人工神经网络原理及实际应用

人工神经网络原理及实际应用
摘要:本文就主要讲述一下神经网络的基本原理,特别是BP神经网络原理,以及它在实际工程中的应用。
关键词:神经网络、BP算法、鲁棒自适应控制、Smith-PID
本世纪初,科学家们就一直探究大脑构筑函数和思维运行机理。特别是近二十年来。对大脑有关的感觉器官的仿生做了不少工作,人脑含有数亿个神经元,并以特殊的复杂形式组成在一起,它能够在“计算"某些问题(如难以用数学描述或非确定性问题等)时,比目前最快的计算机还要快许多倍。大脑的信号传导速度要比电子元件的信号传导要慢百万倍,然而,大脑的信息处理速度比电子元件的处理速度快许多倍,因此科学家推测大脑的信息处理方式和思维方式是非常复杂的,是一个复杂并行信息处理系统。1943年Macullocu和Pitts融合了生物物理学和数学提出了第一个神经元模型。从这以后,人工神经网络经历了发展,停滞,再发展的过程,时至今日发展正走向成熟,在广泛领域得到了令人鼓舞的应用成果。本文就主要讲述一下神经网络的原理,特别是BP神经网络原理,以及它在实际中的应用。
1.神经网络的基本原理
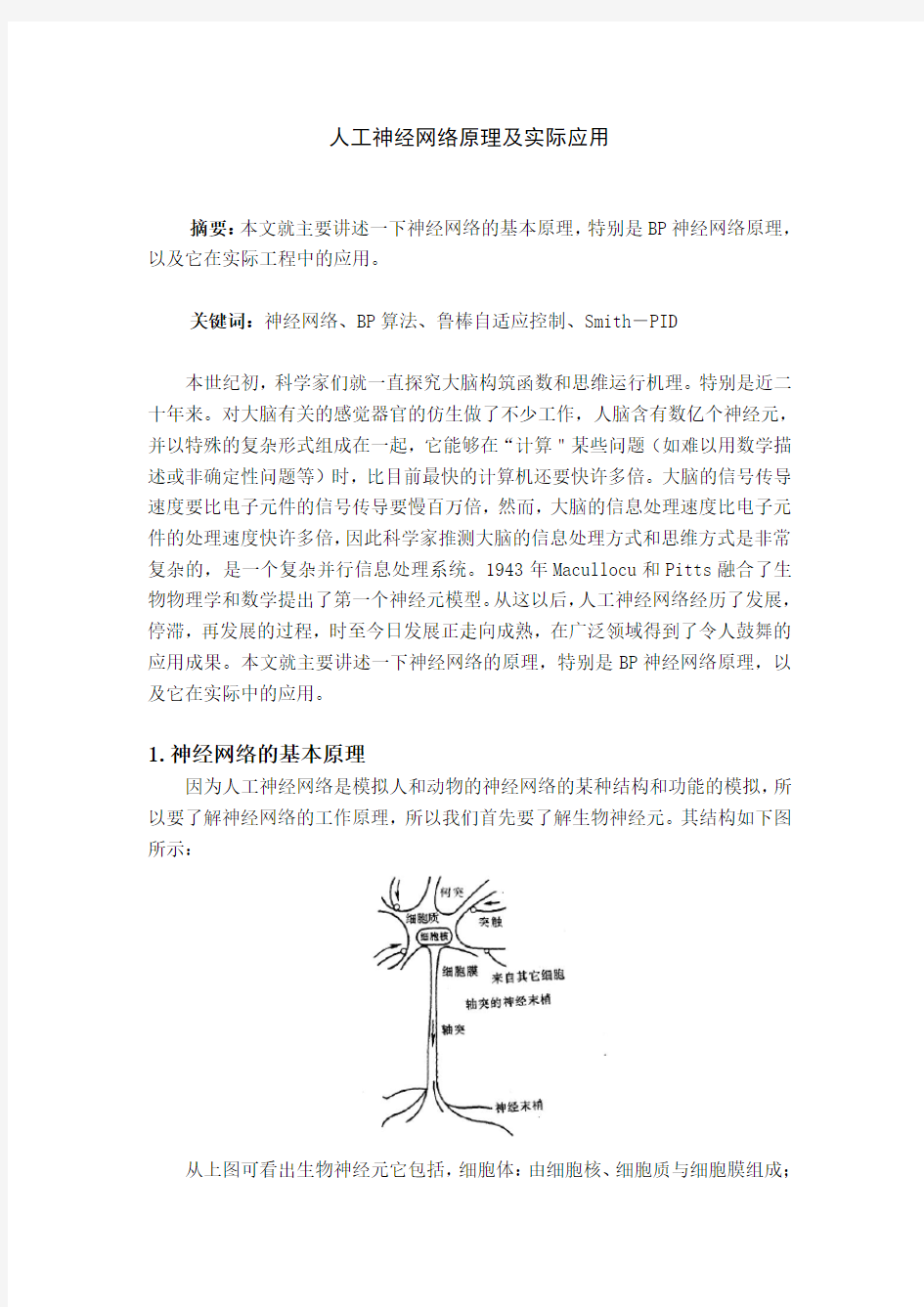
因为人工神经网络是模拟人和动物的神经网络的某种结构和功能的模拟,所以要了解神经网络的工作原理,所以我们首先要了解生物神经元。其结构如下图所示:
从上图可看出生物神经元它包括,细胞体:由细胞核、细胞质与细胞膜组成;
轴突:是从细胞体向外伸出的细长部分,也就是神经纤维。轴突是神经细胞的输出端,通过它向外传出神经冲动;树突:是细胞体向外伸出的许多较短的树枝状分支。它们是细胞的输入端,接受来自其它神经元的冲动;突触:神经元之间相互连接的地方,既是神经末梢与树突相接触的交界面。
对于从同一树突先后传入的神经冲动,以及同一时间从不同树突输入的神经冲动,神经细胞均可加以综合处理,处理的结果可使细胞膜电位升高;当膜电位升高到一阀值(约40mV),细胞进入兴奋状态,产生神经冲动,并由轴突输出神经冲动;当输入的冲动减小,综合处理的结果使膜电位下降,当下降到阀值时。细胞进入抑制状态,此时无神经冲动输出。“兴奋”和“抑制”,神经细胞必呈其一。
突触界面具有脉冲/电位信号转换功能,即类似于D/A转换功能。沿轴突和树突传递的是等幅、恒宽、编码的离散电脉冲信号。细胞中膜电位是连续的模拟量。
神经冲动信号的传导速度在1~150m/s之间,随纤维的粗细,髓鞘的有无而不同。
神经细胞的重要特点是具有学习功能并有遗忘和疲劳效应。总之,随着对生物神经元的深入研究,揭示出神经元不是简单的双稳逻辑元件而是微型生物信息处理机制和控制机。
而神经网络的基本原理也就是对生物神经元进行尽可能的模拟,当然,以目前的理论水平,制造水平,和应用水平,还与人脑神经网络的有着很大的差别,它只是对人脑神经网络有选择的,单一的,简化的构造和性能模拟,从而形成了不同功能的,多种类型的,不同层次的神经网络模型。
2.BP神经网络
目前,再这一基本原理上已发展了几十种神经网络,例如Hopficld模型,Feldmann等的连接型网络模型,Hinton等的玻尔茨曼机模型,以及Rumelhart 等的多层感知机模型和Kohonen的自组织网络模型等等。在这众多神经网络模型中,应用最广泛的是多层感知机神经网络。
这里我们重点的讲述一下BP神经网络。多层感知机神经网络的研究始于50年代,但一直进展不大。直到1985年,Rumelhart等人提出了误差反向传递学习算法(即BP算),实现了Minsky的多层网络设想,其网络模型如下图所示。它可以分为输入层,影层(也叫中间层),和输出层,其中中间层可以是一层,也可以多层,看实际情况而定。
BP 网络的原理是把一个输入矢量经过影层变换成输出矢量,实现从输入空间到输出空间的映射。由权重实现正向映射,利用当前权重作用下网络的输出与希望实现的映射要求的期望输出进行比较来学习的。为减少总误差,网络利用实际误差调整权重。BP 网络必须要求与输入相对应的希望输出构成训练模式队,因而需要指导学习,BP 网络在结构上具有对称性,网络中的每个输出处理元件基本具有相同的传递函数。
大致的工作原理就如上段所述,但要深入了解我们就先要了解一下BP 网络学习算法——反传学习算法(即BP 算法)。BP 算法不仅有输入层节点、输出层节点,还可有1个或多个隐含层节点。对于输入信号,要先向前传播到隐含层节点,经作用函数后,再把隐节点的输出信号传播到输出节点,最后给出输出结果。节点的作用的激励函数通常选取S 型函数,如
Q
x e x f /11)(-+=式中Q 为调整激励函数形式的Sigmoid 参数。该算法的学习过程由正向传播和反向传播组成。在正向传播过程中,输入信息从输入层经隐含层逐层处理,并传向输出层。每一层神经元的状态只影响下一层神经元的状态。如果输出层得不到期望的输出,则转入反向传播,将误差信号沿原来的连接通道返回,通过修改各层神经元的权值,使得误差信号最小。
社含有n 个节点的任意网络,各节点之特性为Sigmoid 型。为简便起见,指定网络只有一个输出y ,任一节点i 的输出为O i ,并设有N 个样本
(x k ,y k )(k =1,2,3,…,N ),对某一输入x k ,网络输出为y k 节点i 的输出为O ik ,节点j 的输入为
net jk =∑i ik
ij O W 并将误差函数定义为输入层影层输出层
图34-1BP 神经网络模型
∑=-=N k k k y y E 1
2)(21 其中k y 为网络实际输出,定义E k =(y k -?k )2,k jk jk E net δ?=?,且O jk =f (net jk ),于是ik jk k ij jk jk k ij k O E W E W E net net net ??=????=??=δjk O ik 当j 为输出节点时,O jk =?k )net ()(net jk k k jk k k k jk f y y y y E '--=????= δ(1)若j 不是输出节点,则有
∑∑∑∑∑∑=??=????=????=??'??=????=??=m i m
mj mk mj mk k m i
ik mi jk mk k m jk
mk mk k jk k jk jk
k jk jk jk k jk k jk W W E O W O E E E f O E O O E E δδnet net net )net (net net 因此
?????=??'=∑ik mk ij k m mj mk jk jk O E W f δδδ)net ((2)
如果有M 层,而第M 层仅含输出节点,第一层为输入节点,则BP 算法为:第一步,选取初始权值W 。
第二步,重复下述过程直至收敛:
a.a.对于k =1到N
a ).计算O ik ,net jk 和?k 的值(正向过程);
b ).对各层从M 到2反向计算(反向过程);
b.对同一节点j ∈M ,由式(1)和(2)计算δjk ;第三步,修正权值,1111ij E W W W μ?=-?,μ>0,其中N k k ij ij
E E W W ??=??∑。从上述BP 算法可以看出,BP 模型把一组样本的I/O 问题变为一个非线性优化问题,它使用的是优化中最普通的梯度下降法。如果把神经网络的看成输入到输出的映射,则这个映射是一个高度非线性映射。
设计一个神经网络专家系统重点在于模型的构成和学习算法的选择。一般来说,结构是根据所研究领域及要解决的问题确定的。通过对所研究问题的大量历史资料数据的分析及目前的神经网络理论发展水平,建立合适的模型,并针对
