MSP430F5529测周法测量信号频率
MSP430F5529测量频率
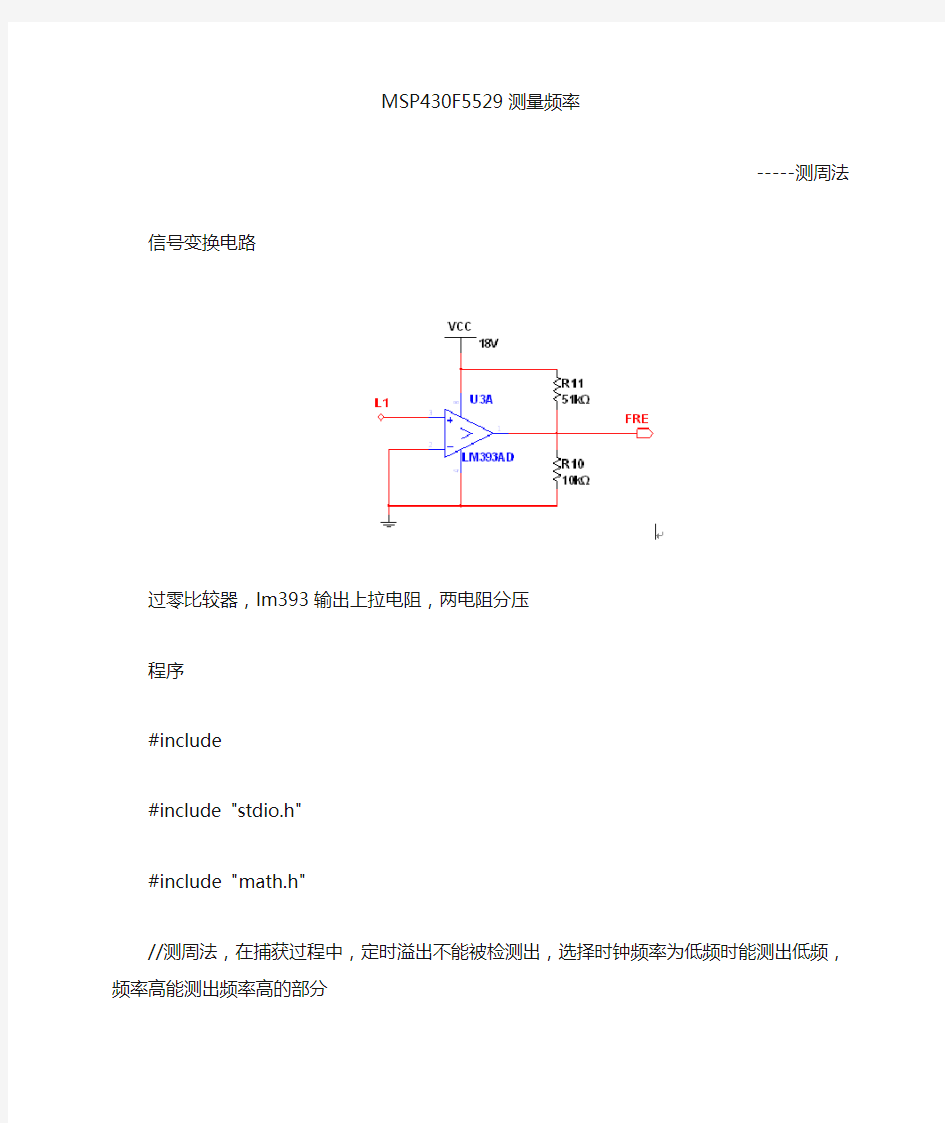
-----测周法信号变换电路
过零比较器,lm393输出上拉电阻,两电阻分压
程序
#include
#include "stdio.h"
#include "math.h"
//测周法,在捕获过程中,定时溢出不能被检测出,选择时钟频率为低频时能测出低频,频率高能测出频率高的部分
/*
* main.c
*/
long long start=0;
//long long int stop=0;
double fre=0.0;
unsigned char i=0;
unsigned char over=0;
void SetVcoreUp (unsigned int level)
{
// Open PMM registers for write
PMMCTL0_H = PMMPW_H;
// Set SVS/SVM high side new level
SVSMHCTL = SVSHE + SVSHRVL0 * level + SVMHE + SVSMHRRL0 * level;
// Set SVM low side to new level
SVSMLCTL = SVSLE + SVMLE + SVSMLRRL0 * level;
// Wait till SVM is settled
while ((PMMIFG & SVSMLDL YIFG) == 0);
// Clear already set flags
PMMIFG &= ~(SVMLVLRIFG + SVMLIFG);
// Set VCore to new level
PMMCTL0_L = PMMCOREV0 * level;
// Wait till new level reached
if ((PMMIFG & SVMLIFG))
while ((PMMIFG & SVMLVLRIFG) == 0);
// Set SVS/SVM low side to new level
SVSMLCTL = SVSLE + SVSLRVL0 * level + SVMLE + SVSMLRRL0 * level;
// Lock PMM registers for write access
PMMCTL0_H = 0x00;
}
void init_clock()
{
SetVcoreUp (0x01);
SetVcoreUp (0x02);
SetVcoreUp (0x03);
UCSCTL3 = SELREF_2; // Set DCO FLL reference = REFO
UCSCTL4 |= SELA_2; // Set ACLK = REFO
__bis_SR_register(SCG0); // Disable the FLL control loop
UCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx
UCSCTL1 = DCORSEL_7; // Select DCO range 50MHz operation UCSCTL2 = FLLD_0 + 609; // Set DCO Multiplier for 25MHz
// (N + 1) * FLLRef = Fdco
// (762 + 1) * 32768 = 25MHz
// Set FLL Div = fDCOCLK/2 __bic_SR_register(SCG0); // Enable the FLL control loop
__delay_cycles(782000);
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG);
// Clear XT2,XT1,DCO fault flags SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
}
void send_char(char sc)
{
UCA0TXBUF=sc;
while(!(UCA0IFG&UCTXIFG));
void send_string(char *s)
{
while(*s!='\0')
{
send_char(*s++);
}
}
init_uart()
{
P3SEL |= BIT3+BIT4; // P3.3,4 = USCI_A0 TXD/RXD
UCA0CTL1 |= UCSWRST; // **Put state machine in reset**
UCA0CTL1 |= UCSSEL__SMCLK; // SMCLK
UCA0BR0 = 173; // 1MHz 115200 (see User's Guide)
UCA0BR1 = 0; // 1MHz 115200
UCA0MCTL |= UCBRS_5 + UCBRF_0; // Modulation UCBRSx=1, UCBRFx=0 UCA0CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
UCA0IE |= UCRXIE; // Enable USCI_A0 RX interrupt
send_string("CLS(0);\r\n");
}
int main(void) {
char buf[60]="\0";
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
init_clock();
init_uart();
P1DIR &= ~BIT2; // P1.2 in
P1SEL |= BIT2; //捕获输入
TA0CTL = TASSEL_2 +ID__8 + MC_2 + TACLR+TAIE; // SMCLK, 连续mode, clear TAR 8分频下限可以测到8Hz。上限200K左右
TA0CCTL1 =CM_1 +SCS +CAP +CCIE;
__bis_SR_register( GIE); // Enter LPM0, enable interrupts
while(1)
{
sprintf(buf,"DS16(0,60,'频率:%1.1f',4);\r\n",fre);
send_string( buf);
__delay_cycles(314574);
}
}
//下限频率15,上限200K左右
#pragma vector=TIMER0_A1_VECTOR
__interrupt void TIMER0_A1_ISR(void)
{
switch(__even_in_range(TA0IV,14))
{
case 0: break; // No interrupt
