PID 通俗解释

PID控制原理
3个故事:看完您就明白了。
1、:PID的故事小明接到这样一个任务:有一个水缸点漏水(而且漏
水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发
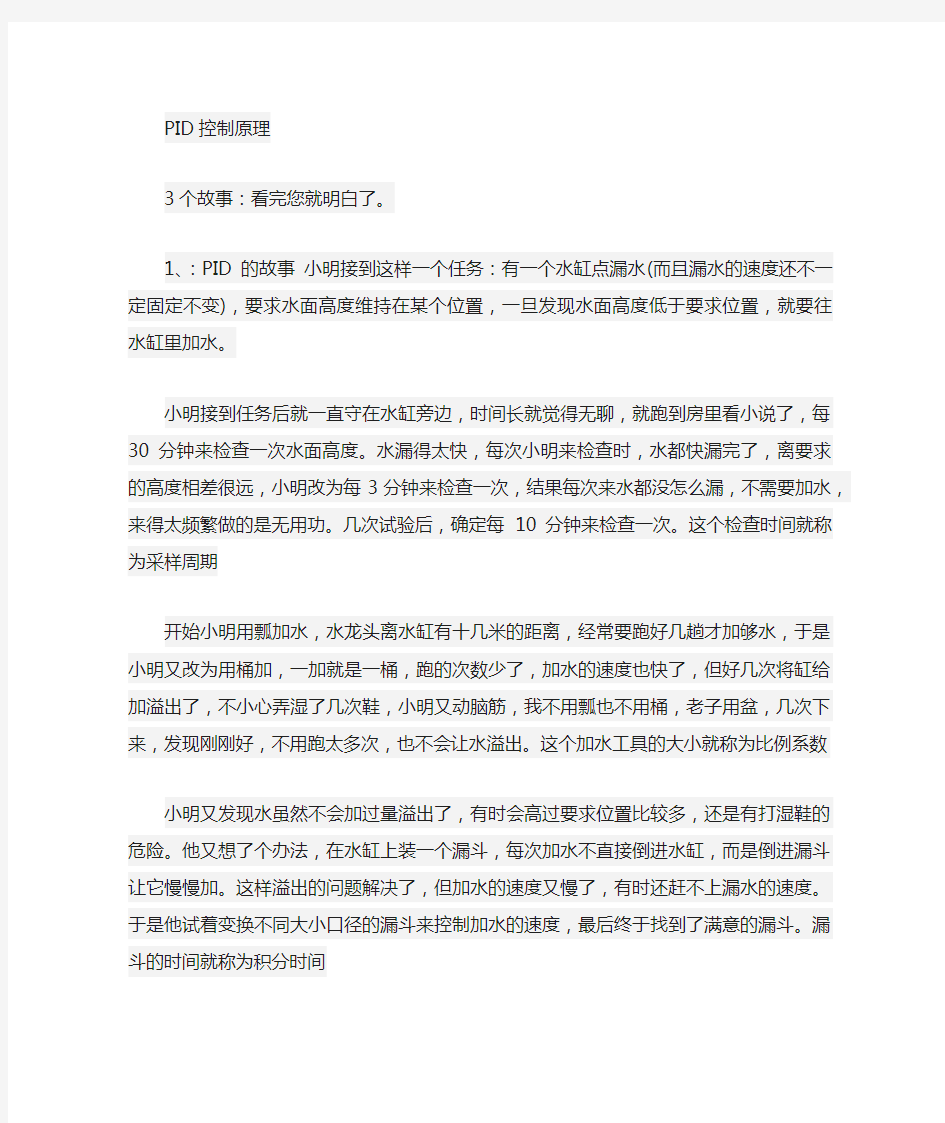
现水面高度低于要求位置,就要往水缸里加水。
小明接到任务后就一直守在水缸旁边,时间长就觉得无聊,就跑到房
里看小说了,每30分钟来检查一次水面高度。水漏得太快,每次小明
来检查时,水都快漏完了,离要求的高度相差很远,小明改为每3分
钟来检查一次,结果每次来水都没怎么漏,不需要加水,来得太频繁
做的是无用功。几次试验后,确定每10分钟来检查一次。这个检查时
间就称为采样周期
开始小明用瓢加水,水龙头离水缸有十几米的距离,经常要跑好几趟
才加够水,于是小明又改为用桶加,一加就是一桶,跑的次数少了,
加水的速度也快了,但好几次将缸给加溢出了,不小心弄湿了几次鞋,小明又动脑筋,我不用瓢也不用桶,老子用盆,几次下来,发现刚刚好,不用跑太多次,也不会让水溢出。这个加水工具的大小就称为比
例系数
小明又发现水虽然不会加过量溢出了,有时会高过要求位置比较多,
还是有打湿鞋的危险。他又想了个办法,在水缸上装一个漏斗,每次
加水不直接倒进水缸,而是倒进漏斗让它慢慢加。这样溢出的问题解
决了,但加水的速度又慢了,有时还赶不上漏水的速度。于是他试着
变换不同大小口径的漏斗来控制加水的速度,最后终于找到了满意的
漏斗。漏斗的时间就称为积分时间
小明终于喘了一口,但任务的要求突然严了,水位控制的及时性要求
大大提高,一旦水位过低,必须立即将水加到要求位置,而且不能高
出太多,否则不给工钱。小明又为难了!于是他又开努脑筋,终于让
它想到一个办法,常放一盆备用水在旁边,一发现水位低了,不经过
漏斗就是一盆水下去,这样及时性是保证了,但水位有时会高多了。
他又在要求水面位置上面一点将水凿一孔,再接一根管子到下面的备
用桶里这样多出的水会从上面的孔里漏出来。这个水漏出的快慢就称
为微分时间
看到几个问采样周期的帖子,临时想了这么个故事。微分的比喻一点
牵强,不过能帮助理解就行了,呵呵,入门级的,如能帮助新手理解
下PID,于愿足矣。故事中小明的试验是一步步独立做,但实际加水
工具、漏斗口径、溢水孔的大小同时都会影响加水的速度,水位超调
量的大小,做了后面的实验后,往往还要修改改前面实验的结果。
2、控制模型:人以PID控制的方式用水壶往水杯里倒印有刻度的半杯
水后停下;
设定值:水杯的半杯刻度;
实际值:水杯的实际水量;
输出值:水壶的倒处数量和水杯舀出水量;
测量传感器:人的眼睛
执行对象:人
正执行:倒水
反执行:舀水
1、P 比例控制,就是人看到水杯里水量没有达到水杯的半杯刻度,就
按照一定水量从水壶里王水杯里倒水或者水杯的水量多过刻度,就以
一定水量从水杯里舀水出来,这个一个动作可能会造成不到半杯或者
多了半杯就停下来。
说明:P比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差
(Steady-state error)。
2、PI 积分控制,就是按照一定水量往水杯里倒,如果发现杯里的水量没有刻度就一直倒,后来发现水量超过了半杯,就从杯里往外面舀水,然后反复不够就倒水,多了就舀水,直到水量达到刻度。
说明:在积分I控制中,控制器的输出与输入误差信号的积分成正比
关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称
这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积
分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制
器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
3、PID 微分控制,就是人的眼睛看着杯里水量和刻度的距离,当差距
很大的时候,就用水壶大水量得倒水,当人看到水量快要接近刻度的
时候,就减少水壶的得出水量,慢慢的逼近刻度,直到停留在杯中的
刻度。如果最后能精确停在刻度的位置,就是无静差控制;如果停在
刻度附近,就是有静差控制。
说明:在微分控制D中,控制器的输出与输入误差信号的微分(即误
差的变化率)成正比关系。
自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳,其
原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具
有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使
抑制误差作用的变化“超前”,即在误差接近零时,抑制误差的作用就
应该是零。这就是说,在控制器中仅引入“比例P”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它
能预测误差变化的趋势。这样,具有比例+微分的控制器,就能够提前
使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严
重超调。所以对有较大惯性或滞后的被控对象,比例P+积分I+微分D (PID)控制器能改善系统在调节过程中的动态特性。
3、看了《PID的故事》,引发了我这样一个思考:
小时候,我学习骑自行车的经历至今都使我记忆犹新。
60年代初,那时候没有现在这样的各种各样的小自行车,都是28"的
大杠,什么…永久?…飞鸽?牌等等,而且,一般的家庭有个自行车就像现
在的家庭拥有一部私家轿车差不多。借了同学爸爸的一部,在学校操
场上就和同学两个人自学了起来,没有教练!可想而知,(因为个子
比较矮)摔了不少跟头,车子也伤痕累累,屁股下都磨破了。也许我
不是很聪明?但是我又不认为自己是个笨学生,因为我的每门功课都
在95分以上。为什么学个自行车就这么难呢?
