CFD网格及其生成方法概述
CFD网格及其生成方法概述
作者:王福军
网格是CFD模型的几何表达形式,也是模拟与分析的载体。网格质量对CFD计算精度和计算效率有重要影响。对于复杂的CFD问题,网格生成极为耗时,且极易出错,生成网格所需时间常常大于实际CFD计算的时间。因此,有必要对网格生成方式给以足够的关注。
1 网格类型
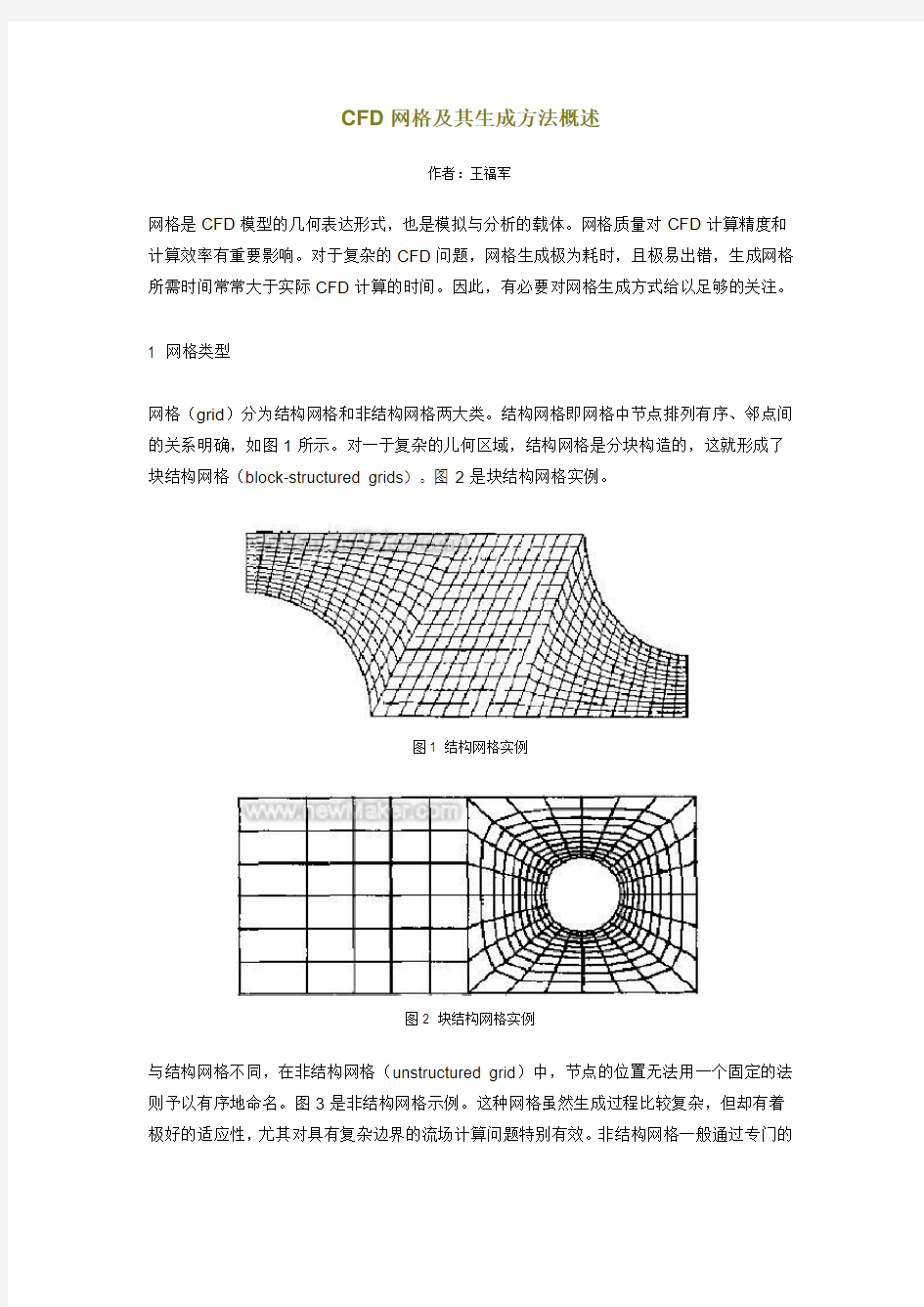
网格(grid)分为结构网格和非结构网格两大类。结构网格即网格中节点排列有序、邻点间的关系明确,如图1所示。对一于复杂的儿何区域,结构网格是分块构造的,这就形成了块结构网格(block-structured grids)。图2是块结构网格实例。
图1 结构网格实例
图2 块结构网格实例
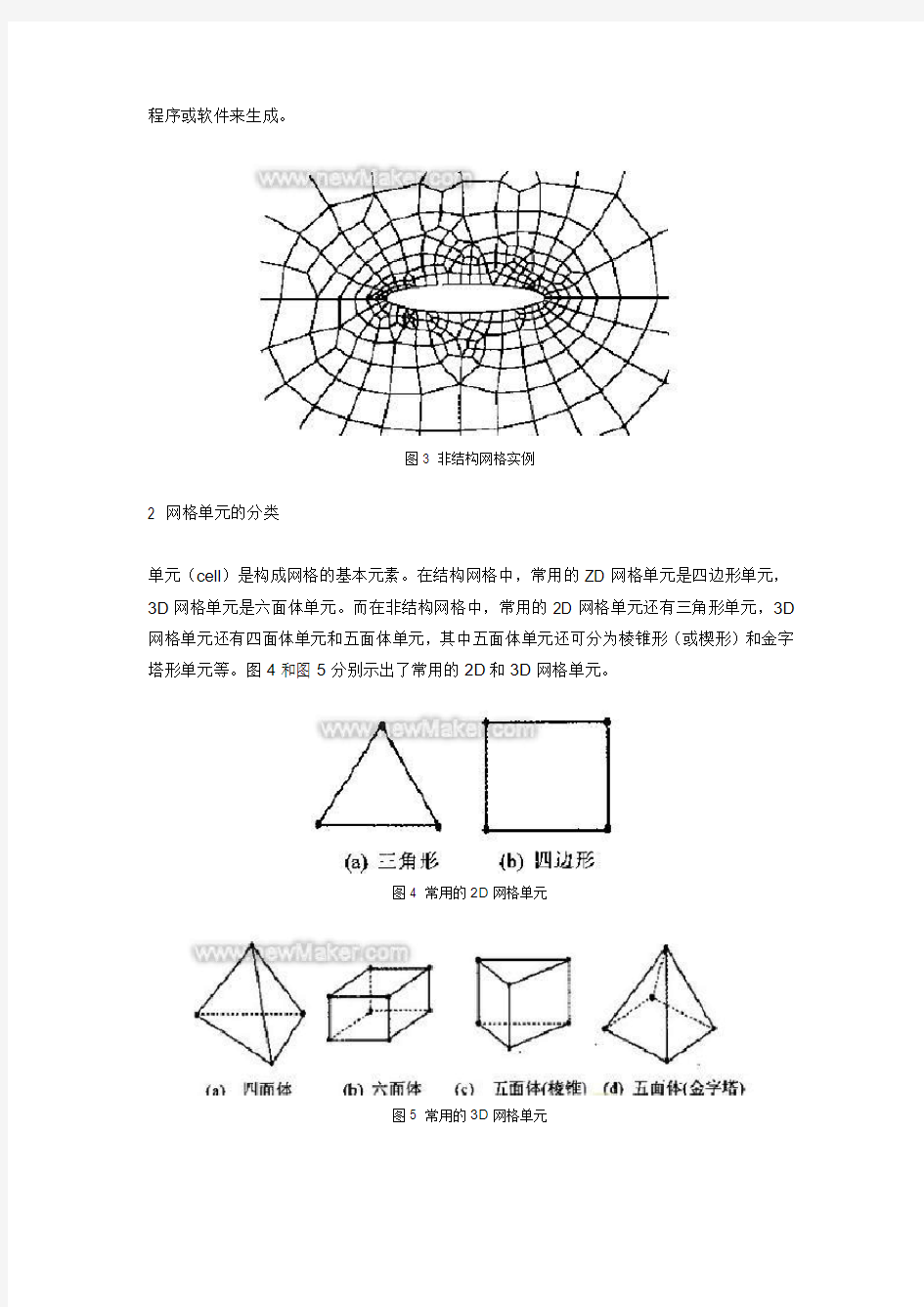
与结构网格不同,在非结构网格(unstructured grid)中,节点的位置无法用一个固定的法则予以有序地命名。图3是非结构网格示例。这种网格虽然生成过程比较复杂,但却有着极好的适应性,尤其对具有复杂边界的流场计算问题特别有效。非结构网格一般通过专门的
程序或软件来生成。
图3 非结构网格实例
2 网格单元的分类
单元(cell)是构成网格的基本元素。在结构网格中,常用的ZD网格单元是四边形单元,3D网格单元是六面体单元。而在非结构网格中,常用的2D网格单元还有三角形单元,3D 网格单元还有四面体单元和五面体单元,其中五面体单元还可分为棱锥形(或楔形)和金字塔形单元等。图4和图5分别示出了常用的2D和3D网格单元。
图4 常用的2D网格单元
图5 常用的3D网格单元
3 单连域与多连域网格
网格区域(cell zone)分为单连域和多连域两类。所谓单连域是指求解区域边界线内不包含有非求解区域的情形。单连域内的任何封闭曲线都能连续地收缩至点而不越过其边界。如果在求解区域内包含有非求解区域,则称该求解区域为多连域。所有的绕流流动,都属于典型的多连域问题,如机翼的绕流,水轮机或水泵内单个叶片或一组叶片的绕流等。图2及图3均是多连域的例子。
对于绕流问题的多连域内的网格,有O型和C型两种。O型网格像一个变形的圆,一圈一圈地包围着翼型,最外层网格线上可以取来流的条件,如图6所示。C型网格则像一个变形的C字,围在翼型的外面,如图7所示。这两种网格部属于结构网格。
图6 O型网格
图7 C型网格
4 生成网格的过程
无论是结构网格还是非结构网格,都需要按下列过程生成网格:
(1)均建立几何模型。几何模型是网格和边界的载体。对于二维问题,几何模型是二维面;对于三维问题,几何模型是三维实体。
(2)划分网格。在所生成的几何模型土应用特定的网格类型、网格单元和网格密度对面或体进行划分,获得网格。
(3)指定边界认域。为模型的每个区域指定名称和类型,为后续给定模型的物理属性、边界条件和初始条件做好准备。
生成网格的关键在上述过程中的步骤(2)。由于传统的CFD基于结构网格,因此,目前有多种针对结构网格的成熟的生成技术,而针对非结构网格的生成技术要更复杂一些。
5 生成结构网格的贴体坐标法
如果计算区域的各边界是一个与坐标轴都平行的规则区域,则可以很方便地划分该区域,快速生成均匀网格。但实际工程问题的边界不可能与各种坐标系正好相符,于是,需要采用数学方法构造一种坐标系,其各坐标轴恰好与被计算物体的边界相适应,这种坐标系就称为贴体坐标系(body-fitted coordinates)。直角坐标系是矩形区域的贴体坐标系,极坐标是环扇形区域的贴体坐标系。
使用贴体坐标系生成网格的方法的基本思想可叙述如下。
(a) x-y物理平面(b) ξ-η计算平面
图8 贴体坐标示意图
假定有图8(a)所示的在x-y少平面内的不规则区域,现在,为了构造与该区域相适应的贴体坐标系,在该区域中相交的两个边界作为曲线坐标系的两个轴,记为ξ和η。在该物体的4个边上,可规定不同地点的ξ和η值。例如,我们可假定在A点有ξ=0,η=0,而在C点有ξ=1,η=1。这样,就可把ξ-η看成是另一个计算平面上的直角坐标系的两个轴,根据上面规定的ξ和η的取值原则,在计算平面上的求解区域就简化成了一个矩形区域,只要给定每个方向的节点总数,立即可以生成一个均匀分布的网格,如图8(b)所示。现在,如果能在x-y平面上找出与ξ-η平面上任意一点相对应的位置,则在物理平面上的网格可轻松生成。因此,剩下的问题是如何建立这两个平面间的关系,这就是生成贴体坐标的方法。日前常用的生成贴体坐标的方法包括代数法和微分方程法。
所谓代数法就是通过一些代数关系把物理平面上的不规则区域转换成计算平面上的矩形区域。各种类型的代数法很多,常见的包括边界规范法、双边界法和无限插值法等。微分方程法是通过一个微分方程把物理平面转换成计算平面。该方法的实质是微分方程边值问题的求解。该方法是构造贴体坐标非常有效的方法,也是多数网格生成软件广泛采用的方法。在该方法中,可使用椭圆、双曲型和抛物型偏微分方程来生成网格,其中,椭圆型方程用得较多。关于代数法和微分方程法的详细信息可参考相关文献。
6 生成网格的专用软件
网格生成是一个“漫长而枯燥”的工作过程,经常需要进行大量的试验才能取得成功。因此,出现了许多商品化的专业网格生成软件。如GAMBIT、TGrid、GeoMesh、preBFC和ICEM CFD等。此外,一些CFD或有限元分结构分析软件,如ANSYS、I-DEAS、NASTRAN、PATRAN和ARIES等,也提供了专业化的网格生成工具。
这些软件或工具的使用方法大同小异,且各软件之间往往能够共享所生成的网格文件,例如FLUENT就可读取上述各软件所生成的网格。
有一点需要说明,由于网格生成涉及几何造型,特别是3D实体造型,因此,许多网格生成软件除自己提供几何建模功能外,还允许用户利用CAD软件(如AutoCAD、
Pro/ENGINEER)先生成几何模型,然后再导入到网格软件中进行网格划分。因此,使用
前处理软件,往往需要涉及CAD软件的造到功能。(end)
CFD网格及其生成方法概述
