C. D. 12 A. 13、 A. 13 A. C. 14 A.关于公司各部门办公电脑的分配方案 D.对一位客户投诉的例行处理 C.对一家主要竞争对手突然大幅削价作出反应 D.对一位公司内部违纪职工按规章进行处理 15、在制定计划时,为了有效地确定前提条件,应当:(A) A.找出并着重研究那些关键性的、战略性的的提条件, B.要准备不止一套的备选前提条件,以供出现偶发事件时应急使用。 C.所选择的各前提条件相互间必须协调一致。 D.对以上3条作综合考虑。 16、有一个大家熟悉的商务趣闻:甲乙两家鞋业公司的经理各派了一位市场调查员去某岛调查,发现岛上的居民从来不穿鞋。结果甲公司的调查员向公司报告称自己发现厂一个新市场,进而开拓了市场;而乙公司的调查员则
两种算法实现最小生成树
数据结构上机实验报告题目:两种算法实现最小生成树 学生姓名 学生学号 学院名称计算机学院 专业计算机科学与技术 时间 2014.12.9
目录 第一章需求分析 (1) 1.1 原题表述 (1) 1.2 问题解决方案 (1) 第二章概要设计 (2) 2.1 抽象数据类型 (2) 2.2 主要算法描述 (2) 2.1.1 Prim算法实现 (2) 2.1.2 Kruskal算法实现 (3) 2.3 主要算法分析 (3) 第三章概要设计 (4) 3.1 程序代码 (4) 3.1.1 Prim算法实现 (4) 3.1.2 Kruskal算法实现 (6) 第四章调试分析 (9) 4.1 出现的问题及解决方法 (9) 第五章测试分析 (10) 5.1 测试样例 (10)
第一章需求分析 1.1 原题表述 某市为实现交通畅行,计划使全市中的任何两个村庄之间都实现公路互通,虽然不需要直接的公路相连,只要能够间接可达即可。现在给出了任意两个城镇之间修建公路的费用列表,以及此两个城镇之间的道路是否修通的状态,要求编写程序求出任意两村庄都实现公路互通的最小成本。 输入参数:测试输入包含若干测试用例。每个测试用例的第1行给出村庄数目N ( 1< N < 100 );随后的 N(N-1)/2 行对应村庄间道路的成本及修建状态,每行给4个正整数,分别是两个村庄的编号(从1编号到N),此两村庄间道路的成本,以及修建状态:1表示已建,0表示未建。当N为0时输入结束。 输出参数:每个测试用例占输出的一行,输出实现后所需的最小成本值 1.2 问题解决方案 第一种方案:使用Prim算法 首先以一个结点作为最小生成树的初始结点,然后以迭代的方式找出与最小生成树中各结点权重最小边,并加入到最小生成树中。加入之后如果产生回路则跳过这条边,选择下一个结点。当所有结点都加入到最小生成树中之后,就找出了连通图中的最小生成树了。 第二种方案:使用kruskal算法 算法过程:1.将图各边按照权值进行排序2.将图遍历一次,找出权值最小的边,(条件:此次找出的边不能和已加入最小生成树集合的边构成环),若符合条件,则加入最小生成树的集合中。不符合条件则继续遍历图,寻找下一个最小权值的边。3.递归重复步骤1,直到找出n-1条边为止(设图有n个结点,则最小生成树的边数应为n-1条),算法结束。得到的就是此图的最小生成树。
动态规划习题讲解
第七章动态规划 规划问题的最终目的就是确定各决策变量的取值,以使目标函数达到极大或极小。在线性规划和非线性规划中,决策变量都是以集合的形式被一次性处理的;然而,有时我们也会面对决策变量需分期、分批处理的多阶段决策问题。所谓多阶段决策问题是指这样一类活动过程:它可以分解为若干个互相联系的阶段,在每一阶段分别对应着一组可供选取的决策集合;即构成过程的每个阶段都需要进行一次决策的决策问题。将各个阶段的决策综合起来构成一个决策序列,称为一个策略。显然,由于各个阶段选取的决策不同,对应整个过程可以有一系列不同的策略。当过程采取某个具体策略时,相应可以得到一个确定的效果,采取不同的策略,就会得到不同的效果。多阶段的决策问题,就是要在所有可能采取的策略中选取一个最优的策略,以便得到最佳的效果。动态规划(dynamic programming)同前面介绍过的各种优化方法不同,它不是一种算法,而是考察问题的一种途径。动态规划是一种求解多阶段决策问题的系统技术,可以说它横跨整个规划领域(线性规划和非线性规划)。当然,由于动态规划不是一种特定的算法,因而它不象线性规划那样有一个标准的数学表达式和明确定义的一组规则,动态规划必须对具体问题进行具体的分析处理。在多阶段决策问题中,有些问题对阶段的划分具有明显的时序性,动态规划的“动态”二字也由此而得名。动态规划的主要创始人是美国数学家贝尔曼(Bellman)。