所选的模型采用相应的学习算法,在网络学习过程中,不断地调整网络参数,直到输出结果满足要求。
3.实际工程中的应用
以上就是BP 神经网络的的基本工作原理,下面我们就来看一下它在实际工程中的应用,在水电厂水质调节系统自适应控制中的应用。
随着我国火电厂高参数大容量机主的投产,对水汽品质和水质工况控制的要求越来越严格。控制策略是决定水质调节效果的关键。整个火电厂水质调节系统采用Smith-PID 自适应控制方案,具体控制模型我们就不予考虑,这里就具体BP 神经网络在这一方案中的应用。
由于系统采用PID 算法中由三种控制作用,即互相联系又互相制约,且并不是简单的线性组合,必须用非线性方法在线自适应调整PID 参数,才能保证时变对象的控制效果。所以在此系统采用BP 神经网络在线整定PID 参数。所以整个系统结构如下图所示:
基于BP 神经网络的Smith-PID 控制系统
PID参数BP网络整定方法
选择如下图所示4—5—3结构的BP网络,在线自学习整定系统Smith控制系统中控制器Gc(s)的PID 参数,以给定值r(t)、系统响应值y (t)、偏差e (t)和常数1作为BP 网络的输入,网络的输出为需要整定的PID 参数kp 、ki 和kd 。
PID 参数整定BP 网络结构
对于BP网络输入层,第j个神经元的输入为
(1)j j O x =(3)
对于BP网络的隐层,第i个神经元的状态为
(2)(2)(1)0()()()M i ij j j Net k w k O k ==∑(4)
对于第i个神经元的输出为
(2)2()(())i i O k f Net k =(5)
式(1)~式(3)中,j =1,2,…M;i =1,2,…N 。M、N 分别为输入层和隐层
神经元数;上角标(1),(2),(3)分别代表输入层、隐层和输出层。(2)ij w 为隐
层权值,()f 为隐层神经元的激发函数,文中取()tanh()x x
x x e e f x x e e ---==+,可以实现从输入到输出的任意非线性映射,且输出为连续量。
对于BP 网络输出层第p 个神经元的状态为
3(3)(2)0()()()N p pi i i Net k w k O k ==∑(6)
第p 个神经元的输出为
(3)(3)(())p p O g Net k =(7)
其中()g 为输出层神经元激发函数,p =1,2,…,L 。L 为输出层神经元数,文
中L=3,(3)1O 、(3)2O 、(3)3O 分别对应PID参数的p k 、i k 、d k ,即
(3)1()p O k k =、(3)2()i O k k =、(3)3()d O k k =(8)
由于PID 参数p k 、i k 、d k 取非负数,所以取max ()x
x x e g x u e e
-=+,其中max u 为S 函数的饱和值,根据实际情况选定。性能指标取二次型函数21()[()()]2
E k r k y k =-,按()E k 对权值的负梯度方向搜索调整,并附加使学习速度足够快且不易产生震荡的动量项,即得到按梯度法修改网络的权值
(3)(3)(3)()()(1)()ij pi pi E k w k w k w k ηα??=-+?-?(9)
上式中η为按梯度搜索的步长,亦即学习速率。α为动量因子,它取决于过去权值的变化对目前权值变化的影响程度。而
(3)(3)(3)(3)(3)(3)()()()()()()()()()()()()p p pi p p pi O k Net k E k E k y k u k w k y k u k O k Net k w k ??????=?????? (10)在式(8)中
2()1[(()())]()()()()()2
E k r k y k r k y k e k y k y k ??=-=-=??(11)()()y k u k ??由商差近似,即()()(1)()()(1)y k y k y k u k u k u k ?--≈?--(12)
3(3)(2)(2)(3)(3)()
[()()]()()
()p pi i i i pi pi Net k w k O k O k w k w k ??==??∑(13)
(3)(3)(3)(3)(3)()[(())][()]()()p p p p p O k g Net k g Net k Net k Net k ??'==??(14)同时,由系统结构原理和式(8),得
1()()(1)u k e k e k ?''=--?(15)(3)2()()()
u k e k O k ?'=?(16)(3)3()()2(1)(2)()u k e k e k e k O k ?'''=--+-?(17)从而得到BP 网络输出层权值得学习算法为
(3)(3)(3)(2)()(1)()()pi pi p i w k w k k O k αηδ?=?-+(18)其中(3)(3)(3)()()()()[()]()()
p p p y k u k k e k g Net k u k O k δ??'=?? (p=1,2…,L)(19)同理有隐层权值得学习算法
(2)(2)(2)1()(1)()()ij ij i j w k w k k O k αηδ?=?-+(20)其中
3(2)(2)(3)(3)1()(())()()i i p pi p k f Net k k w k δδ='=∑(i=1,2…,N)(21)
在这一系统中,BP神经网络进行适当得改善。常规BP 网络的缺陷是收敛速度慢和陷入局部极小,这将影响被整定的PID 参数对被控对象的跟踪性能。式(9)中增加附加动量项,使网络在修正其权值时,不仅考虑误差在梯度上的作用,而且考虑在误差曲面上变化趋势的影响,允许网络忽略网络上的微小变化特性,起到了防止网络陷入浅的局部极小的作用。然而,附加动量不应该是固定不变的,而应该考虑到当修正的权值在误差中导致太大的增长结果时,新的权值应被取消,同时动量作用停止下来,使网络不进入较大误差曲面;当新的误差变化率对其旧值超过一个事先设定的最大误差变化率时,也得取消所计算的权值变化。
学习速率η决定了网络每一次循环训练中所产生的权值变化量,大的学习速率可能导致系统的不稳定,而小的学习速率又使收敛太慢、训练时间太长。文中为了加速PID 参数的寻优,提高PID 参数整定对被控对象的跟踪性能,同时又
不至于导致振荡和发散,通过仿真研究,提出下列动量因子α和学习速率η在线自适应调整规则
0E(k)>1.05E(k-1)()0.95E(k)
将上述系统进行工程应用仿真,可以得到该系统具有很好得快速稳定性和准确性、很强得抗干扰性和鲁棒性。所以在该系统中,将BP神经网络和Smith 预估器组合成复合控制器的鲁棒控制策略,利用BP 网络的任意非线性逼近特性及很强的自学习能力,弥补了常规Smith 控制在解决模型不确定系统中的不足。该方法具有稳态精度高、过渡过程短、抗干扰性好、鲁棒性强,以及结构简单、适应性强、易于实时控制的特点,具有很高的应用价值。
从上述神经网络的基本原理,以及它在实际应用可知。神经网络从最初的概念和基础理论的提出到今天的全球性研究热热潮,已历经了近百年的历史,无论是历史研究,还是实践应用,都取得了令人瞩目得成果。由于科学技术迅猛发展,面对越来越多的各种复杂的多输入多输出的本质非线性的智能控制系统,科研人员对神经网络研究、应用情有独钟,必将投入大量的人力。物力、财力,在现代化生物学、微电子学、计算机科学的强有力的支撑下。神经网络理论的发展前景一定是十分辉煌。
当然、人工神经网络目前只是对生物神经系统的某种特定性能的简单模拟,设计规则也没有通用性,固有很大的发展前景。这就需要我们不断的去研究它.
