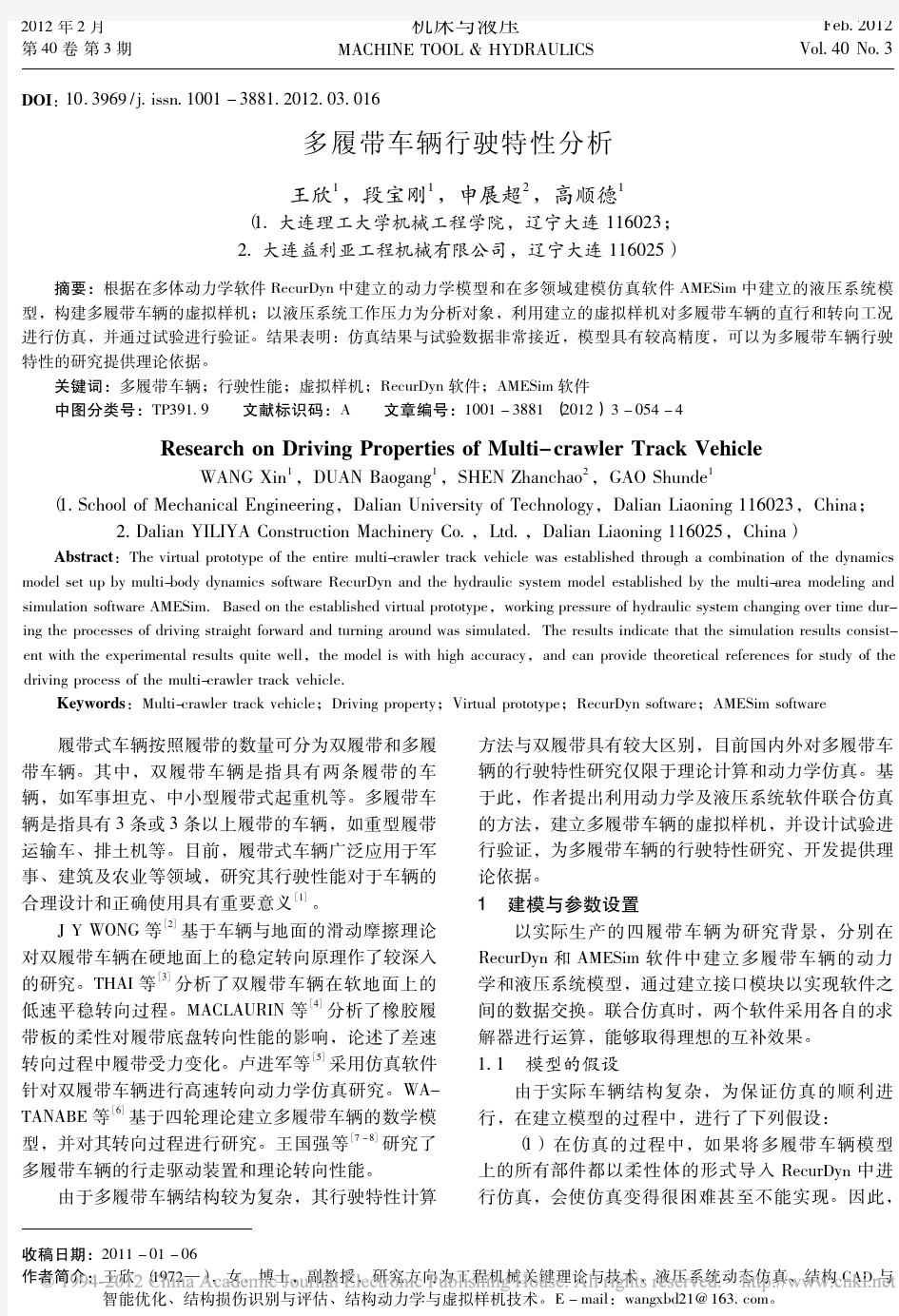
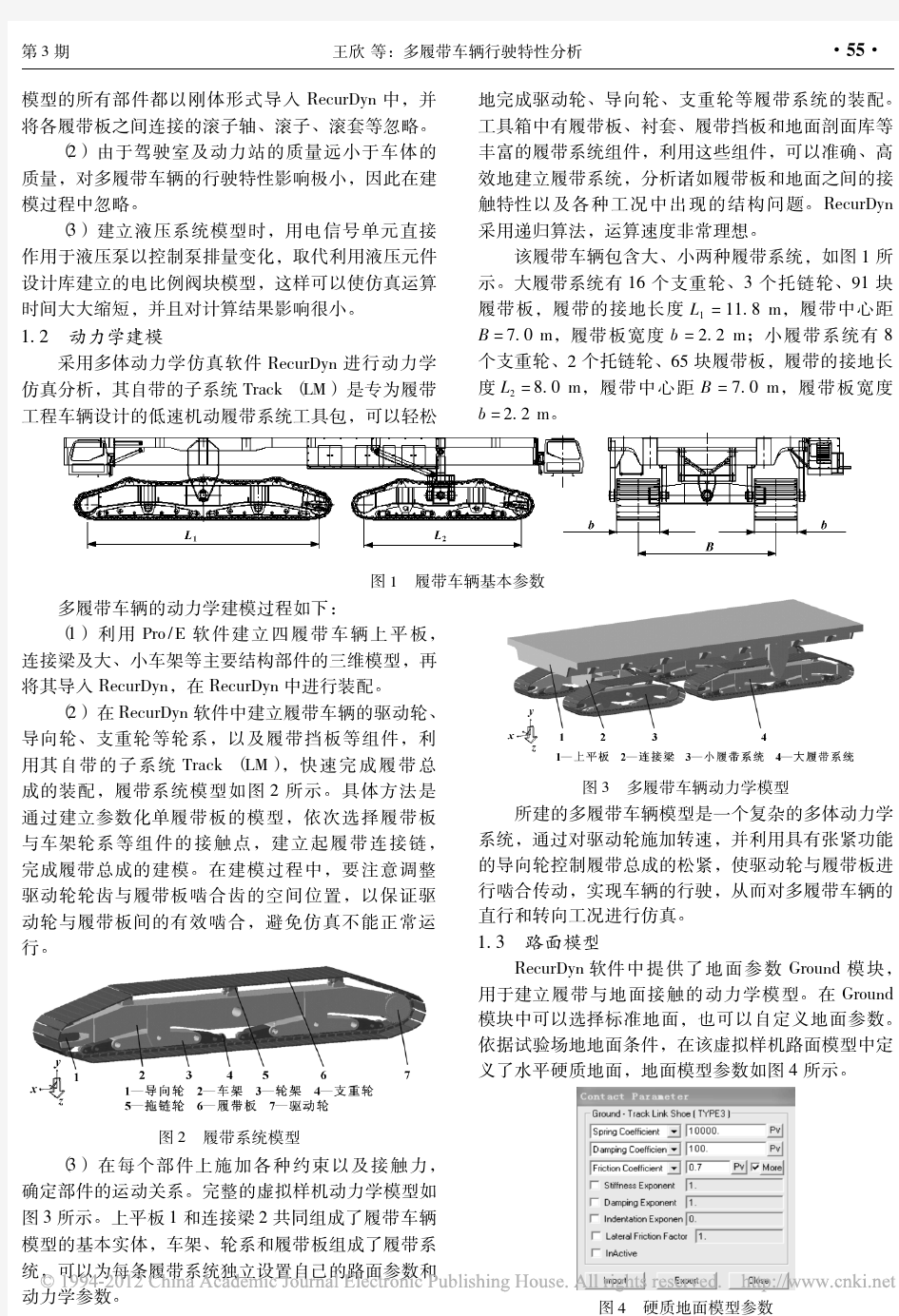
多履带车辆行驶特性分析
车辆概要设计说明书
目录 1 引言 (1) 1.1 编写目的 (1) 1.2 范围 (1) 1.3 定义 (1) 1.4 参考资料 (1) 2 总体设计 (2) 2.1 需求规定 (2) 2.2 运行环境 (7) 2.3 基本设计概念和处理流程 (7) 2.4 结构 (10) 2.5 功能需求与程序的关系 (11) 2.6 人工处理过程 (12) 2.7 尚未解决的问题 (12) 3 接口设计 (12) 3.1 用户接口 (12) 3.2 外部接口 (12) 3.3 内部接口 (12) 4 运行设计 (12) 4.1 运行控制 (12) 4.2 运行时间 (13) 5 系统数据结构设计 (14) 5.1 实体关系E—R图 (14) 5.2 表汇总 (14) 5.3 数据结构与程序的关系 (18) 6 系统出错处理设计 (19) 6.1 出错信息 (19) 6.2 补救措施 (19) 6.3 系统维护设计 (19)
1 引言 1.1 编写目的 满足***车辆维修保养管理。 1.2 范围 1、本软件的名称:***车辆维修保养管理系统。 2、本项目是为***车辆维修保养开发的。 1.3 定义 1、车辆基本信息:包括车牌号、车辆型号、大架号、生产厂家、购买日期,投 入使用日期。 2、车辆保养记录:能够记录车辆保养时间、保养内容、更换哪些部件、保养中 发现哪些问题、如何解决。 3、车辆维修记录:记录车辆维修时间,维修内容、更换部件(部件详细记录厂 家、型号、规格等)。 4、车辆统计报表:能够打印年、月度车辆维修统计表,年、月度车辆保养记录 表,年、月度零配件更换记录表。 5、系统设置:车辆的添加、更改、删除,用户的登录管理。 1.4 参考资料 [1] 朱印宏袁衍明.Dream Weaver CS3完美网页设计ASP动态网站设计篇.中 国电力出版社 [2] 许家珆.软件工程-----方法与实践.电子工业出版社 [3] 张跃廷王小科许文武https://www.360docs.net/doc/082404840.html,数据库系统开发完全手册.人民邮电出版 社
履带车辆设计计算说明书
整车参数计算 根据《GB/T 3871.2-2006 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算: 一、基本参数 二、质量参数的计算 1、整备质量M0为1825kg ; 2、总质量M总 M总=M0+M1+ M2 =1825+300+75=2200 kg M1载质量:300kg M2驾驶员质量:75kg 3、使用质量:M总=M0+ M2 =1825+75=1900 kg ..
.. 4、质心位置 根据《GB/T 3871.15-2006 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm 质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm 满载时:质心至后支承点的距离A0=605mm 质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm 5、稳定性计算 a 、保证拖拉机爬坡时不纵向翻倾的条件是: 00 h A >δ=0.7 (δ为滑转率) 空载时:830/450=1.84>0.7 满载时:605/546=1.11>0.7 满足条件。 b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是: h a 2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm 空载:12002450 ?=1.33>0.7 满载:12002546 ?=1.10>0.7 故拖拉机在空、满载运行中均能满足稳定性要求。 三、发动机匹配 根据《GB/T 1147.1-2007 中小功率燃机第1 部份:通用技术条件》标准要求进行计算: XJ —782LT 履带式拖拉机配套用云发动机,型号为:YN38GB2型柴油机,标定功率为
履带车辆与地面的作用
