缓和曲线的计算步骤
缓和曲线的计算步骤
在缓和曲线的计算中,首先要判断缓和曲线的完整性。判断公式为
L 0=C/R
上式中,L 0为缓和曲线的计算长度,C 为缓和曲线参数,C =A 2,A 也是缓和曲线的一个参数,R 为设计给的缓和曲线起、终点半径中的最小值。若计算出来的L 0与设计给的缓和曲线长度l 一样,那么该曲线即是完整的,若L 0比设计给的缓和曲线长度要大,那么设计给的缓和曲线就不是完整的。
下面就完整缓和曲线与不完整缓和曲线的计算方法作一个说明。
一、完整缓和曲线的计算方法:
完整缓和曲线有一个特征,就是它的起点或终点半径中有一个是无穷大(该点不是ZH 点就一定是HZ 点),我们称的“缓和曲线起点”就从这个半径为无穷大的点开始的。
计算过程如下:
1、根据交点(JD )的桩号推求直缓点、缓圆点、曲中点、圆缓点、缓直点的桩号。有时设计已经给出这些数据。
2、 建立切线坐标系,求曲线中线点的切线坐标。
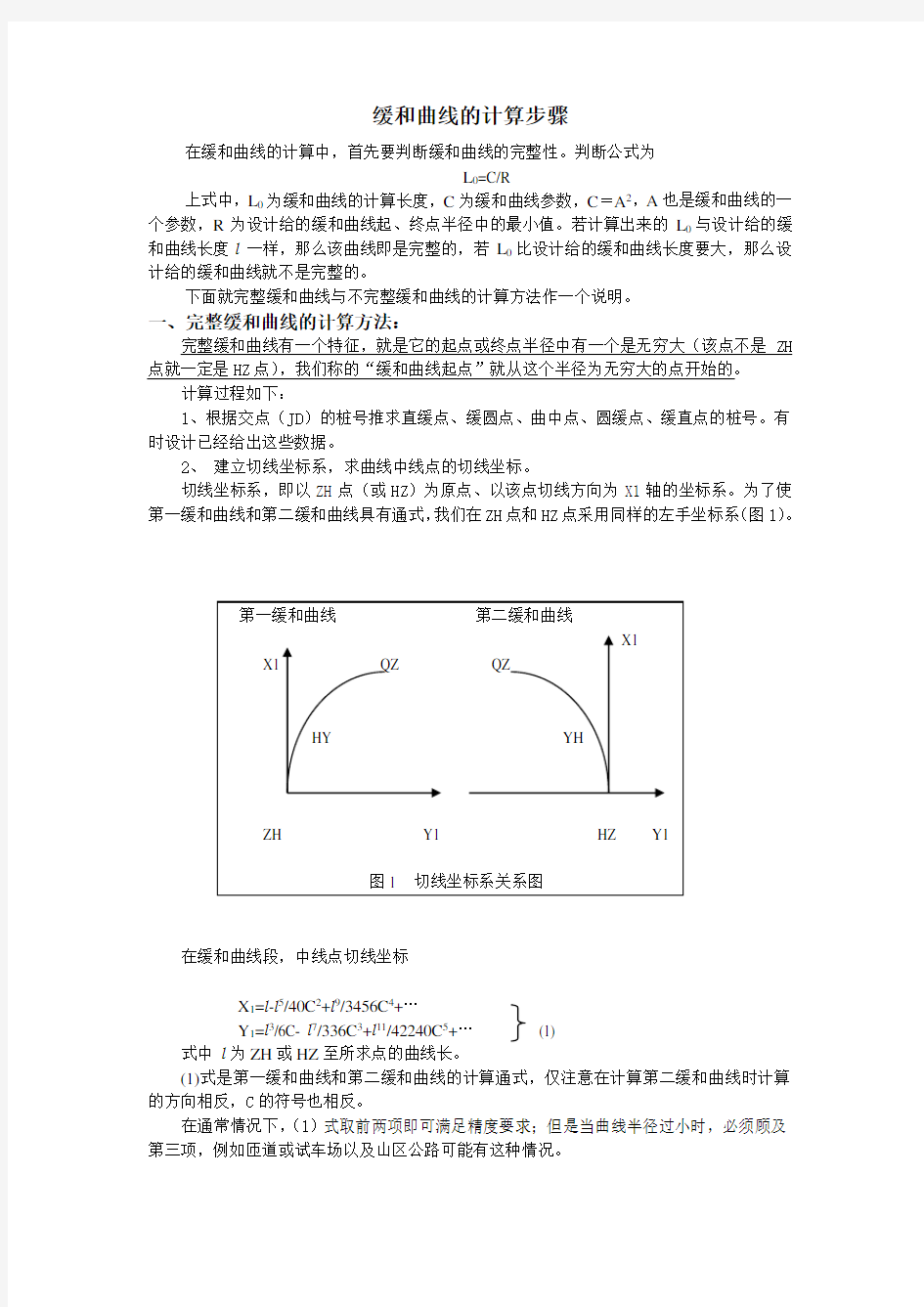
切线坐标系,即以ZH 点(或HZ )为原点、以该点切线方向为X1轴的坐标系。为了使第一缓和曲线和第二缓和曲线具有通式,我们在ZH 点和HZ 点采用同样的左手坐标系(图1)。
在缓和曲线段,中线点切线坐标
X 1=l -l 5/40C 2+l 9/3456C 4+…
Y 1=l 3/6C- l 7/336C 3+l 11/42240C 5+…
(1)
式中 l 为ZH 或HZ 至所求点的曲线长。
(1)式是第一缓和曲线和第二缓和曲线的计算通式,仅注意在计算第二缓和曲线时计算的方向相反,C 的符号也相反。
在通常情况下,(1)式取前两项即可满足精度要求;但是当曲线半径过小时,必须顾及第三项,例如匝道或试车场以及山区公路可能有这种情况。
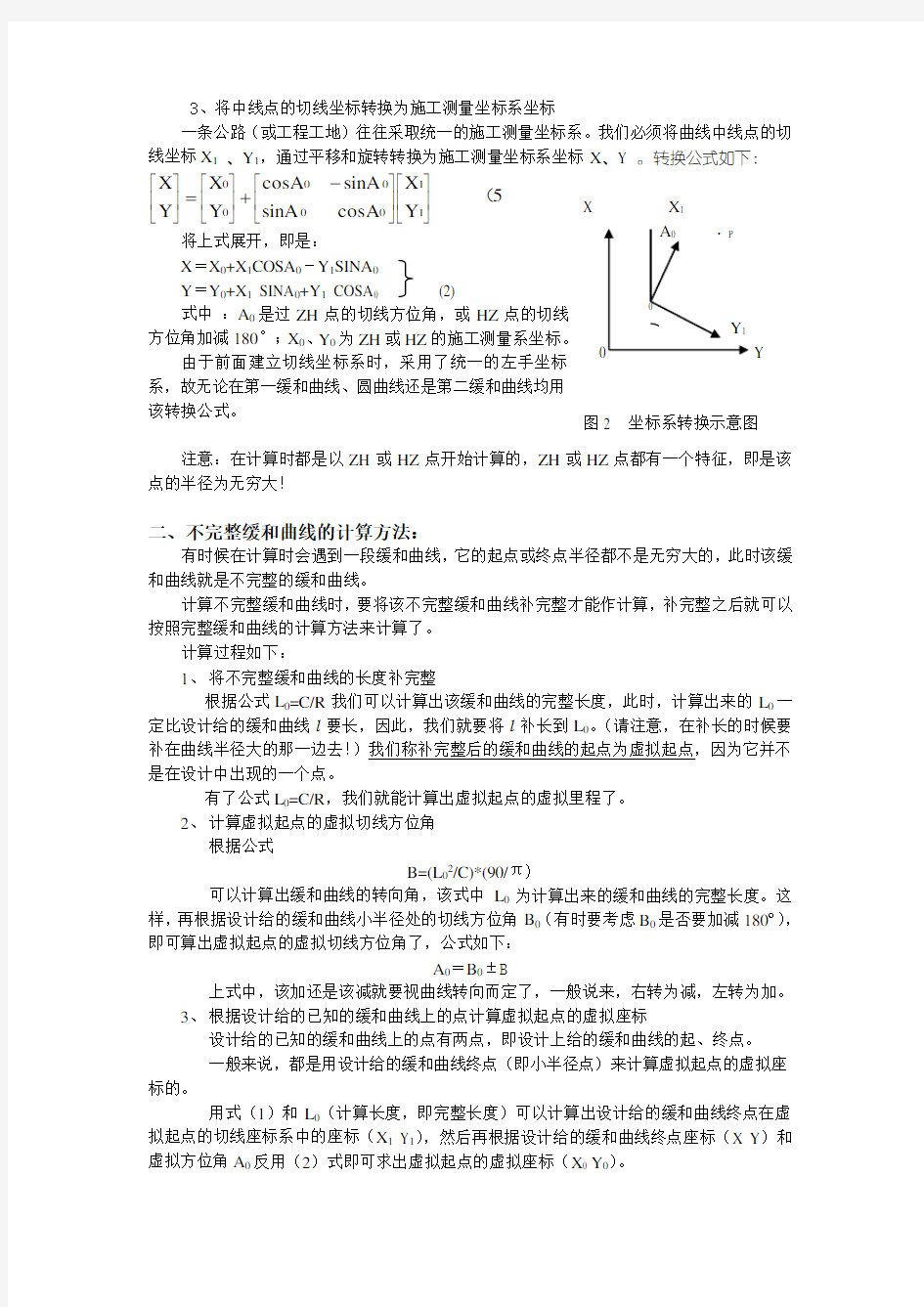
3、将中线点的切线坐标转换为施工测量坐标系坐标
一条公路(或工程工地)往往采取统一的施工测量坐标系。我们必须将曲线中线点的切 线坐标X 1 、Y 1,通过平移和旋转转换为施工测量坐标系坐标X 、Y 。转换公式如下: 将上式展开,即是:
X =X 0+X 1COSA 0-Y 1SINA 0
Y =Y 0+X 1 SINA 0+Y 1 COSA 0
(2)