参考资料:
1.刘军,常小军等神经网络原理及在控制中的应用青岛化工学院学报
1994年02期
2.张昆实,万家云等BP神经网络在湖泊水质评价中的应用研究长江大
学学报2004年Z1期
3.曹顺安,侯力等基于BP神经网络的火电厂水质调节系统的Smith_PID
自适应控制工业仪表与自动化装置2004年06期
4.康天增神经网络的原理及应用机电设备1996年05期
5.胡金滨,唐旭清人工神经网络的BP算法及其应用信息技术2004年4
期
6.张立明人工神经网络的模型及应用复旦大学出版社1993.7
7.阎平凡,黄端旭人工神经网络;模型·分析与应用安徽出版社1993.5
人工神经网络原理及实际应用
人工神经网络原理及实际应用 摘要:本文就主要讲述一下神经网络的基本原理,特别是BP神经网络原理,以及它在实际工程中的应用。 关键词:神经网络、BP算法、鲁棒自适应控制、Smith-PID 本世纪初,科学家们就一直探究大脑构筑函数和思维运行机理。特别是近二十年来。对大脑有关的感觉器官的仿生做了不少工作,人脑含有数亿个神经元,并以特殊的复杂形式组成在一起,它能够在“计算"某些问题(如难以用数学描述或非确定性问题等)时,比目前最快的计算机还要快许多倍。大脑的信号传导速度要比电子元件的信号传导要慢百万倍,然而,大脑的信息处理速度比电子元件的处理速度快许多倍,因此科学家推测大脑的信息处理方式和思维方式是非常复杂的,是一个复杂并行信息处理系统。1943年Macullocu和Pitts融合了生物物理学和数学提出了第一个神经元模型。从这以后,人工神经网络经历了发展,停滞,再发展的过程,时至今日发展正走向成熟,在广泛领域得到了令人鼓舞的应用成果。本文就主要讲述一下神经网络的原理,特别是BP神经网络原理,以及它在实际中的应用。 1.神经网络的基本原理 因为人工神经网络是模拟人和动物的神经网络的某种结构和功能的模拟,所以要了解神经网络的工作原理,所以我们首先要了解生物神经元。其结构如下图所示: 从上图可看出生物神经元它包括,细胞体:由细胞核、细胞质与细胞膜组成;
轴突:是从细胞体向外伸出的细长部分,也就是神经纤维。轴突是神经细胞的输出端,通过它向外传出神经冲动;树突:是细胞体向外伸出的许多较短的树枝状分支。它们是细胞的输入端,接受来自其它神经元的冲动;突触:神经元之间相互连接的地方,既是神经末梢与树突相接触的交界面。 对于从同一树突先后传入的神经冲动,以及同一时间从不同树突输入的神经冲动,神经细胞均可加以综合处理,处理的结果可使细胞膜电位升高;当膜电位升高到一阀值(约40mV),细胞进入兴奋状态,产生神经冲动,并由轴突输出神经冲动;当输入的冲动减小,综合处理的结果使膜电位下降,当下降到阀值时。细胞进入抑制状态,此时无神经冲动输出。“兴奋”和“抑制”,神经细胞必呈其一。 突触界面具有脉冲/电位信号转换功能,即类似于D/A转换功能。沿轴突和树突传递的是等幅、恒宽、编码的离散电脉冲信号。细胞中膜电位是连续的模拟量。 神经冲动信号的传导速度在1~150m/s之间,随纤维的粗细,髓鞘的有无而不同。 神经细胞的重要特点是具有学习功能并有遗忘和疲劳效应。总之,随着对生物神经元的深入研究,揭示出神经元不是简单的双稳逻辑元件而是微型生物信息处理机制和控制机。 而神经网络的基本原理也就是对生物神经元进行尽可能的模拟,当然,以目前的理论水平,制造水平,和应用水平,还与人脑神经网络的有着很大的差别,它只是对人脑神经网络有选择的,单一的,简化的构造和性能模拟,从而形成了不同功能的,多种类型的,不同层次的神经网络模型。 2.BP神经网络 目前,再这一基本原理上已发展了几十种神经网络,例如Hopficld模型,Feldmann等的连接型网络模型,Hinton等的玻尔茨曼机模型,以及Rumelhart 等的多层感知机模型和Kohonen的自组织网络模型等等。在这众多神经网络模型中,应用最广泛的是多层感知机神经网络。 这里我们重点的讲述一下BP神经网络。多层感知机神经网络的研究始于50年代,但一直进展不大。直到1985年,Rumelhart等人提出了误差反向传递学习算法(即BP算),实现了Minsky的多层网络设想,其网络模型如下图所示。它可以分为输入层,影层(也叫中间层),和输出层,其中中间层可以是一层,也可以多层,看实际情况而定。
人工神经网络复习题
《神经网络原理》 一、填空题 1、从系统的观点讲,人工神经元网络是由大量神经元通过极其丰富和完善的连接而构成的自适应、非线性、动力学系统。 2、神经网络的基本特性有拓扑性、学习性和稳定收敛性。 3、神经网络按结构可分为前馈网络和反馈网络,按性能可分为离散型和连续型,按学习方式可分为有导师和无导师。 4、神经网络研究的发展大致经过了四个阶段。 5、网络稳定性指从t=0时刻初态开始,到t时刻后v(t+△t)=v(t),(t>0),称网络稳定。 6、联想的形式有两种,它们分是自联想和异联想。 7、存储容量指网络稳定点的个数,提高存储容量的途径一是改进网络的拓扑结构,二是改进学习方法。 8、非稳定吸引子有两种状态,一是有限环状态,二是混沌状态。 9、神经元分兴奋性神经元和抑制性神经元。 10、汉明距离指两个向量中对应元素不同的个数。 二、简答题 1、人工神经元网络的特点? 答:(1)、信息分布存储和容错性。 (2)、大规模并行协同处理。 (3)、自学习、自组织和自适应。 (4)、人工神经元网络是大量的神经元的集体行为,表现为复杂
的非线性动力学特性。 (5)人式神经元网络具有不适合高精度计算、学习算法和网络设计没有统一标准等局限性。 2、单个神经元的动作特征有哪些? 答:单个神经元的动作特征有:(1)、空间相加性;(2)、时间相加性;(3)、阈值作用;(4)、不应期;(5)、可塑性;(6)疲劳。 3、怎样描述动力学系统? 答:对于离散时间系统,用一组一阶差分方程来描述: X(t+1)=F[X(t)]; 对于连续时间系统,用一阶微分方程来描述: dU(t)/dt=F[U(t)]。 4、F(x)与x 的关系如下图,试述它们分别有几个平衡状态,是否为稳定的平衡状态? 答:在图(1)中,有两个平衡状态a 、b ,其中,在a 点曲线斜率|F ’(X)|>1,为非稳定平稳状态;在b 点曲线斜率|F ’(X)|<1,为稳定平稳状态。 在图(2)中,有一个平稳状态a ,且在该点曲线斜率|F ’(X)|>1,为非稳定平稳状态。
人工神经网络的发展及应用