地面车辆力学是研究各种越野车辆(越野汽车、拖拉机、农业用汽车和工程用车辆、装甲车、坦克等)与地面、地形之间的关系,以改进车辆设计并提高其通过性的一门边缘学科。 目录 研究简史 应用 试验方法 发展 区别 编辑本段研究简史 人们认为,只要加大轮胎或履带的接地面积(如增加轮胎数、 军用越野货车 降低轮胎气压或加大轮胎或履带的尺寸)以减轻对地面的单位压力,并加大发动机功率以提高驱动力,车辆就能有良好的通过松软地面的能力。根据这一概念曾设计出3轴10轮(双后轴,每轴端各装双轮胎,10轮驱动)军用越野货车。在第二次世界大战中使用结果表明:在同样的轴荷下,双轮胎的行驶阻力加大,效果不佳。这就引起人们开始系统地研究轮胎、履带等在各种地面上的驱动力、阻力、下陷和滑转及滑移等的变化规律和相互关系,以解决越野车辆设计问题。1940年,德国R.伯恩斯坦用公式q =KZ1/2表示下陷量Z与单位接地面积压力q的关系(K为土壤变形模量),后来的研究者将公式普遍化为q=KZn。1944年,英国的E.W.E.迈克尔思韦特提出 公式 ,车辆的最大驱动力F,可以从库仑土壤剪切应力公式τ=c+q tgφ(c为土壤单位面积内聚力;φ为土壤内摩擦角)推导而得,即F=cA+qA tgφ(A 为接地面积)。在加拿大国防部工作的M.G.贝克在此基础上进一步研究了
土壤承载能力的稳定性,以及土壤塑性变形所引起的行驶阻力等问题,并 提出更精确而普遍的公式 公式 式中b为加载面积的宽度或半径;Kс、Kф分别为土壤内聚变形模量和摩 擦变形模量;K2、K1为实际测定的系数;Y max是τ的表达式右端括号内 部分的最大值,当此值达到最大时,即为库仑公式τ=c+q tgφ;徴为产生 剪应力τ的土壤变形量。此式主要用于粘性不大的土壤。1960年贝克将行走过程分解为加载和剪切过程,分别用承压仪和剪切仪测量土壤的Kс、Kф、n、c、φ和K 6个参数,这6个参数称为贝氏值。1961年,英国的A.R. 里斯提出适用于塑性土壤的τ值简化公式,K为土壤水平变形模量。贝克、 里斯等的研究和试验,使地面车辆力学由经验和直接试验阶段进入了试验 与理论结合较密切的半经验阶段。现代有的研究者尝试从土壤力学的基本 理论出发来分析机器土壤力学关系。如里斯等认为英国剑桥大学土壤力学 小组提出的土壤临界状态理论已使土壤应力和孔隙变化相联系,对研究滑 转变形很适用,很有发展前途。另外,还有借用流变学理论建立的土壤流 变学模型等。贝克首先提出地面车辆力学理论,建立了试验方法,1956年 出版了有关地面车辆力学的第一本专著《陆用车辆行驶原理》。他被公认 为这一学科的创立者。 1961年,美国和意大利陆军在都灵召开第一次国际性地面车辆力学学 术会议。1962年,成立国际地面车辆系统学会。中国从60年代开始这一学科的研究,主要注意水田拖拉机和耕作机械设计,研制水、旱田土壤参数 测量仪器,研究水田土壤的流变性质和土壤在行走机构的金属上粘附现象。1982年成立了地面机械系统研究会。 编辑本段应用 用土壤车辆力学的基本公式可以计算出车辆在不同的载荷和滑转系数 下的驱动力、下陷量和运动阻力,并推导出一些重要的新概念。例如,在 沙地(内聚力c=0)上车辆的最大驱动力只与其重量W(=qA)有关,而与接 地面积A无关;在泥浆(摩擦角φ=0)上最大驱动力只与接地面积A有关,而与重量W无关。又如对于接地面积A,如宽度大而长度小,则容易出现滑转,行驶效率不高。贝克还从动物的运动方式和相应的能量消耗对比推论, 认为列车式是越野车辆的合理的车辆形态。根据这一理论研制出一些新车型,如在雪地行驶的囊式轮胎列车,在沼泽地行驶的无腹式履带车和间隔 式履带板,螺旋推进式汽车,在月球上行驶的月球车(MO-LAB)等。在中国, 利用这一理论研制出机耕船、水田拖拉机等。
公司OA系统概要设计说明书
[天泰投资集团办公自动化] 概要设计说明书 王伟 2013年7月
概要设计说明书 引言 1.1编写目的 信息化是当今世界经济和社会发展的大趋势。推进办公系统的信息化建设,对于提高现代化管理水平,提高工作效率,都具有重要意义。为了适应国际形势和公司发展的需要,必须加快办公系统信息化的发展。 对于天泰投资集团,如何充分、快捷、有效地利用企业外的大量信息,为企业的发展服务,提高企业的工作效率,是企业需要充分考虑的问题之一。随着企业规模的扩大以及服务容和办公设施的现代化,这种情况日益突出。同时为了提高单位的日常办公效率,减轻手工劳动强度,使单位的日常运营纳入高效而快捷的轨道,就必须利用现代的信息手段。现代的信息技术优势在于对信息的处理高效而精确,可以充分实现信息的共享和传输,及时地反映企业办公的变动情况,完善办公调度,提高企业服务质量,进而实现企业经营管理的信息化、科学化。 充分利用现代的信息技术,是提高企业竞争力的必要手段。天泰投资集团计划建设的办公自动化系统将以先进的信息技术为依托,通过建立全局八个部门的信息网络,全面提高办公效率,并做到信息传输自动化、公共服务远程化、公文交换无纸化、管理决策网络化,实现全局办公系统全面信息化。 本说明书给出天泰公司办公自动化系统的设计说明,包括最终实现的软件必须满足的功能、性能、接口和用户界面、附属工具程序的功能以及设计约束等。 目的在于: ?为编码人员提供依据;