CFD网格及其生成方法概述 作者:王福军 网格是CFD模型的几何表达形式,也是模拟与分析的载体。网格质量对CFD计算精度和计算效率有重要影响。对于复杂的CFD问题,网格生成极为耗时,且极易出错,生成网格所需时间常常大于实际CFD计算的时间。因此,有必要对网格生成方式给以足够的关注。 1 网格类型 网格(grid)分为结构网格和非结构网格两大类。结构网格即网格中节点排列有序、邻点间的关系明确,如图1所示。对一于复杂的儿何区域,结构网格是分块构造的,这就形成了块结构网格(block-structured grids)。图2是块结构网格实例。 图1 结构网格实例 图2 块结构网格实例 与结构网格不同,在非结构网格(unstructured grid)中,节点的位置无法用一个固定的法则予以有序地命名。图3是非结构网格示例。这种网格虽然生成过程比较复杂,但却有着极好的适应性,尤其对具有复杂边界的流场计算问题特别有效。非结构网格一般通过专门的
程序或软件来生成。 图3 非结构网格实例 2 网格单元的分类 单元(cell)是构成网格的基本元素。在结构网格中,常用的ZD网格单元是四边形单元,3D网格单元是六面体单元。而在非结构网格中,常用的2D网格单元还有三角形单元,3D 网格单元还有四面体单元和五面体单元,其中五面体单元还可分为棱锥形(或楔形)和金字塔形单元等。图4和图5分别示出了常用的2D和3D网格单元。 图4 常用的2D网格单元 图5 常用的3D网格单元
3 单连域与多连域网格 网格区域(cell zone)分为单连域和多连域两类。所谓单连域是指求解区域边界线内不包含有非求解区域的情形。单连域内的任何封闭曲线都能连续地收缩至点而不越过其边界。如果在求解区域内包含有非求解区域,则称该求解区域为多连域。所有的绕流流动,都属于典型的多连域问题,如机翼的绕流,水轮机或水泵内单个叶片或一组叶片的绕流等。图2及图3均是多连域的例子。 对于绕流问题的多连域内的网格,有O型和C型两种。O型网格像一个变形的圆,一圈一圈地包围着翼型,最外层网格线上可以取来流的条件,如图6所示。C型网格则像一个变形的C字,围在翼型的外面,如图7所示。这两种网格部属于结构网格。 图6 O型网格 图7 C型网格 4 生成网格的过程
网格划分模版
生成的网格所能达到的基本指标 1概述 1.1控制网格质量的必要性 在CFD计算中数值误差,也即数值解与微分方程精确解之间的偏差,主要是由截断误差及网格划分不够细密所造成的。而当离散格式的截断误差确定以后,网格的疏密及其分布特性就成了决定离散误差的关键因素。一般在CFD计算中,第一步就是生成计算网格,流场的主要信息都存储在计算网格的节点或者界面上,网格生成质量的高低直接影响着数值分析结果的精度与稳定性。特别是近壁处及通量梯度较大的区域的网格分布最为关键。粗糙的网格会导致数值模拟精度的降低,甚至不能得到收敛解;而过细的网格一方面会耗费过多的计算资源,另一方面也可能导致离散误差的增加,选择适宜的精密网格对于提高计算精度非常关键。因此生成高质量的、适宜的精密网格是获得高精度数值模拟结果的必要条件,在进行CFD计算中必须控制网格的数量及质量。 1.2对计算网格的基本要求 网格分为结构化和非结构化两大类,由于结构化网格在计算精度、计算时间等方面存在相对优势,目前在CFD计算中广泛采用的仍是结构型网格。因此为确保计算结果的正确性及模拟的精度,本课题组要求尽量使用结构化网格,除非在极个别的情况下(如几何结构过于复杂,很难生成结构化网格)才允许使用非结构化网格。 对生成的六面体结构化网格的质量有以下几方面的要求: 首先计算网格中不允许存在负体积,这是保障计算网格正确性的基本要求。 网格单元的总体分布应尽量与主流方向保持一致。 有叶片的区域,应采用绕叶片的O型网格来处理边界层内的流动,另外,O型网格对网格加密很有利。 在所有计算区域的边界处的计算网格线应最大程度的与边界正交,角度最小应大于45°。 计算单元的纵横比不能过大,一般应控制在[1,100]之间,不应高于100。(Aspect Ratio,[1,∞],越接近于1表明网格质量越高)
网格生成及修正技巧
网格生成及修正技巧 1引言 网格是CFD 模型的几何表达形式,也是模拟与分析的载体。网格质量对CFD 计算精度和计算效率有着重要的影响。对于复杂的CFD 问题,网格的生成极为耗时,并且极易出错,生成网格所需的时间常常大于实际CFD 计算的时间。因此,有必要对网格生成以及修正方法进行足够的研究。 考虑到目前的CFD 计算多是通过专用的网格生成软件来划分所需要的网格,因此,本文就如何利用专用前处理软件GAMBIT 来介绍网格的生成和修正技巧。 2 网格类型 网格主要有两种:结构网格和非结构网格[1] [2]在结构网格中,常用的2D 网格单元是四边形单元,3D 网格单元是六面体单元。而在非结构网格中,常用的2D 网格单元还有三角形单元,3D 网格单元还有四面体单元和五面体单元,其中五面体单元还分为棱锥形(或楔形)和金字塔形单元等。结构网格的最大特点在于网格中节点排列有序,邻点间关系明确,结构简单,构造方便,与计算机语言自然匹配,容易计算,网格生成速度快,质量好,数据结构简单等优点;缺点是适用的范围比较窄,只适用于形状规则的图形,对复杂几何形状的适应能力差。非结构网格舍去了网格节点的结构性限制,易于控制网格单元的大小、形状及节点位置,灵活性好,对复杂外形的适应能力强——流场变化比较大的地方,可以进行局部网格加密。但其无规则性也导致了在模拟计算中存储空间增大,寻址时间增长,计算效率低于结构化网格,计算时间长等缺点。 [1]。 (a )三角形 (b )四边形 图1 常用的2D 网格单元 (a )四面体 (b )六面体 (c )五面体(凌锥) (d )五面体(金字塔) 图2 常用的3D 网格单元 3 单连域与多连域网格 网格区域分为单连域和多连域两类。所谓单连域是指求解区域边界线内不包含有非求解
网格生成技术
