控 制 网 平 差 报 告
控制网平差报告
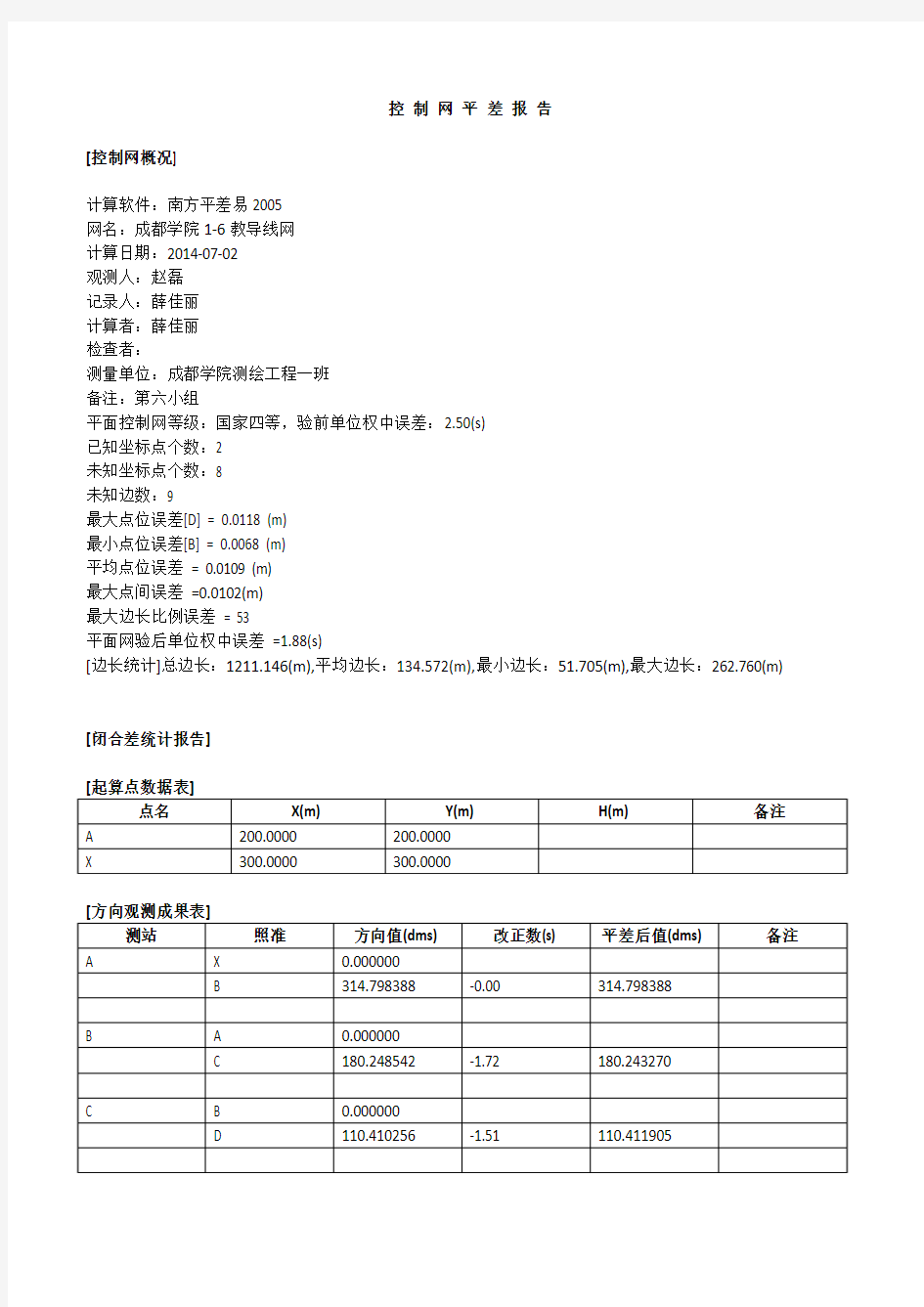
[控制网概况]
计算软件:南方平差易2005
网名:成都学院1-6教导线网
计算日期:2014-07-02
观测人:赵磊
记录人:薛佳丽
计算者:薛佳丽
检查者:
测量单位:成都学院测绘工程一班
备注:第六小组
平面控制网等级:国家四等,验前单位权中误差:2.50(s)
已知坐标点个数:2
未知坐标点个数:8
未知边数:9
最大点位误差[D] = 0.0118 (m)
最小点位误差[B] = 0.0068 (m)
平均点位误差= 0.0109 (m)
最大点间误差=0.0102(m)
最大边长比例误差= 53
平面网验后单位权中误差=1.88(s)
[边长统计]总边长:1211.146(m),平均边长:134.572(m),最小边长:51.705(m),最大边长:262.760(m) [闭合差统计报告]
高程网平差
--------------------------------------------------------------------
APPROXIMATE HEIGHT
--------------------------------------------------------------------
No. Name Height(m)
--------------------------------------------------------------------
1 A1 500.0000
2 A2 499.6860
3 A3 499.3690
4 A4 499.2295
5 B1 497.9570
6 B2 497.1505
7 C1 495.7295
8 C2 495.0625
9 D1 495.5515
10 D2 494.9110
11 E1 494.5825
12 E2 494.8445
13 F1 495.6000
14 F2 496.6285
15 F3 497.4515
16 F4 497.6475
17 G1 497.8745
18 G2 498.7295
19 G3 499.3575
20 G4 500.2470
21 H1 500.2645
22 H2 500.3755
23 I1 500.9020
24 I2 500.4175
--------------------------------------------------------------------
KNOWN HEIGHT
--------------------------------------------------------------------
No. Name Height(m)
--------------------------------------------------------------------
1 A1 500.00000
--------------------------------------------------------------------
MEASURING DATA OF HEIGHT DIFFERENCE
--------------------------------------------------------------------
No. From To Observe(m) Distance(km) Weight --------------------------------------------------------------------
1 A
2 A1 0.31400 0.0602 16.611
2 A
3 A2 0.31700 0.0601 16.639
3 A
4 A3 0.13950 0.0602 16.611
4 B1 A4 1.27250 0.0831 12.034
5 B2 B1 0.80650 0.0700 14.286
6 C1 B2 1.42100 0.0703 14.225
7 C2 C1 0.66700 0.0430 23.256
8 D1 C2 -0.48900 0.0410 24.390
9 D2 D1 0.64050 0.0533 18.762
10 E1 D2 0.32850 0.0260 38.462
11 E2 E1 -0.26200 0.0452 22.124
12 F1 E2 -0.75550 0.0601 16.639
13 F2 F1 -1.02850 0.0122 81.967
14 F3 F2 -0.82300 0.0130 76.923
15 F4 F3 -0.19600 0.0451 22.173
16 G1 F4 -0.22700 0.0525 19.048
17 G2 G1 -0.85500 0.0099 101.010
18 G3 G2 -0.62800 0.0501 19.960
19 G4 G3 -0.88950 0.0501 19.960
20 H1 G4 -0.01750 0.0874 11.442
21 H2 H1 -0.11100 0.0201 49.751
22 I1 H2 -0.52650 0.0401 24.938
23 I2 I1 0.48450 0.0805 12.422
24 A1 I2 0.42150 0.0840 11.905 --------------------------------------------------------------------
ADJUSTED HEIGHT
--------------------------------------------------------------------
No. Name Height(m) Mh(mm)
--------------------------------------------------------------------
1 A1 500.0000
2 A2 499.6862 0.87
3 A3 499.369
4 1.19
4 A4 499.2301 1.42
5 B1 497.9579 1.65
6 B2 497.1516 1.78
7 C1 495.7308 1.88
8 C2 495.0640 1.93
9 D1 495.5531 1.96
10 D2 494.9128 1.99
11 E1 494.5844 2.00
12 E2 494.8465 2.00
13 F1 495.6022 1.99
14 F2 496.6307 1.98
15 F3 497.4538 1.98
16 F4 497.6499 1.95
17 G1 497.8771 1.90
18 G2 498.7321 1.89
19 G3 499.3603 1.83
20 G4 500.2500 1.75
21 H1 500.2678 1.55
22 H2 500.3788 1.50
23 I1 500.9055 1.37
24 I2 500.4212 1.01
--------------------------------------------------------------------