式中 :A 0是过ZH 点的切线方位角,或HZ 点的切线
方位角加减180°;X 0、Y 0为ZH 或HZ 的施工测量系坐标。
由于前面建立切线坐标系时,采用了统一的左手坐标系,故无论在第一缓和曲线、圆曲线还是第二缓和曲线均用该转换公式。
注意:在计算时都是以ZH 或HZ 点开始计算的,ZH 或HZ 点都有一个特征,即是该点的半径为无穷大!
二、不完整缓和曲线的计算方法:
有时候在计算时会遇到一段缓和曲线,它的起点或终点半径都不是无穷大的,此时该缓和曲线就是不完整的缓和曲线。
计算不完整缓和曲线时,要将该不完整缓和曲线补完整才能作计算,补完整之后就可以按照完整缓和曲线的计算方法来计算了。
计算过程如下:
1、 将不完整缓和曲线的长度补完整
根据公式L 0=C/R 我们可以计算出该缓和曲线的完整长度,此时,计算出来的L 0一定比设计给的缓和曲线l 要长,因此,我们就要将l 补长到L 0。(请注意,在补长的时候要补在曲线半径大的那一边去!)我们称补完整后的缓和曲线的起点为虚拟起点,因为它并不是在设计中出现的一个点。
有了公式L 0=C/R ,我们就能计算出虚拟起点的虚拟里程了。
2、 计算虚拟起点的虚拟切线方位角
根据公式
B=(L 02/C)*(90/π)
可以计算出缓和曲线的转向角,该式中L 0为计算出来的缓和曲线的完整长度。这样,再根据设计给的缓和曲线小半径处的切线方位角B 0(有时要考虑B 0是否要加减180o),即可算出虚拟起点的虚拟切线方位角了,公式如下:
A 0=
B 0±B
上式中,该加还是该减就要视曲线转向而定了,一般说来,右转为减,左转为加。
3、 根据设计给的已知的缓和曲线上的点计算虚拟起点的虚拟座标
设计给的已知的缓和曲线上的点有两点,即设计上给的缓和曲线的起、终点。
一般来说,都是用设计给的缓和曲线终点(即小半径点)来计算虚拟起点的虚拟座标的。
用式(1)和L 0(计算长度,即完整长度)可以计算出设计给的缓和曲线终点在虚拟起点的切线座标系中的座标(X 1 Y 1),然后再根据设计给的缓和曲线终点座标(X Y )和虚拟方位角A 0反用(2)式即可求出虚拟起点的虚拟座标(X 0 Y 0)。
X X 1 Y 图2 坐标系转换示意图 (5
Y X cosA sinA sinA cosA Y X Y X 110000
00?????????-???+??????=??????