I 目录 1 概述 (1) 2 结构网格 (3) 2.1 贴体坐标法 (3) 2.2 块结构化网格 (11) 3 非结构网格 (16) 3.1 概述 (16) 3.2 阵面推进法 (16) 3.3 Delaunay三角划分 (19) 3.4 四叉树(2D)/八叉树(3D)方法 (21) 3.5 阵面推进法和Delaunay三角划分结合算法 (22) 4 其他网格生成技术 (23) 4.1 自适应网格 (23) 4.2 混合网格 (25) 4.3 动网格 (26) 4.4 曲面网格 (27) 4.5 重叠网格 (28) 5 网格生成软件 (29) 5.3 Gambit (29) 5.2 ICEM CFD (30) 5.1 TrueGrid (32) 5.2 Gridgen (34)
1 概述 计算流体力学作为计算机科学、流体力学、偏微分方程数学理论、计算几何、数值分析等学科的交叉融合,它的发展除依赖于这些学科的发展外,更直接表现于对网格生成技术、数值计算方法发展的依赖。 在计算流体力学中,按照一定规律分布于流场中的离散点的集合叫网格(Grid),分布这些网格节点的过程叫网格生成(Grid Generation)。网格生成是连接几何模型和数值算法的纽带,几何模型只有被划分成一定标准的网格才能对其进行数值求解,所以网格生成对CFD至关重要,直接关系到CFD计算问题的成败。一般而言,网格划分越密,得到的结果就越精确,但耗时也越多。1974年Thompson等提出采用求解椭圆型方程方法生成贴体网格,在网格生成技术的发展中起到了先河作用。随后Steger等又提出采用求解双曲型方程方法生成贴体网格。但直到20世纪80年代中期,相比于计算格式和方法的飞跃发展,网格生成技术未能与之保持同步。从这个时期开始,各国计算流体和工业界都十分重视网格生成技术的研究。上个世纪90年代以来迅速发展的非结构网格和自适应笛卡尔网格等方法,使复杂外形的网格生成技术呈现出了更加繁荣发展的局面。现在网格生成技术已经发展成为CFD的一个重要分支,它也是计算流体动力学近20年来一个取得较大进展的领域。也正是网格生成技术的迅速发展,才实现了流场解的高质量,使工业界能够将CFD的研究成果——求解Euler/NS方程方法应用于型号设计中。 随着CFD在实际工程设计中的深入应用,所面临的几何外形和流场变得越来越复杂,网格生成作为整个计算分析过程中的首要部分,也变得越来越困难,它所需的人力时间已达到一个计算任务全部人力时间的60%左右。在网格生成这一“瓶颈”没有消除之前,快速地对新外形进行流体力学分析,和对新模型的实验结果进行比较分析还无法实现。尽管现在已有一些比较先进的网格生成软件,如ICEM CFD、Gridgen、Gambit等,但是对一个复杂的新外形要生成一套比较合适的网格,需要的时间还是比较长,而对于设计新外形的工程人员来说,一两天是他们可以接受的对新外形进行一次分析的最大周期。要将CFD从专业的研究团体中脱离出来,并且能让工程设计人员应用到实际的设计中去,就必须首先解决网格生成的自动化和即时性问题,R.Consner等人在他们的一篇文章中,详细地讨论了这些方面的问题,并提出:CFD研究人员的关键问题是“你能把整个设计周期缩短多少天?”。而缩短设计周期的主要途径就是缩短网格生成时间和流场计算时间。因此,生成复杂外形网格的
ICEM万能网格方法介绍
ICEM万能网格方法 众所周知,ICEM CFD以其强大的网格划分能力闻名于世,同其他类似网格划分软件一样,ICEM提供了结构网格和非结构网格划分功能。结构网格质量一般较高,有利于提高数值分析精度,但是对于过于复杂的几何体,其缺点也是显而易见的:需要耗费大量人力思考块的划分方式,且经常造成局部网格质量偏低的局面。而非结构网格因其快速、智能化划分方式获得了人们的青睐,但其网格形式一般呈四面体或三角形,不易于流动方向垂直,进而经常造成数值扩散。 那么有没有更好的网格划分方式,能够将结构网格和非结构网格的优点结合在一起,既能又快又好的生成网格、又提高计算精度呢?答案是肯定的。CFD资料专营店老板在研究所搞数值计算多年,对于网格划分更是非常熟悉,在这里总结了ICEM CFD中两种核心技术----六面体核心网格和混合网格技术的使用方法,这两种办法可以说适用于所有复杂几何体,是万能的!希望能够为因几何结构过于复杂、苦于无法做出较高质量结构网格、却又不想使用非结构网格的同仁们提供新的思路,帮你们打通网格难关! 一、六面体核心网格技术 ICEM CFD中有一种新技术,即六面体核心网格技术,其原理是首先生成四面体网格,然后通过先进算法,将大部分区域内的四面体网格破碎、整合成六面体网格,只有在几何非常复杂或者边缘地带才会保留四面体网格。这样生成的网格集合了四面体网格和六面体网格的优势,既节省时间;因为大部分区域是结构网格、完全可以与流
动方向垂直,因而能够保证计算精度。除此之外,六面体核心网格还能在四面体网格的基础上减少约60%-80%的网格数量,非常有利于充分利用计算机资源,加快计算时间。 效果如图所示: (图1)未使用六面体核心网格技术的网格截面 (图2)使用六面体核心网格技术后的网格截面
自动网格生成法
自动网格生成法 二维网格生成—Advancing Front方法 从概念上来讲,Advancing front方法是最简洁的方法之一。单位元素生成算法始于一个特殊边界条件所定义的“front”,此算法逐级地生成各个元素,同时“front”元素离散地前进,直至整个区域都被元素所覆盖。 网格生成过程包括三个主要步骤: 1、在边界上生成节点,形成一个离散的区域边界。 2、在离散区域边界内生成元素(亦或节点)。 3、强化节点形状以提高网格图形清晰度。 在介绍这个方法之前我们先介绍以下有关于二维空间地几何表示。 一、二维网格的几何特征 我们利用网格参数(一般是空间的函数)来表征网格的一些性质,诸如节点尺寸,节点形状和节点方向等等。网格参数包括两个相互正交的单位矢量a1和a2表示的方向参数,和由两个相互正交代表节点形状的矢量的模值h1和h2。前者表征网格节点伸展的方向,注意的是,只有在生成的是非各向同性的网格内,方向参数才有定义,否则方向矢量是常单位矢量,而尺寸参数有h1=h2,这样就定义了各向同性的平凡网格。 二、区域的几何表示 边界曲线的表示: 我们一般用组合参数样条线表示曲线边界单位,利用参数t,我们利用二维矢量函数表达出曲线边界: r t=x t,y t,0≤t≤1 一般来讲,一条组合样条曲线至少是C1连续的,以保证边界曲线平滑和算法要求的数学连续性。