ADJUSTED HEIGHT DIFFERENCE
--------------------------------------------------------------------
No. From To Adjusted_dh(m) V(mm) Mdh(mm)
--------------------------------------------------------------------
1 A
2 A1 0.3138 -0.20 0.87
2 A
3 A2 0.3168 -0.20 0.87
3 A
4 A3 0.1393 -0.20 0.87
4 B1 A4 1.2722 -0.27 1.01
5 B2 B1 0.8063 -0.23 0.93
6 C1 B2 1.4208 -0.23 0.93
7 C2 C1 0.6669 -0.14 0.74
8 D1 C2 -0.4891 -0.13 0.72
9 D2 D1 0.6403 -0.18 0.82
10 E1 D2 0.3284 -0.09 0.58
11 E2 E1 -0.2621 -0.15 0.76
12 F1 E2 -0.7557 -0.20 0.87
13 F2 F1 -1.0285 -0.04 0.40
14 F3 F2 -0.8230 -0.04 0.41
15 F4 F3 -0.1961 -0.15 0.76
16 G1 F4 -0.2272 -0.17 0.81
17 G2 G1 -0.8550 -0.03 0.36
18 G3 G2 -0.6282 -0.16 0.79
19 G4 G3 -0.8897 -0.16 0.79
20 H1 G4 -0.0178 -0.29 1.03
21 H2 H1 -0.1111 -0.07 0.51
22 I1 H2 -0.5266 -0.13 0.71
23 I2 I1 0.4842 -0.26 0.99
24 A1 I2 0.4212 -0.28 1.01
--------------------------------------------------------------------
UNIT WEIGHT AND PVV
--------------------------------------------------------------------
PVV= 13.142
Free Degree= 1
Unit Weight= 3.625
[s]= 1.217(km)
Total Point Number= 24
Height Difference Number= 24
--------------------------------------------------------------------
高差闭合差计算结果
闭合环号:1
线路点号: I2 I1 H2 H1 G4
G3 G2 G1 F4 F3
F2 F1 E2 E1 D2
D1 C2 C1 B2 B1
A4 A3 A2 A1
高差闭合差: 4.00(MM)
总长度: 1.2175(KM)
平原限差: 22.07(MM)
由闭合差计算的观测值精度
每公里高程测量的高差中误差: 3.63 (MM/KM)
多边形个数: 1
高程控制网平差成果表
━━━━━━━━━━网名:
等级:
测量单位:
测量时间:
测量人员:
仪器:
平差参考系:
平差类型:
高差观测值总数:24
多余观测数(自由度):1
先验每公里高程测量高差中误差:
后验每公里高程测量高差中误差:3.625
高差观测值平差成果表
--------------------
┏━━━━┯━━━━┯━━━━━━━┯━━━━┯━━━━━━━┯━━━━┯━━━━━┓
┃起点│终点│观测高差│改正数│平差值│精度│距离┃
┃────┼────┼───────┼────┼───────┼────┼─────┨
┃N1 │N2 │Dh(米) │Vh(毫米)│DH^(米) │Mh(毫米)│S(公里) ┃
┣━━━━┿━━━━┿━━━━━━━┿━━━━┿━━━━━━━┿━━━━┿━━━━━┫
┃A2 │A1 │0.3140 │-0.20 │0.3138 │0.87 │0.060 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃A3 │A2 │0.3170 │-0.20 │0.3168 │0.87 │0.060 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃A4 │A3 │0.1395 │-0.20 │0.1393 │0.87 │0.060 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃B1 │A4 │ 1.2725 │-0.27 │ 1.2722 │ 1.01 │0.083 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃B2 │B1 │0.8065 │-0.23 │0.8063 │0.93 │0.070 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃C1 │B2 │ 1.4210 │-0.23 │ 1.4208 │0.93 │0.070 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃C2 │C1 │0.6670 │-0.14 │0.6669 │0.74 │0.043 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃D1 │C2 │-0.4890 │-0.13 │-0.4891 │0.72 │0.041
┃
┠────┼────┼───────┼────┼───────┼────┼───
┃D2 │D1 │0.6405 │-0.18 │0.6403 │0.82 │0.053 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃E1 │D2 │0.3285 │-0.09 │0.3284 │0.58 │0.026 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃E2 │E1 │-0.2620 │-0.15 │-0.2621 │0.76 │0.045 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃F1 │E2 │-0.7555 │-0.20 │-0.7557 │0.87 │0.060 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃F2 │F1 │-1.0285 │-0.04 │-1.0285 │0.40 │0.012 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃F3 │F2 │-0.8230 │-0.04 │-0.8230 │0.41 │0.013 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃F4 │F3 │-0.1960 │-0.15 │-0.1961 │0.76 │0.045 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃G1 │F4 │-0.2270 │-0.17 │-0.2272 │0.81 │0.052 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃G2 │G1 │-0.8550 │-0.03 │-0.8550 │0.36 │0.010 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃G3 │G2 │-0.6280 │-0.16 │-0.6282 │0.79 │0.050 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃G4 │G3 │-0.8895 │-0.16 │-0.8897 │0.79 │0.050 ┃
┠────┼────┼───────┼────┼───────┼────┼───
┃H1 │G4 │-0.0175 │-0.29 │-0.0178 │ 1.03 │0.087 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃H2 │H1 │-0.1110 │-0.07 │-0.1111 │0.51 │0.020 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃I1 │H2 │-0.5265 │-0.13 │-0.5266 │0.71 │0.040 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃I2 │I1 │0.4845 │-0.26 │0.4842 │0.99 │0.081 ┃
┠────┼────┼───────┼────┼───────┼────┼─────┨
┃A1 │I2 │0.4215 │-0.28 │0.4212 │ 1.01 │0.084 ┃
┗━━━━┷━━━━┷━━━━━━━┷━━━━┷━━━━━━━┷━━━━┷━━━━━┛
高程平差值和精度成果表
----------------------
┏━━━━━━━━━┯━━━━┯━━━━━━━┯━━━━━┯━━━━━━━━━┓┃点名│点号│高程(米) │精度(毫米)│备注┃┣━━━━━━━━━┿━━━━┿━━━━━━━┿━━━━━┿━━━━━━━━━┫┃A1 │A1 │500.0000 │0.00 │┃┠─────────┼────┼───────┼─────┼─────────┨┃A2 │A2 │499.6862 │0.87 │┃┠─────────┼────┼───────┼─────┼─────────┨┃A3 │A3 │499.3694 │ 1.19 │┃┠─────────┼────┼───────┼─────┼─────────┨┃A4 │A4 │499.2301 │ 1.42 │┃┠─────────┼────┼───────┼─────┼─────────┨┃B1 │B1 │497.9579 │ 1.65 │┃┠─────────┼────┼───────┼─────┼─────────┨┃B2 │B2 │497.1516 │ 1.78 │┃┠─────────┼────┼───────┼─────┼─────────┨┃C1 │C1 │495.7308 │ 1.88 │┃┠─────────┼────┼───────┼─────┼─────────┨┃C2 │C2 │495.0640 │ 1.93 │┃┠─────────┼────┼───────┼─────┼─────────┨┃D1 │D1 │495.5531 │ 1.96 │┃┠─────────┼────┼───────┼─────┼─────────┨┃D2 │D2 │494.9128 │ 1.99 │┃┠─────────┼────┼───────┼─────┼─────────┨┃E1 │E1 │494.5844 │ 2.00 │┃┠─────────┼────┼───────┼─────┼─────────┨┃E2 │E2 │494.8465 │ 2.00 │┃┠─────────┼────┼───────┼─────┼─────────┨┃F1 │F1 │495.6022 │ 1.99 │┃┠─────────┼────┼───────┼─────┼─────────┨┃F2 │F2 │496.6307 │ 1.98 │┃┠─────────┼────┼───────┼─────┼─────────┨┃F3 │F3 │497.4538 │ 1.98 │┃┠─────────┼────┼───────┼─────┼─────────┨┃F4 │F4 │497.6499 │ 1.95 │┃┠─────────┼────┼───────┼─────┼─────────┨┃G1 │G1 │497.8771 │ 1.90 │┃┠─────────┼────┼───────┼─────┼─────────┨┃G2 │G2 │498.7321 │ 1.89 │┃┠─────────┼────┼───────┼─────┼─────────┨┃G3 │G3 │499.3603 │ 1.83 │┃┠─────────┼────┼───────┼─────┼─────────┨
┃G4 │G4 │500.2500 │ 1.75 │┃┠─────────┼────┼───────┼─────┼─────────┨┃H1 │H1 │500.2678 │ 1.55 │┃┠─────────┼────┼───────┼─────┼─────────┨┃H2 │H2 │500.3788 │ 1.50 │┃┠─────────┼────┼───────┼─────┼─────────┨┃I1 │I1 │500.9055 │ 1.37 │┃┠─────────┼────┼───────┼─────┼─────────┨┃I2 │I2 │500.4212 │ 1.01 │┃┗━━━━━━━━━┷━━━━┷━━━━━━━┷━━━━━┷━━━━━━━━━┛
控 制 网 平 差 报 告
控制网平差报告 [控制网概况] 计算软件:南方平差易2005 网名:成都学院1-6教导线网 计算日期:2014-07-02 观测人:赵磊 记录人:薛佳丽 计算者:薛佳丽 检查者: 测量单位:成都学院测绘工程一班 备注:第六小组 平面控制网等级:国家四等,验前单位权中误差:2.50(s) 已知坐标点个数:2 未知坐标点个数:8 未知边数:9 最大点位误差[D] = 0.0118 (m) 最小点位误差[B] = 0.0068 (m) 平均点位误差= 0.0109 (m) 最大点间误差=0.0102(m) 最大边长比例误差= 53 平面网验后单位权中误差=1.88(s) [边长统计]总边长:1211.146(m),平均边长:134.572(m),最小边长:51.705(m),最大边长:262.760(m) [闭合差统计报告]