?为修改、维护提供条件; ?项目负责人将按计划书的要求布置和控制开发工作全过程; ?项目质量保证组将按此计划书做阶段性和总结性的质量验证和确认。 本说明书的预期读者包括: ?项目开发人员,特别是编码人员; ?软件维护人员; ?技术管理人员; ?执行软件质量保证计划的专门人员; ?参与本项目开发进程各阶段验证、确认以及负责为最后项目验收、鉴定提供相应报告的有关人员。 ?合作各方有关部门的负责人;项目组负责人和全体参加人员。 1.2定义 本项目开发的软件,约定: 中文全称:天泰投资集团办公自动化系统 中文别称: OA 英文全称: OA 本报告用到的术语符合国家标准《软件工程术语(GB/T11475-1995)》。 参考资料 与本文直接相关的国家标准包括:(中国标准 1996年) GB8566-1995 软件生存期过程 GB8567-88 计算机软件产品开发文件编制指南 GB9385-88 计算机软件需求说明编制指南
履带车辆设计计算说明
履带车辆设计计算说明Document number : PBGCG-0857-BTDO-0089-PTT1998
整车参数计算 根据《GB/T农业拖拉机试验规程第2部份:整机参数测量》标准要求进行计算: 一、基本参数 二. 质量参数的计算 1、整备质量Mo为1825kg ; 2、总质量M总 M 总=MO+M1+ M2 =1825+300-75=2200 kg 血载质疑:300kg M2驾驶员质量:75kg 3、使用质量:H 总二M0+ M2 =1825+75=1900 kg 4、质心位置
根据《GB/T 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0二830mm 质心至前支承点的距离B 二610mm 质心至地面的距离h0二450mm 满载时:质心至后支承点的距离A0二605mm 质心至前支承点的距离B 二812mm 质心至地面的距离h0二546mm 5、稳左性计算 a 、保证拖拉机爬坡时不纵向翻倾的条件是: %> fi =(§为滑转率) 空载时:830/450= > 满载时:605/546二〉 满足条件。 b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是: /2/1 > =0. 7 a —轨距,a 二1200mm h —质心至地面距离mm 空载:加〉 故拖拉机在空、满载运行中均能满足稳左性要求。 三、发动机匹配 根据《GB/T 中小功率内燃机第1部份:通用技术条件》标准要求进行计算: XJ-782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标左功 率为57kW/h,转速为2600r/min. (1) 最髙设讣车速鼻弐km/h,所需功率: 尸z ?二丄(巴+几)kw n 满载: 1200 _、 2x546
履带车辆的转向理论
一、双履带车辆的转向理论 对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的。 (一)双履带式车辆转向运动学 履带车辆不带负荷,在水平地段上绕转向轴线O作稳定转向的简图,如图7-12所示。从转向轴线O到车辆纵向对称平面的距离R,称为履带式车辆的转向半径。 以代表轴线O在车辆纵向对称平面上的投影,的运动速度代表车辆转向时的平均速度。则车辆的转向角速度为: 图7-12 履带式车辆转向运动简图 (7-37) 转向时,机体上任一点都绕转向轴线O作回转,其速度为该点到轴线O的距离和角速度的乘积。所以慢、快速侧履带的速度和分别为: (7-38) 式中:B—履带车辆的轨距。
根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动。 由上可得: (二)双履带式车辆转向动力学 1、牵引平衡和力矩平衡 图7-13给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径R作低速稳定转向时的受力情况(离心力可略去不计)。 转向行驶时的牵引平衡可作两点假设: (1)在相同地面条件下,转向行驶阻力等于直线行驶阻 力,且两侧履带行驶阻力相等,即: (2)在相同的地面条件和负荷情况下,相当于直线行驶的有效牵引力,即:
图7-13 转向时作用在履带车辆上的外力 所以回转行驶的牵引平衡关系为: (7-39) 设履带车辆回转行驶时,地面对车辆作用的阻力矩为,在负荷作用下总的转向阻力矩为: (7-40)式中:—牵引点到轴线的水平距离。 如前所述履带车辆转向是靠内、外侧履带产生的驱动力不等来实现的,所以回转行驶时的转向力矩为: (7-41)稳定转向时的力矩平衡关系为: (7-42) 为了进一步研究回转行驶特性,有必要对内、外侧驱动力分别加以讨论。由上可得: (7-43) 式中:为在作用下,土壤对履带行驶所增加的反力,亦即转向力,作用方向与驱动力方向相同,以表示。 变形得式: (7-44)
概要设计说明文档
概要设计说明文档
《智慧后勤支撑平台》概要设计说明书 1 引言 1.1 编写目的 本设计书是高校固定资产管理项目程序的研发概要设计,将项目开发进程中或者项目结束后提供给双方人员使用,同时也可以作为实施后期的维护人员使用。 1.2 项目背景 作为软件开发的前期文档,可以帮助程序设计人员和管理人员提供清晰的设计思路,在软件开发后期的维护阶段也起到至关重要的作用。 委托单位:上海明略企业管理咨询有限公司 开发单位:上海明略企业管理咨询有限公司负责人:白老师 随着我国世界影响力的提升,国内承办的世界级重要活动越来越多,而稳定、高效的电力保障是重要活动顺利举办的基础。保电后勤工作作为电力保障的支撑部门,在重要活动保电行动中承载着重要的使命。为此,作为世界互联网大会·乌镇峰会的电力保障责任单位嘉兴供电公司,以往届保电后勤保障经验为基础、先进的后勤知识为指引,提出利用互联网技术,为重要活动保电提供全方位、及时的后勤保障,搭建后勤支撑平台,提升保电后勤管理效率,优化后勤专业水平,实现保电后勤保障的智慧化支撑,从而为重要活动保电的顺利进行提供保障。 1.3 定义 B/S :(Browser/Server结构)结构即浏览器和服务器结构。 需求:用户解决问题或达到目标所需的条件和功能;系统或系统部要满足合同、标准,规范或其他正式文档所需具有的条件及权能。 1.4 参考资料 《国家标准软件开发文档规范》《软件开发流程》 2 任务概述 2.1 目标 智慧后勤支撑平台主要功能有:资源信息管理与移动端查看,相关手册的维护,报表数据的查看与统计,广告管理,消息管理,权限设置,系统日志等功能。 2.2 运行环境 ·主机: PC兼容机内存8GB以上,显示分辨率1336*768以上
履带车辆设计计算说明
履带车辆设计计算说明 Document number:PBGCG-0857-BTDO-0089-PTT1998
整车参数计算 根据《GB/T 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数 二、质量参数的计算 1、整备质量M0为1825kg ; 2、总质量M总 M总=M0+M1+ M2 =1825+300+75=2200 kg M1载质量:300kg M2驾驶员质量:75kg 3、使用质量:M总=M0+ M2 =1825+75=1900 kg 4、质心位置
根据《GB/T 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm 质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm 满载时:质心至后支承点的距离A0=605mm 质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm 5、稳定性计算 a 、保证拖拉机爬坡时不纵向翻倾的条件是: 00 h A >δ= (δ为滑转率) 空载时:830/450=> 满载时:605/546=> 满足条件。 b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是: h a 2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm 空载:12002450 ?=> 满载:12002546 ?=> 故拖拉机在空、满载运行中均能满足稳定性要求。 三、发动机匹配 根据《GB/T 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算: XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.