我们下面将要用厄米三阶样条线,当然还有许多就不一一举例了。 样条线的参数表达式如下: X t=H0t,H1t,G0t,G1t?x0,x1,x,t0,x,t1T,0≤t≤1 转置的前两项是曲线的两个端点,而后两项是它们对t求导现在端点处的值。另外G和H分别是四个三阶厄米多项式: H0t=1?3t2+2t3 ; H1t=3t2?2t3 G0t=t?2t2+t3 ; G1t=?t2+t3 此时,参数表达式可以通过一个系数矩阵来描述: X t=1,t,t2,t3M x0,x1,x,t0,x,t1T,0≤t≤1 其中M矩阵读者很容易写出,是一个4*4的方阵,而每一列是这些厄米多项式的系数排列而成。我们把这个表示称之为样本表示。每个边界都包含n个这样的数据点: x i,i=1,2,3,……,n 利用内插法可以构造出如下形式的关系式: X u=H0t x u i?1+H1t x u i+Δi G0t x,t u i?1+Δi G1t x,t u i 其中Δi是单位区间的长度。同时参数t也变为离散的取值是单位区间从原点到任意点所有的个数。如果参数的离散取值正好是i,那么u的表达式将简化为:
并行网格生成技术
并行网格生成技术 分类 基于以下三种网格生成技术:Delaunay 网格前沿法,边细分法。 并行网格生成将原始网格生成问题划分成N个子问题来求解。 子问题的求解可分为以下三种形式: 紧耦合,部分耦合,无耦合。 并行网格生成中的难点在于 1.维持并行算法的稳定性,使得并行算法的结果正确。 2.代码重用:将原始算法移植为并行算法时不需要改动原始算法代码,并且能保证并行算法的正确性。 基于Delaunay的方法 空洞算法: 上述算法并行化后引发如下问题:
图(a)中两个空洞相交,使得产生的三角剖分边相交。 图(b)中两个空洞共享一条边,使得最终产生的剖分可能不满足德劳内空圆准则。 紧耦合算法: Parallel Optimistic Delaunay Meshing Method (PODM) PODM算法对子网格划分没有要求,这个算法通过重新划分子网格边界来保证算法稳定性。如下图(a)所示,空洞扩展到子区域之外时,将通过子区域之间的通信来保证算法的正确性。因此,这个算法是紧耦合的,不具备代码重用性。 图(a)是空洞扩展到子区域之外的情况。 图(b)是并行插入时的同步时间图。 无耦合算法: Parallel Projective Delaunay Meshing (PPDM) PPDM算法的基本思想是预先计算出Delaunay-admissible子区域边界。即,最终生成的Delaunay剖分将包括这个边界。
这样,每个子网格就可以完全独立的计算各自剖分。 因此,这个算法是无耦合并且是可完全代码复用的。 生成Delaunay-admissible子区域边界的基本思想如下: 先生成三维点集的一个凸壳。首先用Inertia Axis分割法将凸壳用平面II分成两个近似相等 的部分。然后搜索所有三角面(如上图),使得存在一个空球,球心在平面II上,球面经过P,Q,R且球内不包含其它任何点。这样,这些三角面就构成了一个Delaunay-admissible边界。 部分耦合算法: Parralel Constrained Delaunay Meshing (PCDM) method
有限元网格剖分方法概述
有限元网格剖分方法概述 在采用有限元法进行结构分析时,首先必须对结构进行离散,形成有限元网格,并给出与此网格相应的各种信息,如单元信息、节点坐标、材料信息、约束信息和荷载信息等等,是一项十分复杂、艰巨的工作。如果采用人工方法离散对象和处理计算结果,势必费力、费时且极易出错,尤其当分析模型复杂时,采用人工方法甚至很难进行,这将严重影响高级有限元分析程序的推广和使用。因此,开展自动离散对象及结果的计算机可视化显示的研究是一项重要而紧迫的任务。 有限元网格生成技术发展到现在, 已经出现了大量的不同实现方法,列举如下: 映射法 映射法是一种半自动网格生成方法,根据映射函数的不同,主要可分为超限映射和等参映射。因前一种映射在几何逼近精度上比后一种高,故被广泛采用。映射法的基本思想是:在简单区域内采用某种映射函数构造简单区域的边界点和内点,并按某种规则连接结点构成网格单元。也就是根据形体边界的参数方程,利用映射函数,把参数空间内单元正方形或单元三角形(对于三维问题是单元立方体或单元四面体)的网格映射到欧氏空间,从而生成实际的网格。这种方法的主要步骤是,首先人为地把分析域分成一个个简单可映射的子域,每个子域为三角形或四边形,然后根据网格密度的需要,定义每个子域边界上的节点数,再根据这些信息,利用映射函数划分网格。 这种网格控制机理有以下几个缺点: (1)它不是完全面向几何特征的,很难完成自动化,尤其是对于3D区域。 (2)它是通过低维点来生成高维单元。例如,在2D问题中,先定义映射边界上的点数,然后形成平面单元。这对于单元的定位,尤其是对于远离映射边界的单元的定位,是十分困难的,使得对局部的控制能力下降。 (3)各映射块之间的网格密度相互影响程度很大。也就是说,改变某一映射块的网格密度,其它各映射块的网格都要做相应的调整。 其优点是:由于概念明确,方法简单,单元性能较好,对规则均一的区域,适用性很强,因此得到了较大的发展,并在一些商用软件如ANSYS等得到应用。 2 。拓扑分解法 拓扑分解法较其它方法发展较晚, 它首先是由Wordenwaber提出来的。该方法假设最后网格顶点全部由目标边界顶点组成, 那么可以用一种三角化算法将目标用尽量少的三角形完全分割覆盖。这些三角形主要是由目标的拓扑结构决定, 这样目标的复杂拓扑结构被分解成简单的三角形拓扑结构。该方法生成的网格一般相当粗糙, 必须与其它方法相结合, 通过网格加密等过程, 才能生成合适的网格。该方法后来被发展为普遍使用的目标初始三角化算法, 用来实现从实体表述到初始三角化表述的自动化转换。 单一的拓扑分解法因只依赖于几何体的拓扑结构使网格剖分不理想,有时甚至很差。 3.连接节点法 这类方法一般包括二步:区域内布点及其三角化。早期的方法通常是先在区域内布点, 然后再将它们联成三角形或四面体, 在三角化过程中, 对所生成的单元形状难于控制。随着Delaunay三角化(简称为DT ) 方法的出现, 该类方法已成为目前三大最流行的全自动网格生成方法之一。 DT法的基本原理:任意给定N个平面点Pi(i=1,2,…,N)构成的点集为S,称满足下列条件的点集Vi为Voronoi多边形。其中,Vi满足下列条件: Vi ={ X:|X- Pi|(|X- Pj|,X(R2,i(j,j=1,2,…,N }Vi为凸多边形,称{ Vi}mi=1为Dirichlet Tesselation