4、计算缓和曲线上各点的座标
现在,已经计算出虚拟起点的虚拟座标、虚拟切线方位角、虚拟里程了,接下来就是根据完整缓和曲线的计算方法,用(1)式和(2)式从虚拟起点开始计算缓和曲线上各点的座标。
三、缓和曲线上各点的切线方位角的计算
根据上面所述,我们已经知道了完整缓和曲线起点的切线方位角或不完整缓和曲线的虚拟起点的虚拟切线方位角A0,根据公式
B=(l2/C)*(90/π)
可以计算出曲线上任一点的切线与缓和曲线起点或虚拟起点切线的夹角,式中l为要计算的点至曲线起点或虚拟起点的长度(即里程差)。
再根据公式
α=A0±B
就可以计算出缓和曲线上任一点的切线方位角。
(完整word版)缓和曲线计算原理
1.2道路线形的基本介绍 道路运输在整个国民经济生活中起着重要作用。道路的新建和改建,测量工作必须先行,所以公路施工测量所承担的任务也是非常大的,为了更好的进行道路施工工作,下面就道路线形进行一下简单的介绍。 一般所说的路线,是指道路中线的空间位置。中线在水平面上的投影称作路线的平面;沿中线竖直剖切再行展开则是路线的纵断面;中线上任一点法向切面是道路在该点的横断面。 无论是铁路、公路还是地铁隧道和轻轨,由于受到地形、地物、地质及其他因素的限制,经常要改变线路前进的方向。当线路方向改变时,在转向处需用曲线将两直线连接起来。因此,线路工程总是由直线和曲线所组成。曲线按其线形可分为:圆曲线、缓和曲线、复曲线和竖曲线等。 公路中线应满足的几何条件是:线形连续平滑;线形曲率连续(中线上任一点不出现两个曲率值);线形曲率变化率连续(中线上任一点不出现两个曲率变化值)。考虑上述几何条件,顾及计算与敷设方便,现代公路平面线形要素由直线、圆曲线和缓和曲线构成,称之为平面线形三要素。其中缓和曲线的曲率半径是从∞逐渐变到圆曲线半径R 的变量。在与直线连接处半径为∞,与圆曲线连接处半径为R ,曲线上任一点的曲率半径与该点至起点的曲线长成反比。 目前公路线形设计已开始使用非对称线形(成为非对称平曲线)设计,特别是在互通立交匝道和山区高速高速公路线形设计中,这种线形设计使用得较多。非对称线形分为完全非对称线形和非对称非完整线形两种,所谓“完全非对称曲线”的含义就是第一缓和曲线和第二缓和曲线起点处(ZH 或HZ )的半径为∞,圆半径为R ,第一缓和曲线长1s l ,第二缓和曲线长为2s l ,12s s l l ≠。所谓“非完整”的含义是第一缓和曲线和第二缓和曲线的半径不是∞,而是1 R 、2 R 。而坐标法成为高速公路放样的主要方法,坐标法放样 线路中线的这个操作过程中,最重要的一部就是计算线路放样点的坐标。 2 路线中桩坐标计算原理 在实际工程中,线路的设计由专门的设计方完成,在线路完成设计得到审批后设计方便把所设计线路的线路要素(或者称为曲线要素)提供给施工方。所提供的曲线要素一般包括:线路中各曲线段的起点坐标、起点里程、起点半径、终点坐标、终点里程、终点半径、交点坐标、曲线参数、转角(包括用一定的符号表示左右转)、两条切线长(起点与终点各所对应的两条切线)、曲线长。当然不同的工程项目所提供的曲线要素也不一样,以上所述的要素是大多数设计方会提供的,有的设计方在提供上述要素的前提下,还提供曲线段的外距、中点坐标、弦长或者走向方位角等要素,供施工方在计算
公路竖曲线高程计算程序
fx-4800P计算器 公路竖曲线高程计算程序 (程序名:GAO CHENG-HP) Lb1 0︰{CDAB}︰C“K1=”︰D“H1=”︰A“PV-K0=”︰B “PV-H0=”↙ Lb1 1 ︰{REF }︰R“R=”︰E“K2=”︰F“H2=”↙Lb1 2︰U =(B-D)÷(A-C)︰V =(F-B)÷(E-A)︰U >V =>N = 0︰T = R ( U-V ) ÷2︰≠>N = 1︰T = R ( V-U ) ÷2 ︰⊿G = A -T ︰Q = A +T ︰W = T 2÷(2 R)↙ Lb1 3︰{K}︰K “I.T.E.ZY-K.YZ-K=0,1”︰ K =0 =>Goto 4 ︰⊿U “I 1”= U ▲V “I 2”= V ▲T = T ▲W “E”= W ▲G “ZY-K”= G ▲Q “YZ-K”= Q▲↙ Lb1 4︰{M}︰M“PK=”︰M ≤A =>Goto 5︰⊿Goto 6 ↙Lb1 5︰M ≤G =>H = B-U ( A-M ) ︰Goto 7 ︰≠>Prog “H1 ”︰N = 1 =>H = B+X-Y ︰Goto 7︰≠>N = 0 =>H = B-X -Y ︰Goto 7↙ Lb1 6︰M ≥Q =>H = B+V ( M-A ) ︰Goto 7 ︰≠>Prog “H2 ”︰N = 1 =>H = B+X+Y ︰Goto 7︰≠>N = 0 =>H = B-X +Y ↙ Lb1 7︰H “HP”= H ▲{L}︰L“BZ-T=0,L”︰L = 0 =>Goto 8 ︰⊿{S}︰S “IL=”︰H “HL”= H +S L ▲↙
缓和曲线计算公式
缓和曲线计算公式 缓和曲线计算公式: 缓和曲线参数: 0=A L R ? 缓和曲线长度R A L ÷=20 缓和曲线半径÷=2A R 0L 所谓完整缓和曲线就是某段缓和曲线的一端与直线连接点的曲率半径必须是无穷大(可用10的45次方代替,有时也可用“0”表示,具体情况具体分析),而缓和曲线两端无论在什么情况下与圆曲线相接时,其两端的曲率半径必须与对应连接圆曲线的半径相等。现在我们来谈谈非完整缓和曲线,从上面的话知道,如果某段缓和曲线的一端与直线连接点曲率半径不是无穷大,而是一个实数,那么这段缓和曲线就是非完整缓和曲线。 设计图中遇到这种情况,一般会告诉这段缓和曲线的长度(我们把这段缓和曲线的长度记作L2,缺少的一段缓和曲线长度记作L1,L1+L2=完整缓和曲线长度L),如果没告诉这段缓和曲线的长度,也可以通过两端的桩号计算出来、设计参数A 及缓和曲线另一端的曲率半径R2(应该是与一个圆曲线相接,也就是说R2等于这个圆曲线的半径)。我们在输入匝道程序时必须要知道R1(起点曲率半径),怎么办呢?那就通过计算把R1计算出来不就行了,下面就是计算过程: 由公式:R=A2÷L 推出R1= A2÷L1 => A2=R1*L1 ……………………………………………………① R2= A2÷(L1+L2) => A2=R2*(L1+L2) ……………………………………………………② R2= A2÷(L1+L2) => R2= A2÷L => L=A2÷R2 …………………………………………③ 由公式①②推出 R1*L1=R2*(L1+L2) => R1=R2*(L1+L2)÷L1 …………………………………………④ L=L1+L2 => L1=L-L2 ……………………………………………⑤ 由公式③④⑤推出 R1=R2*L÷(L-L2) => R1= A2÷(A2÷R2-L2) …………………………………………⑥ 公式⑥就是我们要找的曲率半径公式,计算得到结果计算完毕。现在我们在编制非完整缓和曲线程序时就清楚的知道起点和终点的曲率半径了。还要说明一点就是,计算出来的曲率半径既是起点也是终点,既是终点也是起点,关键是看线路前进方向了,只要大家细心,分清起点终点输入程序,计算出来的准没错。
FX-4850计算器曲线计算程序2011.721