case 2: //CCR1
{
i++;
if(i==1)
{ over=0;
TA0CTL |=TACLR;
}
if(i>=51)
{
i=0;
TA0CCTL0&=~CCIE;
start=over*65536+TA0CCR1;
fre=125000000/start;
TA0CTL |=TACLR;
}
}
break;
case 4: break; // CCR2 not used
case 6: break; // CCR3 not used
case 8: break; // CCR4 not used
case 10: break; // CCR5 not used
case 12: break; // CCR6 not used
case 14: over++;
break; //定时器溢出
default: break;
}
}
迭代法正弦信号频率估计
频率估计的相位加权平均算法及其迭代方法 在信号处理领域,估计复高斯白噪声环境中的单频复正弦信号的频率是一个十分重要的问题,其应用十分广泛。如在系统频率同步时,利用导频进行频偏估计等。 根据最大似然(ML )准则,解决该问题的最优方法是搜索周期图的谱峰位置,但是,即使采用FFT 快速算法,这种最大似然估计方法仍然具有非常大的运算量。因此,在文献[12]-[16]中提出了一些运算量相对较低的简化算法。要评价这些简化算法的估计性能,信噪比门限是一个重要的指标。某一算法的信噪比门限指的是该算法估计结果的均方误差开始离开CRB (Cramer-Rao bound )时的信噪比值。 文献[12]-[16]提出的方法中,WPA 方法[12]具有最低的运算量,但是其存在信噪比门限随所估计的复正弦信号频率的增大而升高的问题。为了克服这个问题,文献[16]提出了WNLP 方法,该方法可使得信噪比门限在整个[,)ππ-的估计范围内保持不变,但WNLP 方法的信噪比门限较高,当所估计的复正弦信号频率较低时,WNLP 方法的信噪比门限将高于WPA 方法。因此,本文提出了一种基于WPA 方法的迭代方法。该迭代方法不仅能在整个[,)ππ-的估计范围内保持其信噪比门限不变,而且其信噪比门限远低于WNLP 方法的信噪比门限。 .1 相位加权平均法 叠加复高斯白噪声的复正弦信号为: ()()0j n n s n Ae z ωθ+=+ 式中,0,1,2,,1n N =- 。 采样时刻序列表示采样周期的整数倍。主要关心的参量是频率0ω。n z 表示测量噪声。 记加权系数为:
22312212n N n N p N N ??????--?? ?????????=-?????????????? 。 频率的估计为: 11n n n n n x x x x ++=∠-∠=∠ , 2 010N n n n t p x x ?-+==∠∑ 。 式中2 01N n t p -==∑;0?是无偏估计。其中n 为相邻2点的相位差。Kay 提出的频率估 计算法在高信噪比下达到CR 门限。 在较高信噪比SNR > 6dB 时,估计误差可以达到CRB. Kay 方法理论上可以计算的频率范围为(),ππ-,其主要缺点是低信噪比情况下性能较差, 其门限信噪比还会随着待估频率的增大而增大. Kim 等人在Kay 方法的基础上, 针对Kay 方法的高信噪比门限问题,提出了前置矩形滤波器的思路,通过这一预处理, 极大地改善了信噪比门限这一问题,且只增加了少量的计算量, 然而Kim 方法的不足在于其频率估计范围极大地减小. 当前置滤波器为长度为M 的矩形滤波器时, 频率估计器可以获得()1010log M 的增益,但是其频率估计范围仅为(),M M ππ-,这种方法是以减小频率估计范围为代价来达到使频率估计方法适应于低信噪比情况。 另一方面,从最大谱峰搜索这一思路出发FITZ 首先推导出一种快速测频方法,如下式, ()()() (){} 016arg 121J N m m N n R m J J ω=≈-++∑
一种新的步进频率编码信号及其处理
一种新的步进频率编码信号及其处理 王华强,罗丰 (西安电子科技大学,陕西省西安市 710071) 摘 要:提出一种高分辨测速和测距的步进频率编码信号形式---复合步进频信号。该信号交 替发射一组单载频脉冲信号和一组载频以固定频率步长步进的脉冲信号。用单载频脉冲回波 信号做FFT 综合对目标初测速,再用载频步进脉冲回波信号做去速度模糊处理,完成对目标 速度的侦测。对速度补偿后的载频步进脉冲回波做类IFFT 综合完成目标的高分辨测距。文中 同正负步进频率编码信号进行了性能比较,表明该信号形式有较好的测速、测距性能。 关键词:雷达;频率步进;编码信号;速度高分辨;距离高分辨 1 引 言 频率步进脉冲雷达是一种重要的高分辨率雷达体制,通过对同一距离单元多个不同频率脉冲 回波信号的非相干积累[1], 在接收端通过信号合成实现对目标的一维高分辨成像。步进频体制降 低了系统的瞬时带宽, 从而减轻了数字信号处理的负担。 步进频率信号一般用于高分辨测距雷达,高距离分辨特性使得目标运动特性不能被忽略,必 须先对目标运动参数加以精确补偿,再进行测距信号处理。目标同雷达平台间的径向速度会导致 合成目标的径向一维距离像产生距离徙动和波形失真。 如果使用一种距离与多普勒耦合小的 步进频信号形式则可以减弱步进频的速度多普勒影响。文献[2]所提出的就是一种同时具有较高 测速、测距分辨力,模糊函数为“图钉”形的正负步进频率编码信号形式,提高了目标距离-速 度联合分辨能力。 ]3[本文也提出了一种同正负步进频率步进频类似的频率编码步进频信号形式---复合步进频信 号,并对这种信号形式做了分析,给出了利用此种信号形式的步进频雷达的信号处理方法。比较 表明,这种信号编码形式在相近的工作参数下较正负步进频率编码信号有更宽的测速范围、更高 的测速分辨和相对短的相干积累时间。 2 常规步进频率编码信号 步进频率编码信号是一组载频按固定频率递增的信号,其信号形式为 ])0(2exp[)(1)(10t f k f j kT t u N t s r N k c ?+?=∑?=π (1) 式中为编码脉冲串个数,为递增频率,是步进频率编码信号的起始步进频率, N f ?0f ?????≤≤=thers 0t 0 1)(o T T t u p p c 是能量归一的矩形脉冲,为脉冲持续时间。 p T 步进频率编码体制雷达通过对相同距离单元不同频率脉冲回波的相干积累处理,获得高分辨 的距离信息。当目标与雷达平台有相对运动时,二者的径向速度对雷达测距的影响显著,使得目 标在一维距离像上出现目标距离像的平移即距离走动和像的波形展宽、峰值降低即目标发散,甚 至使目标成像失败。步进频率编码信号在目标距离像综合前一般要进行速度补偿。 王华强 男,1980年5月生,江苏南京人,西安电子科技大学信号与信息处理专业硕士在读。