流体机械CFD中的网格生成方法进展
文章编号: 1005 0329(2010)04 0032 06 技术进展 流体机械CFD中的网格生成方法进展 刘厚林,董 亮,王 勇,王 凯,路明臻 (江苏大学,江苏镇江 212013) 摘 要: 网格生成技术是流体机械内部流动数值模拟中的关键技术之一,直接影响数值计算的收敛性,决定着数值计算结果最终的精度及计算过程的效率;本文在分析大量文献的基础上,首先,对流体机械CFD中的网格生成方法即结构化网格、非结构化网格、混合网格进行了比较全面的总结,系统地分析这些网格划分方法的机理、特点及其适用范围;其次,对特殊的网格生成技术,如曲面网格生成技术、动网格技术、重叠网格生成技术、自适应网格技术进行了阐述;再次,指出了良好的网格生成方法应具备的特点;最后提出了网格生成技术的发展趋势。 关键词: 流体机械;网格生成;计算流体动力学;动网格;自适应网格 中图分类号: TH311 文献标识码: A do:i10.3969/.j i ssn.1005-0329.2010.04.008 Overvie w onM esh Generati o n M et hods i n CF D of F lui d M achinery L IU H ou-lin,DONG L iang,W ANG Y ong,W ANG K a,i LU M i ng-zhen (Jiangsu U n i v ers it y,Zhenji ang212013,Ch i na) Abstrac t: M esh genera ti on techno logy i s one of the cr iti ca l technology f o r fl u i d m ach i nery fl ow nume rica l s i m u l at-i on,and d-i rectly i nfl uence t he astr i ngency o f nume rical si m u l a ti on,wh ich has an i m portan t e ffect on the nu m er ica l s i m u l a tion results,fi na l precision and the effi c i ency o f compu tati onal process.O n the bas i s o f analyzi ng a great dea l litera t ures,firstl y,m esh genera ti on m ethods and t heory of fluid m ach i nery are comprehens i ve l y su mm ar i zed such as structured mesh,unstructured mesh,hybrid gr i d and respecti ve re lati ve m erits and the pr i nciple,charac teristcs and scopes of t hese m ethods we re sy stema ti ca lly ana l ysed.Second-ly,Spec i a lm esh generation m ethod w ere su mm ar i zed,such as surface m eshi ng,m ov ing gr i d,adapti ve gr i d and especiall y i ntro-duced the pr i nci p le and app licati on areao f adapti ve g ri d.T h irdly,the character i sti c o f m esh g enerati on m e t hod w ere pion ted out. F i na lly,t he trends of mesh generati on are presen ted,and the tre m endous d ifference i s analyzed i n mesh au t om atic gene ra tion at a-broad and the necessary o f exp l o iti ng CFD soft w are and resea rchi ng the m esh auto m atic gene ration techn i que i n our country are put forwa rd. K ey word s: fl uids m achi nery;m esh g enerati on;co m puta ti ona l fl u i d dyna m ics;mov i ng gr i d;adaptive gr i d 1 前言 计算流体动力学(CFD)中,按一定规律分布于流场中的离散点的集合叫网格,产生这些节点的过程叫网格生成。网格生成是连接几何模型和数值算法的纽带,几何模型只有被划分成一定标准的网格时才能对其进行数值求解,一般而言,网格划分越密,得到的结果就越精确,但耗时也越多。数值计算结果的精度及效率主要取决于网格及划分时所采用的算法[1],它和控制方程的求解是数值模拟中最重要的两个环节。网格生成技术已经发展成为流体机械CFD的一个重要分支。现有的网格生成方法主要分为结构化网格、非结构化网格和混合网格三大类。 收稿日期: 2009 11 04 基金项目: 国家杰出青年基金(50825902);国家 863 计划(2006AA05Z250)