人工神经网络的发展与应用 神经网络发展 启蒙时期 启蒙时期开始于1980年美国著名心理学家W.James关于人脑结构与功能的研究,结束于1969年Minsky和Pape~发表的《感知器》(Perceptron)一书。早在1943年,心理学家McCulloch和数学家Pitts合作提出了形式神经元的数学模型(即M—P模型),该模型把神经细胞的动作描述为:1神经元的活动表现为兴奋或抑制的二值变化;2任何兴奋性突触有输入激励后,使神经元兴奋与神经元先前的动作状态无关;3任何抑制性突触有输入激励后,使神经元抑制;4突触的值不随时间改变;5突触从感知输入到传送出一个输出脉冲的延迟时问是0.5ms。可见,M—P模型是用逻辑的数学工具研究客观世界的事件在形式神经网络中的表述。现在来看M—P 模型尽管过于简单,而且其观点也并非完全正确,但是其理论有一定的贡献。因此,M—P模型被认为开创了神经科学理论研究的新时代。1949年,心理学家D.0.Hebb 提出了神经元之间突触联系强度可变的假设,并据此提出神经元的学习规则——Hebb规则,为神经网络的学习算法奠定了基础。1957年,计算机学家FrankRosenblatt提出了一种具有三层网络特性的神经网络结构,称为“感知器”(Perceptron),它是由阈值性神经元组成,试图模拟动物和人脑的感知学习能力,Rosenblatt认为信息被包含在相互连接或联合之中,而不是反映在拓扑结构的表示法中;另外,对于如何存储影响认知和行为的信息问题,他认为,存储的信息在神经网络系统内开始形成新的连接或传递链路后,新 的刺激将会通过这些新建立的链路自动地激活适当的响应部分,而不是要求任何识别或坚定他们的过程。1962年Widrow提出了自适应线性元件(Ada—line),它是连续取值的线性网络,主要用于自适应信号处理和自适应控制。 低潮期 人工智能的创始人之一Minkey和pape~经过数年研究,对以感知器为代表的网络系统的功能及其局限性从数学上做了深入的研究,于1969年出版了很有影响的《Perceptron)一书,该书提出了感知器不可能实现复杂的逻辑函数,这对当时的人工神经网络研究产生了极大的负面影响,从而使神经网络研究处于低潮时期。引起低潮的更重要的原因是:20世纪7O年代以来集成电路和微电子技术的迅猛发展,使传统的冯·诺伊曼型计算机进入发展的全盛时期,因此暂时掩盖了发展新型计算机和寻求新的神经网络的必要性和迫切性。但是在此时期,波士顿大学的S.Grossberg教授和赫尔辛基大学的Koho—nen教授,仍致力于神经网络的研究,分别提出了自适应共振理论(Adaptive Resonance Theory)和自组织特征映射模型(SOM)。以上开创性的研究成果和工作虽然未能引起当时人们的普遍重视,但其科学价值却不可磨灭,它们为神经网络的进一步发展奠定了基础。 复兴时期 20世纪80年代以来,由于以逻辑推理为基础的人工智能理论和冯·诺伊曼型计算机在处理诸如视觉、听觉、联想记忆等智能信息处理问题上受到挫折,促使人们
人工神经网络
人工神经网络(ANN)又称神经网络,是在现代神经科学研究成果的基础上,对生物神经系统的结构和功能进行数学抽象、简化和模仿而逐步发展起来的一种新型信息处理和计算系统。由于人工神经网络具有自学习、高容错、高度非线性描述能力等优点,现已广泛应用于经济、机器人和自动控制、军事、医疗、化学等领域[l ~ 3],并取得了许多成果。本文简要介绍人工神经网络的原理和特点,论述人工神经网络在高分子科学与工程领域的应用。 橡胶配方是决定橡胶制品性能的关键因素,由于材料配方与制品性能之间存在很复杂的非线性关系,多数情况下无法建立完整精确的理论模型,只能借助于回归方法得到经验公式。 传统的回归方法存在以下局限性: (1)使用不同的回9j方法可获得不同的经验公式,导致经验公式的繁多和不一致; (2)当配方项目及性能指标项目较多时,采用回归公式无法完全再现实验数据; (3)当实验进一步完善,实验数据增多的时候.其他人员再进行回归时,如果无法找到原来的回归方法、程序和实验数据,原来的回归公式将不能被利用,造成一定的浪费。随着计箅机的发展而出现的人工神经网络是人工智能方法.它不像回归方法那样,需预先给定基本函数,而是以实验数据为基础.经过有限次的迭代计算而获得的一个反映实验数据内在联系的数学模型,具有极强的非线性处理、自组织调整、自适应学习及容错抗噪能力,特别适用于研究像材料配方与制品性能之间关系的复杂非线性系统特性【¨】。因此,人们开始将人工神经网络应用于橡胶配方设计”J。 随着橡胶制品在各领域应用的拓展,橡胶配方设计变得越来越重要。人们进行橡胶配方设计主要有3个目的:提高制品的性能;改善加工工艺;降低生产成本。传统的橡胶配方设计方法有全因素设计、正交试验设计n_3]、均匀设计[4‘60等,而这些配方设计试验数据的处理方法无外乎方差分析和回归分析口]。由于材料的配方和性能之问存在非常复杂的非线性关系,回归分析只适合于单目标优化数据处理的模型,对于不同的性能,需要建立不同的模型,因此将其应用于配方设计有一定的局限性。近年来,发展日趋成熟的人工神经网络技术,尤其是BP神经网络凭借其结构简单、收敛速度快、预测精度高等优势越来越多地应用到橡胶配方设计试验中。 1橡胶配方设计 1.1橡胶配方设计概述 配方设计¨J是橡胶工业中的首要技术问题,在橡胶工业中占有重要地位。所谓配方设计,就是根据产品的性能要求和工艺条件,通过试验、优化、鉴定,合理地选用原材料,确定各种原材料的用量配比关系。 橡胶配方人员的主要工作就是要确定一系列变量对橡胶各项性能的定量或定性影响。变量可以是硫化剂、促进剂、填充剂、防老剂等,也可以是加工:[艺条件(如硫化温度、硫化时间等),总之是配方人员可能控制或测得的变量。橡胶各项基本性能包括拉伸强度、撕裂强度、硬度、定伸应力等物理机械性能,以 及加工性能、光洁度、外观等。 橡胶配方设计常常是多变量的试验设计,配方设计理论和试验设计方法对于 配方设计具有重要意义。
《人工神经网络原理与应用》试题
1 / 1 《人工神经网络原理与应用》试题 试论述神经网络的典型结构,常用的作用函数以及各类神经网络的基本作用,举例说明拟定结论。 试论述BP 算法的基本思想,讨论BP 基本算法的优缺点,以及改进算法的思路和方法。以BP 网络求解XOR 问题为例,说明BP 网络隐含层单元个数与收敛速度,计算时间之间的关系。要求给出计算结果的比较表格,以及相应的计算程序(.m 或者.c )试论述神经网络系统建模的几种基本方法。利用BP 网络对以下非线性系统进行辨识。 非线性系统 )(5.1) 1()(1)1()()1(22k u k y k y k y k y k y +-++-=+ 首先利用[-1,1]区间的随机信号u(k),样本点500,输入到上述系统,产生y(k), 用于训练BP 网络;网络测试,利用u(k)=sin(2*pi*k/10)+1/5*sin(2*pi*k/100),测试点300~500,输入到上述系统,产生y(k),检验BP 网络建模效果要求给出程序流程,matlab 程序否则c 程序,训练样本输入输出图形,检验结果的输入输出曲线。 试列举神经网络PID 控制器的几种基本形式,给出相应的原理框图。 试论述连续Hopfield 网络的工作原理,讨论网络状态变化稳定的条件。 谈谈学习神经网络课程后的心得体会,你准备如何在你的硕士(博士)课题中应用神经网络理论和知识解决问题(给出一到两个例)。《人工神经网络原理与应用》试题 试论述神经网络的典型结构,常用的作用函数以及各类神经网络的基本作用,举例说明拟定结论。 试论述BP 算法的基本思想,讨论BP 基本算法的优缺点,以及改进算法的思路和方法。以BP 网络求解XOR 问题为例,说明BP 网络隐含层单元个数与收敛速度,计算时间之间的关系。要求给出计算结果的比较表格,以及相应的计算程序(.m 或者.c )试论述神经网络系统建模的几种基本方法。利用BP 网络对以下非线性系统进行辨识。 非线性系统 )(5.1) 1()(1)1()()1(22k u k y k y k y k y k y +-++-=+ 首先利用[-1,1]区间的随机信号u(k), 样本点500,输入到上述系统,产生y(k), 用于训练BP 网络;网络测试,利用u(k)=sin(2*pi*k/10)+1/5*sin(2*pi*k/100),测试点300~500,输入到上述系统,产生y(k),检验BP 网络建模效果要求给出程序流程,matlab 程序否则c 程序,训练样本输入输出图形,检验结果的输入输出曲线。 试列举神经网络PID 控制器的几种基本形式,给出相应的原理框图。 试论述连续Hopfield 网络的工作原理,讨论网络状态变化稳定的条件。 谈谈学习神经网络课程后的心得体会,你准备如何在你的硕士(博士)课题中应用神经网络理论和知识解决问题(给出一到两个例)。