正弦信号发生器(幅值频率可调)
学号:2011013732 西北农林科技大学 电子技术课程设计报告 题目:正弦信号发生器(幅值频率可调) 学院(系):机械与电子工程学院 专业年级: 学生姓名: 指导教师: 完成日期: 2013年7月3日
目录 1. 设计的任务与要求............................................................. - 2 - 1.1 课题要求................................................................ - 2 - 1.2具体要求................................................................. - 2 - 1.3课题摘要:............................................................... - 2 - 1.4设计步骤:............................................................... - 2 - 2. 设计方案确定................................................................. - 3 - 3. 硬件电路设计................................................................. - 4 - 3.1整体电路框图............................................................. - 4 - 3.2 主要元器件介绍.......................................................... - 4 - 3.2.1 NE555芯片......................................................... - 4 - 3.2.2 555定时器接成多谐振荡器.......................................... - 6 - 3.2.3 NE5532P芯片....................................................... - 6 - 3.3 整体电路设计............................................................ - 7 - 3.4分立电路的设计及元件参数的选取及计算..................................... - 8 - 3.4.1 555多谐振荡电路.................................................. - 8 - 3.4.2带通滤波电路....................................................... - 8 - 3.4.3反向比例运算放大器................................................. - 9 - 4.调试与仿真................................................................... - 10 - 4.1使用的主要仪器和仪表.................................................... - 10 - 4.2分立电路的仿真(仿真图、操作的步骤、方法和结果)........................ - 10 - 4.2.1 仿真图........................................................... - 10 - 4.2.2仿真结果.......................................................... - 10 - 4.3调试电路的方法和技巧:.................................................. - 12 - 5. 总结........................................................................ - 13 - 6. 参考文献.................................................................... - 15 - 附录一......................................................................... - 16 - 1.元器件清单............................................................... - 16 - 2.电路原理图............................................................... - 17 - 3.PCB封装图................................................................ - 18 - 4.3D效果图................................................................. - 21 -
视频信号测试与测量
1. 理解复合视频信号 复合视频信号是所有需要生成视频信号的成分组合在同一信号中的信号。构成复合信号的三个主要成分如下: ● 亮度信号——包含视频图像的强度(亮度或暗度)信息 ● 色彩信号——包含视频图像的色彩信息 ● 同步信号——控制在电视显示屏等显示器上信号的扫描 单色复合信号是由两个成分组成的:亮度和同步。图1显示了这个信号(通常成为Y信号)。 图1:单色复合视频信号(亮度从白过渡到黑) 色彩信号通常被称为C信号,在图2中示出。 图2:彩色条的色彩信息信号(包括颜色突发) 复合彩色视频信号通常成为彩色视频、消隐与同步(CVBS)信号示Y与C之和,如图3所示。 CVBS = Y + C
图3:彩色条的彩色复合视频信号两个组成部分Y与C可以作为两个独立信号分开传输。这两个信号合称为Y/C或S视频。 2. 视频信号组成 单一水平视频行信号由水平同步信号、后沿、活动象素场以及前沿组成,如图4所示。 图4:视频信号组成 水平同步(HSYNC)信号示每条新的视频行的开始。其后是后沿,用来作为从浮地(交流耦合)视频信号去除直流分量的参考电平。这是通过单色信号的钳制间隔实现的,它出现在后沿中。对于合成彩色信号,钳制发生在水平同步脉冲中,由于大部分后沿用于色彩突发,它提供了信号色彩成分解码信息。在MAX帮助中,视频信号的所有设置参数都有较清楚的描述。 色彩信息可以包含在单色视频信号中。复合色彩信号包含标准单色信号(RS-170或CCIR),并加入了以下成分: ● 色彩突发:位于后沿,这是提供后续色彩信息相位和幅值参考的高频场。