网格生成及修正技巧
网格生成及修正技巧 1引言 网格是CFD模型的几何表达形式,也是模拟与分析的载体。网格质量对CFD计算精度和计算效率有着重要的影响。对于复杂的CFD问题,网格的生成极为耗时,并且极易出错,生成网格所需的时间常常大于实际CFD计算的时间。因此,有必要对网格生成以及修正方法进行足够的研究。 考虑到目前的CFD计算多是通过专用的网格生成软件来划分所需要的网格,因此,本文就如何利用专用前处理软件GAMBIT来介绍网格的生成和修正技巧。 2 网格类型 网格主要有两种:结构网格和非结构网格[1] [2]。结构网格的最大特点在于网格中节点排列有序,邻点间关系明确,结构简单,构造方便,与计算机语言自然匹配,容易计算,网格生成速度快,质量好,数据结构简单等优点;缺点是适用的范围比较窄,只适用于形状规则的图形,对复杂几何形状的适应能力差。非结构网格舍去了网格节点的结构性限制,易于控制网格单元的大小、形状及节点位置,灵活性好,对复杂外形的适应能力强——流场变化比较大的地方,可以进行局部网格加密。但其无规则性也导致了在模拟计算中存储空间增大,寻址时间增长,计算效率低于结构化网格,计算时间长等缺点。 在结构网格中,常用的2D网格单元是四边形单元,3D网格单元是六面体单元。而在非结构网格中,常用的2D网格单元还有三角形单元,3D网格单元还有四面体单元和五面体单元,其中五面体单元还分为棱锥形(或楔形)和金字塔形单元等[1]。 (a)三角形(b)四边形 图1 常用的2D网格单元 (a)四面体(b)六面体(c)五面体(凌锥)(d)五面体(金字塔) 图2 常用的3D网格单元 3 单连域与多连域网格 网格区域分为单连域和多连域两类。所谓单连域是指求解区域边界线内不包含有非求解
网格生成技术概述
§9网格生成技术概述 所谓网格划分就是把空间上连续的计算区域划分成许多子区域,并确定每个子区域中的节点。网格划分的实质就是用一组有限个离散的点来代替原来连续的空间。 网格生成技术是计算传热学(NHT)和计算流体力学(CFD)的重要组成部分,在目前的CFD&NHT工作周期中,网格生成所需人力时间约占一个计算任务全部人力时间的60%左右,网格质量的好坏直接影响数值结果的精度,甚至影响数值计算的成败。可见网格生成技术是CFD&NHT作为工程应用的有效工具需要解决的关键技术之一。 最初,因为主要从事理论研究,求解的方程通常是比较简单的模型方程。对于二维问题,常在比较规则的区域内研究问题,此时针对具体的问题可用较简单的代数方法生成网格,并做简单的自适应,网格问题并不突出。但是对于有实际应用价值背景的问题,如航空航天飞行中的高超声速流动、跨音速流动以及其它多介质、高温高压系统的计算流体力学问题。这些问题所涉及的流场十分复杂,会出现各种形式的间断,必须采用非常密的网格才能对间断有较高的分辨,从而达到需要的计算精度。事实上,计算流体力学的发展除了依赖于计算机和数值计算方法的发展以外,还在很大程度上依赖于网格技术的发展。因此,近几十年来网格生成技术己受到越来越多的计算数学家、计算流体力学家的重视,并己经成为计算流体力学发展的一个重要分支。 1. 网格单元的分类 单元(cell)是构成网格的基本元素。在结构网格中,常用的2D网格单元是四边形单元,3D网格单元是六面体单元。而在非结构网格中,常用的2D网格单元还有三角形单元,3D网格单元还有四面体单元和五面体单元,其中五面体单元还可分为棱锥形(或楔形)和金字塔形单元等。图1和图2分别示出了常用的2D和3D网格单元。
网格生成技术
1. 网格生成技术 数值模拟流体运动时,首先将流动区域离散成一定形状的网格,然后在网格节点上求解离散化的控制方程。数值模拟的计算精度既与控制方程的离散格式的精度密切相关,也与网格结构和分布有关,为了尽量减少计算误差,保证解的稳定性,生成的网格至少满足下面的一些原则: ①网格的贴体性。计算网格应准确反映流动区域的边界形状,并且要能较容易的引入边界条件。 ②网格的疏密变化。在物理梯度大的地方,网格要密些,以提高对流动结构的捕捉能力,搞高数值模拟的精度。另外,由于在数值模拟之前,人们对流动结构的主要特征不甚了然,如哪此地方会出现旋涡,水跃、激波会产生在什么地方等,因此,计算网格最好能根据计算结果的变化而进行调整,即网格具有自适应性。 由于流动边界和流体运动结构的复杂性,自动生成复杂流场的理想分布网格相当困难,网格生成所费人力也很高,即使在计算流体力学高度发展的国家,网格生成仍占一个计算任务全部人力时间的60%~80%,因此,网格生成技术成为了CFD(计算流体力学)中一个独立的分支,网格生成技术也是CFD中最活跃的研究领域之一。目前,网格生成方法很多,根据网格拓扑结构可分为两大类:即结构网格和非结构网格。
1.1结构网格的生成 结构网格中网格节点与邻点相连,连方式与节点的位置无关,如二维空间中的矩形网格、三维空间中的六面体网格。对于简单的计算区域,很容易进行结构网格的剖分,对于复杂的流动区域,尽管可以采用阶梯形网格对边界进行近似处理,但是这种处理通用性差,且会影响计算精度,为解决这个问题,人们一般采用坐标变换技术生成计算网格。 坐标变换生成计算网格又称贴体坐标技术,其基本思想是通过数学变换将复杂的物理区域变换到规则的计算空间中,物理空间和计算空间一一对应。目前生成贴体拟合坐标的方法可以分成代数变换和偏微分方程变换两大类。代数变换网格生成是用代数公式,一般为显示,给出物理区域和计算区域之间的对应关系,常用的方法有保角变换(conformal mapping)、剪切变换(shearing transformation)和Hermit变换等。代数变换网格生成方法应用范围有限,其原因是对于复杂的计算区域,代数变换较难实现,边界附近的节点控制也十分困难。偏微分方程方法用微分方程将不规则区域变换成规则区域,其通用性较好,又有生成的网格均匀、网格疏密易于控制等优点,由此得到了普遍的应用。 Winslow于1967年提出用偏微分方程生成计算网格的思想,后来,Thompson,Thomas和Mastin对这一方法进行了全面而系统的研究,提出了著名的TTM方法。在TTM方法中,计算网格控制方程中源项的各控制参数的选取没有一定之规,具体参数的选取与研究者