公司OA系统概要设计说明书
公司OA系统概要设 计说明书 1
[山西天泰投资集团有限公司办公自动化] 概要设计说明书 王伟 7月 1
概要设计说明书 引言 1.1编写目的 信息化是当今世界经济和社会发展的大趋势。推进办公系统的信息化建设, 对于提高现代化管理水平, 提高工作效率, 都具有重要意义。为了适应国际形势和公司发展的需要, 必须加快办公系统信息化的发展。 对于山西天泰投资集团有限公司, 如何充分、快捷、有效地利用企业内外的大量信息, 为企业的发展服务, 提高企业的工作效率, 是企业需要充分考虑的问题之一。随着企业规模的扩大以及服务内容和办公设施的现代化, 这种情况日益突出。同时为了提高单位的日常办公效率, 减轻手工劳动强度, 使单位的日常运营纳入高效而快捷的轨道, 就必须利用现代的信息手段。现代的信息技术优势在于对信息的处理高效而精确, 能够充分实现信息的共享和传输, 及时地反映企业办公的变动情况, 完善办公调度, 提高企业服务质量, 进而实现企业经营管理的信息化、科学化。 充分利用现代的信息技术, 是提高企业竞争力的必要手段。山西天泰投资集团有限公司计划建设的办公自动化系统将以先进的 2
信息技术为依托, 经过建立全局八个部门的信息网络, 全面提高办公效率, 并做到信息传输自动化、公共服务远程化、公文交换无纸化、管理决策网络化, 实现全局办公系统全面信息化。 本说明书给出山西天泰公司办公自动化系统的设计说明, 包括最终实现的软件必须满足的功能、性能、接口和用户界面、附属工具程序的功能以及设计约束等。 目的在于: ?为编码人员提供依据; ?为修改、维护提供条件; ?项目负责人将按计划书的要求布置和控制开发工作全过程; ?项目质量保证组将按此计划书做阶段性和总结性的质量验证和确认。 本说明书的预期读者包括: ?项目开发人员, 特别是编码人员; ?软件维护人员; ?技术管理人员; ?执行软件质量保证计划的专门人员; 3
2-2 履带车辆的转向液压传动.
情境二复杂机械的液压传动 任务2 履带车辆的转向液压传动 一、结构与工作情况 1、结构 外形图: 履带式与轮式行驶系统相比,有如下特点:一是支承面积大,接地比压小。因此履带车辆适合在松软或泥泞场地进行作业,下陷度小,滚动阻力也小,通过性能较好。二是履带支承面上有履齿,不易打滑,牵引附着性能好,有利于发挥较大的牵引力。三是结构复杂,重量大,运动惯性大,缓冲性能差,“四轮一带”磨损严重,造价高,寿命短。因此履带车辆的行驶速度不能太高,机动性能也较差。四是履带车辆还可在高温场地工作,加之其“低比压”、“大牵引力”的突出优点是轮式车辆无法代替的。 2、转向系统图: 发动机的功率分两路传 递,一路通过齿轮传到变速 机构,由车辆根据需要换入 所需挡位;另一路由变量泵 定量马达机组传到两侧两个 汇流行星排的太阳轮。然后, 通过汇流行星排将两路动力 汇合后,分别通过两侧汇流 行星排的行星架输到两侧履 带。因两侧太阳轮转动方向 相反,所以输出到两侧履带 的转速大小不相等,造成两 侧履带产生速差而使车辆转 向。 二、转向液压传动系统 1、传动系统图: 图5-1履带车辆-挖掘机的外形图 图5-2履带车辆转向系统
如图5-3,该系统采用的是双向变量泵和定量马达组成的容积式调速方式,通过调节液压泵的排量来改变液压马达的输出转速,以实现履带车辆的双向无级转向。它主要由变量柱塞泵、补油齿轮泵、定量柱塞马达、换向阀、单向阀、溢流阀、油箱、油管和滤油器等元件组成。 2、工作原理 当发动机带动变量泵2转动时,液压泵将发动机的机械能转换 为液压能,输出压力油,驱动马达 10转动。调节变量柱塞泵斜盘摆角 的大小和方向,即改变液压泵输出 流量的大小和液流的方向,从而使 马达输出不同大小和方向的转速。 马达回油与变量泵的吸油口相通, 形成闭式回路。 由于泵、马达组成的是闭式液压回路,为了补充闭式回路中因泄漏而造成的油液损失,系统中设有补油系统,如齿轮泵1、单向阀4和5、定压溢流阀11等;为了使补油系统循环并带走变量泵和定量马达工作中因功率损失而产生的热量,控制油液的温度,系统中设有换向阀8和背压阀9;为防止液压系统过载,还设有安全溢流阀6和7。 三、柱塞泵 柱塞泵是依靠柱塞在缸体内往复运动,使密封容积产生变化来实现吸油和压油的。由于柱塞和缸体内孔均为圆柱表面,因此加工方便、配合精度高、密封性能好、容积效率高,同时,柱塞处于受压状态,能使材料的强度性能充分发挥,只要改变柱塞的工作行程就能改变泵的排量,所以柱塞泵具有压力高、结构紧凑、效率高、流量调节方便等优点。由于单柱塞泵只能断续供油,因此作为实用的柱塞泵,常以多个单柱塞泵组合而成。根据其排列方向不同可分为径向柱塞泵和轴向柱塞泵。径向柱塞泵径向尺寸大,结构较复杂,自吸能力差,且配油轴受到径向不平衡液压力的作用,易于磨损,这些都限制了它的转速和压力的提高, 因此 图5-3 履带车辆转向液压系统1-液压泵 2-变量泵 4、5-单向阀向阀 6、7-安全溢流阀 8-换向阀9-背压阀 10-双向马达 11-溢流阀 图5-4 轴向柱塞泵的工作原理 1-斜盘 2-滑履 3-压板 4、8套筒 5-柱塞 6-弹簧 7-缸体 9-转轴 10-配油盘
网站概要设计说明书(模板)
网站概要设计说明书(模板) 1引言 (2) 1.1编写目的 (2) 1.2背景 (2) 1.3定义 (2) 1.4参考资料 (3) 2总体设计 (3) 2.1需求规定 (3) 2.2运行环境 (4) 2.3基本设计概念和处理流程 (4) 2.4结构 (7) 2.5功能器求和程序的关系 (8) 2.6人工处理过程 (9) 2.7尚未问决的问题 (9) 3接口设计 (9) 3.1学生接口 (9) 3.2外部接口 (9) 3.3内部接口 (10) 4运行设计 (10) 4.1运行模块组合 (10) 4.2运行控制 (10) 4.3运行时间 (10) 5系统数据结构设计 (10) 5.1逻辑结构设计要点 (10) 5.2物理结构设计要点 (12) 5.3数据结构和程序的关系 (12) 6系统出错处理设计 (12) 6.1出错信息 (12) 6.2补救措施 (12) 6.3系统维护设计 (12)