● 色彩信号:这是实际的色彩信息。它由两个以色彩突发频率调制到载波的象限成分组成。这些组成部分的相位和幅值决定了每个象素的色彩内容。 视频信号的另一方面是垂直同步(VSYNC)脉冲。这实际上是在场之间发生的脉冲序列,用于通知显示器,完成垂直重跟踪,准备扫描下一场。在每个场中都有几行是不包含活动视频信息的。有些只包含HSYNC脉冲,而其他包含均衡与VSYNC脉冲序列。这些脉冲是在早期的广播电视中定义的,所以从那以后构成了标准的一部分,虽然之后的硬件技术能够避免部分附加脉冲的使用。在图5中给出了复合RS-170交叉信号,其中包括垂直同步脉冲,为了简单起见,下面给出了一个6行帧: 图5:VSYNC脉冲 应当理解对于从模拟相机得到的图片,其垂直尺寸(以象素为单位)是由帧接收器对水平视频行采样的速率所决定的。而这个速率是由垂直行速率合相机的体系结构所决定的。相机CCD阵列的结构决定了每个象素的大小。为了避免图像失真,您必须对水平方向,以一定速率进行采样,将水平的活动视频场分割为正确的象素点数。下面是RS-170标准的实例: 感兴趣参数: ● 行/帧数:525(其中包括用于显示的485线;其余是每两个场之间的VSYNC行) ● 行频率:15.734 kHz ● 行持续时间:63.556微秒 ● 活动水平持续时间:52.66微秒 ● 活动象素/行数:640 现在,我们可以进行一些计算: ● 象素时钟频率(每个象素达到帧接收器的频率):640象素/行/ 52.66 e-6 秒/行= 12.15 e6 象素/行(12.15 MHz) ● 活动视频的象素行长度+ 定时信息(称为HCOUNT):63.556 e-6 秒* 12.15 e6 象素/秒= 772 象素/行
基于LabVIEW的正弦信号频率与相位测量
基于LabVIEW 的正弦信号频率与相位测量 1. 前言 信号频率与相位的测量具有重要的实际意义。本文调研了频率与相位的多种测量算法,并借助LabVIEW 编程实现。在此基础上,对各种算法进行了比较研究,且提出了行之有效的改进措施。 2. 采样定理与误差分析 2.1 采样定理 时域信号()f t 的频谱若只占据有限频率区间m m ωω(-,),则信号可以用等间隔的采样值唯一表示,而最低采样频率为m 2f 。采样定理表明:信号最大变化速度决定了信号所包含的最高频率分量,要使采样信号能够不失真地反映原信号,必须满足在最高频率分量的一个周期内至少采样两个点。 2.2 误差分析 对连续周期信号()a x t 进行采样得离散序列()d x n ,如果满足采样定理,则离散序列 ()d x n 的傅里叶级数()dg X k 是连续信号()a x t 的傅里叶级数1()ag X k ω的周期延拓,否则会 出现两种形式的误差。 2.2.1 泄漏误差 在连续信号()a x t 一个周期1T 内采样1N 个点,如果正好满足11s N T T =(s T 为采样间隔),则是完整周期采样,采样结果()d x n 仍为周期序列,周期为1N 。基于()d x n 一个周期1N 个点计算离散傅里叶级数()dg X k ,由()dg X k 可以准确得到连续信号()a x t 的傅里叶级数 1()ag X k ω。如果在连续信号()a x t 的M 个周期时间内采样整数1N 个点,即11s N T MT =, 也是完整周期采样。在此情况下,采样结果()d x n 仍为周期序列,周期为1N ,但()d x n 的一个周期对应于()a x t 的M 个周期,由离散序列()d x n 仍然可以准确得到连续信号()a x t 的
利用Matlab绘制正弦信号的频谱图并做相关分析
利用Matlab绘制正弦信号的频谱图并做相关分析
————————————————————————————————作者:————————————————————————————————日期: ?
利用Matlab绘制正弦信号的频谱图并做相关分析 一、作业要求: 1、信号可变(信号的赋值、相位、频率可变); 2、采样频率fs可变; 3、加各种不同的窗函数并分析其影响; 4、频谱校正; 5、频谱细化。 二、采用matlab编写如下程序: clear; clf; fs=100;N=1024; %采样频率和数据点数 A=20;B=30;C=0.38; n=0:N-1;t=n/fs; %时间序列 x=A*sin(2*pi*B*t+C); %信号 y=fft(x,N); %对信号进行傅里叶变换 yy=abs(y); %求得傅里叶变换后的振幅 yy=yy*2/N; %幅值处理 f=n*fs/N; %频率序列 subplot(3,3,1),plot(f,yy);%绘出随频率变化的振幅 xlabel('频率/\itHz'); ylabel('振幅'); title('图1:fs=100,N=1024'); gridon; %两种信号叠加, x=A*sin(2*pi*B*t+C)+2*A*sin(2*pi*1.5*B*t+2.5*C); %信号 y=fft(x,N); %对信号进行傅里叶变换 yy=abs(y);%求得傅里叶变换后的振幅 yy=yy*2/N; %幅值处理 f=n*fs/N; %频率序列 subplot(3,3,2),plot(f,yy);%绘出随频率变化的振幅 xlabel('频率/\itHz'); ylabel('振幅'); title('图2:fs=100,N=1024,两种信号叠加'); gridon; %加噪声之后的图像 x=A*sin(2*pi*B*t+C)+28*randn(size(t)); y=fft(x,N); yy=abs(y); yy=yy*2/N;%幅值处理 subplot(3,3,3),plot(f(1:N/2.56),yy(1:N/2.56)); xlabel('频率/\itHz'); ylabel('振幅'); title('图3:fs=100,N=1024混入噪声');
视频信号指标与测试方法
1.视频信号幅度: 标准的视频信号幅度是1Vp-p,由两个测试指标组成: 1) 白条幅度(视频电平):700mV 2) 同步脉冲幅度:300mV 图1 视频信号 幅度对视频的影响: l 同步幅度:超出指标值会引起图像扭曲,甚至图像显示无法观看 l 白条幅度:超出指标值会造成图像过亮或过暗 2.亮度非线性 从消隐电平(黑电平)到白电平之间变化的线性度。 5级幅度的阶梯信号(每级140mV)通过被测通道后,计算相应各阶梯幅度值之间的最大差值.