网格生成技术之无限插值法
¤Grid Generation Series¤ 网格生成???适体坐标系???代数方法???无限插值法 Copyright ? 2007 https://www.360docs.net/doc/0610223637.html, 版权所有
目录 1. 概述 (1) 1.1前序 (1) 1.2名词解释 (1) 1.3映射关系 (1) 2. 二维无限插值法生成网格 (2) 2.1模型公式 (2) 2.2操作步骤 (3) 2.3编程实例 (3) 3. 三维无限插值法生成网格 (9) 3.1计算公式 (9) 3.2编程实例 (11) 4. 参考文献 (16) 5. 版权声明 (17)
1. 概述 1.1前序 网格生成技术的编程实现与应用曾是笔者感觉深奥而有趣的事情。因对这方面并不熟悉,2006年夏初,笔者决定做网格生成方面的努力。查看了若干资料后,虽对其数学原理未有涉足,但还是有幸获得或推出了生成二维网格和三维网格生成的TFI实现公式,并编写了测试程序进行验证,如封面图片的网格就是当时笔者用TFI方法编程生成的。 后来忙别的事情,就一直落在“纸堆”里。2007年夏初,有网友询问TFI,又想起来,于是四处找了找,看着笔记,发现一年前的清晰思路都模糊了。当时在图书馆借过一本书对我的帮助也很大,但书名已记不起来了,无法在后面的参考文献中列出。现在决定用休息时间把笔记整理一下,以供需要的朋友查阅。 无限插值法(TFI)是结构化网格生成技术中属于适体坐标系的代数方法。其优点是算法简单、生成网格速度很快,对于较规则区域,TFI法得到的网格效果也令人满意。 对于没有把握的复杂区域,笔者认为最好采用TFI方法生成初始网格场,然后采用PDE(偏微分网格生成技术)进行网格场优化。 1.2名词解释 (1)网格生成技术:对给定区域进行离散以生成计算网格的方法。 (2)结构化网格:排列有序、相邻节点位置关系明确的网格。 (3)适体坐标系:坐标轴与计算区域的边界一致的坐标系,又称贴体坐标系、附体坐标系。(4)代数方法:通过代数关系式创建物理平面上的区域与计算平面上的区域的映射方法。(5)无限插值法:把边界上规定的对应关系连续插值到区域内部,插值的点数是无限的,因而称为无限插值(transfinite interpolation,TFI)。 (6)物理空间:真实的求解区域。通常不规则,不易进行网格节点剖分计算。 (7)计算空间:进行网格节点剖分的区域。规则,最常见的为矩形区域或长方体,网格节点定位计算简单。 1.3映射关系 在计算空间内剖分得到的节点需要映射回物理空间,以便于进行物理求解。适体坐标的网格生成方法的核心就在于,给出从计算空间到物理空间,节点位置的数学映射关系。
网格划分技术简介
网格划分技术简介 复杂几何模型的系列网格划分技术 众所周知,对于有限元分析来说,网格划分是其中最关键的一个步骤,网格划分的好坏直接影响到解算的精度和速度。在ANSYS中,大家知道,网格划分有三个步骤:定义单元属性(包括实常数)、在几何模型上定义网格属性、划分网格。在这里,我们仅对网格划分这个步骤所涉及到的一些问题,尤其是与复杂模型相关的一些问题作简要阐述。 一、自由网格划分 自由网格划分是自动化程度最高的网格划分技术之一,它在面上(平面、曲面)可以自动生成三角形或四边形网格,在体上自动生成四面体网格。通常情况下,可利用ANSYS的智能尺寸控制技术(SMARTSIZE命令)来自动控制网格的大小和疏密分布,也可进行人工设置网格的大小(AESIZE、LESIZE、KESIZE、ESIZE等系列命令)并控制疏密分布以及选择分网算法等(MOPT命令)。对于复杂几何模型而言,这种分网方法省时省力,但缺点是单元数量通常会很大,计算效率降低。同时,由于这种方法对于三维复杂模型只能生成四面体单元,为了获得较好的计算精度,建议采用二次四面体单元(92号单元)。如果选用的是六面体单元,则此方法自动将六面体单元退化为阶次一致的四面体单元,因此,最好不要选用线性的六面体单元(没有中间节点,比如45号单元),因为该单元退化后为线性的四面体单元,具有过刚的刚度,计算精度较差;如果选用二次的六面体单元(比如95号单元),由于其是退化形式,节点数与其六面体原型单元一致,只是有多个节点在同一位置而已,因此,可以利用TCHG命令将模型中的退化形式的四面体单元变化为非退化的四面体单元,减少每个单元的节点数量,提高求解效率。在有些情况下,必须要用六面体单元的退化形式来进行自由网格划分,比如,在进行混合网格划分(后面详述)时,只有用六面体单元才能形成金字塔过渡单元。对于计算流体力学和考虑集肤效应的电磁场分析而言,自由网格划分中的层网格功能(由LESIZE命令的LAYER1和LAYER2域控制)是非常有用的。 二、映射网格划分 映射网格划分是对规整模型的一种规整网格划分方法,其原始概念是:对于面,只能是四边形面,网格划分数需在对边上保持一致,形成的单元全部为四边形;对于体,只能是六面体,对应线和面的网格划分数保持一致;形成的单元全部为六面体。在ANSYS中,这些条件有了很大的放宽,包括: 1 面可以是三角形、四边形、或其它任意多边形。对于四边以上的多边形,必须用LCCAT命令将某些边联成一条边,以使得对于网格划分而言,仍然是三角形或四边形;或者用AMAP命令定义3到4个顶点(程序自动将两个顶点之间的所有线段联成一条)来进行映射划分。 2 面上对边的网格划分数可以不同,但有一些限制条件。 3 面上可以形成全三角形的映射网格。 4 体可以是四面体、五面体、六面体或其它任意多面体。对于六面以上的多面体,必须用ACCAT命令将某些面联成一个面,以使得对于网格划分而言,仍然是四、五或六面体。 5 体上对应线和面的网格划分数可以不同,但有一些限制条件。 对于三维复杂几何模型而言,通常的做法是利用ANSYS布尔运算功能,将其切割成一系列四、五或六面体,然后对这些切割好的体进行映射网格划分。当然,这
CFD分析的结构化网格自动生成方法