此事过后,我就在思考:自己学骑车的过程无疑是比较差的,这样学
习肯定是不可取的。假如今后要我教别人骑自行车,我应该如何在自
己痛苦经历的基础上总结?能否以最简单的方法并以最快的速度教会
别人?一般教人骑车的都会这样教导:“眼睛往前看,不要看前轮。腰
不要扭!身子要坐正,”等等。可是学骑车的人这时身临其境,紧张的
是无法掌控自己的!不是吗?
其实,无论学什么,学习方法很重要,教人学习的方法更重要!一个
好的老师往往能影响学生的一生!
复杂与简单,往往在一念之间。于是我总结出了学自行车的十字口诀:“车身往哪倒,龙头往哪拐!”只要一拐,车身就正了。坐上自行车,
脑子里就想着这十个字,简单吧!至于其他要求,如:“眼睛往前看,
不要看前轮。腰不要扭!身子要坐正,等等”,随便你,没有任何规定
和要求。经验告诉我,再不聪明的人不出半小时,保证让你学会骑车
上路。不信你试试!
一块上学,一块工作。为什么有人成功了?而我却离成功还有一段不
小的距离?正确的学习方法你掌握住了吗
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分
控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70
年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工
业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或
得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控
制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控
制技术最为方便。即当我们不完全了解一个系统和被控对象﹐或不能
通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID 控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,
利用比例、积分、微分计算出控制量进行控制的。
比例(P)控制
比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号
成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
积分(I)控制
在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对
一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制
系统是有稳态误差的或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取
决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差
很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大
使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,
可以使系统在进入稳态后无稳态误差。
微分(D)控制
在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现
振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。
解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,
抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例”项
往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加
的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控
制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而
避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比
例+微分(PD)控制器能改善系统在调节过程中的动态特性。
在PID参数进行整定时如果能够有理论的方法确定PID参数当然是最
理想的方法,但是在实际的应用中,更多的是通过凑试法来确定PID
的参数。
增大比例系数P一般将加快系统的响应,在有静差的情况下有利于减
小静差,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏。
增大积分时间I有利于减小超调,减小振荡,使系统的稳定性增加,
但是系统静差消除时间变长。
增大微分时间D有利于加快系统的响应速度,使系统超调量减小,稳
定性增加,但系统对扰动的抑制能力减弱。
在凑试时,可参考以上参数对系统控制过程的影响趋势,对参数调整
实行先比例、后积分,再微分的整定步骤。
PID控制原理:
1、比例(P)控制:比例控制是一种最简单的控制方式。其控制器的
输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳
态误差。
2、积分(I)控制:在积分控制中,控制器的输出与输入误差信号的
积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态
误差,则称这个控制系统是有稳态误差的或简称有差系统。为了消除
稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间
的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积
分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误
差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系
统在进入稳态后无稳态误差。
3、微分(D)控制:在微分控制中,控制器的输出与输入误差信号的
微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调
节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组
件(环节)或有滞后组件,具有抑制误差的作用,其变化总是落后于
误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误
差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅
引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而
目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有
比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至
为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的
被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。PID控制器参数整定的一般方法:
PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过
程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两大类:
一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算
确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必
须通过工程实际进行调整和修改;
二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中
进行,且方法简单、易于掌握,在工程实际中被广泛采用。PID控制
器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。
三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公
式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后调整与完善。
现在一般采用的是临界比例法。利用该方法进行 PID控制器参数的整
定步骤如下:(1)首先预选择一个足够短的采样周期让系统工作;(2)仅
加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下
这时的比例放大系数和临界振荡周期;(3)在一定的控制度下通过公式
计算得到PID控制器的参数。
PID参数的设定:是靠经验及工艺的熟悉,参考测量值跟踪与设定值
曲线,从而调整P、I、D的大小。
书上的常用口诀:
参数整定找最佳,从小到大顺序查;
先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大湾,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来;
动差大来波动慢。微分时间应加长;
理想曲线两个波,前高后低4比1;
一看二调多分析,调节质量不会低。
个人认为PID参数的设置的大小,一方面是要根据控制对象的具体情
况而定;另一方面是经验。P是解决幅值震荡,P大了会出现幅值震荡
的幅度大,但震荡频率小,系统达到稳定时间长;I是解决动作响应的
速度快慢的,I大了响应速度慢,反之则快;D是消除静态误差的,一
般D设置都比较小,而且对系统影响比较小。
PID参数怎样调整最佳
(1)整定比例控制
将比例控制作用由小变到大,观察各次响应,直至得到反应快、超调
小的响应曲线。
(2)整定积分环节
若在比例控制下稳态误差不能满足要求,需加入积分控制。
先将步骤(1)中选择的比例系数减小为原来的50~80%,再将积分时间置一个较大值,观测响应曲线。然后减小积分时间,加大积分作用,并相应调整比例系数,反复试凑至得到较满意的响应,确定比例和积
分的参数。
(3)整定微分环节
若经过步骤(2),PI控制只能消除稳态误差,而动态过程不能令人满意,则应加入微分控制,构成PID控制。先置微分时间TD=0,逐渐加大TD,同时相应地改变比例系数和积分时间,反复试凑至获得满意的
控制效果和PID控制参数。
长期股权投资通俗易懂式讲解学过保证会
长期股权投资通俗易懂 式讲解学过保证会 Document serial number【LGGKGB-LGG98YT-LGGT8CB-LGUT-
第二节长期股权投资的后续计量 第四讲我们主要介绍了长期股权投资后续计量,教材权益法第二个问题:(二)投资损益确认中因在投资日被投资单位账面价值与公允价值不同,期末被投资单位实现净利润时,投资方怎么处理的问题。今天这一讲,我们介绍一下投资方与被投资方之间发生内部交易时,我们怎么调整被投资方的期末净利润的问题,其实说白了就是按照多少金额确认投资收益的问题。 首先,我们想一下,投资方与被投资方发生交易,投资方在期末因被投资方净利润确认投资收益时,为什么要调整他们之间的内部交易呢?其实很简单,我们只要站准角度就很容易理解,那么我们要站在什么角度看待这个问题呢?我们需要站在投资方与被投资方的外部看这个问题,既然投资方能够进行权益法核算,说明投资方能够共同控制或对被投资方有重大影响,那么投资方与被投资方可以说都是自己人。从报表使用者的角度,为了避免出现这种情况:也就是你投资方为了业绩的要求,或者你被投资为了业绩的要求,将自己的资产出售给对方,以增加自己的利润,这样出来的财务报表会误导财务报表使用者。所以为了避免出现这种情况,只要你们之间进行的内部交易,对于未实现的利润部分就要抵消。当然对于已经实现的部分就不要抵消了。什么叫未实现的损益,什么又叫已经实现的损益呢?对于双方都作为存货的资产来说,投资方将存货卖给被投资方,或者被投资方将存货卖给投资方,我们说了他们之间的交易是可能被控制的(因为投资方对被投资方可以共同控制或重大影响,也相当于自己人),只要他们之间的存货卖给他们之外的没有关联的第三方,就说明他们之间的交易产生的损益已经实现,如果另外一方买过来之后还没有全部卖给其他第三方,就有未实现的损益;如果对于一方是存货,另外一方购买后作为固定资产呢,这时候的损益要考虑两个方面了,一方面是出售存货产生的利润,另外一方面是作为固定资产使用的一方是需要计提折旧的,对于未实现损益部分计提的折旧,相当于是减少利润的。这两个数据相加就是这个交易对损益的影响。 知道了上述为什么抵消之后,我们再讲一讲,是按照100%抵消呢,还是按照持股比例抵消。通过上面的分析按道理来讲是应该100%抵消的,但是教材说权益法发生的内部交易未实现损益的抵消,只要按照投资方的持股比例抵消就可以。这个怎么理解呢?我们可以这样想:投资方与被投资方虽然都是自己人,但是毕竟不能完全控制,不像对子公司的投资,不能完全左右对方,投资方只能实现自己持股比例的影响,所以抵消的时候,只需要抵消未实现内部交易利润乘以持股比例的部分。 我们教材将投资方出售给被投资的交易叫顺流交易,将被投资出售给投资方的交易叫逆流交易。 下面我们来看一下教材的例题: 【教材例5-12】甲公司持有乙公司20%有表决权的股份,能够对乙公司施加重大影响。2×09年9月,甲公司将其账面价值为8 000 000元的商品以12 000 000 的价格出售给乙公司,乙公司将取得的商品作为管理用固定资产,预计使用寿命为10年,净残值为0。假定甲公司取得该项投资时,乙公司各项可辨认资产、负债的公允价值与其账面价值相同,两者在以前期间未发生过内部交易。乙公司2×09年实现净利润为20 000 000元。不考虑相关税费等其他因素影响。
长期股权投资通俗易懂式讲解
第五章长期股权投资通俗易懂式讲解(一) 第一节长期股权投资的范围和初始计量 一、长期股权投资的范围 教材在这个知识点讲了这么一个事情,那就是:企业进行的哪些投资属于长期股权投资。那我们从“长期股权投资”这几个字想一下,长期就意味着长期持有,那对于这样的投资,我们就在长期股权科目下核算。 教材说了下面三种投资属于长期股权投资: 1、对子公司的投资,即投资方能对被投资单位实施控制的权益性投资。(试想一下,都能够控制了,可想股权投资比例不小,应该是奔着长期去的。那控制又是什么概念呢,就是你说了算) 2、对合营企业投资,即投资方与其他合营方一同对被投资单位实施共同 控制且对被投资单位净资产享有权利的权益性投资。(试想一下,共同控制,可想股权投资比例也不小,应该是奔着长期去的。那共同控制又是什 么概念呢,就是你和唯一的另一股东两个人商量好了,这个事情就可以定了) 3、对联营企业投资,即投资方对被投资单位具有重大影响的权益性投资(这个可以这样理解:我的意见对被投资方的经营决策有重大的影响,如果你去股票市场买股票,你能够对你买股票的这个公司经营有什么影响 吗?所以有重大影响,也是长期持有了,投资不小了)所以对上述范围只 要掌握:我对被投资单位有控制(子公司),共同控制(合营企业),重 大影响(联营企业),就需要在长期股权这里核算。 二、长期股权投资初始计量