ZHY程序FX5800 辛普森计算器公路测量常用程序修改版一、程序功能 LbI 0:"X="?A: "Y="?B:"Z="?C:"1/(R1)"?D:"1/(R2)"?E:"QT="?F: "QT="?G: "V"?V:"W"?W LbI 1:"L"?L:"O"?O:"H"?H:IF L>G:Then Goto 1:IFEnd (E-D)/(G-F)→P:L-F→Q:P*Q→I C+(I+2*D)*Q*(90/∏)→J C+(I/4 +2*D)*Q*(45/(2*∏))→M C+(3/4*I+2*D)*Q*(135/(2*∏))→N C+(I÷2+2*D)*Q*(45÷∏) →K "X=":A+Q÷12*(COS(C)+4*(COS(M)+C0S(N))+2*COS (K)+COS(J))+O*COS(J+H)→X◢ "Y=":B+Q÷12*(SIN(C)+4*(SIN(M)+SIS(N))+2*SIN (K)+SIN(J))+O*SIN(J+H)→Y◢ X-V→I:Y-W→J PoL(I,J) ”J=”:J▲DMS▲ If J <0:Then “J=”:J+360°→J:J▲DMS ▲ if End Goto1
F5800计算器曲线计算JD程序(ZH~HZ)坐标计算放样公式 主程序: 30→Dim Z: "XJD="?B: "YJD="?D: "KJD="?M: "A="?A: "ZJ="? Q: "R="?R: "LS1="?C: "LS2="?T: "F="?F:prog "A":Lb1 0: "XO="?G: "YO="?H: "LC="?L: "JJ="?Z: "PJ="?S:If L≤M-Z[11]+C:Then M- Z[11]COS(F) →N:D- Z[11]Sin(F) →E:Prog "ZHHY":Prog "FWJ": Goto 0:Else If L≤M-Z[11]+ Z[13]-T: Then M- Z[11] →K:B- Z[11] COS(F) →N:D- Z[11]Sin(F) →E: Prog "HYYH":Prog "FWJ": Goto 0: Else If L≤M-Z[11]+ Z[13]:Then M- Z[11]+ Z[13] →K:F+AQ+180→V:B-Z[12] COS(V) →N:D- Z[12] Sin(V) →E: Prog "YHHZ":Prog "FWJ": Goto 0: Else "End" ▲ If End: If End: If End 说明:以上主程序需要四个副程序,缺少任何一个副程序不能运行! "XJD="?: "YJD="?: "KJD="?为曲线交点坐标及桩号 "A="?为曲线左转取-1;右转取1 "ZJ="?为曲线转角值;"R="?为曲线半径 "LS1="?: "LS2="?为前后段缓和曲线长度 "F="?曲线起始方位角; " X0="?、" Y0="?:全站仪测站点坐标 " LC="?为曲线ZH-HZ段内所求任意点桩号; "JJ="?为切线顺时针夹角;"PJ="?为左右侧所求点距设计线距离;
缓和曲线计算公式
高速公路的线路(缓和曲线)计算公式 一、缓和曲线上的点坐标计算 已知:①缓和曲线上任一点离ZH 点的长度:l ②圆曲线的半径:R ③缓和曲线的长度:l 0 ④转向角系数:K(1或-1) ⑤过ZH 点的切线方位角: α ⑥点ZH 的坐标:x Z ,y Z 计算过程:
说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下: 当计算第二缓和曲线上的点坐标时,则: l为到点HZ的长度 α为过点HZ的切线方位角再加上180° K值与计算第一缓和曲线时相反 x Z ,y Z 为点HZ的坐标 ? 切线角计算公式: 二、圆曲线上的点坐标计算 已知:①圆曲线上任一点离ZH点的长度:l
②圆曲线的半径:R ③缓和曲线的长度:l 0 ④转向角系数:K(1或-1) ⑤过ZH 点的切线方位角:α ⑥点ZH 的坐标:x Z ,y Z 计算过程: 说明:当曲线为左转向时,K=1,为右转向时,K=-1, 公式中n 的取值如下: 当只知道HZ 点的坐标时,则:
l为到点HZ的长度 α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反 x Z ,y Z 为点HZ的坐标 ? 三、曲线要素计算公式
公式中各符号说明: l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)——第一缓和曲线长度 l 1 ——第二缓和曲线长度 l 2 l ——对应的缓和曲线长度 R——圆曲线半径
R ——曲线起点处的半径 1 ——曲线终点处的半径 R 2 P ——曲线起点处的曲率 1 P ——曲线终点处的曲率 2 α——曲线转角值 四、竖曲线上高程计算 (上坡为“+”,下坡为“-”)已知:①第一坡度:i 1 (上坡为“+”,下坡为“-”) ②第二坡度:i 2 ③变坡点桩号:S Z ④变坡点高程:H Z ⑤竖曲线的切线长度:T ⑥待求点桩号:S
工程测量竖曲线程序及公式
竖曲线程序要素 已知要素 ? 1. 变坡点里程桩号 2. 变坡点高程3. 竖曲线半径4. 变坡点前坡度(上坡为正,下坡 为负) 5. 变坡点后坡度(上坡为正,下坡为负)6.待求点里程 计算公式 ●凹凸型:当前坡度-后坡度为正,则为凸型,反之为凹型 ●转坡角(曲折角):前坡度–后坡度 ●竖曲线长:半径* 转坡角 ●切线长:竖曲线长/ 2 ●外矢距:切线长的平方/ 2倍半径 ●待求点到变坡点距离:待求点桩号–变坡点桩号(取绝对值) ●曲线起终点桩号: 起点:变坡点的桩号–切线长终点:变坡点的桩号+ 切线长 ●任意点切线标高:变坡点的标高±测点与变坡点里程距离*该里程对应坡度 ●任意点设计标高: 1. 凸型:该桩号在切线上的设计标高–修正值 2. 凹型:该桩号在切线上的设计标高+ 修正值 程序条件 ◆条件:如果待求点≦变坡点,则待求点–起点=间距,反之待求点>变坡点,则终点–待 求点=间距 ●曲线点间距:待求点–起点或终点–待求点 If K ≦Z:Then K - A→X:Else K > Z =>B - K→X : IfEnd ●竖曲线上点的高程修正值:曲线点间距的平方/ 2倍半径 ◆条件:凸型竖曲线(J>0) 如果待求点≦变坡点,则任意点设计标高=变坡点高程-(变坡点-待求点)* 前坡度(取绝对值)-修正值,反之待求点>变坡点,则变坡点任意点设计标高=变坡点高程-(待求点-变坡点)* 后坡度(取绝对值)-修正值 If K≦Z:Then H-Abs(U*I)-Y→G:Else K>Z=>H-Abs(U*L)-Y→G:IfEnd ◆条件:凹型竖曲线(J<0) 如果待求点≦变坡点,则任意点设计标高=变坡点高程+(待求点-变坡点)* 前坡度(取绝对值)+修正值,反之待求点>变坡点,则变坡点任意点设计标高=变坡点高程+(变坡点-待求点)* 后坡度(取绝对值)+修正值 If K≦Z:Then H+Abs(U*I)+Y→G:Else K>Z=>H+Abs(U*L)+Y→G:IfEnd
曲线拨正计算程序说明