高程网平差 -------------------------------------------------------------------- APPROXIMATE HEIGHT -------------------------------------------------------------------- No. Name Height(m) -------------------------------------------------------------------- 1 A1 500.0000 2 A2 499.6860 3 A3 499.3690 4 A4 499.2295 5 B1 497.9570 6 B2 497.1505 7 C1 495.7295 8 C2 495.0625 9 D1 495.5515 10 D2 494.9110 11 E1 494.5825
GPS静态控制测量网平差报告
FJ-3 省道S229南坑至源头段 二级公路改建工程 GPS静态控制测量网平差报告 萍乡公路勘察设计院 二○一一年九月 目录 一、GPS控制点成果表 (1) 二、GPS控制点网示意图 (1) 三、GPS控制网平差报告……………………………………1~4
一、G PS控制点成果表 二、GPS控制点网示意图 三、GPS控制网平差报告 1 坐标系统 1.1 坐标系统名称 Beijing54 1.2 基准参数
1.3 投影参数 M0 =1.00000000 投影比率 H = 0.0000 投影高 Bm =0投影面的平均纬度 B0 =0:00:00.00N 原点纬度 L0 =113:50:00.00E 中央子午线 N0 =0.0000 北向加常数 E0 =500000.0000 东向加常数 回到顶部 2 三维无约束平差2.1 平差参数 2.2 基线向量及改正数 2.3 τ(Tau)检验表 2.4 τ(Tau)检验直方图
2.5 自由网平差坐标 回到顶部 3 二维约束平差 3.1 平差参数 3.2 平面距离平差值 3.3 平面坐标 ***** 回到顶部
4 高程拟合 4.1 平差参数 4.2 高程拟合坐标 240.7246 回到顶部 5 基线闭合差 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G2->G3.242A 99.9 0.0062 -2063.4456 -1777.5444 1294.6074 3015.5398 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.76ppm EX = 0.0043 EY = -0.0043 EZ = -0.0026 8706.0493 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->G4.242B 99.9 0.0072 -4060.9524 -3093.9755 2049.7944 5501.4248 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.48ppm EX = -0.0041 EY = 0.0051 EZ = 0.0010 13683.0814 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->GD1.242X 99.9 0.0065 1554.7134 -896.8104 2732.5118 3269.2543 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.80ppm EX = -0.0048 EY = 0.0042 EZ = 0.0017 8261.4927 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->G4.242B 99.9 0.0063 -1997.5067 -1316.4322 755.1870 2508.6519 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.12ppm EX = -0.0003 EY = 0.0004 EZ = 0.0015 13695.9047 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->GD1.242X 99.9 0.0071 3618.1569 880.7382 1437.9069 3991.7835 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.42ppm EX = 0.0026 EY = -0.0040 EZ = -0.0015 11989.6182 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G4->GD1.242X 99.9 0.0073 5615.6650 2197.1667 682.7190 6068.7182 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.16ppm EX = 0.0015 EY = -0.0007 EZ = -0.0022 16557.6999
控制测量学边角网坐标平差算例
边角网坐标平差算例 例9 今有一边角网如图9-11所示。网中A 、B 、C 、D 、E 是已知点,起算数据见(表9-12),1P 、2P 是待定点。同精度观测了九个角度921,,,L L L (见表9-13),测角中误差为5.2''±;测量了五个边长141110,,,L L L ,其观测结果及中误差见表9-13。试 定点13 013.493301=x m 702.651301=y m 283.468402 =x m 948.799202=y m
2、由已知点坐标和待定点近似坐标计算待定边的坐标方位角改正数方程系数(见表9-14的6~9列);计算待定边的边长改正数方程的系数(见表9-14的10~13列)。 需要指出,坐标方位角改正数方程的系数的单位是秒/厘米,而边长改正数的系数无单位。 3、计算观测角误差方程的系数和常数项,其结果见表9-15的1~9行。写出观测边误差方程的系数和常数项,其结果见表9-15的第10~14行。表中,每一行表示一个误差方程;s 为每个误差方程的和检核数。设取±2.5″为单位权中误差,则测角的权为 2 2)(i i m P ββμ= 令 2 2 i m βμ=,则1)5.2()5.2(2 2 22== =i i i m m P ββ β(无单位) 观测边的权为 222 2) (i i Li m m m P i β μ= = (秒2/cm 2)
表9-14 表9-15 3
表9-16 4