1引言 本说明书为“XXXX网站系统”的概要设计说明书,概要阐述了对学生所提出需求的设计方案,对系统中的各项功能需求、技术需求、实现环境及所使用的实现技术进行了明确定义。同时,对软件应具有的功能和性能及其他有效性需求也进行了定义。此外,本说明书还明确了系统的数据结构和软件结构,还将给出内部软件和外部系统部件之间的接口定义,各个软件模块的功能说明,数据结构的细节以及具体的装配要求。 1.1编写目的 ●编写本说明书的目的是: 1.为编码人员提供依据; 2.为修改、维护提供条件; 3.项目负责人将按计划书的要求布置和控制开发工作全过程; 4.项目质量保证组将按此计划书做阶段性和总结性的质量验证和确认。 ●本说明书的预期读者包括: 1.项目开发人员,特别是编码人员; 2.软件维护人员; 3.技术管理人员; 4.执行软件质量保证计划的专门人员; 5.参和本项目开发进程各阶段验证、确认以及负责为最后项目验收、鉴定提供相应报 告的有关人员; 6.合作各方有关部门的负责人; 7.项目组负责人和全体参加人员。 1.2背景 a.项目名称:XXXX网站系统项目 b.系统名称:XXXX网站系统 c.项目提出者:XXXX d.系统学生:XXXX、XXXX、XXXX 1.3定义 总体设计:对有关系统全局问题的设计,也就是设计系统总的处理方案,又称系统概要设计。它包括:计算机配置设计、系统模块结构设计、数据库和文件设计、代码设计以及系统可靠性和内部控制设计等内容。 运行设计:是针对建筑或环境的特定要求,以活动发生地点的建筑或场地设计及现状
履带车辆主动轮减速装置设计
摘要 在履带车辆中,减速传动装置是重要的组成部分之一,本文主要以主动轮减速器设计为主,在履带车辆中主动轮减速器起着重要的作用。主要的作用:降低电动机传动主动的转速,并增大传递到主动轮的转矩,是履带车辆有足够的动力性,满足履带车辆起步、加速、通过性。 本设计为履带车辆主动轮减速器设计,主要介绍齿轮是减速器的选择以及传动方案的选择。为适应履带车的行驶条件需要,通过履带车辆的车重和最大行驶速度,计算出履带车辆行驶中所需的最大功率最大扭矩。根据最大功率计算总传动比,是总传动比能达到减速比的要求,并进行传动比的分配和确定各轮齿齿数和尺寸,以及确定选择使用单级传动和二级传动。根据计算要求确定输入输出轴轴颈计算和轴段长度的计算以及轴的校核。最后进行密封件的选择和轴的工艺分析。选择合适的密封件并满足设计要求,另外轴在加工时要有一定的技术要求,加工后的轴应满足技术和设计要求。 关键词:减速传动装置;传动比;传动比;校核;密封件
ABSTRACT Caterpillar vehicles, the slowdown in the transmission device is an important part of this paper mainly active wheel reducer design is given priority to, in active wheel reducer of caterpillar vehicle plays an important role. Main function: reduce the speed of the motor drive, and increase initiative to deliver the torque, active wheel is tracked vehicles have enough power to meet tracked vehicles start, accelerate, through sex. This design for tracked vehicles driving gear reducer design, mainly introduces the option and is reducer gear transmission options. Through the caterpillar vehicle weight of the car and maximum speeds of caterpillar vehicle, calculate the maximum power required. According to the maximum power calculating total ratio, and the distribution of transmission ratio, and confirm the pinion gear and dimension. And input/output shaft shaft neck calculation and shaft length calculation, and the axis of dynamicrigidity. On the classification of the shaft seal process analysis. Choose appropriate sealing parts and meet the design requirements, another shaft in process must have certain technical requirements, the processed axis should meet the technical and design requirements. This design closely combining the most mature modern tracked vehicles of technology. Keywords:Slow Transmission Device; Ratio;Distribution Ratio ; Check; Seals
履带车辆的转向理论
履带车辆的转向理论 一、双履带车辆的转向理论 对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的。 (一)双履带式车辆转向运动学 履带车辆不带负荷,在水平地段上绕转向轴线O 作稳定转向的简图,如图7-12所示。从转向轴线O 到车辆纵向对称平面的距离R ,称为履带式车辆的转向半径。 以T O 代表轴线O 在车辆纵向对称平面上的投影,T O 的运动速度v '代表车辆转向时的平均速度。则车辆的转向角速度Z ω为: 图7-12 履带式车辆转向运动简图 R v Z ' = ω (7-37)
转向时,机体上任一点都绕转向轴线O 作回转,其速度为该点到轴线O 的 距离和角速度Z ω的乘积。所以慢、快速侧履带的速度1 v '和2v '分别为: Z Z Z Z B v B R v B v B R v ωωωω5.0)5.0(5.0)5.0(2 1 +'=+='-'=-=' (7-38) 式中:B —履带车辆的轨距。 根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动。 由上可得: B R B R v v 5.05.021 +-='' (二)双履带式车辆转向动力学 1、牵引平衡和力矩平衡 图7-13给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径R 作低速稳定转向时的受力情况(离心力可略去不计)。 转向行驶时的牵引平衡可作两点假设: (1) 在相同地面条件下,转向行驶阻力等于直线行驶阻 力,且两侧履带行驶阻力相等,即: f f f F F F 5.021='='