图2 亮度非线性计算 亮度非线性对视频的影响: l 图象失去灰度,层次减少。 l 分辨率降低,产生色饱和度失真(由于色度信号是叠加在亮度信号上)。 3.K系数 把各种波形失真按人眼视觉特性给予不同评价的基础上来度量图象损伤,这里的失真是短时间波形失真。 一般用“2T正弦平方波失真”( K-2T)作为测试指标。
图3 2T脉冲 图4 K-2T计算 K系数对视频的影响: 导致图像出现多轮廓、造成重影,使清晰度下降。 4.微分增益(DG): 由图像亮度信号幅度变化引起的色度信号幅度失真。 5级带色度调制的阶梯信号通过被测通道后,计算各阶梯上的色度幅度值之间的最大差值。
图5 DG测试信号调制的五阶梯 图6 微分增益(DG)计算 微分增益(DG)对视频的影响 l 不同亮度背景下的色饱和度失真,影响彩色效果。比如:穿鲜红衣服从暗处走向亮处,鲜红衣服会变浓或变淡。 5.微分相位(DP): 由图像亮度信号幅度变化引起的色度信号相位失真。
5级带色度调制的阶梯信号通过被测通道后,计算各阶梯上的色度副载波的相位角和消隐电平上副载波信号的相位角之差,超前为正。 DP的测试信号与DG相同。 微分相位(DP)对视频的影响 在不同亮度背景下,色调产生失真,影响彩色效果。例如:鲜红衣服从暗处走到明处,鲜红衣服就偏黄或偏紫。 6.色度/亮度增益差 把一个具有规定的亮度和色度分量幅度的测试信号通过被测通道,输出端信号中亮度分量和色度分量幅度比的改变称色度/亮度增益差。 图7 20T脉冲
MSP430F5529测周法测量信号频率
MSP430F5529测量频率 -----测周法信号变换电路 过零比较器,lm393输出上拉电阻,两电阻分压 程序 #include
// Wait till SVM is settled while ((PMMIFG & SVSMLDL YIFG) == 0); // Clear already set flags PMMIFG &= ~(SVMLVLRIFG + SVMLIFG); // Set VCore to new level PMMCTL0_L = PMMCOREV0 * level; // Wait till new level reached if ((PMMIFG & SVMLIFG)) while ((PMMIFG & SVMLVLRIFG) == 0); // Set SVS/SVM low side to new level SVSMLCTL = SVSLE + SVSLRVL0 * level + SVMLE + SVSMLRRL0 * level; // Lock PMM registers for write access PMMCTL0_H = 0x00; } void init_clock() { SetVcoreUp (0x01); SetVcoreUp (0x02); SetVcoreUp (0x03); UCSCTL3 = SELREF_2; // Set DCO FLL reference = REFO UCSCTL4 |= SELA_2; // Set ACLK = REFO __bis_SR_register(SCG0); // Disable the FLL control loop UCSCTL0 = 0x0000; // Set lowest possible DCOx, MODx UCSCTL1 = DCORSEL_7; // Select DCO range 50MHz operation UCSCTL2 = FLLD_0 + 609; // Set DCO Multiplier for 25MHz // (N + 1) * FLLRef = Fdco // (762 + 1) * 32768 = 25MHz // Set FLL Div = fDCOCLK/2 __bic_SR_register(SCG0); // Enable the FLL control loop __delay_cycles(782000); do { UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG); // Clear XT2,XT1,DCO fault flags SFRIFG1 &= ~OFIFG; // Clear fault flags }while (SFRIFG1&OFIFG); // Test oscillator fault flag } void send_char(char sc) { UCA0TXBUF=sc; while(!(UCA0IFG&UCTXIFG));
电子测量复习题解答
一、填空题 1、在选择仪器进行测量时,应尽可能小的减小示值误差,一般应使示值指示在仪表满刻度值的___2/3__ 以上区域。 2、随机误差的大小,可以用测量值的____标准偏差____ 来衡量,其值越小,测量值越集中,测量的____精密度____ 越高。 3、设信号源预调输出频率为1MHz ,在15 分钟内测得频率最大值为1.005MHz ,最小值为998KHz ,则该信号源的短期频率稳定度为___0.7%___ 。 4、信号发生器的核心部分是振荡器。 5、函数信号发生器中正弦波形成电路用于将三角波变换成正弦波。 6、取样示波器采用非实时取样技术扩展带宽,但它只能观测重复信号。 7、当观测两个频率较低的信号时,为避免闪烁可采用双踪显示的____断续____方式。 8、BT-3 型频率特性测试仪中,频率标记是用一定形式的标记来对图形的频率轴进行定量,常用的频标有___针形频标_____ 和____菱形频标_____ 。 9、逻辑分析仪按其工作特点可分逻辑状态分析仪和逻辑定时分析仪。 10、指针偏转式电压表和数码显示式电压表测量电压的方法分别属于____模拟__ 测量和___数字___ 测量。