各观测值的权写在表9-15的p 列中。v 为角度及边长的改正数,是在解出坐标改正数后计算的。 表9-15中,角度误差方程常数项的单位为秒,边误差方程常数项的单位为cm ,按误差方程求得观测角和观测边的改正数的单位也分别为秒和cm 。 4、法方程的组成和解算。由表9-15取得误差方程的系数、常数项、和检核数和权组成法方程的系数、常数项、检核数,其结果和法方程的解算均见表9-16。 将解出的未知数代入法方程校核,均正确无误。计算PV V T ,得 34.289=T PV V 将解出的未知数代入误差方程,计算观测值的改正数,结果写在表9-15的v 列。 5、平差值计算 (1) 坐标平差值 038.4333025.0013.493310 1 1=+=+=x x x δm 767.6513065.0702.651310 1 1=+=+=y y y δm 394.4684111.0283.468420 2 2=+=+=x x x δm 960.7992012.0948.799220 2 2=+=+=y y y δm (2) 观测值的平差值 将表9-15中的改正数与表9-8-2中的观测值相加,即得观测值的平差值,记于表9-16中。 经检核,以上平差值间消除了不符值。检核是这样进行的:由点B 、A 和角2 ?L 、1?L 计算1P 点的坐标;由点C 、B 和角5 ?L 、4 ?L 计算1P 点坐标;由点1P 和5 ?L 、7 ?L 、13 ?L 计算2 P 点坐标;由点2P 和5?L 、7 ?L 、8?L 、14?L 计算D 点坐标。计算结果都和上面求得的或给定的坐标一致,此处不再列出。 (3) 待定边的坐标方位角和边长(检核)平差值。由待定点的坐标平差值和已知点的坐标计算待定边的坐标方位角和边长平差值,结果写在表9-18中。
GPS控制网平差总结报告.doc
西南林业大学 《全球卫星定位系统原理》GPS控制网平差实习 (2012级) 题目静态GPS控制网平差总结报告 学院土木工程学院 专业测绘工程 学号20120456023 学生姓名施向文 任课教师朱毅 西南林业大学土木工程学院测绘工程系 2015年07月 12 日
目录 1 实习目的 0 2 实习任务 0 3 数据处理依据 0 4 精度要求 0 5 已有成果数据 0 6 数据处理过程 (1) 6.1创建作业及数据导入 (1) 6.2基线预处理 (1) 6.2.1静态基线处理设置 (1) 6.2.2处理基线 (2) 6.2.3搜索闭合环 (2) 6.3设置坐标系 (2) 6.4网平差 (2) 6.5高程内外符合精度检验 (3) 6.5.1内符合精度 (3) 6.5.2外符合精度 (3) 7 数据处理成果 (3) 7.1二维平面坐标平差 (3) 7.1.1 平差参数 (3) 7.1.2 平面坐标 (4) 7.2高程拟合 (7) 7.2.1 平差参数 (7) 7.2.2 外符合精度 (7) 7.2.3内符合精度 (9) 8 质量简评 (11) 9 总结 (12)
静态GPS网平差总结报告 1 实习目的 通过对静态GPS控制网的数据处理,从实践中加深对理论知识的理解。通过本次实习还可以熟悉GPS数据处理软件,现在的数据处理基本用软件处理,使用软件也是必备的一个技能。 2 实习任务 本次实习的任务: (1)静态GPS外业数据基线预处理,预处理基线的方差比应尽量调整在99.9,处理后搜索闭合环要基本合格。 (2)选择/建立坐标系,建立昆明87坐标系。 (3)输入已知点并进行网平差,检测内外符合精度。 (4)撰写数据处理总结报告。 3 数据处理依据 依据《卫星定位城市测量技术规范CJJ/T 73—2010》备案号J990—2010 4 精度要求 二维平差中误差1cm 高程拟合中误差2cm 高程内符合中误差3cm 高程外符合中误差5cm 5 已有成果数据 (1)静态GPS外业数据成果(RINEX) (2)已知点的三维坐标,坐标成果见下表
边角三角网平差程序的设计书
边角三角网平差程序设计书 一、课程设计的目的 学生在学习完误差理论与测量平差基础、测量平差程序设计基础等课程的基础上,设计一个完整的测量数据处理程序,培养学生综合应用量数据处理与计算机应用能力,培养学生主动学习,创新设计能力。 二、课程设计的任务和内容 1.课程设计任务: 在两周的时间内应用者Matlab程序设计语言编制一个完整的边角网严密平差程序,要求有简易的界面,数据输入采用文本输入,采用间接平差模型完成平差的基本计算,能够画出控制网图,输出基本的计算结果,并根据设计过程完成设计报告。 程序设计主要内容包括: 系统功能设计 界面设计 流程设计 代码书写 程序调试 三、课程设计阶段 准备阶段 研究设计任务书,分析设计题目,熟悉原始数据,明确设计内容和要求;制定课程设计计划和进度。 熟悉算法模型 阅读误差理论与测量平差基础教材,掌握平面控制网数据处理的数学模型,
这里主要是指方向观测量、角度观测量、边长观测量的观测方程和误差方程的构成,研究平面观测数据的组织方法,设计Matlab算法,实现计算的自动表达。 功能设计阶段设计程序要实现的功能 平差程序的基本功能包括数据的输入,平差计算,精度评定、成果输出等; 4.流程和界面设计阶段 根据平差计算的过程和程序功能,画出流程图,设计简易界面实现数据的输入和平差计算和成果输出。在此基础上,根据功能要求,设计简便的界面。 5.代码书写和调试阶段 按照计算流程图和界面设计,根据方向观测值,边长观测值的误差方程的组成,设计Matlab算法,实现误差方程的自动构成,分阶段书写代码,调试实现各个阶段的功能。 6.设计报告撰写阶段 设计报告是对整个设计过程进行综合总结提高,内容包括课设的目的意义、程序设计的内容、算法设计、设计心得等根据设计过程和对测量数据处理以及程序设计的理解进行独立撰写。 四、组织方式进度安排 以小组为单位,每小组5-6人,分工合作共同完成程序设计任务,时间两周, 进度安 排如下:
四等水准平差报告
-- NASEW V3.0 -- ** 控制网概况 ** 1. 本成果为按[ 高程 ]网处理的[ 平差 ]成果 数据库为: C:\NAS\0521.OBS 2. 控制网中: 直高间高 H点 待定 9 0 8 固定 0 0 2 特类 0 0 0 3. 平差前后基本观测量中误差情况: 观测值平差前平差后 直接高差: 0.006666 0.001344 4. 控制网中最大误差情况: 最大点位误差 = 0.00163米 最大点间误差 = 0.00174米 观测:何成斌记录:陆清普欧阳全 平差:何成斌检查:张德军 测量时间:2013年5月21日 [水准测量成果表] ======================================================================== 前视点后视点高差值改正数改正后值路线长备注 -----------+-----------+---------+---------+---------+---------+-------- 29III177 II52 -6.7960 -0.0006 -6.7966 1218 II52 II53 -0.4265 -0.0001 -0.4266 140 II53 T7 0.3515 -0.0001 0.3514 244 T7 T8 0.7785 -0.0000 0.7785 72