公共自行车概要设计说明书
1引言 (2) 1.1编写目的 (2) 1.2背景 (2) 1.3定义 (2) 1.4参考资料 (2) 2总体设计 (3) 2.1需求规定 (3) 2.2运行环境 (3) 2.3基本设计概念和处理流程 (3) 2.4结构 (4) 2.5功能器求与程序的关系 (4) 2.6人工处理过程 (4) 2.7尚未问决的问题 (4) 3接口设计 (4) 3.1用户接口 (4) 3.2外部接口 (4) 3.3内部接口 (5) 4运行设计 (5) 4.1运行模块组合 (5) 4.2运行控制 (5) 4.3运行时间 (5) 5系统数据结构设计 (5) 5.1逻辑结构设计要点 (5) 5.2物理结构设计要点 (7) 5.3数据结构与程序的关系 (8) 6系统出错处理设计 (8) 6.1出错信息 (8) 6.2补救措施 (8) 6.3系统维护设计 (9)
概要设计说明书 1引言 1.1编写目的 本设计书是公共自行车信息管理系统项目程序的研发概要设计,将项目开发进程中或者项目结束后提供给双方人员使用,同时也可以作为实施后期的维护人员使用。 1.2背景 《公共自行车信息管理系统2.0概要设计说明书》作为软件开发的前期文档,可以帮助程序设计人员和管理人员提供清晰的设计思路,在软件开发后期的维护阶段也起到至关重要的作用。 委托单位:xx公共自行车管理公司开发单位:xx工作室负责人:全伟轩 近几年,随着公共自行车事业的蓬勃发展,摩拜、ofo等新兴租车企业也在积极的维护骑自行车,与此对立的是公共自行车信息、安全管理的缺乏,公共自行车需要更好的维护与管理,为了公共自行车管理公司能够更好地管理学校设备,我们工作室做了一个公共自行车信息管理系统,为公共自行车信息管理公司管理和公共自行车带来了方便与高效。 1.3定义 B/S :(Browser/Server结构)结构即浏览器和服务器结构。 需求:用户解决问题或达到目标所需的条件和功能;系统或系统部要满足合同、标准,规范或其他正式文档所需具有的条件及权能。 1.4参考资料 《国家标准软件开发文档规范》 《软件开发流程》,清华大学出版社,2005年1月版。
最新汽车销售管理系统《概要设计说明书》资料
文档编号: LMS—2 版本号: V1.0 文档名称:概要设计说明书 项目名称:轿车销售管理信息系统 项目负责人:王江丰(执笔人)、陈学懂、赵玉宽、何阳、李一锋、 羊克安 编写:2010年5月25日 校对:XXXX年XX月XX日 审核:XXXX年XX月XX日 批准:XXXX年XX月XX日 开发单位:至南股份有限公司
概要设计说明书 1.引言 (3) 1.1编写目的 (3) 1.2项目背景 (3) 1.3定义 (3) 1.4参考资料 (3) 2.任务概述 (3) 2.1目标 (3) 2.2运行环境 (4) 2.3需求概述 (4) 2.4条件与限制 (5) 3.总体设计 (5) 3.1处理流程 (5) 3.2总体结构和模块外部设计 (11) 3.3功能分配 (17) 4.接口设计 (17) 4.1外部接口 (17) 4.2内部接口 (31) 5.数据结构设计 (31) 5.1逻辑结构设计 (32) 5.2物理结构设计 (39) 5.3数据结构与程序的关系 (39) 6.运行设计 (40) 6.1运行模块的组合 (40) 6.2运行控制 (40) 6.3运行时间 (41) 7.出错处理设计 (41) 7.1出错输出信息 (41) 7.2出错处理对策 (41) 8.安全保密设计 (41) 9.维护设计 (41)
1.引言 1.1编写目的 根据《需求规格说明书》,在仔细考虑讨论之后,我们又进一步对《轿车销售管理信息系统》软件的功能划分、数据结构、软件总体结构有了进一步的认识。我们把讨论的结果记录下来,作为概要设计说明书,并作为进一步详细设计软件的基础。 1.2项目背景 开发软件名称:轿车销售管理信息系统 项目开发者:信息工程学院计算机科学系071班“轿车销售管理信息系统”开发小组:王江丰(执笔人)、陈学懂、羊克安、何阳、赵玉宽、李一锋 用户单位:至南股份有限公司 1.3定义 轿车销售管理系统实现对轿车信息、客户信息和员工信息的管理。从客户咨询、订购,到签定购销合同、交款、提车等多个销售环节上,系统提供了严密的跟踪管理服务,对车辆库存、财务管理、业务分析都提供了一套科学的管理方法。 1.4参考资料 《软件工程导论》张海藩 《SQL Server 2000数据库应用教程》邱李华李晓黎张玉花等编著 《Visual Basic程序设计简明教程》龚沛曾陆慰民杨志强等编著 2.任务概述 2.1目标 《轿车销售管理信息系统》针对的用户是单个中小型轿车销售公司,轿车的种类和数量较少,客户的数量和来源受到一定的限制。相应的需求有: 1.能够存储一定数量的轿车信息,并方便有效的进行相应的轿车数据操作和管理,这主要包括:
履带车辆设计计算说明书
整车参数计算 根拯《GB/T 3871.2-2006农业拖拉机试验规程第2部份:整机参数测量》标准要求进行计算: 一. 基本参数 二、质量参数的计算 1、整备质量Mo为1825kg ; 2、总质量懸 M总=MO+M1+ M2 二1825+300+75二2200 kg 血载质量:300kg M2驾驶员质量:75kg 3、使用质M: M总二M0+ M2 =1825+75=1900 kg 4、质心位置
根据《GB/T 3871. 15-2006农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0二830mm 质心至前支承点的距离B二610mm 质心至地而的距离h0=450mm 满载时:质心至后支承点的距离A0二605mm 质心至前支承点的距离B二812mm 质心至地而的距离h0二546mm 5、稳左性计算 a、保证拖拉机爬坡时不纵向翻倾的条件是: % > 戶.7 (§为滑转率) 空载时:830/450=1. 84>0.7 满载时:605/546=1.11 >0.7 满足条件。 b、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是: /2/1 > =0. 7 a—轨距,a二1200mm h—质心至地而距离mm 空载:丿2烈八二1?33>0?7 2x450 满载:J???二I K)〉。.? 2x546 故拖拉机在空、满载运行中均能满足稳是性要求。 三、发动机匹配 根据《GB/T 1147. 1-2007中小功率内燃机第1部份:通用技术条件》标准要求进行计算: XJ-782LT履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标圧功率为57kW/h,转速为2600r/min.