人工神经网络概论
人工神经网络概论 梁飞 (中国矿业大学计算机科学与技术学院信科09-1班,江苏,徐州,221116) 摘要:进入21世纪以来,神经网络近来越来越受到人们的关注,因为神经网络可以很容易的解决具有上百个参数的问题,它为大复杂度问题提供了解决一种相对来说比较有效的简单方法。人工神经网络是涉及神经科学、思维科学、人工智能、计算机科学等多个领域的交叉学科。本文简要介绍了人工神经网络的工作原理、属性、特点和优缺点、网络模型、发展历史及它的应用和发展前景等。 关键词:人工神经网络;人工智能;神经网络;神经系统 1.人工神经网络的简介 人工神经网络(Artificial Neural Networks,简写为 ANN),一种模仿动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的。人工神经网络具有自学习和自适应的能力,可以通过预先提供的一批相互对应的输入-输出数据,分析掌握两者之间潜在的规律,最终根据这些规律,用新的输入数据来推算输出结果,这种学习分析的过程被称为“训练”。 2.人工神经网络的工作原理 人脑的处理机制极其复杂,从结构上看它是包含有140亿神经细胞的大规模网络。单个神经细胞的工作速度并不高,但它通过超并行处理使得整个系统实现处理的高速性和表现的多样性。 因此,从处理的角度对人脑进行研究,并由此研制出一种象人脑一样能够“思维”的智能计算机和智能处理方法,一直是人工智能追求的目标。 人脑神经系统的基本构造单元是神经细胞,也称神经元。它和人体中其他细胞的关键区别在于具有产生、处理和传递信号的功能。每个神经元都包括三个主要部分:细胞体、树突和轴突。树突的作用是向四方收集由其他神经细胞传来的信息,轴突的功能是传出从细胞体送来的信息。每个神经细胞所产生和传递的基本信息是兴奋或抑制。在两个神经细胞之间的相互接触点称为突触。从信息的传递过程来看,一个神经细胞的树突,在突触处从其他神经细胞接受信号。这些信号可能是兴奋性的,也可能是抑制性的。所有树突接受到的信号都传到细胞体进行综合处理,如果在一个时间间隔内,某一细胞接受到的兴奋性信号量足够大,以致于使该细胞被激活,而产生一个脉冲信号。这个信号将沿着该细胞的轴突传送出去,并通过突触传给其他神经细胞.神经细胞通过突触的联接形成神经网络。
人工神经网络题库
人工神经网络 系别:计算机工程系 班级: 1120543 班 学号: 13 号 姓名: 日期:2014年10月23日
人工神经网络 摘要:人工神经网络是一种应用类似于大脑神经突触联接的结构进行信息处理的数学模型。在工程与学术界也常直接简称为神经网络或类神经网络。神经网络是一种运算模型,由大量的节点(或称神经元)之间相互联接构成,由大量处理单元互联组成的非线性、自适应信息处理系统。它是在现代神经科学研究成果的基础上提出的,试图通过模拟大脑神经网络处理、记忆信息的方式进行信息处理。 关键词:神经元;神经网络;人工神经网络;智能; 引言 人工神经网络的构筑理念是受到生物(人或其他动物)神经网络功能的运作启发而产生的。人工神经网络通常是通过一个基于数学统计学类型的学习方法(Learning Method )得以优化,所以人工神经网络也是数学统计学方法的一种实际应用,通过统计学的标准数学方法我们能够得到大量的可以用函数来表达的局部结构空间,另一方面在人工智能学的人工感知领域,我们通过数学统计学的应用可以来做人工感知方面的决定问题(也就是说通过统计学的方法,人工神经网络能够类似人一样具有简单的决定能力和简单的判断能力),这种方法比起正式的逻辑学推理演算更具有优势。 一、人工神经网络的基本原理 1-1神经细胞以及人工神经元的组成 神经系统的基本构造单元是神经细胞,也称神经元。它和人体中其他细胞的关键区别在于具有产生、处理和传递信号的功能。每个神经元都包括三个主要部分:细胞体、树突和轴突。树突的作用是向四方收集由其他神经细胞传来的信息,轴突的功能是传出从细胞体送来的信息。每个神经细胞所产生和传递的基本信息是兴奋或抑制。在两个神经细胞之间的相互接触点称为突触。简单神经元网络及其简化结构如图2-2所示。 从信息的传递过程来看,一个神经细胞的树突,在突触处从其他神经细胞接受信号。 这些信号可能是兴奋性的,也可能是抑制性的。所有树突接受到的信号都传到细胞体进行综合处理,如果在一个时间间隔内,某一细胞接受到的兴奋性信号量足够大,以致于使该细胞被激活,而产生一个脉冲信号。这个信号将沿着该细胞的轴突传送出去,并通过突触传给其他神经细胞.神经细胞通过突触的联接形成神经网络。 图1-1简单神经元网络及其简化结构图 (1)细胞体 (2)树突 (3)轴突 (4)突触
人工神经网络大作业
X X X X大学 研究生考查课 作业 课程名称:智能控制理论与技术 研究生姓名:学号: 作业成绩: 任课教师(签名) 交作业日时间:2010年12月22日
人工神经网络(artificial neural network,简称ANN)是在对大脑的生理研究的基础上,用模拟生物神经元的某些基本功能元件(即人工神经元),按各种不同的联结方式组成的一个网络。模拟大脑的某些机制,实现某个方面的功能,可以用在模仿视觉、函数逼近、模式识别、分类和数据压缩等领域,是近年来人工智能计算的一个重要学科分支。 人工神经网络用相互联结的计算单元网络来描述体系。输人与输出的关系由联结权重和计算单元来反映,每个计算单元综合加权输人,通过激活函数作用产生输出,主要的激活函数是Sigmoid函数。ANN有中间单元的多层前向和反馈网络。从一系列给定数据得到模型化结果是ANN的一个重要特点,而模型化是选择网络权重实现的,因此选用合适的学习训练样本、优化网络结构、采用适当的学习训练方法就能得到包含学习训练样本范围的输人和输出的关系。如果用于学习训练的样本不能充分反映体系的特性,用ANN也不能很好描述与预测体系。显然,选用合适的学习训练样本、优化网络结构、采用适当的学习训练方法是ANN的重要研究内容之一,而寻求应用合适的激活函数也是ANN研究发展的重要内容。由于人工神经网络具有很强的非线性多变量数据的能力,已经在多组分非线性标定与预报中展现出诱人的前景。人工神经网络在工程领域中的应用前景越来越宽广。 1人工神经网络基本理论[1] 1.1神经生物学基础 可以简略地认为生物神经系统是以神经元为信号处理单元,通过广泛的突触联系形成的信息处理集团,其物质结构基础和功能单元是脑神经细胞即神经元(neu ron)。