曲线拨正计算程序 一、概述 曲线方向整正常用的方法有矢距法、偏角法和绳正法。前两种多应用于新建或改建的铁路上。在既有线上,由于行车的干扰,置镜困难,绳正法得以普遍应用。绳正法基本上是以一种试算性质的、称之为流水拨道的为主。过去,由于条件的限制,现场人员计算一条曲线要费好大的劲,因为数据量较大,一遍一遍的要算好几张纸,搞的头疼。现在,电脑得以广泛应用,为做好线路养护维修奠定了良好基础。根据绳正法整正曲线基本原理、公式,在Windows平台上编写了这个计算程序。希望给我的同行带来方便,节约时间,又快又好的把铁路曲线拨正,拨圆,让火车跑的稳,跑的快,适应提速的需要。同时,也借此机会交流经验,向专家,老师学习。 二、适用范围与主要功能 本程序适用于直线型超高顺坡的缓和曲线,不能计算复心曲线,不适用于曲线型超高顺坡的缓和曲线拨正计算;对无头、无尾、无资料的“三无”曲线可自动初步判别曲线半径及缓和曲线长度,通过试算找到较小的拨道量,曲线计算完毕后将结果输出到Word文档,同时输出缓和曲线两种检查表,一是以2m弦线测量,在缓和曲线上每1m量一处正矢的;二是以10m弦线测量,在缓和曲线上每5m一点的。等同于缓和曲线加设副矢检查点,主要是为了适应提速的需要,把缓和曲线做好。 三、操作过程
1、程序运行后开始出现的是登录画面,如下图:要求输入口令。 初始口令为“000000”,即6个0。以后你可以根据自己的习惯,修改呢称、口令。 2.主画面。上面的图就是主画面一角,共有5个主菜单:分别是:[计算],[输出],[设置],[退出],[说明]。其中后二项没有子菜单,前三项的子菜单如下三幅图。 [计算]项下一共是5个子菜单,分别是[填入现场正矢]、[确定半径、缓和线长]、[计算半拨量]、[修正、计算拨量]及[退出]。现在看到,填入正矢菜单是灰色的,表示里面已有曲线数据在计算,现场正矢、控制点和备注的内容都填好了,不能改了。只有点击[设置]里面的[计算新曲线开关],这个菜单才变得可操作,但同时也清空了现有的数据。 3.计算一条曲线的过程:
缓和曲线圆曲线计算公式
缓和曲线、竖曲线、圆曲线、匝道(计算公式) 一、缓和曲线上的点坐标计算 已知:①缓和曲线上任一点离ZH点的长度:l ②圆曲线的半径:R ③缓和曲线的长度:l0 ④转向角系数:K(1或-1) ⑤过ZH点的切线方位角:α ⑥点ZH的坐标:xZ,yZ 计算过程: 说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下: 当计算第二缓和曲线上的点坐标时,则: l为到点HZ的长度 α为过点HZ的切线方位角再加上180° K值与计算第一缓和曲线时相反 xZ,yZ为点HZ的坐标 切线角计算公式: 二、圆曲线上的点坐标计算 已知:①圆曲线上任一点离ZH点的长度:l ②圆曲线的半径:R ③缓和曲线的长度:l0 ④转向角系数:K(1或-1) ⑤过ZH点的切线方位角:α ⑥点ZH的坐标:xZ,yZ
计算过程: 说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下: 当只知道HZ点的坐标时,则: l为到点HZ的长度 α为过点HZ的切线方位角再加上180° K值与知道ZH点坐标时相反 xZ,yZ为点HZ的坐标 三、曲线要素计算公式
公式中各符号说明: l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度 l2——第二缓和曲线长度 l0——对应的缓和曲线长度 R——圆曲线半径 R1——曲线起点处的半径 R2——曲线终点处的半径 P1——曲线起点处的曲率 P2——曲线终点处的曲率 α——曲线转角值 四、竖曲线上高程计算 已知:①第一坡度:i1(上坡为“+”,下坡为“-”) ②第二坡度:i2(上坡为“+”,下坡为“-”) ③变坡点桩号:SZ
公路缓和曲线原理及缓和曲线计算公式
一、缓和曲线 缓和曲线是设置在直线与圆曲线之间或大圆曲线与小圆曲线之间,由较大圆曲线向较小圆曲线过渡的线形,是道路平面线形要素之一。 1.缓和曲线的作用 1)便于驾驶员操纵方向盘 2)乘客的舒适与稳定,减小离心力变化 3)满足超高、加宽缓和段的过渡,利于平稳行车 4)与圆曲线配合得当,增加线形美观 2.缓和曲线的性质 为简便可作两个假定:一是汽车作匀速行驶;二是驾驶员操作方向盘作匀角速转动,即汽车的前轮转向角从直线上的0°均匀地增加到圆曲线上。 S=A2/ρ(A:与汽车有关的参数) ρ=C/s C=A2 由上式可以看出,汽车行驶轨迹半径随其行驶距离递减,即轨迹线上任一点的半径与其离开轨迹线起点的距离成反比,此方程即回旋线方程。 3.回旋线基本方程 即用回旋线作为缓和曲线的数学模型。 令:ρ=R,l h=s 则 l h=A2/R
4.缓和曲线最小长度 缓和曲线越长,其缓和效果就越好;但太长的缓和曲线也是没有必要的,因此这会给测设和施工带来不便。缓和曲线的最小长度应按发挥其作用的要求来确定:1)根据离心加速度变化率求缓和曲线最小长度为了保证乘客的舒适性,就需控制离心力的变化率。a1=0,a2=v2/ρ,a s=Δa/t≤0.6 2)依驾驶员操纵方向盘所需时间求缓和曲线长度(t=3s) 3)根据超高附加纵坡不宜过陡来确定缓和曲线最小长度 超高附加纵坡(即超高渐变率)是指在缓和曲线上设置超高缓和段后,因路基外侧由双向横坡逐渐变成单向超高横坡,所产生的附加纵坡。 发布日期:2012-01-31 作者:李秋生浏览次数:149 4)从视觉上应有平顺感的要求计算缓和曲线最小长度 缓和曲线的起点和终点的切线角β最好在3°——29°之间,视觉效果好。 《公路工程技术标准》规定:按行车速度来求缓和曲线最小长度,同时考虑行车时间和附加纵坡的要求。 5.直角坐标及要素计算
5800计算器竖曲线程序
CASIO fx5800p全线高程计算程序 GAOCHEN 主程序 Lbl 1 “KM=,<0,Stop”:?K:K<0=>Stop:“PY=”?L:Prog”GK” C-D→E:Abs(RE/2)→T:R(Abs(E)/E)→R If K≤B-T:Then 0→H:Else:If K≥B+T Then 0→H:D→C:Else K-B+T→H:Ifend:Ifend A-(B-K)C-H2/(2R)-0.000→G:Cls “KM=”:Locate 4,1,K:Locate 10,1,“PY=”:Locate 13,1,L:Fix 3 “H=”:Locate 4,2,G Prog “PODU”:(E-B)/(D-A)(K-A)+B→I:(F-C)/(D-A)(K-A)+C→J “HL=”:G+I(L-1)→X:Locate 4,3,X:Locate 11,3,“I=”:Locate 13,3,I*100 “HR=”:G+J(L-1)→Y:Locate 4,4,Y:Locate 11,4,“I=”:Locate 13,4,J*100◢显示中边桩高程 Cls:Norm 2:“BM+HS≤0,Goto 1”?Z:Z≤0=> Goto 1:Cls (输入视线高) “KM=”:Locate 4,1,K:Locate 10,1,“PY=”:Locate 13,1,L:Fix 3 “QSM=”: Locate 6,2,Z-G (显示中桩读数) “QSL=”: Locate 6,3,Z-X (显示左桩读数) “QSR=”: Locate 6,4,Z-Y◢(显示右桩读数) Norm 2:Cls:Goto1 (后面可加已知视线高计算读数部分,不想计算读数则视线高输入0或负数如不想显示麻烦,可将Locate语句去掉) 以下两个子程序不需运行,只是两个独立的数据库赋值程序,字母重复不影响计算结果 GK 数据库子程序 If K≤第二曲线起点桩号:Then 第一曲线交点高程→A:第一曲线交点桩号→B:第