(一)企业合并形成的长期股权投资 企业合并,是指将两个或者两个以上单独的企业合并形成一个报告主体的 交易或事项。(大家可能会有疑问:企业合并是什么意思呢?其实很简单,对于那些大集团公司(称为母公司),下面有很多子公司,那个集团公司 的股东,年末要知道这个集团公司年末财务报表的数据是怎么样的,是不是要把给你公司的报表拿过来一个一个看啊?想想也不是,他们是要一个合并在一起的报表,这样一看就知道这个集团的经营状况了,这个就叫企业合并财务报表) 1 .同一控制下企业合并形成的长期股权投资 (同一控制下,就是说受同一个投资者控制。这个投资者下面有很多子公司,那些子公司之间相互投资合并,不论怎么合并,最终还是受那个投资 者控制,所以就叫同一控制下企业合并)那么同一控制下企业合并形成长期股权投资的初始成本怎么确认呢?教材上说:合并方以支付现金、转让非现金资产或承担债务方式作为合并对价的,应当在合并日按照所取得的被合并方在最终控制方合并财务报表中的净资产的账面价值的份额作为 长期股权投资的初始投资成本。(我们先用中学学语文那样抓主干:以什么为对价,取得被合并方账面价值的份额作为初始投资成本,也就是说 长期股权投资的初始投资成本就是被投资方账面价值的份额,比如你持有被合并方51%的股份,那长期股权投资的初始投资成本就是被投资方账面 价值乘以51%)(我们接着看,你是以现金、或者其他资产给被合并方, 来换取被合并方账面价值乘以51%,那么你付出的现金或其他资产原先在 你的账面是有金额的,而被合并方账面价值乘以51%又是一个金额,这两
(高人总结)长期股权投资-通俗易懂式讲解
第一节长期股权投资的范围和初始 计量 一、长期股权投资的范围 教材在这个知识点讲了这么一个事情,那就是:企业进行的哪些投资属于长期股权投资。那我们从“长期股权投资”这几个字想一下,长期就意味着长期持有,那对于这样的投资,我们就在长期股权科目下核算。 教材说了下面三种投资属于长期股权投资: 1、对子公司的投资,即投资方能对被投资单位实施控制的权益性投资。(试想一下,都能够控制了,可想股权投资比例不小,应该是奔着长期去的。那控制又是什么概念呢,就是你说了算) 2、对合营企业投资,即投资方与其他合营方一同对被投资 权益性投资。(试想一下,共同控制,可想股权投资比例也不小,应该是奔着长期去的。那共同控制又是什么概念呢,就是你和唯一的另一股东两个人商量好了,这个事情就可以定了) 3、对联营企业投资,即投资方对被投资单位具有重大影响的权益性投资(这个可以这样理解:我的意见对被投资方的经营决策有重大的影响,如果你去股票市场买股票,你能够
对你买股票的这个公司经营有什么影响吗?所以有重大影响,也是长期持有了,投资不小了) 所以对上述范围只要掌握:我对被投资单位有控制(子公司),共同控制(合营企业),重大影响(联营企业),就需要在长期股权这里核算 二、长期股权投资初始计量 (一)企业合并形成的长期股权投资 企业合并,是指将两个或者两个以上单独的企业合并形成一个报告主体的交易或事项。(大家可能会有疑问:企业合并是什么意思呢?其实很简单,对于那些大集团公司(称为母公司),下面有很多子公司,那个集团公司的股东,年末要知道这个集团公司年末财务报表的数据是怎么样的,是不是要把给你公司的报表拿过来一个一个看啊?想想也不是,他们是要一个合并在一起的报表,这样一看就知道这个集团的经营状况了,这个就叫企业合并财务报表) 1 .同一控制下企业合并形成的长期股权投资 (同一控制下,就是说受同一个投资者控制。这个投资者下面有很多子公司,那些子公司之间相互投资合并,不论怎么合并,最终还是受那个投资者控制,所以就叫同一控制下企业合并) 二、 三、
通俗易懂和弦讲解教程
和弦教程2017年3月15日整理
目录 一、和弦的概念、由来。 (1) 1、什么是和弦? (1) 2、和弦怎么来的? (1) 二、电子琴上的和弦 (2) 1、自动和弦与手动和弦。 (2) 2、单指和弦与多指和弦。 (4) 三、最常用的三类和弦 (5) 1、三类最常用的和弦 (5) (1)、大三和弦 (5) (2)、小三和弦 (6) (3)、属七和弦 (6) 2、单指和弦弹法 (6) (1)、大三和弦单指弹法 (6) (2)、小三和弦单指弹法 (7) (3)、属七和弦单指弹法 (7)
3、多指和弦弹法 (8) (1)、大三和弦多指弹法 (8) (2)小三和弦与属七和弦的多指弹法 (9) 四、和弦的变化与级数 (10) 1、多指和弦的省略 (10) 2、和弦的转位 (11) *3、调式中和弦的级数 (11) *五、浅易配和弦初步 (13) 1、几点要则 (13) 2、实战演习 (15) 辨析词:和弦、自动和弦、手动和弦、单指和弦、多指和弦、大三和弦、小三和弦、属七和弦、原位和弦、转位和弦、I级和弦/主和弦、IV级和弦/下属和弦、V级和弦/属和弦。 先修知识:音名和唱名、音符与键盘的对应、升降号。后两节内容还需要:各个大小调中的音与音级、罗马数字。
一、和弦的概念、由来。 1、什么是和弦? 和弦,通俗的解释为伴随着“旋律”,使整个音乐更丰富、饱满、好听的乐音。(所谓乐音,意即:不含打击乐的声音)拿我表姐对手机铃声和弦的话就是“好多个声儿,好听”。 本天体给学生讲课时一直在用这个说法。至于它的正规定义,此处无需作叙述。 我们可以这么理解:一个人唱歌时,唱的是“旋律”。旁边给他伴奏的钢琴、乐队或录音带,可以先粗略地近似理解为起“和弦”的作用、起衬托、充实歌曲的作用。 2、和弦怎么来的? 谁都知道唱歌时有伴奏会比干唱要好听。人们在长期的音乐实践中,总结出哪些音在什么时候组合起来会悦耳。于是一代代地继承并发扬。音乐逐渐由单音演变为多音,并带上了拍子、强
SPI总线通俗易懂讲解
SPI总线通俗易懂讲解 SPI总线 MOTOROLA公司的SPI总线的基本信号线为3根传输线,即SI、SO、SCK。传输的速率由时钟信号SCK决定,SI为数据输入、SO为数据输出。采用SPI总线的系统如图8-27所示,它包含了一个主片和多个从片,主片通过发出片选信号-CS来控制对哪个从片进行通信,当某个从片的-CS信号有效时,能通过SI接收指令、数据,并通过SO发回数据。而未被选中的从片的SO端处于高阻状态。 图8-27 SPI总线的系统 主片在访问某一从片时,必须使该从片的片选信号有效;主片在SCK信号的同步下,通过SI线发出指令、地址信息;如需将数据输出,则接着写指令,由SCK同步在SI线上发出数据;如需读回数据,则接着读指令,由主片发出SCK,从片根据SCK的节拍通过SO发回数据。 因而对具有SPI接口的从片器件来讲,SCK、SI是输入信号,SO是输出信号。SCK 用于主片和从片通信的同步。SI用于将信息传输到器件,输入的信息包括指令、地址和数据,指令、地址和数据的变化在SCK的低电平期间进行,并由SCK信号的上升沿锁存。
SO用于将信息从器件传出,传出的信息包括状态和数据,信息在SCK信号的下降沿移出。 Microchip公司的25XX系列的串行E2PROM采用了SPI总线,该系列器件的性能如表8-2所示。