1、测量误差是测量结果与被测值的差异。通常可以分为 绝对误差 和 相对误差 。 2、在测量数据为正态分布时,如果测量次数足够多,习惯上取 3σ 作为判别异常数据的界限,这称为莱特准则。 3、交流电压的波峰因数P K 定义为 峰值与有效值之比 ,波形因 数F K 定义为 有效值与平均值之比 。 4、正弦信号源的频率特性指标主要包括 频率范围 、频率准确度 和 频率稳定度 。 5、频谱分析仪按信号处理方式不同可分为 模拟式 、 数字式 和模拟数字混合式。 6、逻辑笔用于测试 单路信号 ,逻辑夹则用于 多路信号 。 7、当示波器两个偏转板上都加 正弦信号 时,显示的图形叫李沙育图形,这种图形在 相位 和频率测量中常会用到。 8、在示波器上要获得同步图形,待测信号周期y T 与扫描信号周期x T 之比要符合 y x nT T 。 1、按照误差的基本性质和特点,可把误差分为 系统误差 、 随机误差、 和 粗大误差 。 2、按检波器在放大器之前或之后,电子电压表有两种组成形式,即 放大-检波式 和 检波-放大式 。 3、在双踪示波器的面板上,当“微调”增益控制旋钮顺时针方向转
怎么确定步进电机脉冲频率
怎么确定步进电机脉冲频率 步进电机驱动及控制技术解答 南京步进电机厂技术部 1.步进电机为什么要配步进电机驱动器才能工作? 步进电机作为一种控制精密位移及大范围调速专用的电机, 它的旋转是以自身固有的步距角角(转子与定子的机械结构所决定)一步一步运行的, 其特点是每旋转一步,步距角始终不变,能够保持精密准确的位置。所以无论旋转多少次,始终没有积累误差。由于控制方法简单,成本低廉,广泛应用于各种开环控制。步进电机的运行需要有脉冲分配的功率型电子装置进行驱动, 这就是步进电机驱动器。它接收控制系统发出的脉冲信号,按照步进电机的结构特点,顺序分配脉冲,实现控制角位移、旋转速度、旋转方向、制动加载状态、自由状态。控制系统每发一个脉冲信号, 通过驱动器就能够驱动步进电机旋转一个步距角。步进电机的转速与脉冲信号的频率成正比。角位移量与脉冲个数相关。步进电机停止旋转时,能够产生两种状态:制动加载能够产生最大或部分保持转矩(通常称为刹车保持,无需电磁制动或机械制动)及转子处于自由状态(能够被外部推力带动轻松旋转)。步进电机驱动器,必须与步进电机的型号相匹配。否则,将会损坏步进电机及驱动器。 2.什么是驱动器的细分?运行拍数与步距角是什么关系? “细分”是针对“步距角”而言的。没有细分状态,控制系统每发一个步进脉冲信号,步进电机就按照整步旋转一个特定的角度。步进电机的参数,都会给出一个步距角的值。如110BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这是步进电机固有步距角。通过步进电机驱动器设置的细分状态,步进电机将会按照细分的步距角旋转位移角度,从而实现更为精密的定位。以110BYG25 0A电机为例,列表说明: 电机固有步距角运行拍数细分数电机运行时的真正步距角 0.9°/1.8°8 2细分,即半步状态0.9° 0.9°/1.8°20 5细分状态0.36° 0.9°/1.8°40 10细分状态0.18° 0.9°/1.8°80 20细分状态0.09° 0.9°/1.8°160 40细分状态0.045° 可用看出,细分数就是指电机运行时的真正步距角是固有步距角(整步)的几分指一。例如,驱动器工作
简易频率特性测试仪
简易频率特性测试仪(E题) 2013年全国电子设计大赛 摘要:本频率特性测试仪由AD9854为DDS频率合成器,MSP430为主控制器,根据零中频正交解调原理对被测网络针对频率特性进行扫描测量,将DDS 输出的正弦信号输入被测网络,将被测网络的出口信号分别与DDS输出的两路正交信号通过模拟乘法器进行乘法混频,通过低通滤波器取得含有幅频特性与相频特性的直流分量,由高精度A/D转换器传递给MSP430主控器,由MSP430对所测数据进行分析处理,最终测得目标网络的幅频特性与相频特性,同时通过LCD绘制相应的特性曲线,从而完成对目标网络的特性测试。本系统具有低功
耗,成本低廉,控制方便,人机交互友好,工作性能稳定等特点,不失为简易频率特性测试仪的一种优越方案。 关键字:DDS9854,MSP430,频率特性测试 目录 一、设计目标 (3) 1、基本要求: (4)
2、发挥部分: (4) 二、系统方案 (4) 方案一 (5) 方案三 (5) 方案二 (5) 三、控制方法及显示方案 (5) 四、系统总体框图 (6) 五、电路设计 (6) 1、DDS模块设计 (6) 2、DDS输出放大电路 (7) 3、RLC被测网络 (8) 4、乘法器电路 (8) 5、AD模数转换 (9) 六、软件方案 (10) 七、测试情况 (11) 1、测试仪器 (11) 2、DDS频率合成输出信号: (11) 3、RLC被测网络测试结果 (12) 4、频谱特性测试 (12) 八、总结 (12) 九、参考文献 (12) 十、附录 (13) 一、设计目标 根据零中频正交解调原理,设计并制作一个双端口网络频率特性测试仪,包括幅频特性和相频特性。
基于单片机正弦波有效值的测量
基于单片机正弦波有效值的测量 一.简介 本作品以单片机STC12C5A60S2为主控芯片并以此为基础,通过二极管1N5819实现半波整流,使用单片机内部自带10位AD对整流后的输入信号进行采样,从而实现对峰值的检测;同时通过运放LM837对输入信号进行放大,之后通过施密特触发器,将原始信号整形成可被单片机识别的标准脉冲波形,之后配合内部计数器(定时器)达到测量其频率的目的;这样,整流和AD采样实现对输入信号峰值的检测;通过放大、整形实现对输入信号频率的检测。 二.基本功能与技术指标要求 (1)输入交流电压:1mV~50V,分五档: ①1mV~20mV,②20mV~200mV,③200mV~2V,④2V~20V,⑤20v~50V。 (2)正弦频率;1Hz~100kHz; (3)检测误差:≤2%; (4)具有检测启动按钮和停止按钮,按下启动按钮开始检测,按下停止按钮停止检测; (5)显示方式:数字显示当前检测的有效是,在停止检测状态下,显示最后一次检测到的有效值; (6)显示:LCD,显示分辨率:每档满量程的0.1%; 三.理论分析 本文要求输入交流信号,通过电路测量其峰值,频率,有效值以