缓和曲线要素及计算公式
缓和曲线要素及计算公式 缓和曲线:在直线与圆曲线之间加入一段半径由无穷大逐渐变化到圆曲线半径的曲线,这种曲线称为缓和曲线。 缓和曲线的主要曲线元素 缓和曲线主要有ZH 、HY 、QZ 、YH 、HZ 5个主点。 由此可得: q P R q T T h ++=+=2 tan )(α R P R E h -+=2 sec )(α s h L R L 2180)2(0+-=πβα 180 )2(0R L y πβα-= 式中:h T -缓和曲线切线长 h E -缓和曲线外矢距 h L -缓和曲线中曲线总长 y L -缓和曲线中圆曲线长度
缓和曲线与圆曲线区别: 1. 因为缓和曲线起始端分别和直线与圆曲线顺滑的相接,因此必须将原来的圆曲线向内移动一段距离才能够接顺,故曲线发生了内移(即设置缓和曲线后有内移值P 产生) 2. 缓和曲线的一部分在直线段,另一部分插入了圆曲线,因此有切线增长值q; 3. 由于有缓和曲线的存在,因此有缓和曲线角0β。 缓和曲线角 0β的计算: R L S 2/0=β(弧度)= R L S π90 (度) 内移值P 的计算: ()m R L P S 242 = 切线增长值q 的计算: )(240223 m R L L q S S -= P -缓和曲线内移值 q -缓和曲线切线增长值 0β-缓和曲线首或尾所采用的缓和曲线段分别的总缓和曲线角。 S L -缓和曲线两端各自的缓和曲线长。 R -缓和曲线中的主圆曲线半径 α-偏转角
缓和曲线主点桩号: ZH 桩号=JD 桩号-h T HY 桩号=ZH 桩号+S L QZ 桩号=HY 桩号+2y L YH 桩号=QZ 桩号+ 2 y L HZ 桩号=ZH 桩号+h L 另外、QZ 桩号、YH 桩号、HZ 桩号还可以用以下方式推导: QZ 桩号=ZH 桩号+ 2 h L YH 桩号=HZ 桩号-S L HZ 桩号=YH 桩号+S L 切线支距法计算坐标: 缓和曲线段内坐标计算如式: 2 2540S P p L R L L -=X s P RL L Y 63 = 进入净圆曲线段内坐标计算如式: ?? ??????- ?? ???+=R L L R q X s p π1802 sin ? ??????????- ?? ? ?? -???+=R L L R P Y s p π1802cos 1
竖曲线自动计算表格
竖曲线自动计算表格 篇一:Excel竖曲线计算 利用Excel表格进行全线线路竖曲线的统一计算 高速公路纵断面线型比较复杂,竖曲线数量比较多。由于相当多的竖曲线分段造成了设计高程计算的相对困难,为了方便直接根据里程桩号计算设计高程,遂编制此计算程序。程序原理: 1、根据设计图建立竖曲线参数库; 2、根据输入里程智能判断该里程位于何段竖曲线上; 3、根据得到的竖曲线分段标志调取该分段的曲线参数到计算表格中; 4、把各曲线参数带入公式进行竖曲线高程的计算; 5、对程序进<0 = J=0; M-P=0 = J=1 B: K<=D =B=-M ; KD = B=P 程序特色: 1、可以无限添加竖曲线,竖曲线数据库不限制竖曲线条数; 2、直接输入里程就可以计算设计高程,不需考虑该里程所处的竖曲线分段;
3、对计算公式进行保护,表格中不显示公式,不会导致公式被错误修改或恶意编辑。 程序的具体编制步骤: 1、新建Excel工作薄,对第一第二工作表重新命名为“参数库”和“计算程序”,根据设计图建立本标段线路竖曲线的参数库,需要以下条目: (1)、竖曲线编号; (2)、竖曲线的前后坡度(I1、I2)不需要把坡度转换为小数; (3)、竖曲线半径、切线长(不需要考虑是凸型或凹型);(4)、竖曲线交点里程、交点高程; (5)、竖曲线起点里程、终点里程(终点里程不是必要参数,只作为复核检测用);如图1所示: 图1 2、进行计算准备: (1)、根据输入里程判断该里程所处的曲线编号: 需要使用lookup函数,函数公式为“LOOKUP(A2,参数库!H3:H25,参数库!A3:A25)”。如图2所示: 里程为K15+631的桩号位于第11个编号的竖曲线处,可以参照图1 进行对照 (2)、在工作表“程序计算”中对应“参数库”相应的格式建立表格
5800计算器公路坐标计算程序(全线)直缓和圆曲线程序
5800计算器公路坐标计算程序(全线) 原4850程序改编 Lb1 1 ”K”?K:”W”?W:”O”?O:”I”?I IF K<41490.879:Then 40776.825→A: 41490.879→ B: 3761346.715→ M: 505279.147→N:166°45′36.3″→F: 1/1045→D:1/1045→E :Goto 0 :Return:Ifend IF K<41690.879:Then 41490.879→A: 41690.879→ B: 3760651.641→ M: 505442.686→N:166°45′36.3″→F: 1/1045→D:1/1000→E :Goto 0 :Return:Ifend IF K<42242.154:Then 41690.879→A: 42242.154→ B: 3760455.626→ M: 505481.961→N:172°29′22.78″→F: 1000→ R:Goto 2: Return:Ifend IF K<42442.154:Then 42242.154→A: 42442.154→ B: 3759916.982→ M: 505403.549→N:204°04′31.62″→F: 1/1000→D: 1/1045→E: Goto 0 : Return:Ifend IF K<42673.884:Then 42442.154→A: 42673.884→ B: 3759740.299→ M: 505310.019→N :209°48′18.1″→F: 1/1045→D: =1/1045→E :Goto 0 : Return:Ifend IF K<42863.884:Then 42673.884→A: 42863.884→ B:3759539.223→ M:505194.838→N:209°48′18.1″→F:-1/1045→D:-1/800→E:Goto 0 : Return:Ifend IF K<43636.692:Then 42863.884→A: 43636.692→ B:3759370.853→ M:505107.051→N:203°00′04.15″→F:R=-800:Goto2 : Return:Ifend IF K<43826.692:Then 43636.692→A: 43826.692→ B:3758630.216→ M: 505167.591→N:147°39′10.35″→F: -1/800→D:E=-1/1045→E :Goto 0 : Return:Ifend IF K<44825.092:Then 43826.692→A: 