(1)神经元具有信号的输入、整合、输出三种主要功能作用行为。突触是整个神经系统各单元间信号传递驿站,它构成各神经元之间广泛的联接。(3)大脑皮质的神经元联接模式是生物体的遗传性与突触联接强度可塑性相互作用的产物,其变化是先天遗传信息确定的总框架下有限的自组织过程。 1.2建模方法 神经元的数量早在胎儿时期就已固定,后天的脑生长主要是指树突和轴突从神经细胞体中长出并形成突触联系,这就是一般人工神经网络建模方法的生物学依据。人脑建模一般可有两种方法:①神经生物学模型方法,即根据微观神经生物学知识的积累,把脑神经系统的结构及机理逐步解释清楚,在此基础上建立脑功能模型。②神经计算模型方法,即首先建立粗略近似的数学模型并研究该模型的动力学特性,然后再与真实对象作比较(仿真处理方法)。 1.3概念 人工神经网络用物理可实现系统来模仿人脑神经系统的结构和功能,是一门新兴的前沿交叉学科,其概念以T.Kohonen.Pr的论述最具代表性:人工神经网络就是由简单的处理单元(通常为适应性)组成的并行互联网络,它的组织能够模拟生物神经系统对真实世界物体所作出的交互反应。 1.4应用领域 人工神经网络在复杂类模式识别、运动控制、感知觉模拟方面有着不可替代的作用。概括地说人工神经网络主要应用于解决下述几类问题:模式信息处理和模式识别、最优化问题、信息的智能化处理、复杂控制、信号处理、数学逼近映射、感知觉模拟、概率密度函数估计、化学谱图分析、联想记忆及数据恢复等。 1.5理论局限性 (1)受限于脑科学的已有研究成果由于生理试验的困难性,目前对于人脑思维与记忆机制的认识尚很肤浅,对脑神经网的运行和神经细胞的内部处理机制还没有太多的认识。 (2)尚未建立起完整成熟的理论体系目前已提出的众多人工神经网络模型,归纳起来一般都是一个由节点及其互连构成的有向拓扑网,节点间互连强度构成的矩阵可通过某种学
人工神经网络大作业
X X X X 大学 研究生考查课 作业 课程名称:智能控制理论与技术 研究生姓名:学号: 作业成绩: 任课教师(签名) 交作业日时间:2010 年12 月22 日
人工神经网络(artificial neural network,简称ANN)是在对大脑的生理研究的基础上,用模拟生物神经元的某些基本功能元件(即人工神经元),按各种不同的联结方式组成的一个网络。模拟大脑的某些机制,实现某个方面的功能,可以用在模仿视觉、函数逼近、模式识别、分类和数据压缩等领域,是近年来人工智能计算的一个重要学科分支。 人工神经网络用相互联结的计算单元网络来描述体系。输人与输出的关系由联结权重和计算单元来反映,每个计算单元综合加权输人,通过激活函数作用产生输出,主要的激活函数是Sigmoid函数。ANN有中间单元的多层前向和反馈网络。从一系列给定数据得到模型化结果是ANN的一个重要特点,而模型化是选择网络权重实现的,因此选用合适的学习训练样本、优化网络结构、采用适当的学习训练方法就能得到包含学习训练样本范围的输人和输出的关系。如果用于学习训练的样本不能充分反映体系的特性,用ANN也不能很好描述与预测体系。显然,选用合适的学习训练样本、优化网络结构、采用适当的学习训练方法是ANN的重要研究内容之一,而寻求应用合适的激活函数也是ANN研究发展的重要内容。由于人工神经网络具有很强的非线性多变量数据的能力,已经在多组分非线性标定与预报中展现出诱人的前景。人工神经网络在工程领域中的应用前景越来越宽广。 1人工神经网络基本理论[1] 1. 1神经生物学基础 可以简略地认为生物神经系统是以神经元为信号处理单元, 通过广泛的突触联系形成的信息处理集团, 其物质结构基础和功能单元是脑神经细胞即神经元(neu ron)。(1) 神经元具有信号的输入、整合、输出三种主要功能作用行为。突触是整个神经系统各单元间信号传递驿站, 它构成各神经元之间广泛的联接。(3) 大脑皮质的神经元联接模式是生物体的遗传性与突触联接强度可塑性相互作用的产物, 其变化是先天遗传信息确定的总框架下有限的自组织过程。 1. 2建模方法 神经元的数量早在胎儿时期就已固定,后天的脑生长主要是指树突和轴突从神经细胞体中长出并形成突触联系, 这就是一般人工神经网络建模方法的生物学依据。人脑建模一般可有两种方法: ①神经生物学模型方法, 即根据微观神经生物学知识的积累, 把脑神经系统的结构及机理逐步解释清楚, 在此基础上建立脑功能模型。②神经计算模型方法, 即首先建立粗略近似的数学模型并研究该模型的动力学特性, 然后再与真实对象作比较(仿真处理方法)。 1. 3概念 人工神经网络用物理可实现系统来模仿人脑神经系统的结构和功能, 是一门新兴的前沿交叉学科, 其概念以T.Kohonen. Pr 的论述最具代表性: 人工神经网络就是由简单的处理单元(通常为适应性) 组成的并行互联网络, 它的组织能够模拟生物神经系统对真实世界物体所作出的交互反应。 1. 4应用领域 人工神经网络在复杂类模式识别、运动控制、感知觉模拟方面有着不可替代的作用。概括地说人工神经网络主要应用于解决下述几类问题: 模式信息处理和模式识别、最优化问题、信息的智能化处理、复杂控制、信号处理、数学逼近映射、感知觉模拟、概率密度函数估计、化学谱图分析、联想记忆及数据恢复等。 1. 5理论局限性 (1) 受限于脑科学的已有研究成果由于生理试验的困难性, 目前对于人脑思维与记忆机制的认识尚很肤浅, 对脑神经网的运行和神经细胞的内部处理机制还没有太多的认识。 (2) 尚未建立起完整成熟的理论体系目前已提出的众多人工神经网络模型,归纳起来一般都是一个由节点及其互连构成的有向拓扑网, 节点间互连强度构成的矩阵可通过某种学
人工神经网络的发展及应用
人工神经网络的发展及应用 西安邮电学院电信系樊宏西北电力设计院王勇日期:2005 1-21 1 人工神经网络的发展 1.1 人工神经网络基本理论 1.1.1 神经生物学基础生物神经系统可以简略地认为是以神经元为信号的处理单元,通过广泛的突触联系形成的信息处理集团,其物质结构基础和功能单元是脑神经细胞,即神经元(neuron) 。 (1)神经元具有信号的输人、整合、输出三种主要功能作用行为,结构如图1 所示: (2)突触是整个神经系统各单元间信号传递驿站,它构成各神经元之间广泛的联接。 (3)大脑皮质的神经元联接模式是生物体的遗传性与突触联接强度可塑性相互作用的产物,其变化是先天遗传信息确定的总框架下有限的自组织过程。 1.1.2 建模方法神经元的数量早在胎儿时期就已固定,后天的脑生长主要是指树突和轴突从神经细胞体中长出并形成突触联系,这就是一般人工神经网络建模方法的生物学依据。人脑建模一般可有两种方法:①神经生物学模型方法,即根据微观神经生物学知识的积累,把脑神经系统的结构及机理逐步解释清楚,在此基础上建立脑功能模型;②神 经计算模型方法,即首先建立粗略近似的数学模型并研究该模型的动力学特性,然后冉与真实对象作比较(仿真处理方法)。1.1.3 概