表8-2 Microchip公司的25XX系列的串行E2PROM 型号25XX04025XX08025XX16025XX320 容量 4K (512 X 8bit) 8K (1024 X 8bit) 16K (4096 X 8bit) 32K (4096 X 8bit) 地址信号A0~A8A0~A9A0~A10A0~A11以25XX320为例,该器件是4K字节的E2PROM,结构如图8-28所示,接口信号为SCK、SI和SO,此外还具有-CS、-WP、-HOLD信号线。其中-CS为器件选中信号,当此信号为低电平时器件被选中,高电平时器件处于等待状态。 图8-28 25XX320的结构 与并行接口电路不同的是,在并行接口电路中对器件进行操作的控制信号,在串行接口电路中只能用指令实现,25XX320的操作指令有数据读指令、写操作的允许和禁止指令、写数据指令和状态寄存器的读写指令。在器件的内部有一个8位的指令寄存器,在SCK的
傅里叶变换 讲解最通俗易懂的一片
【纯技术帖】为什么要进行傅立叶变换?傅立叶变换究竟有何意义?如何用Matlab实现快速傅立叶 变换?来源:胡姬的日志 写在最前面:本文是我阅读了多篇相关文章后对它们进行分析重组整合而得,内容非我所原创。在此 向多位原创作者致敬!!! 一、傅立叶变换的由来 关于傅立叶变换,无论是书本还是在网上可以很容易找到关于傅立叶变换的描述,但是大都是些故弄玄虚的文章,太过抽象,尽是一些让人看了就望而生畏的公式的罗列,让人很难能够从感性上得到理解,最近,我偶尔从网上看到一个关于数字信号处理的电子书籍,是一个叫Steven W. Smith, Ph.D.外国人写的,写得 非常浅显,里面有七章由浅入深地专门讲述关于离散信号的傅立叶变换,虽然是英文文档,我还是硬着头皮看完了有关傅立叶变换的有关内容,看了有茅塞顿开的感觉,在此把我从中得到的理解拿出来跟大家分享,希望很多被傅立叶变换迷惑的朋友能够得到一点启发,这电子书籍是免费的,有兴趣的朋友也可以从网上下载下来看一下,URL地址是: https://www.360docs.net/doc/082333902.html,/pdfbook.htm 要理解傅立叶变换,确实需要一定的耐心,别一下子想着傅立叶变换是怎么变换的,当然,也需要一定的高等数学基础,最基本的是级数变换,其中傅立叶级数变换是傅立叶变换的基础公式。 二、傅立叶变换的提出 让我们先看看为什么会有傅立叶变换?傅立叶是一位法国数学家和物理学家的 名字,英语原名是Jean Baptiste Joseph Fourier(1768-1830), Fourier对热传递很感兴趣,于1807年在法国科学学会上发表了一篇论文,运用正弦曲线来描述温度分布,论文里有个在当时具有争议性的决断:任何连续周期信号可以由一组适当的正弦曲线组合而成。当时审查这个论文的人,其中有两位是历史上著名的数学家拉格朗日(Joseph Louis Lagrange, 1736-1813)和拉普拉斯(Pierre Simon de Laplace, 1749-1827),当拉普拉斯和其它审查者投票通过并要发表这个论文时,拉格朗日坚决反对,在近50年的时间里,拉格朗日坚持认为傅立叶的方法无法表示带有棱角的信号,如在方波中出现非连续变化斜率。法国科学学会屈服于拉格朗日的威望,拒绝了傅立叶的工作,幸运的是,傅立叶还有其它事情可忙,他参加了政治运动,随拿破仑远征埃及,法国大革命后因会被推上断头台而一直在逃避。直到拉格朗日死后15年这个论文才被发表出来。 谁是对的呢?拉格朗日是对的:正弦曲线无法组合成一个带有棱角的信号。但是,我们可以用正弦曲线来非常逼近地表示它,逼近到两种表示方法不存在能量差别,基于此,傅立叶是对的。 为什么我们要用正弦曲线来代替原来的曲线呢?如我们也还可以用方波或三角 波来代替呀,分解信号的方法是无穷的,但分解信号的目的是为了更加简单地处理原来的信号。用正余弦来表示原信号会更加简单,因为正余弦拥有原信号所不具有的性质:正弦曲线保真度。一个正弦曲线信号输入后,输出的仍是正弦曲线,
什么是PID—一种通俗易懂的讲解
控制模型:你控制一个人让他以PID控制的方式走110步后停下。 (1)P比例控制,就是让他走110步,他按照一定的步伐走到一百零几步(如108步)或100多步(如112步)就停了。 说明: P比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。 (2)PI积分控制,就是他按照一定的步伐走到112步然后回头接着走,走到108步位置时,然后又回头向110步位置走。在110步位置处来回晃几次,最后停在110步的位置。 说明: 在积分I控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。 (3)PD微分控制,就是他按照一定的步伐走到一百零几步后,再慢慢地向110步的位置靠近,如果最后能精确停在110步的位置,就是无静差控制;如果停在110步附近(如109步或111步位置),就是有静差控制。 说明: 在微分控制D中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳,其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例P”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势。这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例P+微分D(PD)控制器能改善系统在调节过程中的动态特性。 很多同学都不清楚PID是个什么东西,因为很多不是自动化的学生。他们开口就要资料,要程序。 这是明显的学习方法不对,起码,首先,你要理解PID是个什么东西。 本文以通俗的理解,以小车纵向控制举例说明PID的一些理解。
spi总线通俗易懂讲解
SPI总线 MOTOROLA公司的SPI总线的基本信号线为3根传输线,即SI、SO、SCK。传输的速率由时钟信号SCK决定,SI为数据输入、SO为数据输出。采用SPI总线的系统如图8-27所示,它包含了一个主片和多个从片,主片通过发出片选信号-CS来控制对哪个从片进行通信,当某个从片的-CS信号有效时,能通过SI接收指令、数据,并通过SO发回数据。而未被选中的从片的SO端处于高阻状态。 图8-27 SPI总线的系统 主片在访问某一从片时,必须使该从片的片选信号有效;主片在SCK信号的同步下,通过SI线发出指令、地址信息;如需将数据输出,则接着写指令,由SCK同步在SI线上发出数据;如需读回数据,则接着读指令,由主片发出SCK,从片根据SCK的节拍通过SO发回数据。 因而对具有SPI接口的从片器件来讲,SCK、SI是输入信号,SO是输出信号。SCK用于主片和从片通信的同步。SI用于将信息传输到器件,输入的信息包括指令、地址和数据,指令、地址和数据的变化在SCK的低电平期间进行,并由SCK信号的上升沿锁存。SO用于将信息从器件传出,传出的信息包括状态和数据,信息在SCK信号的下降沿移出。 Microchip公司的25XX系列的串行E2PROM采用了SPI总线,该系列器件的性能如表8-2所示。 以25XX320为例,该器件是4K字节的E2PROM,结构如图8-28所示,接口信号为SCK、SI和SO,此外还具有-CS、-WP、-HOLD信号线。其中-CS为器件选中信号,当此信号为低电平时器件被选中,高电平时器件处于等待状态。 图8-28 25XX320的结构 与并行接口电路不同的是,在并行接口电路中对器件进行操作的控制信号,在串行接口电路中只能用指令实现,25XX320的操作指令有数据读指令、写操作的允许和禁止指令、写数据指令和状态寄存器的读写指令。在器件的内部有一个8位的指令寄存器,在SCK的上升沿,通过SI信号线,指令输入到上述寄存器并被执行。