20世纪40年代末50年代初,当时在兰德公司(Rand Corporation)从事研究工作的贝尔曼首先提出了动态规划的概念。1957年贝尔曼发表了数篇研究论文,并出版了他的第一部著作《动态规划》。该著作成为了当时唯一的进一步研究和应用动态规划的理论源泉。1961年贝尔曼出版了他的第二部著作,并于1962年同杜瑞佛思(Dreyfus)合作出版了第三部著作。在贝尔曼及其助手们致力于发展和推广这一技术的同时,其他一些学者也对动态规划的发展做出了重大的贡献,其中最值得一提的是爱尔思(Aris)和梅特顿(Mitten)。爱尔思先后于1961年和1964年出版了两部关于动态规划的著作,并于1964年同尼母霍思尔(Nemhauser)、威尔德(Wild)一道创建了处理分枝、循环性多阶段决策系统的一般性理论。梅特顿提出了许多对动态规划后来发展有着重要意义的基础性观点,并且对明晰动态规划路径的数学性质做出了巨大的贡献。 动态规划在工程技术、经济管理等社会各个领域都有着广泛的应用,并且获得了显著的效果。在经济管理方面,动态规划可以用来解决最优路径问题、资源分配问题、生产调度问题、库存管理问题、排序问题、设备更新问题以及生产过程最优控制问题等,是经济管理中一种重要的决策技术。许多规划问题用动态规划的方法来处理,常比线性规划或非线性规划更有效。特别是对于离散的问题,由于解析数学无法发挥作用,动态规划便成为了一种非常有用的工具。 动态规划可以按照决策过程的演变是否确定分为确定性动态规划和随机性动态规划;也可以按照决策变量的取值是否连续分为连续性动态规划和离散性动态规划。本教材主要介绍动态规划的基本概念、理论和方法,并通过典型的案例说明这些理论和方法的应用。 §7.1 动态规划的基本理论 1.1多阶段决策过程的数学描述 有这样一类活动过程,其整个过程可分为若干相互联系的阶段,每一阶段都要作出相应的决策,以使整个过程达到最佳的活动效果。任何一个阶段(stage,即决策点)都是由输入(input)、决策(decision)、状态转移律(transformation function)和输出(output)构成的,如图7-1(a)所示。其中输入和输出也称为状态(state),输入称为输入状态,输出称为输出状态。
图论及其应用 答案电子科大
习题三: ● 证明:是连通图G 的割边当且仅当V(G)可划分为两个子集V1和V2,使对任意及, G 中的路必含. 证明:充分性: 是的割边,故至少含有两个连通分支,设是其中一个连通分支的顶点集,是其余分支的顶点集,对12,u V v V ?∈?∈,因为中的不连通,而在中与连通,所以在每一条路上,中的必含。 必要性:取12,u V v V ∈∈,由假设中所有路均含有边,从而在中不存在从与到的路,这表明不连通,所以e 是割边。 ● 3.设G 是阶大于2的连通图,证明下列命题等价: (1) G 是块 (2) G 无环且任意一个点和任意一条边都位于同一个圈上; (3) G 无环且任意三个不同点都位于同一条路上。 : 是块,任取的一点,一边,在边插入一点,使得成为两条边,由此得到新图,显然的是阶数大于3的块,由定理,中的u,v 位于同一个圈上,于是 中u 与边都位于同一个 圈上。 : 无环,且任意一点和任意一条边都位于同一个圈上,任取的点u ,边e ,若在上,则三个不同点位于同一个闭路,即位于同一条路,如不在上,由定理,的两点在同一个闭路上,在边插入一个点v ,由此得到新图,显然的是阶数大于3的块,则两条边的三个不同点在同一条路上。 : 连通,若不是块,则中存在着割点,划分为不同的子集块,,,无环,12,x v y v ∈∈,点在每一条的路上,则与已知矛盾,是块。 ● 7.证明:若v 是简单图G 的一个割点,则v 不是补图的割点。 证明:是单图的割点,则有两个连通分支。现任取, 如果不在的
同一分支中,令是与 处于不同分支的点,那么,与在的补图中连通。若在的同一分支中,则它们在的补图中邻接。所以,若是的割点,则不是补图的割点。 ● 12.对图3——20给出的图G1和G2,求其连通度和边连通度,给 出相应的最小点割和最小边割。 解:()12G κ= 最小点割 {6,8} 1()2G λ= 最小边割{(6,5),(8,5)} ()25G κ= 最小点割{6,7,8,9,10} 2()5G λ= 最小边割{(2,7)…(1,6)} ● 13.设H 是连通图G 的子图,举例说明:有可能k(H)> k(G). 解: 通常. 整个图为,割点左边的图为的的子图, ,则. e H
算法合集之《生成树的计数及其应用》