念人工神经网络用物理町实现系统采模仿人脑神经系统的结构和功能,是一门新兴的前沿交义学科,其概念以T.Kohonen.Pr 的论述 最具代表性:人工神经网络就是由简单的处理单元(通常为适应性神经元,模型见图2)组成的并行互联网络,它的组织能够模拟生物神 经系统对真实世界物体所作出的交互反应。 1.2 人工神经网络的发展 人工神经网络的研究始于40 年代初。半个世纪以来,经历了兴起、高潮与萧条、高潮及稳步发展的较为曲折的道路。1943 年,心理学家W.S.Mcculloch 和数理逻辑学家W.Pitts 提出了M—P 模型, 这是第一个用数理语言描述脑的信息处理过程的模型,虽然神经元的功能比较弱,但它为以后的研究工作提供了依据。1949 年,心理学家D. O. Hebb提出突触联系可变的假设,根据这一假设提出的学习规律为神经网络的学习算法奠定了基础。1957 年,计算机科学家Rosenblatt 提出了著名的感知机模型,它的模型包含了现代计算机的一些原理,是第一个完整的人工神经网络。1969 年,美国著名人工智能学者M.Minsky 和S.Papert 编写了影响很大的Perceptron 一书,从理论上证明单层感知机的能力有限,诸如不能解决异或问题,而且他们推测多层网络的感知能也不过如此,在这之后近10 年,神经网络研究进入了一个缓慢发展的萧条期。美国生物物理学家J.J.Hopfield 于1982年、1984 年在美国科学院院刊发表的两篇文章,有力地推动了神经网络的研究,引起了研究神经网络的
神经网络基本概念
二.神经网络控制 §2.1 神经网络基本概念 一. 生物神经元模型:<1>P7 生物神经元,也称作神经细胞,是构成神经系统的基本功能单元。虽然神经元的形态有极大差异,但基本结构相似。本目从信息处理和生物控制的角度,简述其结构和功能。 1.神经元结构 神经元结构如图2-1所示 图2-1
1) 细胞体:由细胞核、细胞质和细胞膜等组成。 2) 树突:胞体上短而多分支的突起,相当于神经元的输入端,接收传入的神经冲 动。 3) 轴突:胞体上最长枝的突起,也称神经纤维。端部有很多神经末梢,传出神经 冲动。 4) 突触:是神经元之间的连接接口,每一个神经元约有104~106 个突触,前一个 神经元的轴突末梢称为突触的前膜,而后一个神经元的树突称为突触的后膜。一个神经元通过其轴突的神经末梢经突触,与另一个神经元的树突连接,以实现信息传递。由于突触的信息传递是特性可变的,随着神经冲动传递方式的变化,传递作用强弱不同,形成了神经元之间连接的柔性,称为结构的可塑性。 5) 细胞膜电位:神经细胞在受到电的、化学的、机械的刺激后能产生兴奋,此时细胞膜内外由电位差,称为膜电位。其电位膜内为正,膜外为负。 2. 神经元功能 1) 兴奋与抑制:传入神经元的冲动经整和后使细胞膜电位提高,超过动作电 位的阈值时即为兴奋状态,产生神经冲动,由轴突经神经末梢传出。传入神经元的冲动经整和后使细胞膜电位降低,低于阈值时即为抑制状态,不产生神经冲动。 2) 学习与遗忘:由于神经元结构的可塑性,突触的传递作用可增强与减弱, 因此神经元具有学习与遗忘的功能。 二.人工神经元模型 ,<2>P96 人工神经元是对生物神经元的一种模拟与简化。它是神经网络的基本处理单元。图2-2显示了一种简化的人工神经元结构。它是一个多输入单输出的非线形元件。 图2-2 其输入、输出的关系可描述为 =-= n j i j ji i Q X W I 1 2-1 )I (f y i i = 其中i X (j=1、2、……、n)是从其他神经元传来的输入信号;
人工神经网络综述
人工神经网络综述 摘要:人工神经网络是属于人工智能的一个组成部分,它的提出是基于现代神经科学的相关研究,并且在诸多领域得到了广泛的应用,为人工智能化的发展提供了强大的动力。首先论述了人工神经网络的发展历程,并介绍了几种常见的模型及应用现状,最后总结了当前存在的问题及发展方向。 关键词:神经网络、分类、应用 0引言 多年以来,科学家们不断从医学、生物学、生理学、哲学、信息学、计算机科学、认知学、组织协同学等各个角度探索人脑工作的秘密,希望能制作模拟人脑的人工神经元。特别是近二十年来。对大脑有关的感觉器官的仿生做了不少工作,人脑含有数亿个神经元,并以特殊的复杂形式组成在一起,它能够在计算某些问题(如难以用数学描述或非确定性问题等)时,比目前最快的计算机还要快许多倍。大脑的信号传导速度要比电子元件的信号传导要慢百万倍,然而,大脑的信息处理速度比电子元件的处理速度快许多倍,因此科学家推测大脑的信息处理方式和思维方式是非常复杂的,是一个复杂并行信息处理系统。在研究过程中,近年来逐渐形成了一个新兴的多学科交叉技术领域,称之为“人工神经网络”。神经网络的研究涉及众多学科领域,这些领域互相结合、相互渗透并相互推动。 1人工神经网络概述 1.1人工神经网络的发展 人工神经网络是20世纪80年代以来人工智能领域中兴起的研究热点,因其具有独特的结构和处理信息的方法,使其在许多实际应用中取得了显著成效。 1.1.1人工神经网络发展初期 1943年美国科学家家Pitts和MeCulloch从人脑信息处理观点出发,采用数理模型的方法研究了脑细胞的动作和结构及其生物神经元的一些基本生理特性,他们提出了第一个神经计算模型,即神经元的阈值元件模型,简称MP模型,这是人类最早对于人脑功能的模仿。他们主要贡献在于结点的并行计算能力很强,为计算神经行为的某此方面提供了可能性,从而开创了神经网络的研究。1958年Frank Rosenblatt提出了感知模型(Pereeptron),用来进行分类,并首次把神经网络的研究付诸于工程实践。1960年Bernard Widrow等提出自适应线形元件ADACINE网络模型,用于信号处理中的自适应滤波、预测和模型识别。 1.1.2人工神经网络低谷时期
人工神经网络及其应用实例_毕业论文
人工神经网络及其应用实例人工神经网络是在现代神经科学研究成果基础上提出的一种抽 象数学模型,它以某种简化、抽象和模拟的方式,反映了大脑功能的 若干基本特征,但并非其逼真的描写。 人工神经网络可概括定义为:由大量简单元件广泛互连而成的复 杂网络系统。所谓简单元件,即人工神经元,是指它可用电子元件、 光学元件等模拟,仅起简单的输入输出变换y = σ (x)的作用。下图是 3 中常用的元件类型: 线性元件:y = 0.3x,可用线性代数法分析,但是功能有限,现在已不太常用。 2 1.5 1 0.5 -0.5 -1 -1.5 -2 -6 -4 -2 0 2 4 6 连续型非线性元件:y = tanh(x),便于解析性计算及器件模拟,是当前研究的主要元件之一。
离散型非线性元件: y = ? 2 1.5 1 0.5 0 -0.5 -1 -1.5 -2 -6 -4 -2 2 4 6 ?1, x ≥ 0 ?-1, x < 0 ,便于理论分析及阈值逻辑器件 实现,也是当前研究的主要元件之一。 2 1.5 1 0.5 0 -0.5 -1 -1.5 -2 -6 -4 -2 2 4 6
每一神经元有许多输入、输出键,各神经元之间以连接键(又称 突触)相连,它决定神经元之间的连接强度(突触强度)和性质(兴 奋或抑制),即决定神经元间相互作用的强弱和正负,共有三种类型: 兴奋型连接、抑制型连接、无连接。这样,N个神经元(一般N很大)构成一个相互影响的复杂网络系统,通过调整网络参数,可使人工神 经网络具有所需要的特定功能,即学习、训练或自组织过程。一个简 单的人工神经网络结构图如下所示: 上图中,左侧为输入层(输入层的神经元个数由输入的维度决定),右侧为输出层(输出层的神经元个数由输出的维度决定),输入层与 输出层之间即为隐层。 输入层节点上的神经元接收外部环境的输入模式,并由它传递给 相连隐层上的各个神经元。隐层是神经元网络的内部处理层,这些神 经元在网络内部构成中间层,不直接与外部输入、输出打交道。人工 神经网络所具有的模式变换能力主要体现在隐层的神经元上。输出层 用于产生神经网络的输出模式。 多层神经网络结构中有代表性的有前向网络(BP网络)模型、