T8 T4 -9.0910 -0.0015 -9.0925 2962 T4 T3 0.4935 -0.0001 0.4934 100 T3 II10 0.2635 -0.0000 0.2635 96 II10 T1 -0.6825 -0.0001 -0.6826 112 T1 29III176 8.9125 -0.0009 8.9116 1838 [和]=0 段数=0 ======================================================================== [高差误差表] ================================================================ 点名点名高差中误差高差备注 -----------+-----------+---------+---------+-------------------- 29III177 II52 0.0013 -6.7966 II52 II53 0.0005 -0.4266 II53 T7 0.0007 0.3514 T7 T8 0.0004 0.7785 T8 T4 0.0017 -9.0925 T4 T3 0.0004 0.4934 T3 II10 0.0004 0.2635 II10 T1 0.0004 -0.6826 T1 29III176 0.0016 8.9116 ================================================================ [高程成果表] ======================================================================== 点名等级标石 H MH 备注 ---------+-----+-------+-----------+-----------+------------------------ 29III177 57.765 固定点 II52 50.968 0.001 II53 50.542 0.001 T7 50.893 0.001 T8 51.672 0.002 T4 42.579 0.002 T3 43.073 0.002
平差使用手册
辛酉平差软件用户手册二〇〇三年六月
目录 一、简介 1、功能与特色 2、开发与运行环境 3、界面介绍 4、操作提示 二、安装 1、硬件软件要求 2、典型安装 3、手工安装 三、平面控制网平差的相关知识与讨论 1、网形 2、起算数据 3、观测值类型与精度 4、必要观测与多余观测 5、平差模型 (1)、数学模型 (2)、条件模型 (3)、关于Qxx (4)、观测值、平差值精度 6、边角匹配 7、方差一致性检验 8、闭合差 第1页
(1)、类型 (2)、闭合差的限差 9、距离归算 10、近似坐标 四、网形数据 1、文件组成 2、测量精度 3、已知坐标 4、测站数据 (1)、观测值类型与约定 (2)、观测值精度 5、项目管理 五、预处理 1、距离归算 2、距离往返差检查 六、外业数据检核:闭合差 1、闭合差类型 独立闭合条件 2、用闭合差来检查与初步评定外业观测质量3、用闭合差限差来作隧道贯通误差预计 4、闭合差信息的编辑与输出方法 七、平差 1、选项 2、平差过程 3、平差结果的组成 第2页
(1)、平差信息 (2)、输出点位误差椭圆 (3)、输出观测值与平差结果 (4)、桩点表 (5)、网的综合信息 (6)、网的精度评定与方检验 (7)、权匹配结果 4、利用点位误差估算隧道贯通误差 5、利用距离误差估算桥轴线精度 八、报表 1、报表组成内容与类型 2、文本格式的报表 3、独立报表 4、MS Word2000报表 (1)、ActiveX技术 (2)调整表格 5、自定义距离方位表输出 6、网图 (1)、显示与拖拉 (2)、保存与数据交换 九、关于与注册 1、关于页 2、注册与功能限制 十、常见问题释疑 1、为何平差后已知方位或已知距离有“改动”? 第3页
边角网平差总结报告
总结报告 组名: 指导老师:
一、实习任务书 ................................................................................................................................................... - 2 - 二、小组总结报告 ................................................................................................................................................. - 5 - 2.1、实习目的、任务 ................................................................................................................................... - 5 - 2.2、实习组织 ............................................................................................................................................... - 5 - 2.3、功能设计 ............................................................................................................................................... - 6 - 2.4、流程设计 ............................................................................................................................................... - 6 - 2.4.1、数据组织输入和变量赋值 ....................................................................................................... - 6 - 2.4.2、待定点近似坐标的计算 ........................................................................................................... - 9 - 2.4.3、误差方程式组成 ..................................................................................................................... - 12 - 2.4.4、平差计算和精度评定 ............................................................................................................. - 14 - 2.4.5、误差椭圆参数计算 ................................................................................................................. - 17 - 2.4.6、控制网图形绘制和误差椭圆绘制.......................................................................................... - 18 - 2.4.7、平面控制网成果输出 ............................................................................................................. - 20 - 2.4.8、平差主界面的设计 ................................................................................................................. - 21 - 2.5、界面设计 ............................................................................................................................................. - 24 - 2.6、代码编写调试 ..................................................................................................................................... - 26 - 2.7、测试结果 ............................................................................................................................................. - 26 - 2.8、总结 ..................................................................................................................................................... - 27 - 三、个人总结报告 ............................................................................................................................................. - 28 - 3.1、个人总结报告-李强.doc ................................................................................................................... - 28 - 3.2、个人实习总结-杜顺利.doc ............................................................................................................... - 28 - 3.3、个人总结报告-陶盟.doc ................................................................................................................... - 28 - 3.4、个人总结报告-王文辉.doc ............................................................................................................... - 28 - 3.5、个人总结报告-郭翠林.doc ............................................................................................................... - 28 - 3.6、个人总结报告-钱世屹.doc ............................................................................................................... - 28 -
误差理论与测量平差课程设计报告
n 目录 一、目录 ----------------------------1 二、序言 ---------------------------- 2 三、设计思路------------------------ 3 四、程序流程图---------------------- 4 五、程序及说明---------------------- 5 六、计算结果-----------------------12 七、总结 --------------------------- 15 第二部分序言 1、课程设计的性质、目的和任务 误差理论与测量平差是一门理论与实践并重的课程,其课程设计是测量数据处理理论学习的一个重 要的实践环节,它是在我们学习了专业基础课“误差理论与测量平差基础”课程后进行的一门实践课程。其 目的是增强我们对误差理论与测量平差基础理论的理解,牢固掌握测量平差的基本原理和基本公式,熟悉测量数据处理的基本技能和计算方法,灵活准确地应用于解决各类数据处理的实际问题,并能用所学的计算机理论知识,编制简单的计算程序。 2、误差理论与测量平差课程和其它课程的联系和分工 这次课程设计中所用的数学模型和计算方法是我们在误差理论与测量平差课程中所学的内容,所使用的 C 程序语言使我们在计算机基础课程中所学知识。误差理论与测量平差课程设计是测量平差和计算机程 序设计等课程的综合实践与应用,同时也为我们今后步入工作岗位打下了一定基础。 3、课程设计重点及内容 本次课程设计重点是培养我们正确应用公式、综合分析和解决问题的能力,以及计算机编程能力。 另外它要求我们完成1-2 个综合性的结合生产实践的题目。如目前生产实践中经常用到的水准网严密平差 及精度评定,边角网(导线)严密平差及精度评定等。此次我所选的课程设计课题是水准网严密平差及精度 评定,其具体内容如下: 根据题目要求,正确应用平差模型列出观测值条件方程、误差方程和法方程;解算法方程,得出平差后 的平差值及各待定点的高程平差值;评定各平差值的精度和各高程平差值的精度。 具体算例为: 如图所示水准网,有 2 个已知点, 3 个未知点,(1)已知点高程H1=5.016m , H2=6.016m 7 个测段。各已知数据及观测值见下表( 2)高差观测值 (m)