高人总结长期股权投资-通俗易懂式讲解
终于(高人总结)长期股权投资通俗易懂式讲解 第一节长期股权投资的围和初始计量 一、长期股权投资的围 教材在这个知识点讲了这么一个事情,那就是:企业进行的哪些投资属于长期股权投资。那我们从“长期股权投资”这几个字想一下,长期就意味着长期持有,那对于这样的投资,我们就在长期股权科目下核算。 教材说了下面三种投资属于长期股权投资: 1、对子公司的投资,即投资方能对被投资单位实施控制的权益性投资。(试想一下,都能够控制了,可想股权投资比例不小,应该是奔着长期去的。那控制又是什么概念呢,就是你说了算) 2、对合营企业投资,即投资方与其他合营方一同对被投资单位实施共同控制且对被投资单位净资产享有权利的 权益性投资。(试想一下,共同控制,可想股权投资比例也不小,应该是奔着长期去的。那共同控制又是什么概念呢,就是你和唯一的另一股东两个人商量好了,这个事情就可以定了) 3、对联营企业投资,即投资方对被投资单位具有重大影响的权益性投资(这个可以这样理解:我的意见对被投资方的经营决策有重大的影响,如果你去股票市场买股票,你能够对你买股票的这个公司经营有什么影响吗?所以有重大影响,也是长期持有了,投资不小了) 所以对上述围只要掌握:我对被投资单位有控制(子公司),共同控制(合营企业),重大影响(联营企业),就需要在长期股权这里核算 二、长期股权投资初始计量 (一)企业合并形成的长期股权投资 企业合并,是指将两个或者两个以上单独的企业合并形成一个报告主体的交易或事项。(大家可能会有疑问:企业合并是什么意思呢?其实很简单,对于那些大集团公司(称为母公司),下面有很多子公司,那个集团公司的股东,年末要知道这个集团公司年末财务报表的数据是怎么样的,是不是要把给你公司的报表拿过来一个一个看啊?想想也不是,他们是要一个合并在一起的报表,这样一看就知道这个集团的经营状况了,这个就叫企业合并财务报表) 1 .同一控制下企业合并形成的长期股权投资
海明码最通俗易懂的讲解
海明码(又称汉明码):海明码是在信息字段中插若干位数据,用于监督码字里的哪一位数据发生了变化,具有一位纠错能力。假设信息位有k 位,整个码字的长度就是k+r ;每一位的数据只有两种状态,不是1就是0,有r 位数据就应该能表示出r 2种状态,如果每一种状态代表一个码元发生了错误,有k+r 位码元,就要有k+r 种状态来表示,另外还要有一种状态来表示数据正确的情况,所以r k r +≥-12才能检查一位错误,即12++≥r k r 。例如,信息数据有4位,由12++≥r k r 得r>=3,也就是至少需要3位监督数据才能发现并改正1位错误。比如:给8个学员进行编号,可以用三位数来编码:学号为000 、001 ……、111;也可以用五位数来编号:学号为00000 、00001 、00010 、……、00111,但是没有必要用五位呀,只要能满足编码的要求就可以了,所以我们只需要求出满足条件的最小的k 值即可。 海明码求解具体步骤: ① 确定校验码的位数k ② 确定校验码的位置 ③ 确定数据的位置 ④ 求出校验位的值 下面开始实战练习。假设我们要推导D= 101101这串二进制的海明码,按照步骤一步步来: ① 确定校验码的位数k 数据的位数k=6,按照上面说的公式来计算满足条件r 的最小值,如下公式: r k r +≥-12 即:r r +≥72 解此不等式得:满足不等式的最小r=4,也就是D=101101的海明码应该有6+4=10位,其中原数据6位,校验码4位。 ② 确定校验码的位置 不妨设设这4为校验码分别为1P 、2P 、3P 、4P ;数据从左到右为1D 、2D 、……、6D 。 编码后的数据共有6+4=10位,设为1M 、2M 、……10M 。 校验码i P (i 取1,2,3,4)在编码中的位置为1 2 -i ,如下表所示: ③ 确定数据的位置 这个很简单,除了校验码的位置其余的就是数据的位置,填充进去就可以了,于是可以把数据信息先填进去,见“乙”行,下面就是最关键的部分,求出校验位的值啦!!! ④ 求出校位的值 这个公式不是难,99%左右的考生都能看懂海明码的求解过程,但是真正能够过目不忘的相信就是极少数了,很多考生在论坛抱怨躺在床上眼睛一闭,一睁,就忘记了一半。眼睛 1M 2M 3M 4M 5M 6M 7M 8M 9M 10M 甲 1P 2P 3P 4P 1M 2M 3M 4M 5M 6M 7M 8M 9M 10M 甲 1P 2P 1D 3P 2D 3D 4D 4P 5D 6D 乙 1 1 1 1
通俗易懂的讲解OFDM
章节一:时域上的OFDM OFDM的"O"代表着"正交",那么就先说说正交吧。 首先说说最简单的情况,sin(t)和sin(2t)是正交的【证明:sin(t)·sin(2t)在区间[0,2π]上的积分为0】,而正弦函数又是波的最直观描述,因此我们就以此作为介入点。既然本文说的是图示,那么我们就用图形的方式来先理解一下正交性。【你如果能从向量空间的角度,高屋建瓴的看待这个问题的话,你也就不是"小白"了,R U?】 在下面的图示中,在[0,2π]的时长内,采用最易懂的幅度调制方式传送信号:sin(t)传送信号a,因此发送a·sin(t),sin(2t)传送信号b,因此发送b·sin(2t)。其中,sin(t)和sin(2t)的用处是用来承载信号,是收发端预先规定好的信息,在本文中一律称为子载波;调制在子载波上的幅度信号a和b,才是需要发送的信息。因此在信道中传送的信号为 a·sin(t)+b·sin(2t)。在接收端,分别对接收到的信号作关于sin(t)和sin(2t)的积分检测,就可以得到a和b了。(以下图形采用google绘制) 图一:发送a信号的sin(t) 图二:发送b信号的sin(2t)【注意:在区间[0,2π]内发送了两个完整波形】
图三:发送在无线空间的叠加信号a·sin(t)+b·sin(2t) 图四:接收信号乘sin(t),积分解码出a信号。【如前文所述,传送b信号的sin(2t)项,在积分后为0】 图五:接收信号乘sin(2t),积分解码出b信号。【如前文所述,传送a信号的sin(t)项,在积分后为0】 图六:流程图
到了这里,也许你会出现两种状态: 一种是:啊,原来是这样,我懂了。 一种是:啊,怎么会这样,我完全无法想象。这里要说的是,你根本用不着去想象(visualize)。数学中是如此定义正交的,数学证明了它们的正交性,那么他们就是正交的,【他们就可以互不干扰的承载各自的信息】。选取sin(t)和sin(2t)作为例子,正式因为它们是介于直观和抽象的过渡地带,趟过去吧。 上面的图示虽然简单,但是却是所有复杂的基础。 1.1下一步,将sin(t)和sin(2t)扩展到更多的子载波序列{sin(2π·Δf·t),sin(2π·Δf·2t),sin(2π·Δf·3t),...,sin(2π·Δf·kt)}(例如k=16,256,1024等),应该是很好理解的事情。其中,2π是常量;Δf是事先选好的载频间隔,也是常量。1t,2t,3t,...,kt保证了正弦波序列的正交性。 1.2再下一步,将cos(t)也引入。容易证明,cos(t)与sin(t)是正交的,也与整个sin(kt)的正交族相正交。同样,cos(kt)也与整个sin(kt)的正交族相正交。因此发射序列扩展到{sin(2π·Δf·t),sin(2π·Δf·2t),sin(2π·Δf·3t),...,sin(2π·Δf·kt),cos(2π·Δf·t),cos(2π·Δf·2t),cos(2π·Δf·3t),...,cos(2π·Δf·kt)}也就顺理成章了。 1.3经过前两步的扩充,选好了2组正交序列sin(kt)和cos(kt),这只是传输的"介质"。真正要传输的信息还需要调制在这些载波上,即sin(t),sin(2t),...,sin(kt)分别幅度调制 a1,a2,...,ak信号,cos(t),cos(2t),...,cos(kt)分别幅度调制b1,b2,...,bk信号。这2n组互相正交的信号同时发送出去,在空间上会叠加出怎样的波形呢?做简单的加法如下: f(t)=a1·sin(2π·Δf·t)+ a2·sin(2π·Δf·2t)+ a3·sin(2π·Δf·3t)+ ... ak·sin(2π·Δf·kt)+ b1·sin(2π·Δf·t)+ b2·sin(2π·Δf·2t)+ b3·sin(2π·Δf·3t)+ ... bk·sin(2π·Δf·kt)+ =∑ak·sin(2π·Δf·kt)+∑bk·cos(2π·Δf·kt)【公式1-1:实数的表达】