人工神经网络复习资料题
《神经网络原理》 、填空题 1、从系统的观点讲,人工神经元网络是由大量神经元通过极其丰富和完善的连接而构成的自适应、非线性、动力学系统。 2、神经网络的基本特性有拓扑性、学习性和稳定收敛性。 3、神经网络按结构可分为前馈网络和反馈网络,按性能可分为 离散型和连续型,按学习方式可分为有导师和无导师。 4、神经网络研究的发展大致经过了四个阶段。 5、网络稳定性指从t=0时刻初态开始,到t时刻后v(t+ △)=▼(◎,(t>0),称网络稳定。 6、联想的形式有两种,它们分是自联想和异联想。 7、存储容量指网络稳定点的个数,提高存储容量的途径一是改—进网络的拓扑结构,二是改进学习方法。 8、非稳定吸引子有两种状态,一是有限环状态,二是混沌状态。 9、神经元分兴奋性神经元和抑制性神经元。 10、汉明距离指两个向量中对应元素不同的个数。 二、简答题 1、人工神经元网络的特点? 答:(1 )、信息分布存储和容错性。 (2 )、大规模并行协同处理。 (3)、自学习、自组织和自适应。
(4)、人工神经元网络是大量的神经元的集体行为,表现为复杂
的非线性动力学特性。 (5)人式神经元网络具有不适合高精度计算、学习算法和网络 设计没有统一标准等局限性。 2、单个神经元的动作特征有哪些? 答:单个神经元的动作特征有:(1 )、空间相加性;(2 )、时间相加性;(3)、阈值作用;(4 )、不应期;(5 )、可塑性;(6)疲劳。 3、怎样描述动力学系统? 答:对于离散时间系统,用一组一阶差分方程来描述: X(t+1)=F[X(t)]; 对于连续时间系统,用一阶微分方程来描述: dU(t)/dt=F[U(t)]。 4、F(x)与x的关系如下图,试述它们分别有几个平衡状态,是 否为稳定的平衡状态? 答:在图(1、中,有两个平衡状态a、b,其中,在a点曲线斜率|F' (X)|>1 ,为非稳定平稳状态;在b点曲线斜率|F' (X)|<1 ,为稳定平稳状态。 在图(2、中,有一个平稳状态a,且在该点曲线斜率|F' (X)|>1 ,为非稳定平稳状态。
人工神经网络基本概念
《神经网络》讲稿 主讲人:谷立臣教授 2003年9月
第1章基本概念 ?作为自然实例的人脑 ?人工神经元模型 ●人工神经网络的拓扑结构及其学习规则?神经网络的学习策略 ?人工神经网络与生物神经网络的比较?人工神经网络的发展与现状 ?人工神经网络与自动控制 ?人工神经网络与设备故障诊断 ?参考文献
?脑神经生理学家告诉我们:人脑借以记忆与思维的最基本单元是神经元,其数量 约为个; ?每一神经元约有个突触; ?神经元间通过突触形成的网络,传递着彼此间的兴奋与抑制;全部大脑神经元构成拓扑上极其复杂的网络群体,由这一网络群体实现记忆与思维。见图1-1。 111210~103410~10
每一个神经元包括细胞体(Cell body或Soma)和突起(Process)两部分。 ◆细胞体是神经元新陈代谢的中心,还是接收与处理信息的部件 ◆突起有两类,即轴突(Axon)与树突(Dendrite)。轴突的长度相差很大,长的可达1米。轴突的末端与树突进行信号传递的界面称为突触(synapse),通过突触向其他神经元发送出生物信息,在轴突中电脉冲的传导速度可达到10~100米/秒。另一类突起——树突(输入),一般较短,但分枝很多,它能接收来自其他神经元的生物电信号,从而与轴突一起实现神经元之间的信息沟通。突起的作用是传递信息。 ◆通过“轴突---突触――树突”这样的路径,某一神经元就有可能和数百个以至更多的神经元沟通信息。那些具有很长轴突的神经元,更可将信息从一脑区传送到另一脑区。
?绝大多数神经元不论其体积﹑形状﹑功能如何,不论是记忆神经元还是运动神经元,均可分为一个输入(或感知)器官,一个代数求和器官,一个长距离传递器官和一个输出器官。见图1-2。 ?既然所有神经元的功能均是相近的,那么何以实现复杂的功能呢?答案是:无一功能是由单个神经元实现的,而是由许多神经元以不同的拓扑结构所共同产生的。这一平行处理性提高了神经网路系统的冗余度与可靠性。
人工神经网络概述及其在分类中的应用举例
人工神经网络概述及其在分类中的应用举例 人工神经网络(ARTIFICIAL NEURAL NETWORK,简称ANN)是目前国际上一门发展迅速的前沿交叉学科。为了模拟大脑的基本特性,在现代神经科学研究的基础上,人们提出来人工神经网络的模型。人工神经网络是在对人脑组织结构和运行机智的认识理解基础之上模拟其结构和智能行为的一种工程系统。 神经网络在2个方面与人脑相似: (1) 人工神经网络获取的知识是从外界环境中学习得来的。 (2) 互连神经元的连接强度,即突触权值,用于存储获取的信息。他既是高度非线性动力学系统,又是自适应组织系统,可用来描述认知、决策及控制的智能行为。神经网络理论是巨量信息并行处理和大规模并行计算的基础。 一人工神经网络的基本特征 1、并行分布处理:人工神经网络具有高度的并行结构和并行处理能力。这特别适于实时控制和动态控制。各组成部分同时参与运算,单个神经元的运算速度不高,但总体的处理速度极快。 2、非线性映射:人工神经网络具有固有的非线性特性,这源于其近似任意非线性映射(变换)能力。只有当神经元对所有输入信号的综合处理结果超过某一门限值后才输出一个信号。因此人工神经网络是一
种具有高度非线性的超大规模连续时间动力学系统。 3、信息处理和信息存储合的集成:在神经网络中,知识与信息都等势分布贮存于网络内的各神经元,他分散地表示和存储于整个网络内的各神经元及其连线上,表现为神经元之间分布式的物理联系。作为神经元间连接键的突触,既是信号转换站,又是信息存储器。每个神经元及其连线只表示一部分信息,而不是一个完整具体概念。信息处理的结果反映在突触连接强度的变化上,神经网络只要求部分条件,甚至有节点断裂也不影响信息的完整性,具有鲁棒性和容错性。 4、具有联想存储功能:人的大脑是具有联想功能的。比如有人和你提起内蒙古,你就会联想起蓝天、白云和大草原。用人工神经网络的反馈网络就可以实现这种联想。神经网络能接受和处理模拟的、混沌的、模糊的和随机的信息。在处理自然语言理解、图像模式识别、景物理解、不完整信息的处理、智能机器人控制等方面具有优势。 5、具有自组织自学习能力:人工神经网络可以根据外界环境输入信息,改变突触连接强度,重新安排神经元的相互关系,从而达到自适应于环境变化的目的。 6、软件硬件的实现:人工神经网络不仅能够通过硬件而且可借助软件实现并行处理。近年来,一些超大规模集成电路的硬件实现已经问世,而且可从市场上购到,这使得神经网络具有快速和大规模处理能力的实现网络。许多软件都有提供了人工神经网络的工具箱(或软件包)如Matlab、Scilab、R、SAS等。 二人工神经网络的基本数学模型