军用履带车辆转向机构发展综述(1)
万方数据
万方数据
同 L-__-____I ●一论塌 向联轴节滑转使得机械转向的动力可由变速之后的汇流排齿圈输送,车辆获得一个规定的转向半径。单向联轴节可自动使液压和液压机械转向两阶段及时平稳衔接而不出现空程或重叠,这是该方案特殊结构的优点之一。 图6为俄罗斯学者提出的在双侧变速传动基础上增加液压转向的改进方案。其工作原理是当液压转向达到其最小转向半径时通过降低低速侧排档以继续机械转向。 3.3动静液复合转向机构 该型转向机构的特点是利用液力偶合器提供功率以解决液压泵和马达功率不足的问题。一般条件下,液力助力偶合器空转,转向由泵和马达实现。当液压元件功率不能满足困难地面和小半径转向的需要时,外界阻力使液压系统高压升高到额定最高油压,偶合器开始为转向提供助力矩。当总转向力矩超过外阻力矩时,油压回落,偶合器逐渐停止工作。该类方案应用到了豹Ⅱ坦克的HswL一354、AMx一30、黄鼠狼步兵战车等多种车辆上。该方案可以实现全程无级转向,但箱体结构和控制系统复杂,转向效率不高。 图7为应用于豹Ⅱ坦克的1100kw的HSwL一354传动简图。 4电传动 电传动将发动机输出能量转化为电能,再将电能转化成机械能,借助电能转换和控制技术实现动力无级传递。以电传动为基础的全电战斗车辆具有强大的越野机动性、最适宜的燃油消耗、便于保障和部署等诸多优点,成为新一代装甲车辆发展的新方向。美国的M113电传动装甲输送车、88&20吨的高级混合传动电驱动演示车、 18l机械工程师2007年第5期装有电传动系统的“悍马”车、荷兰的44&12吨轮式全电战车等初步显示了电传动的优势。图8为美国2010年前准备装备的全电式战斗车。 5转向机构未来的发展 (1)以双流传动静液转向为基础的履带车辆综合传动,综合了机械传动、液压传动的优点。为提高液压转向的功率采取了多种途径。形成了多种类型的转向机构,实现了一定区间内无级转向的目标。液压泵和马达是无级转向系的核心部件。随着泵和马达功率及效率的提高和联体泵一马达技术的逐步成熟,可以预见静液传动及转向技术必将在重型履带车辆上得到广泛的应用。 (2)近年来新发展的多段液压机械双流无级传动具有以小功率液压元件传递大功率特性、高效率特性和可控的无级调速特性等优点。该型机构应用于转向可实现全程的无级转向功能。美国的三段式液压机械无级传动装置HMPT一500、德国zF公司开发的SHL一5000液压机械综合传动装置、日本小松研发的四段式HsMT液压机械传动装置以其传递功率大、效率高、无级变速和全程无级转向等优良|生能突显了在重型履带车辆上应用的优势。 (3)电传动技术作为传动系统的一个发展方向有巨大的发展潜力,随着电机、电力电子和控制技术的飞速发展,电传动逐步取代现有动力传动系统将成为可能。 [参考文献] [1]刘修骥.车辆传动系统分析[M]北京:国防工业出版社,1998:扣15.[2]W.MerhofE.M.Hackbarth.履带车辆行驶力学[M].北京:国防工业出版社,】989:165—185. [3]J.Y.w0NG.TheoryofGroundVehicles[M].NewYorkwily&Sons。2001:1lO一145. [4]胡纪滨.多段液压机械无级传动的动态特性研究[D].北京:北京理工大学。2003. [5]吴绍斌.遥控履带车辆的转向控制研究[D].北京:北京理工大学。2003. [6]苑士华.多段液压机械双流无级传动的理论与试验研究[D].北京:北京理工大学,1999. (编辑阳光) 作者简介:吴宗文(1967一),男,助理工程师。主要从事装备管理及保障工作。 收稿日期:2006一12一16 万方数据
安全管理系统概要设计说明书v1.0
安全管理系统概要设计说明书 V1.0 陕西华臻车辆部件有限公司 技术管理部 2018年11月14日
修改记录 版本改动摘要作者签发人日期 审核记录 职务姓名签字日期
1.简介 (5) 2.系统目标 (5) 3.术语定义 (5) 4.规范定义 (5) 4.1界面开发规范 (5) 4.2数据库设计规范 (6) 5.数据库设计 (6) 6.架构设计 (6) 7.客户端设计 (7) 7.1公告栏 (7) 7.2组织机构 (7) 7.2.1公司委员会 (7) 7.2.2二级委员会 (7) 7.3安全管理 (8) 7.3.1责任区域 (8) 7.3.2危险作业审批 (8) 7.3.3统计分析 (8) 7.3.4隐患排查 (8) 7.3.5特种作业 (9) 7.4消防管理 (10) 7.4.1消防设施分布 (10) 7.4.2重点防火部位公示 (11)
7.5环保管理 (11) 7.5.1消防设施分布 ........................................... 错误!未定义书签。 7.5.2重点防火部位公示 ................................... 错误!未定义书签。 7.6应急管理 (11) 7.6.1应急预案 (11) 7.6.2应急物资 (11) 7.6.3应急演练 (12) 7.7基础管理 (12) 7.8安全检查 (17) 7.9职业卫生 (18) 8.服务器设计 (20)
1. 简介 本文档为安全管理系统STMS(Safety Technology Manage System)的概要设计文档,定义了系统开发的界面设计规范、编码规范、数据库设计规范、代码解决方案规范、系统架构设计、Web、移动设备客户端系统功能定义;服务器程序系统功能定义,为系统开发设计的总体设计文档。 2. 系统目标 将公司环境职业健康安全、消防的日常管理、监督管理、目标管理形成一体化管控模式,建立总公司、子分公司、各单位的各级环境/职业健康、消防管理工作的综合信息平台,形成自上而下,自下而上闭环管控综合信息平台。 3. 术语定义 WEB端:pc网页 移动端:智能设备网页 4. 规范定义 4.1界面开发规范 界面开发规范见文档《Java一体化平台002-页面开发规范.doc》。