44825.092→ B:3758478.338→ M: 505281.555→N:140°50′56.4″→F:-1/1045→D:-1/1045→E: Goto 0 : Return:Ifend IF K<45025.092:Then 44825.092→A: 45025.092→ B:3757704.093→ M: 505911.911→N:140°50′56.4″→F: 1/1045→D:1/1000→E:Goto 0 : Return:Ifend IF K<45300.109:Then 45025.092→A: 45300.109→ B:3757544.945→ M: 506032.892→N:146°34′42.88″→F:R=1000:Goto 2 : Return:Ifend IF K<45500.109:Then 45300.109→A: 45500.109→ B:3757297.588→ M: 506151.102→N:162°20′09.32″→F: 1/1000→D: 1/1045→E :Goto 0 : Return:Ifend IF K<45805.835:Then 45500.109→A: 45805.835→ B:3757103.485→ M: 506198.937→N:168°03′55.8″→F: 1/1045→D:1/1045→E: Goto 0 : Return:Ifend IF K<45980.835:Then 45805.835→A: 45980.835→ B:3756804.367→ M: 506262.160→N:168°03′55.8″→F: -1/1045→D: -1/1000→E:Goto 0 : Return:Ifend IF K<46136.333:Then 45980.835→A: 46136.333→ B:3756634.336→ M: 506303.312→N:163°03′07.63″→F:R=-1000:Goto 2 : Return:Ifend Lb1 0 (E-D)÷(Abs(B-A)) →P: Abs(K-A) →Q: F+(PQ+2D)Q×90÷∏→J F+(PQ÷4+2D)Q×45÷(2∏) →G F+(3PQ÷4+2D)Q×135÷(2∏) →H F+(PQ÷2+2D)Q×45÷∏→S:
缓和曲线常用计算公式
一、缓和曲线常数 1、 内移距P : 3420268824R l R l P n -= 2、 切垂距m : 2 302402R l l m -= 3、缓和曲线基本角: R l R l πβ000902== 3、 缓和曲线偏角: R l R l πδ000306== 5、缓和曲线反偏角: R l R l b π000603== 缓和曲线常数既有线元素,又有角元 素,且均 为圆曲线半径R 和缓和曲线 长0l 的函数。线元素要计算到mm ,角元素要计算到秒。 二、缓和曲线综合要素 切线长:()m P R T +?? ? ??+=2tan α 曲线长:()0022l R L +-=βα 外视距:R P R E -?? ? ??+=2cos 0α 切曲差:L T q -=2 曲线综合要素均为线元素,且均为转向角 α、圆曲线半径R 和缓和曲线长0 l 的函数。曲线综合要素计算到cm 。 三、缓和曲线任意点偏角计算
2020202902306Rl l Rl l Rl l Rl l t t t t t t πβπδ==== 0202603Rl l Rl l b t t t π== 实际应用中,缓和曲线长0l 均选用10m 的倍数。 四、偏角法测设缓和曲线遇障碍 ()()T B B T l l l l Rl 2610 +-=βδ ()()()()T F T F T F T F F l l l l Rl l l l l Rl 23026100 +-=+-= πδ —B l 为靠近ZH(HZ)点的缓和曲线长; —T l 为置镜点的缓和曲线长; —F l 为远离ZH(HZ)点的缓和曲线长。 五、直角坐标法 1、缓和曲线参数方程: 520 2401a a a l l R l x -= 30 373033661l R l l Rl y a a a -= 2、圆曲线 m R x b b +=αsin ()P R y b b +-=αcos 1 式中,b α为圆心O 到切线的垂线方向和到B 的半径方向所形成的圆心角,按 下式计算:
卡西欧fx-5800p计算器”单圆曲线计算“程序以及程序说明
单圆曲线(YQXJS) “KO”?O: “X0”?A:“Y0”?B:“JDX”?X:“JDY”?Y:“FWJ”?J:“FO”?F:?N:?R:6→DimZ←┘(K0为输入起算点桩号),(X0为输入起算点X坐标),(Y0为输入起算点Y坐标),(JDX输入曲线所在交点X坐标,无输入0),(JDY为输入曲线所在的Y坐标,无输入0),(FWJ为输入起算点的方位角),(F0为输入交点处的转角,带正负号,当左转时在转角前加-;右转时在转角前加+),(N为转角方向,正输入+1,负输入-1),(R为输入曲线半径)Abs(F)÷2→G◢“T=”:Rtan(G)→T◢(计算切线长) “L=”:GRπ÷90→L◢(计算圆曲线长) “E=”:R÷cos(G)-R→E◢(计算外距,即交点到QZ点的距离) LbI 1←┘ ?K:180N(K-O)÷(πR)→V:2Rsin(0.5NV)→M←┘(K为输入待求点的桩号)V为带求点与起算点间的弦长说对应的圆心角 “XZ=”:A+Mcos(J+0.5V)→Z[1]◢(计算出的中桩X坐标) “YZ=”:B+Msin(J+0.5V)→Z[2]◢(计算出的中桩Y坐标) tan-1((Z[2]-Y)÷(Z[1]-X))→U←┘ If U<0:Then U+360→U:Else U→U:If End←┘ “FW=”?U :U DMS◢(计算出的中桩与交点的方位角) ?W:“XL=”:Z[1]-NWcos(J+V+90)→Z[3]◢(W为输入路半宽,计算出的左边桩X坐标)“YL=”:Z[2]-NWsin(J+V+90)→Z[4]◢(计算出的左边桩Y坐标) “XR=”: Z [1]+NWcos(J+V+90)→Z[5]◢(计算出的右边桩X坐标) “YR=”:Z[2]+NWsin(J+V+90)→Z[6]◢(计算出的右边桩Y坐标) 特别注意: 1.进行反向计算(大桩号往小桩号计算)时,起算点桩号应设为0;待求桩号与起算点距离多远桩号就为多少; 3.起算点方位角应与起算点之前的线形所对应的方位角一致。
缓和曲线要素及公式介绍
11.2.1 带缓和曲线的圆曲线的测设 为了保障车辆行驶安全,在直线与圆曲线之间加入一段半径由∞逐渐变化到R的曲线,这种曲线称为缓和曲线。 目前常用的缓和曲线多为螺旋线,它有一个特性,曲率半径ρ与曲线长度l成反比。数学表达为: ρ∝1/l 或ρ·l = k ( k为常数) 若缓和曲线长度为l0,与它相连的圆曲线半径为R,则有: ρ·l = R·l0 = k 目前我国公路采用k = 0.035V3(V为车速,单位为km/h),铁路采用k = 0.09808V3,则公路缓和曲线的长度为l0 = 0.035V3/R , 铁路缓和曲线的长度为:l0 = 0.09808V3/R 。 11.2.2 带缓和曲线的圆曲线的主点及主元素的计算 带缓和曲线的圆曲线的主点有直缓点ZH、缓圆点HY、曲中点QZ、圆缓点YH、缓直点HZ 。