CFD分析的结构化网格自动生成方法 在CFD分析的全自动优化过程中,一个关键任务就是如何实现模型、网格 的自动生成以及CFD流场分析的自动运行。最近,我们在的一个名为“GAMMA”研究项目中,遇到这样一个难题——要求自动的生成一个结构化网格。 为什么要结构化网格 与非结构化网格相比,结构化网格可以极大地加快流场分析,并且能得到一 个精度较好的结果。在大型设计研究中进行高质量的分析时,两者都可以很好的 应用。然而,在优化研究中,非结构化网格的自动化生成会更加容易实现——只 需几何模型就可以实现。结构画网格却不是这么简单。 结构网格的挑战 关键问题在于结构化网格如何去填充一个任意几何的全部特征?举个我们 研究的例子,例如涡轮增压器的蜗壳,它就存在一个虽然很小,但却很难处理的 几何特征——蜗舌。如下图所示: 整体结构图——造成结构网格困难的区域 蜗舌区域是蜗管体和出口段之间的过渡区域。这对于结构网格来说有点复杂。对于蜗管主体,可以很好划分结构化网格,一般这部分的结构化网格方式比较明确。但是在蜗壳存在蜗舌结构,如何对蜗舌处划分结构化网格?在这里就有一些 用户迷茫了。
几何框架 考虑在这样的蜗壳几何生成结构化网格,那么就需要要为网格系统提取一些有用的信息。对于各类复杂几何,是不可能只以一种方式来自动生成结构化网格。我们所做的不仅是生成出新设计的网格,还基于CAESES软件建立一套基于模型参数化的几何框架(能引导生成结构化网格),它在某种逻辑上展示了网格是如何划分的,然后用该几何框架生成结构画网格。下图展示了几何框架是如何布置的。 CAESES中自动结构化网格的参数化几何案例 通过这些几何信息,实现了对这个复杂几何结构的结构化网格划分。由于这些内部曲线是模型本身的一部分,所以当修改蜗壳的设计变量时,它们也会自动调整。对于无界面使用者,也可以在优化过程中通过脚本形式创建几何,实现相同的效果,例如通过外部优化工具控制。这也使得该方法能直接适用于HPC环境。 延伸方案 创建几何框架是一个额外的工作(加上创建自动化脚本以及相关工作)。然而,以一种灵活的方式来创建该几何模型,对于日后遇到类似项目时,就可以重复使用这套模型。例如,增压器涡轮叶片的周期性流道提取工作,就是一个创建
第3章 网格划分技术及技巧
第3章网格划分技术及技巧 创建几何模型后,必须生成有限元模型才能分析计算,生成有限元模型的方法就是对几何模型进行网格划分,网格划分主要过程包括三个步骤: ⑴定义单元属性 单元属性包括单元类型、实常数、材料特性、单元坐标系和截面号等。 ⑵定义网格控制选项 ★对几何图素边界划分网格的大小和数目进行设置; ★没有固定的网格密度可供参考; ★可通过评估结果来评价网格的密度是否合理。 ⑶生成网格 ★执行网格划分,生成有限元模型; ★可清除已经生成的网格并重新划分; ★局部进行细化。 3.1 定义单元属性 3.1.1 单元类型 1. 定义单元类型 命令:ET, ITYPE, Ename, KOP1, KOP2, KOP3, KOP4, KOP5, KOP6, INOPR ITYPE---用户定义的单元类型的参考号。 Ename---ANSYS单元库中给定的单元名或编号,它由一个类别前缀和惟一的编号组成,类别前缀可以省略,而仅使用单元编号。 KOP1~KOP6---单元描述选项,此值在单元库中有明确的定义,可参考单元手册。也可通过命令KEYOPT进行设置。 INOPR---如果此值为1则不输出该类单元的所有结果。 例如: et,1,link8 !定义LINK8单元,其参考号为1;也可用ET,1,8定义 et,3,beam4 !定义BEAM4单元,其参考号为3;也可用ET,3,4定义 2. 单元类型的KEYOPT 命令:KEYOPT,ITYPE,KNUM,V ALUE ITYPE---由ET命令定义的单元类型参考号。 KNUM---要定义的KEYOPT顺序号。 V ALUE---KEYOPT值。 该命令可在定义单元类型后,分别设置各类单元的KEYOPT参数。例如: et,1,beam4 !定义BEAM4单元的参考号为1 et,3,beam189 !定义BEAM189单元的参考号为3 keyopt,1,2,1 !BEAM4单元考虑应力刚度时关闭一致切线刚度矩阵 keyopt,3,1,1 !考虑BEAM189的第7个自由度,即翘曲自由度
Flow Simulation 网格划分技术简介
Flow Simulation的网格技术 Flow Simulation是以SolidWorks作为平台的CFD分析软件,它与其他主流的CFD分析软件一样,采用有限体积法。即将计算区域划分为一系列不重复的控制体积,并使每个网格点周围有一个控制体积;将待解的建立在流体动力学现象的微分方程对每一个控制体积积分,便得出一组离散方程。这个控制体积可以简单的理解为网格。划分网格是CDF分析中比较关键的一步,它关系到分析结果的精度。这就值得我们去讨论Flow Simulation的网格技术了。 一网格的要求和选择 我们在做任何CFD分析,都要对计算区域进行离散,即划分网格。网格是CFD 模型的几何表达形式,也是模拟与分析的载体。网格质量对CFD计算精度和计算效率有很大的影响。因此,我们对网格的划分要有足够的关注。 1 网格排列 网格分为结构网格和非结构网格两大类。结构网格即网格中节点排列有序、邻点间的关系明确,如图1所示。 图1 结构网格 与结构网格不同,在非结构网格中,节点的位置无法用一个固定的法则予以有序地命名。图2是非结构网格示例。这种网格虽然生成过程比较复杂,但却有着极好的适应性,尤其对具有复杂边界的流场计算问题特别有效。非结构网格一般通过专门的程序或软件来生成。另外,在某一区域内结构化网格与其它结构化网格以某种方式结合的网格,这种网格成为部分非结构化网格。
图2 非结构网格 2 网格单元的分类 单元是构成网格的基本元素。在结构网格中,常用的2D网格单元是四边形单元,3D网格单元是六面体单元。而在非结构网格中,常用的2D网格单元还有三角形单元,3D网格单元还有四面体单元和五面体单元,其中五面体单元还可分为棱锥形(或楔形)和金字塔形单元等。图3和图4分别示出了常用的2D和3D网格单元。 图3 常用的2D网格单元 图4常用的3D网格单元 另外,立方体形式的六面体网格,其网格面与笛卡儿坐标系中的X、Y、Z 轴