通俗易懂和弦讲解教程
和弦教程2017年 3 月15 日整理
目录 一、和弦的概念、由来。 (1) 1、什么是和弦? (1) 2、和弦怎么来的? (1) 二、电子琴上的和弦 (2) 1、自动和弦与手动和弦。 (2) 2、单指和弦与多指和弦。 (4) 三、最常用的三类和弦 (5) 1、三类最常用的和弦 (5) (1)、大三和弦 (5) (2)、小三和弦 (6) (3)、属七和弦 (6) 2、单指和弦弹法 (6) (1)、大三和弦单指弹法 (6) (2)、小三和弦单指弹法 (7) (3)、属七和弦单指弹法 (7)
3、多指和弦弹法 (8) (1)、大三和弦多指弹法 (8) (2)小三和弦与属七和弦的多指弹法 (9) 四、和弦的变化与级数................................. 1 0 1、多指和弦的省略................................. 1 0 2、和弦的转位..................................... 1 1 *3 、调式中和弦的级数............................. 1 1 * 五、浅易配和弦初步.................................. 1 3 1、几点要则....................................... 1 3 2、实战演习....................................... 1 5 辨析词:和弦、自动和弦、手动和弦、单指和弦、多指和弦、大三和弦、小三和弦、属七和弦、原位和弦、转位和弦、I 级和弦/主和弦、 IV级和弦/下属和弦、V级和弦/属和弦。先修知识:音名和唱名、音符与键盘的对应、升降号。后两节内容还需要:各个大小调中的音与音级、罗马数字。
长期股权投资通俗易懂式讲解学过保证会
第二节长期股权投资的后续计量 第四讲我们主要介绍了长期股权投资后续计量,教材权益法第二个问题:(二)投资损益确认中因在投资日被投资单位账面价值与公允价值不同,期末被投资单位实现净利润时,投资方怎么处理的问题。今天这一讲,我们介绍一下投资方与被投资方之间发生内部交易时,我们怎么调整被投资方的期末净利润的问题,其实说白了就是按照多少金额确认投资收益的问题。 首先,我们想一下,投资方与被投资方发生交易,投资方在期末因被投资方净利润确认投资收益时,为什么要调整他们之间的内部交易呢?其实很简单,我们只要站准角度就很容易理解,那么我们要站在什么角度看待这个问题呢?我们需要站在投资方与被投资方的外部看这个问题,既然投资方能够进行权益法核算,说明投资方能够共同控制或对被投资方有重大影响,那么投资方与被投资方可以说都是自己人。从报表使用者的角度,为了避免出现这种情况:也就是你投资方为了业绩的要求,或者你被投资为了业绩的要求,将自己的资产出售给对方,以增加自己的利润,这样出来的财务报表会误导财务报表使用者。所以为了避免出现这种情况,只要你们之间进行的内部交易,对于未实现的利润部分就要抵消。当然对于已经实现的部分就不要抵消了。什么叫未实现的损益,什么又叫已经实现的损益呢?对于双方都作为存货的资产来说,投资方将存货卖给被投资方,或者被投资方将存货卖给投资方,我们说了他们之间的交易是可能被控制的(因为投资方对被投资方可以共同控制或重大影响,也相当于自己人),只要他们之间的存货卖给他们之外的没有关联的第三方,就说明他们之间的交易产生的损益已经实现,如果另外一方买过来之后还没有全部卖给其他第三方,就有未实现的损益;如果对于一方是存货,另外一方购买后作为固定资产呢,这时候的损益要考虑两个方面了,一方面是出售存货产生的利润,另外一方面是作为固定资产使用的一方是需要计提折旧的,对于未实现损益部分计提的折旧,相当于是减少利润的。这两个数据相加就是这个交易对损益的影响。 知道了上述为什么抵消之后,我们再讲一讲,是按照100%抵消呢,还是按照持股比例抵消。通过上面的分析按道理来讲是应该100%抵消的,但是教材说权益法发生的内部交易未实现损益的抵消,只要按照投资方的持股比例抵消就可以。这个怎么理解呢?我们可以这样想:投资方与被投资方虽然都是自己人,但是毕竟不能完全控制,不像对子公司的投资,不能完全左右对方,投资方只能实现自己持股比例的影响,所以抵消的时候,只需要抵消未实现内部交易利润乘以持股比例的部分。 我们教材将投资方出售给被投资的交易叫顺流交易,将被投资出售给投资方的交易叫逆流交易。 下面我们来看一下教材的例题: 【教材例5-12】甲公司持有乙公司20%有表决权的股份,能够对乙公司施加重大影响。2×09年9月,甲公司将其账面价值为8 000 000元的商品以12 000 000 的价格出售给乙公司,乙公司将取得的商品作为管理用固定资产,预计使用寿命为10年,净残值为0。假定甲公司取得该项投资时,乙公司各项可辨认资产、负债的公允价值与其账面价值相同,两者在以前期间未发生过内部交易。乙公司2×09年实现净利润为20 000 000元。不考虑相关税费等其他因素影响。
pid通俗易懂讲解
最近从网上看到了一种对PID的解释,比较通俗易懂,也好记住,经过自己的整理后说明如下。 控制模型:你控制一个人让他以PID控制的方式走110步后停下。 (1)P比例控制,就是让他走110步,他按照一定的步伐走到一百零几步(如108步)或100多步(如112步)就停了。 说明: P比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady-state error)。 (2)PI积分控制,就是他按照一定的步伐走到112步然后回头接着走,走到108步位置时,然后又回头向110步位置走。在110步位置处来回晃几次,最后停在110步的位置。 说明: 在积分I控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。 (3)PD微分控制,就是他按照一定的步伐走到一百零几步后,再慢慢地向110步的位置靠近,如果最后能精确停在110步的位置,就是无静差控制;如果停在110步附近(如109步或111步位置),就是有静差控制。 说明: 在微分控制D中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。 自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳,其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例P”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势。这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例P+微分D(PD)控制器能改善系统在调节过程中的动态特性。