带缓和曲线的圆曲线的主元素及计算公式: 切线长 T h = q+(R+p)·tan(α/2) 曲线长 L h = 2l0+R·(α-2β0)·π/180° 外矢距 E h = (R+p)·sec(α/2)-R 切线加长 q = l0/2-l03/(240R2) 圆曲线相对切线内移量 p = l02/(24R) 切曲差 D h = 2T h -L h 式中:α为线路转向角;β0为缓和曲线角;其中q、p、β0缓和曲线参数。 11.2.3 缓和曲线参数推导 dβ = dl/ρ = l/k·dl 两边分别积分,得: β= l2/(2k) = l/(2ρ)
当ρ = R时,则β =β0 β0 = l0/(2R) 若选用点为ZH原点,切线方向为X轴,垂直切线的方向为Y轴,建立坐标系,则: dx = dl·cosβ = cos[l2/(2k)]·dl dy = dl·sinβ = sin[l2/(2k)]·dl 考虑β很小,sinβ和cosβ即sin(l2/(2k))和cos(l2/(2k))可以用级数展开,等式两边分别积分,并把k = R·l0代入,得以曲线 长度l为参数的缓和曲线方程式: X = l-l5/(40R2l02)+…… Y = l3/(6Rl0)+…… 通常应用上式时,只取前一、二项,即: X = l-l5/(40R2l02) Y = l3/(6Rl0) 另外,由图可知, q = X HY-R·sinβ0 p = Y HY-R(1-cosβ0) 以β0= l0/(2R)代入,并对sin[l0/(2R)]、cos[l0/(2R)]进行级数展开,取前一、二项整理可得:q = l0/2-l03/(240R2) p = l02/(24R) 若仍用上述坐标系,对于圆曲线上任意一点i,则i点的坐标X i、Y i可以表示为: Xi = R·sinψi+q Yi = R·(1-cosψi)+p 11.2.4 带缓和曲线的圆曲线的主点桩号计算及检核
SM2椭圆曲线参数选取
关于SM2椭圆曲线参数选取 一.安全的椭圆曲线的选取 1.椭圆曲线上的公钥密码体制的安全性是建立在椭圆曲线离散对数的基础上, 但并不是所有椭圆曲线都可以应用到公钥密码体制中, 为了保证其安全性, 必须选取安全椭圆曲线,即只有选到合适的有限域GF(p)和椭圆曲线(ECC),能够抵抗攻击ECDLP算法的攻击,才能保证所选ECC的安全性。 若某椭圆曲线存在优于n1/2级(n是基点阶次)计算复杂度的攻击方法,则称此曲线为弱椭圆曲线。Fp上的超奇异椭圆曲线(有限域Fp的特征整除q+1-#E(Fp))和Fp上的异常曲线(#E(Fp)=p)都是弱椭圆曲线。(国密局文档p4,p25A.4抗攻击椭圆曲线满足的条件)。下面是选取曲线时应遵循的原则:(一种椭圆曲线参数生成的快速算法) (1)为了抗击Pollard-ρ攻击,所选取椭圆曲线的阶#E(GF(p))的分解式中应该包含一个大的素数因子,目前应不小于160bit; (2)为了抗击Weil对和Tate对的攻击,对于1≤k≤30,n不能除p k-1(不宜选取超奇异椭圆曲线); (3)为了抗击Semaev-Smart-Satoh-Araki的攻击所选曲线的阶不能等于该曲线所定义的有限域的阶,即#E(F P)≠p(不宜选取异常椭圆曲线); (4)对于二进制域GF(2m)的度m不宜为合数。Gaudry,Hess和Smart提出,若m有小约数l(l=4),存在比Pollard's rho算法更
快求解ECDLP的方法。 (5)选择GF(p)的子域H,满足它的阶|H| 是#E 的最大素因子n,并在H 上实现ECC。 2.一般来说有4 种寻找安全椭圆曲线的方法:(椭圆曲线密码体制及其参数生成的研究.2006.DR) (1) 有限域GF( p) 上随机生成一椭圆曲线, 直接计算其阶, 判断阶是否为大素数或含大素数因子, 若是即确定,否则继续选取曲线, 直至符合条件。 (2) 取具有一定特殊性椭圆曲线的系数, 计算该椭圆曲线的阶, 对该阶进行判断, 直至找到所需要的安全曲线。 (3) 如果p = 2m , 其中m 能被一个比较小的整数d 整除, 首先在有限域GF( p1 ) ( p1 = 2 d ) 上选择一椭圆曲线E,并计算其阶, 根据此值, 利用Weil 定理[ 2] 计算该曲线在其扩域GF( p) 上的阶, 若此阶符合安全标准, 再找曲线E在域GF( p) 上的嵌入E, 则E 即为所需的安全椭圆曲线。 (4) 首先给出具有安全条件的曲线阶, 然后构造一具有此阶的椭圆曲线。目前国内外比较流行的计算椭圆曲线阶的算法有complex multiplication 算法、SEA 算法、Satoh 算法。应用广泛的椭圆曲线公钥密码体制( ECC) 中大多是基于特征2 的有限域上。 3.尽管ECC的参数选取方法有许多种,应用最多的是随机选择方法,它是根据任意给定曲线的系数,计算曲线的阶直到找到素数(或近素数)阶的椭圆曲线。
一般圆曲线计算程序(5800P)
一般圆曲线计算程序(5800P) (五)圆曲线坐标计算程序(xx-03-2519:27:05)转载▼标签:杂谈 五、圆曲线坐标计算程序:1、Deg:Fix 32、Lbl 0:3、“K0=”?K:?X:?Y:?A:?R4、“L=- 1,R=+1”:?G5、“ZS=0,FS≠0”:?S6、S≠0 =>Goto 17、“Ki”?Z8、90(Z-K)(πR)→B9、2R sin B→D 10、“Xi=”:X+Dcos (A+GB)→P◢ 11、“Yi=”:Y+Dsin (A+GB)→Q◢ 12、A+180G(Z-K)(πR)→O 13、“ZBJ”?E 14、“XiL=”:P+Ecos(O-90)◢ 15、“YiL=”:Q+Esin(O-90)◢ 16、“YBJ”?F 17、“XiR=”:P+Fcos(O+90)◢ 18、“YiR=”:Q+Fsin(O+90)◢ 19、 Goto 0 20、 Lbl1 21、 “XC”?U:“YC”?V22.X+Rcos(A+90G)→M23.Y+Rsin(A+90G)→N 24、Pol(U-M,V-N)→H
25、J<0 =>J+360→J 26、“PJ=”:R-H→L◢ 27、“XCCZ=”:M+Rcos(J)→T◢ 28、“YCCZ=”:N+Rsin(J)→W◢29 、Pol(T-X,W-Y)→Z 30、“CZZH=”: K+sin-1(Z2R)πR90◢ 31、 Goto 0说明:1、设置小数保留三位。2、程序03、赋值起点桩号K0,赋值起点坐标X、Y,赋值半径R,赋值起点走向方位角A。4、赋值曲线转向,左转为-1,右转为+1。5、选择正算S=0,或反算S≠0、6、如果S≠0,进入反算程序。7、正算程序:输入所求桩号Ki。8、计算弦切角B。9、计算弦长D。 10、计算中桩坐标Xi并显示。 11、计算中桩坐标Yi并显示。 12、计算i点走向方位角O。 13、输入左边桩距中桩的距离E。 14、计算左边桩坐标XiL并显示。 15、计算左边桩坐标YiL并显示。 16、输入右边桩距中桩的距离F。 17、计算右边桩坐标XiR并显示。 18、计算右边桩坐标YiR并显示。 19、到程序0。 20、反算程序1。 21、输入测量坐标X