及平均值,因为输入的交流信号为模拟信号,而一般处理数据使用的主控芯片单片机处理的是数字信号,所以我们选择使用数模转换器AD(Analog to Digital Converter)将输入的模拟信号转换为数字信号,并进行采样;由于要求输入交流信号电压峰峰值Vpp为 50mV~10V,所以如果我们采用AD为8位,则最小采样精度为 ,因此会产生78.4%的误差,并且题目要求输入交流信号的频率范围为40Hz~50kHz,所以为了保证对高频率信号的单周期内采样个数,我们需要选择尽量高速度的AD; 因此我们选用使用单片机STC12C5A60S2,其内部自带AD为8路10位最高速度可达到250KHz,所以我们可以将最小采样精度缩小到 ,并且在输入交流信号频率最大时(50KHz)在单个周期内可采集5个点,因此可保证测量精度。 由于该AD只能接受0~5V的模拟信号输入,所以当我们直接输入一个双极性信号时可能损坏AD,因此当信号进入AD之前我们要进行半波整流,为此我们设计了整流电路,在交流信号通过整流电路输入AD 后,由AD实时输出对应模拟信号大小的二进制数,并存入变量MAX 中,随着信号的不断输入MAX中只保存AD输出过的最大值,这样既 可测出输入信号的峰值;由交流信号有效值表达式 可知检波器应当首先把输入的瞬时电压平方, 然后在一定平均时间内取平均值再开方。即可得到交流信号的有效值,然后通过比较峰值
示波器检测全电视视频信号的波形图解
示波器检测全电视视频信号的波形图解 彩电维修更是示波器用武之地,图①②③是全电视视频信号的波形,这种波形贯穿图像通道的全过程。对有光栅有伴音而无图像的故障此波形的有无处就是故障所在点。图④是场输出波形,当光栅出现异常是此波形将有明显变形。最下边是三幅波形图和对应的电视屏幕图像场畸形⑤是行输出变形,一般情况下不要测行管集电极,以免击穿探头。可测低压绕组的输出端,也可在1比10衰减探头后再接一个9M的电阻去测试。图⑩是行振荡电路输出的行激励波形。当行输出波形变成图11波形时多是行激励不足,行管发热温升快,易烧坏。图12是高压包局部短路的波形。图⑥是晶体振动器的波形,在示波器频率指标不够时看到的是一条亮带。它是判断CPU是否工作的主要依据。图⑦是开关电源开关管集电极的波形,是判断电源是否振荡的基本条件。如波形上沿有毛刺将导致开关变压器支支响和开关管损坏。图⑧是沙堡脉冲波形,它是由三个作用不同的脉冲组合而成,在场频时将观察不到它的全貌。它的有无将影响视频信号的色彩和亮度处理。图⑨是视放尾板上三个电子枪阴极的波形,与一些图纸上所标波形不一样,因图纸所 标是彩条信号的波形,这是电视图像的信号波形。
笔者最近将ET521A及健伍CS-4035模拟(40M)示波器进行了实际波形测试,并拍下了一些彩电波形供大 家参考。 健伍CS-4035为带宽40MHz的实时模拟示波器,属典型的手动调节(无CRT读出功能)测试示波器,其所有测试均需手动调节,需对水平扫描速度、垂直灵敏度、同步电平等控制功能进行适当调节方能获得稳定合适的波形显示,由于其采用屏幕为8*10cm内刻度高亮度示波管进行波形显示,故而扫描线亮度清晰度高,内设有电视行场同步触发滤波通道,能方便观察到稳定的行场同步电视信号波形,是比较适合的常 用模拟示波器。 ET521A波形测量采用数字取样、液晶显示,显示采用几秒刷新一次,方便人眼观察,当波形变化较多时,其显示的波形在显示一种波形后,下一次显示的波形又会有所不同,初次接触到的该类显示方式的朋友会不习惯,感觉到波形老是一跳一跳的,实际上是示波表在捕捉动态波形,进行静态显示,此时更能观察到波形的各个细节;当测量的波形为稳定而变化很小的信号时,则显示波形的稳定性与CRT模拟示波器显示无多大差别的,以上是笔者对数字示波表测量显示的粗浅理解,请大家多多指教。 被测彩电为21吋海信OM8370超级芯片彩电比较关键的波形,工作信号是A V信号(卫星接收机实时视频信号)输入;其中标有第“2(或其它)”脚是指OM8370的引脚序号,请大家注意,其它的一些波形都注明了电路功能位置的。下面的图形中标有图a的是CS-4035测得的波形,而标有图b波形为ET521A测 得的波形; 由于CS-4035为手动调节的模拟示波器,故而测量波形时须得适当调节水平扫描、垂直灵敏度、触发同步模式及同步电平等才能获得合适的波形显示,由于其档位难以完整记录,故而未列出其波形的周期、频率、Vp-p值等,只是为取得适当观察的波形进行拍摄,并不说明测量时不用调节其测量旋钮,其各项参数可参考ET521A的读数,ET521A全面的数据显示,可极其方便读取波形的频率、周期、Vp-p值,供参 考分析。 一、OM8370第②、③脚时钟、数据线波形图: 此主题相关图片如下:2脚波形.jpg 此主题相关图片如下:第2脚scl串行时钟信号波形图b.jpg
基于FPGA的数字频率测量仪
EDA实验报告 题目:基于FPGA的数字频率测量仪姓名:吕游 学号:201212171909
1.实验目的 1)掌握偶数倍分频电路的设计思路。 2)掌握带有计数使能输入端和异步清零功能的模为10的计数模块。 3)掌握动态扫描数码管的计数的工作原理及其使用方法。 2.实验任务 1)利用所学的知识设计一个4位的频率计,可以测量从1-9999Hz的信号频率。 2)将被测信号的频率在四个动态数码管上显示出来。采用文本设计的方法,设计软件用Quartus2。 3.实验原理 1. 功能与原理 采用一个标准的基准时钟,在单位时间(如1s)里对被测信号的脉冲数进行计数。 即为信号的频率。4位数字频率计的顶层框如下图所示,整个系统分三个模块:控制模块、计数测量模块和数据锁存器。 1)控制模块 控制模块的作用是产生测频所需要的各种控制信号。控制模块的标准输入时钟为