生成树的计数及其应用 安徽周冬目录 生成树的计数及其应用 (1) 目录 (1) 摘要 (2) 关键字 (2) 问题的提出 (2) [例一]高速公路(SPOJ p104 Highways) (2) [分析] (2) 预备知识 (2) 排列 (3) 行列式 (4) 新的方法 (7) 介绍 (7) 证明 (9) 理解 (12) 具体应用 (12) [例二]员工组织(UVA p10766 Organising the Organisation) (13) [分析] (13) [例三]国王的烦恼(原创) (13) [分析] (14) 总结 (14) 参考文献 (14)
摘要 在信息学竞赛中,有关生成树的最优化问题如最小生成树等是我们经常遇到的,而对生成树的计数及其相关问题则少有涉及。事实上,生成树的计数是十分有意义的,在许多方面都有着广泛的应用。本文从一道信息学竞赛中出现的例题谈起,首先介绍了一种指数级的动态规划算法,然后介绍了行列式的基本概念、性质,并在此基础上引入Matrix-Tree定理,同时通过与一道数学问题的对比,揭示了该定理所包含的数学思想。最后通过几道例题介绍了生成树的计数在信息学竞赛中的应用,并进行总结。 关键字 生成树的计数Matrix-Tree定理 问题的提出 [例一]高速公路(SPOJ p104 Highways) 一个有n座城市的组成国家,城市1至n编号,其中一些城市之间可以修建高速公路。现在,需要有选择的修建一些高速公路,从而组成一个交通网络。你的任务是计算有多少种方案,使得任意两座城市之间恰好只有一条路径? 数据规模:1≤n≤12。 [分析] 我们可以将问题转化到成图论模型。因为任意两点之间恰好只有一条路径,所以我们知道最后得到的是原图的一颗生成树。因此,我们的问题就变成了,给定一个无向图G,求它生成树的个数t(G)。这应该怎么做呢? 经过分析,我们可以得到一个时间复杂度为O(3n*n2)的动态规划算法,因为原题的规模较小,可以满足要求。但是,当n再大一些就不行了,有没有更优秀的算法呢?答案是肯定的。在介绍算法之前,首先让我们来学习一些基本的预备知识。 预备知识 下面,我们介绍一种重要的代数工具——行列式。为了定义行列式,我们首先来看一下排列的概念。
动态规划算法原理与的应用
动态规划算法原理 及其应用研究 2012年5月20日摘要:动态规划是解决最优化问题的基本方法,本文介绍了
动态规划的基本思想和基本步骤,并通过几个实例的分析,研究了利用动态规划设计算法的具体途径。关键词:动态规划多阶段决策 1.引言 规划问题的最终目的就是确定各决策变量的取值,以使目标函数达到极大或极小。在线性规划和非线性规划中,决策变量都是以集合的形式被一次性处理的;然而,有时我们也会面对决策变量需分期、分批处理的多阶段决策问题。所谓多阶段决策问题是指这样一类活动过程:它可以分解为若干个互相联系的阶段,在每一阶段分别对应着一组可供选取的决策集合;即构成过程的每个阶段都需要进行一次决策的决策问题。将各个阶段的决策综合起来构成一个决策序列,称为一■ 个策略。显然,由于各个阶段选取的决策不同,对应整个过程可以有一系列不同的策略。当过程采取某个具体策略时,相应可以得到一个确定的效果,采取不同的策略,就会得到不同的效果。多阶段的决策问题,就是要在所有可能采取的策略中选取一个最优的策略,以便得到最佳的效果。动态规划是一种求解多阶段决策问题的系统技术,可以说它横跨整个规划领域(线性规划和非线性规划)。在多阶段决策问题中,有些问题对阶段的划分具有明显的时序性,动态规划的“动态”二字也由此而得名。动态规划的主要创始人是美国数学家贝尔曼(Bellman)。20世纪40年代末50年代初,当时在兰德公司(Rand Corporation)从事研究工作的贝尔曼首先提出了动态规划的概念。1957年贝尔曼发表了数篇研究论文,并出版了他的第一部著作《动态规划》。该著作成为了当时唯一的进一步研究和应用动态规划的理论源泉。在贝尔曼及其助手们致力于发展和推广这一技术的同时,其他一些学者也对动态规划的发展做出了重大的贡献,其中最值得一提的是爱尔思(Aris)和梅特顿(Mitten )。爱尔思先后于1961年和1964年出版了两部 关于动态规划的著作,并于1964年同尼母霍思尔(Nemhause)、威尔德(Wild)一道创建了处理分枝、循环性多阶段决策系统的一般性理论。梅特顿提出了许多对动态规划后来发展有着重要意义的基础性观点,并且对明晰动态规划路径的数学性质做出了巨大的贡献。 动态规划问世以来,在工程技术、经济管理等社会各个领域都有着广泛的应用,并且获得了显著的效果。在经济管理方面,动态规划可以用来解决最优路径