GPS静态控制测量网平差报告
FJ -3 工程测量技术交流群18874248 省道S 229南坑至源头段 二级公路改建工程 GPS 静态控制测量 网平差报告 萍 乡 公 路 勘 察 设 计 院 二○一一年九月 目 录 一、 GPS 控制点成果表…………………………………………1 二、 GPS 控制点网示意图………………………………………1 三、 GPS 控制网平差报告……………………………………1~4
一、G PS控制点成果表 二、GPS控制点网示意图 三、GPS控制网平差报告 1 坐标系统 1.1 坐标系统名称 Beijing54 1.2 基准参数
1.3 投影参数 M0 =1.00000000 投影比率 H = 0.0000 投影高 Bm =0投影面的平均纬度 B0 =0:00:00.00N 原点纬度 L0 =113:50:00.00E 中央子午线 N0 =0.0000 北向加常数 E0 =500000.0000 东向加常数 回到顶部 2 三维无约束平差2.1 平差参数 2.2 基线向量及改正数 2.3 τ(Tau)检验表 2.4 τ(Tau)检验直方图
2.5 自由网平差坐标 回到顶部 3 二维约束平差 3.1 平差参数 3.2 平面距离平差值 3.3 平面坐标 ***** 回到顶部
4 高程拟合 4.1 平差参数 4.2 高程拟合坐标 240.7246 回到顶部 5 基线闭合差 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G2->G3.242A 99.9 0.0062 -2063.4456 -1777.5444 1294.6074 3015.5398 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.76ppm EX = 0.0043 EY = -0.0043 EZ = -0.0026 8706.0493 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->G4.242B 99.9 0.0072 -4060.9524 -3093.9755 2049.7944 5501.4248 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.48ppm EX = -0.0041 EY = 0.0051 EZ = 0.0010 13683.0814 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->GD1.242X 99.9 0.0065 1554.7134 -896.8104 2732.5118 3269.2543 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.80ppm EX = -0.0048 EY = 0.0042 EZ = 0.0017 8261.4927 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->G4.242B 99.9 0.0063 -1997.5067 -1316.4322 755.1870 2508.6519 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.12ppm EX = -0.0003 EY = 0.0004 EZ = 0.0015 13695.9047 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->GD1.242X 99.9 0.0071 3618.1569 880.7382 1437.9069 3991.7835 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.42ppm EX = 0.0026 EY = -0.0040 EZ = -0.0015 11989.6182 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G4->GD1.242X 99.9 0.0073 5615.6650 2197.1667 682.7190 6068.7182 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.16ppm EX = 0.0015 EY = -0.0007 EZ = -0.0022 16557.6999
控制网平差总报告
中南林业科技大学《误差理论与测量平差基 础》课程设计指导书 测绘工程二班许江 学号20144159 目录 一《误差理论与测量平差》课程设计说明与要求 二实验内容 实验一利用平差易软件和程序设计语言完成水准网平差 实验二利用平差易软件完成某工程控制网的平差计算 实验三利用平差易软件完成某工程导线网平差计算 实验四利用程序设计语言完成实验二某工程控制网或实验三某工程导线网平差计算
实验一利用平差易软件和程序设计语言完成水准网平差 一、实验目的 1.掌握水准平差的基本原理。 2.掌握程序语言设计的基础。 3. 掌握平差易软件的基本功能。 4. 能够独立完成水准网观测数据的平差处理过程 二、实验数据 如图1所示水准网,有1个已知点,4个未知点,8个测段。各已知数据及观测值见下表1,已知点高程H1=98m 。 图1 表1.高差观测值(m)
(3)求各待定点的高程;2号点、3号点、4号点的高程中误差。 三、控制网平差报告 [控制网概况] 1.本成果为按[平面]网处理的平差成果 计算软件:南方平差易2002 网名:xj 计算日期:2016/6/29 13:36 观测人:xujiang 记录人:xujaing 计算者:xujaing 测量单位:m 备注:20144159 高程控制网等级:等外水准 2.控制网中: 方向方位平距XY点 待定8 5 固定 每公里高差中误差= 20.11 (mm) [距离观测成果表] 测站照准距离(m) 改正数(m) 平差后值(m) 方位角(dms) 1 5 1380.0000 0.0000 1380.0000 360.000000 3 1420.0000 0.0000 1420.0000 360.000000 2 1810.0000 0.0000 1810.0000 360.000000 2 3 940.0000 0.0000 940.0000 360.000000 4 1760.0000 0.0000 1760.0000 360.000000 3 4 1400.0000 0.0000 1400.0000 360.000000 5 990.0000 0.0000 990.0000 360.000000 4 5 1350.0000 0.0000 1350.0000 360.000000