1Hz,每两个周期进行一次频率测量。该模块产生三个控制信号,分别是:count_en,count_clr和load。Count_clr信号用于在每一次测量开始时,对计数模块进行复位,以清除上次测量的结果。复位信号高电平有效,持续半个时钟周期的时间。Count_en 信号为计数允许信号,在Count_en信号的上升沿时刻,计数模块开始对输入信号的频率进行测量,测量时间恰为一个时钟周期(1s),在此时间里对被测信号的脉冲数进行计数,即为信号的频率。然后将该值锁存,并送到数码管显示出来。设置锁存器的好处是,显示的数据稳定,不会由于周期性的清零信号而闪烁不断。在每一次测量开始时,都必须重新对计数模块清零。 控制模块所产生的几个控制信号的时序关系如下图所示。从图中可以看到,计数使能信号Count_en在1s的高电平后,利用其反相值的上跳沿产生一个锁存信号Load,然后产生清零信号上升沿。 2)锁存器模块 锁存器模块也是必不可少的。测频模块测量完后,在Load信号的上升沿时刻将测量值锁存到寄存器中,然后输出,送到实验板上的数码管上显示出相应的数据。 3)计数模块 计数模块用于在单位时间中对输入信号的脉冲数进行计数,该模块必须有计数允许、异步清零等端口,以便于控制模块对其进行控制。 2. 设计实现 4位数字频率测试仪的顶层原理图,其中fre_ctrl是控制模块,count_10是计数模块,latch_16是16位锁存器模块。这三个模块都采用文本方式设计实现。
用示波器测量信号的电压及频率
用示波器测量信号的电压及频率 长江大学马天宝应物1203班 1、示波器和使用 -【实验目的】 1.了解示波器的大致结构和工作原理。 2.学习低频信号发生器和双踪示波器的使用方法。 3.使用示波器观察电信号的波形,测量电信号的电压和频率。 【实验原理】 一、示波器原理 1.示波器的基本结构 示波器的种类很多,但其基本原理和基本结构大致相同,主要由示波管、电子放大系统、扫描触发系统、电源等几部分组成,如图4.9-1所示。 (1)示波管 示波管又称阴极射线管,简称CRT,其基本结构如图4.9-2所示,主要包括电子枪、偏转系统和荧光屏三个部分。 电子枪:由灯丝、阳极、控制栅极、第一阳极、第二阳极五部分组成。灯丝通电后,加热阴极。阴极是一个表面涂有氧化物的金属圆筒,被加热后发射电子。控制栅极是一个顶端有小孔的圆筒,套在阴极外面,它的电位相对阴极为负,只有初速达到一定的电子才能穿过栅极顶端的小孔。因此,改变栅极的电位,可以控制通过栅极的电子数,从而控制到达荧光屏的电子数目,改变屏上光斑的亮度。示波器面板上的“亮度”旋钮就是起这一作用的。阳极电位比阴极高得多,对通过栅极的电子进行加速。被加速的电子在运动过程中会向四周发散,如果不对其进行聚焦,在荧光屏上看到的将是模糊一片。聚焦任务是由阴极、栅极、阳极共同形成的一种特殊分布的静电场来完成的。这一静电场是由这些电极的几何形状、相对位置及电位决定的。示波器面板上的“聚焦”旋钮就是改变第一阳极电位用的,而“辅助聚焦”就是调节第二阳极电位用的。 偏转系统:它由两对互相垂直的平行偏转板——水平偏转板和竖直偏转板组成。只有在偏转板上加上一定的电压,才会使电子束的运动方向发生偏转,从而使荧光屏上光斑的位置发生改变。通常,在水平偏转板上加扫描信号,竖直偏转板上加被测信号。. 荧光屏:示波管前端的玻璃屏上涂有荧光粉,电子打上去它就会发光,形成光斑。荧光材料不同,发光的颜色不同,发光的延续时间(余辉时间)也不同。玻璃屏上带有刻度,供测量时使用。 (2)电子放大系统 为了使电子束获得明显的偏移,必须在偏转板上加上足够的电压。被测信号一般比较弱,必须进行放大。竖直(Y轴)放大器和水平(X轴)放大器就是起这一作用的。 (3)扫描与触发系统 扫描发生器的作用是产生一个与时间成正比的电压作为扫描信号。触发电路的作
使用AGILENT频率计数器进行快速测量
使用频率计数器进行快速测量 您可以配置新型频率计数器使其每秒能够读取数百个读数,以便随时检定信号变化。需牢记的是,频率计数器最适合测量稳定或变化缓慢的信号。此外,为了获得精确读数,最好是选取一个理想的读数,而不要试图获取许多读数的平均值。按照以下步骤设置频率计数器可帮您实现最快测量。下面以Agilent53131A、53132A和53181A频率计数器的SCPI命令进行介绍。 技巧1:将计数器设置为已知状态。 发出重新设置命令之后,在仪器回到就绪状态之前最好不要发出其他命令。对于大多数仪器而言,在程序中设置1秒钟的等候或延迟即足以使其返回到就绪状态。如果仪器在重新设置过程中收到命令,那么该命令可能会被丢失。 *RST i?Reset the counter, i?Clear the counter and interface *CLS i?Clear errors and status registers *SRE0i?Clear service request enable register *ESE0i?Clear event status enable register i?Preset enable registers and transition filters :STATus:PRESet 技巧2:对输出格式进行设置,以匹配仪器所使用的数据类型。 这将避免当仪器在后期处理阶段将数据转换为不同格式时发生延迟。 :FORMAT ASCII i?Data in ASCII format 技巧3:禁用所有的后期处理和打印操作。 当您禁用这些功能时,处理器将会专注于获取读数,并将它们发送至计算机上,而不会去响应其他干扰(例如,更新显示等)。 :CALC:MATH:STATE OFF :CALC2:LIM:STATE OFF :CALC3:AVER:STATE OFF :HCOPY:CONT OFF :ROSC:SOUR INT :ROSC:EXT:CHECK OFF