(完整版)(高人总结)长期股权投资通俗易懂式讲解
(高人总结)长期股权投资通俗易懂式讲解 第一节长期股权投资的范围和初始计量 一、长期股权投资的范围 教材在这个知识点讲了这么一个事情,那就是:企业进行的哪些投资属于长期股权投资。那我们从“长期股权投资”这几个字想一下,长期就意味着长期持有,那对于这样的投资,我们就在长期股权科目下核算。 教材说了下面三种投资属于长期股权投资: 1、对子公司的投资,即投资方能对被投资单位实施控制的权益性投资。(试想一下,都能够控制了,可想股权投资比例不小,应该是奔着长期去的。那控制又是什么概念呢,就是你说了算) 2、对合营企业投资,即投资方与其他合营方一同对被投资单位实施共同控制且对被投资单位净资产享有权利的 权益性投资。(试想一下,共同控制,可想股权投资比例也不小,应该是奔着长期去的。那共同控制又是什么概念呢,就是你和唯一的另一股东两个人商量好了,这个事情就可以定了) 3、对联营企业投资,即投资方对被投资单位具有重大影响的权益性投资(这个可以这样理解:我的意见对被投资方的经营决策有重大的影响,如果你去股票市场买股票,你能够对你买股票的这个公司经营有什么影响吗?所以有重大影响,也是长期持有了,投资不小了) 所以对上述范围只要掌握:我对被投资单位有控制(子公司),共同控制(合营企业),重大影响(联营企业),就需要在长期股权这里核算 二、长期股权投资初始计量 (一)企业合并形成的长期股权投资 企业合并,是指将两个或者两个以上单独的企业合并形成一个报告主体的交易或事项。(大家可能会有疑问:企业合并是什么意思呢?其实很简单,对于那些大集团公司(称为母公司),下面有很多子公司,那个集团公司的股东,年末要知道这个集团公司年末财务报表的数据是怎么样的,是不是要把给你公司的报表拿过来一个一个看啊?想想也不是,他们是要一个合并在一起的报表,这样一看就知道这个集团的经营状况了,这个就叫企业合并财务报表) 1 .同一控制下企业合并形成的长期股权投资 (同一控制下,就是说受同一个投资者控制。这个投资者下面有很多子公司,
中考定语从句讲解通俗易懂含图标式讲解和练习
中考定语从句讲解(通俗易懂,含练习题) 定语从句 请看下面的句子: I want to know the boy who is the tallest. 句子做定语修饰boy (一)概念: 定语从句:在复合句中修饰名词或代词的句子,叫定语从句。 先行词:被定语从句修饰的词叫先行词。 关系词:引导定语从句的词叫关系词。 (二)定语从句的分类 Ⅰ、限定性定语从句:从句不可少,没有它,先行词的意思不明确,主句也不完整。与先行词之间不用逗号。 :This is the book that/which I want. Ⅱ、非限定性定语从句:是对先行词的补充说明,没有它不会影响先行词或主句意思的完整性。从句一般用逗号同主句分开。 :Mr. Green, who is watching TV,is my uncle.
(三)(限定性)定语从句的结构 Mary is a girl who has long hair. 先行词关系词定语从句 关系代词关系副词 which, who, whom, whose, that where, when, why (四)定语从句的实质:二句合一 (合并条件:人物先行在句一,又占句二一席地) Mary is a girl. 合并为一个句子 She has long hair. 思路:留(保留先行词)-----舍(舍去与先行词互指的词)----替(用关系词代替舍去部分) Mary is a girl who/that has long hair. 请把下列句子二句合一 1. I saw the man.He closed the door
以通俗易懂的方式来讲解知识图谱相关的知识
以通俗易懂的方式来讲解知识图谱相关的知识 导读:从一开始的Google搜索,到现在的聊天机器人、大数据风控、证券投资、智能医疗、自适应教育、推荐系统,无一不跟知识图谱相关。它在技术领域的热度也在逐年上升。本文以通俗易懂的方式来讲解知识图谱相关的知识、尤其对从零开始搭建知识图谱过程当中需要经历的步骤以及每个阶段需要考虑的问题都给予了比较详细的解释。对于读者,我们不要求有任何AI相关的背景知识。 1. 概论 随着移动互联网的发展,万物互联成为了可能,这种互联所产生的数据也在爆发式地增长,而且这些数据恰好可以作为分析关系的有效原料。如果说以往的智能分析专注在每一个个体上,在移动互联网时代则除了个体,这种个体之间的关系也必然成为我们需要深入分析的很重要一部分。在一项任务中,只要有关系分析的需求,知识图谱就“有可能”派的上用场。 2. 什么是知识图谱? 知识图谱是由Google公司在2012年提出来的一个新的概念。从学术的角度,我们可以对知识图谱给一个这样的定义:“知识图谱本质上是语义网络(Semantic Network)的知识库”。但这有点抽象,所以换个角度,从实际应用的角度出发其实可以简单地把知识图谱理解成多关系图(Multi-relational Graph)。 那什么叫多关系图呢?学过数据结构的都应该知道什么是图(Graph)。图是由节点(Vertex)和边(Edge)来构成,但这些图通常只包含一种类型的节点和边。但相反,多关系图一般包含多种类型的节点和多种类型的边。比如左下图表示一个经典的图结构,右边的图则表示多关系图,因为图里包含了多种类型的节点和边。这些类型由不同的颜色来标记。 在知识图谱里,我们通常用“实体(Entity)”来表达图里的节点、用“关系(Relation)”
通俗易懂的讲解:二叉树是什么-华清远见
通俗易懂的讲解:二叉树是什么 本篇文章主要分几个部分,为大家通俗易懂的讲解:二叉树是什么。听到二叉树这个词的时候,是不是想到的就是某一个树呢?这里所讲的树可不是外面长在土地里的树,而是在计算机编程里的树! 一、二叉树的简介 在计算机科学中,二叉树是每个节点最多有两个子树的树结构。通常子树被称作“左子树”(left subtree)和“右子树”(right subtree)。二叉树常被用于实现二叉查找树和二叉堆。二叉树的每个结点至多只有二棵子树(不存在度大于2的结点),二叉树的子树有左右之分,次序不能颠倒。二叉树的第i层至多有2^{i-1}个结点;深度为k的二叉树至多有2^k-1个结点;对任何一棵二叉树T,如果其终端结点数为n_0,度为2的结点数为n_2,则n_0=n_2+1。一棵深度为k,且有2^k-1个节点的二叉树,称为满二叉树。这种树的特点是每一层上的节点数都是最大节点数。而在一棵二叉树中,除最后一层外,若其余层都是满的,并且最后一层或者是满的,或者是在右边缺少连续若干节点,则此二叉树为完全二叉树。具有n个节点的完全二叉树的深度为log2n+1。深度为k的完全二叉树,至少有2^(k-1)个节点,至多有2^k-1个节点。 二、树的基本概念简介 <1>树的定义 专业定义:(1)有且只有一个称为根的结点 (2)有若干不相交的子树,这些子树本身也是一颗树。 通俗讲解: (1)树由结点和边组成 (2)树中除根节点外,每一个节点都有一个父结点,但是可以用多个子节点。 (3)根结点没有父结点
<2>树中的专业术语 节点:父节点子节点(老子和儿子) 堂兄弟 度:结点拥有子树的个数 叶子节点:没有子节点的节点 边 : 一个节点到另一个节点的距离 树的深度:节点的层数,根节点默认为第一层。 有序:树的左右位置不能改变。 <3>树的分类 一般树:任意一个结点的子节点的个数不受限制,则称为一般树。(子节点可以有多个),如下图: