智能小车的路径识别问题
智能小车的路径识别问题
摘要:智能小车路径识别技术是系统进行控制的前提,介绍了路径识别技术的几种分类及相应的优缺点,通过分析得出面阵CCD摄像更适合作为采集信息的工具。
关键词:智能小车;路径识别;面阵CCD摄像器件
Abstract: Smart car’s path recognition technology is the premise of the control system, this paper introduces the path of several classification and recognition technology, through the analysis of the advantages and disadvantages of the corresponding to array CCD camera is more suitable for gathering information as the tool.
Key words:smart car; Path recognition; Surface array CCD camera device
0 引言:为培养大学生的自主创新设计的能力,各大高校都设置了智能车比赛,智能小车
行驶在给定的白色路面,由中间的黑色轨迹线引导,实现自主循迹功能。实现该
功能的小车主要由电源模块、循迹模块、单片机模块、舵机模块、后轮电机驱动
模块组成。路径模块一般由ATD模块,外围芯片和电路,与路面信息获取模块
组成,要能够快速准确得进行路径识别检测及相关循迹算法研究,本文就这两个
方面进行相应的分析和介绍。
1 光电传感器
1.1 反射式红外发射接收器
半导体受到光照时会产生电子-空穴对,是导电性能增强,光线愈强,阻值愈低。这种光照后电阻率变化的现象称为光电导效应[1],用于路径检测的反射式红外光电传感器基于此原理设计。该传感器一般由一个红外线发射二极管和一个光电二极管组成,可以发射并检测到反射目的光线。不同颜色的物体对光的反射率不同,当发射出的红外光对准黑色物体时,反射的红外线很少,光电二极管不能导通,反之,当对准白色物体时,光电二极管导通[2]。系统的单片机接收到光电二极管的信息根据相应的算法分析出小车此时的位置及位置偏离度,进而控制小车的方向和速度。
光电式传感器是通过对光的测量通过光电元件转化为电信号,并输出有效的输出量,由于外界光电因素的原因导致空间分辨率低是每个红外传感器存在的缺点,因此必须对原始传感器信息进行预处理,取相对值是一种有效解决外界干扰的方法,即将传感器未发射红外线时的A/D转换值进行提取,再与红外线时的转换值取相对值。文献[2]同时也提出了如何根据每个传感器的相对值与传感器位置推断出车模相对于黑色引导线的横向偏移位置。而文献[3]中所描述的方法与文献[2]有异曲同工之妙,文献[4][5]也对光电传感器的路径算法有详细科学的介绍。
1.2光敏电阻阵列传感器
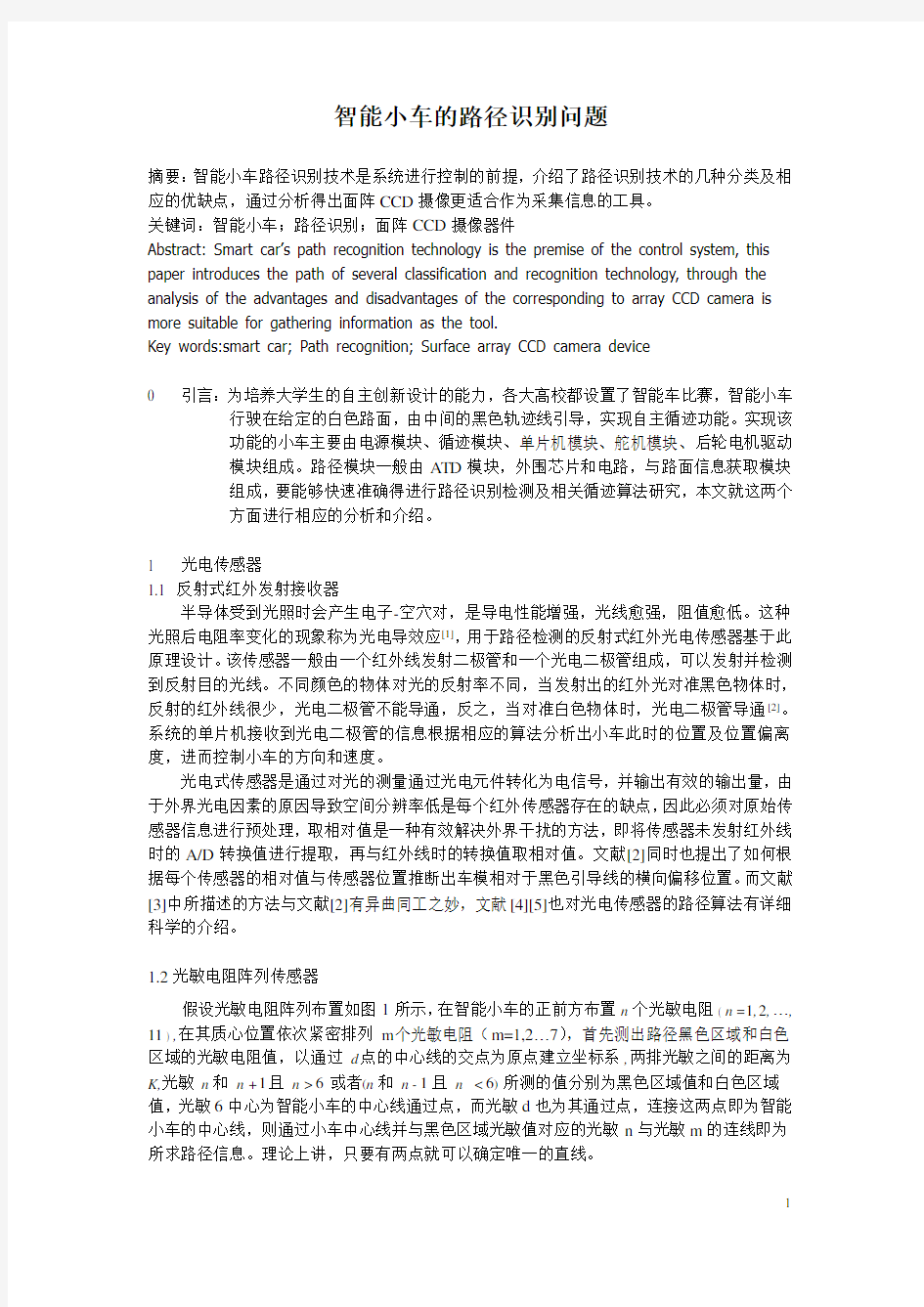
假设光敏电阻阵列布置如图1所示,在智能小车的正前方布置n个光敏电阻( n=1,2,…, 11 ) ,在其质心位置依次紧密排列m个光敏电阻(m=1,2…7),首先测出路径黑色区域和白色区域的光敏电阻值,以通过d点的中心线的交点为原点建立坐标系,两排光敏之间的距离为K,光敏n和n+1且n>6或者(n和n-1且n<6)所测的值分别为黑色区域值和白色区域值,光敏6中心为智能小车的中心线通过点,而光敏d也为其通过点,连接这两点即为智能小车的中心线,则通过小车中心线并与黑色区域光敏值对应的光敏n与光敏m的连线即为所求路径信息。理论上讲,只要有两点就可以确定唯一的直线。
设路径标线的中心线在以小车质心为原点的坐标系中的方程为y=ax+b, 其中a为路径标线中心线在图像坐标系中的斜率, b 为路径标线中心线在纵轴上的截距,如图2所示,通过光敏传感器m和光敏n的位置确定参数a和b,并且可以确定路径标线在坐标系中的位置偏差参数( e)和方向角参数(α) , e = n r, α =a rctan ( a / b) ,这两个参数可作为控制系统的输入量,以控制小车对运行路径的跟踪[6]。
图1 传感器阵列布置图2 系统坐标图
基于光电传感器设计的循迹电路还有二极管+光敏电阻等形式,其原理都是利用光的不同引起相应电的变化进行设计,其响应速度都很快,但这类电路由于对光的依赖相当大,导致光照对电路实现的影响显著,很容易造成检测失误,从而小车的整体运行出现偏差,并且,占用CPU端口资源较多,安装固定、接线困难,传感器都是仍存在差异的,导致测量结果出现偏差,再且,光电传感器之间的信息无法相互传递,从而对系统运行也会产生不利影响。光电传感器检测到前方10~15cm的信息,前瞻性较差,控制系统难以做好及时改变的应对措施,速度难以加快,性能不稳定,虽然采用了脉冲发射红外线提高检测长度,但相比于后面介绍的摄像头前瞻性依然有待改善。
2图像传感器
2.1 CCD摄像
图像传感器是电荷转移器件与光敏阵列原件集为一体构成的具有自扫描功能的摄像器件。它与传统的电子束扫描真空摄像管相比,具有体积小、重量轻、使用电压低(<20V)、可靠性高和不需要强光照明等优点。图像传感器的核心是电荷转移器件,其中常用的是电荷耦合器件CCD[7]。CCD图像传感器通常分为线阵CCD图像传感器和面阵CCD图像传感器。
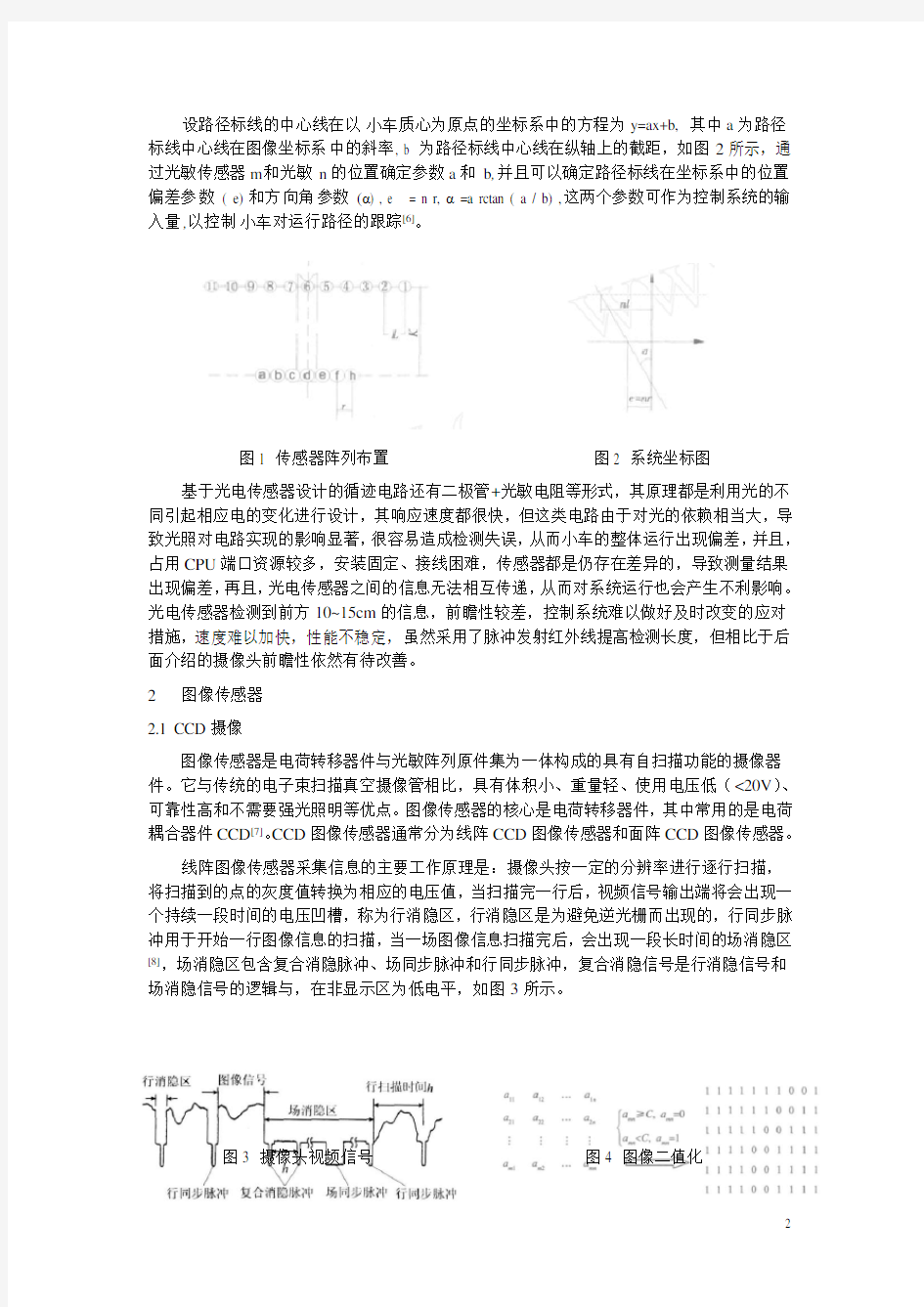
线阵图像传感器采集信息的主要工作原理是:摄像头按一定的分辨率进行逐行扫描,将扫描到的点的灰度值转换为相应的电压值,当扫描完一行后,视频信号输出端将会出现一个持续一段时间的电压凹槽,称为行消隐区,行消隐区是为避免逆光栅而出现的,行同步脉冲用于开始一行图像信息的扫描,当一场图像信息扫描完后,会出现一段长时间的场消隐区[8],场消隐区包含复合消隐脉冲、场同步脉冲和行同步脉冲,复合消隐信号是行消隐信号和场消隐信号的逻辑与,在非显示区为低电平,如图3所示。
图3 摄像头视频信号图4 图像二值化
智能小车的视频信号输出后,需要进行二值化处理和视频信号的分离,为有效得将消隐脉冲和同步脉冲从视频信号中提取出来,需要进行信号分离。由于A/D转换的速度很慢,不能及时有效得分离出信号,因此可以根据一款专门分离信号的芯片LM1881可以准确快速地实现提取相应的信息。
摄像头完成一场图像的采样后,就得到了一张一场图像的离散路径采样值的二维坐标图,取坐标图的右上角为坐标原点(1,1),然后根据黑白阀值的设置对图像灰度值进行二值化处理,获取道路的有效信息。处理过程如图4所示,a mn代表第m行第n列点的A/D值,m=20,n=70,C为黑白阀值,1为白点,0为黑点。从图中可看出二值化的道路信息很清晰, 但在实际情况当中, 道路中可能会出现与导引线颜色相近的一些杂点, 这会干扰导引线的提取。因此,采用中值滤波对干扰点滤除, 即对每个黑点周围的若干个数据点求平均值, 按照给定阀值进行判断, 从而有效滤除黑色孤点和噪声干扰, 保留连续的中心黑点, 保证了导引线的平滑性[9]。
图像信息采集的过程中,杂波是不可避免的,拿一行视频信号为例,采集到的60个数据逐个转换为0和1存储到一个一维数组中,这个数组是一个0和1组成的序列,1代表白色,0代表黑色。但系统计算出来的0和1不可能都是准确无误的,视频信号中都会带有一定的杂波,如果不滤除的话,路径判断会出现错误。文献[10]有详细介绍滤波函数的主要原理,对于检测出的一组序列含有10个以上的数据,但其中有一个到两个数据与另外的数据不同,则将这不同的数据进行取反操作,即认为这一两个数据属于杂波。在实验中得到测试结果,当检测到路径信息时, 数组中0的个数一般不会低于3个, 所以, 滤除一个和两个杂波数据并不会影响到正常的路径识别, 而同时出现3个杂波数据而且又处于相临的位置,
这样的可能非常微小, 可以忽略不计。事实证明, 这个方法既可以滤除赛道上的杂波信号, 也可以滤除路径上的杂波信号,效果很显著。另外一种滤除杂波的方法是利用数学形态学[11]。
根据所提取出的图像信息确定黑线位置常用的方法有逐行扫描法、边缘捕捉法和区域搜索法,采用逐行扫描法容易把周围的颜色误认为是黑线,并且在一定程度上比较耗时,利用边缘捕捉法,从采集到的某行数据的中心点开始,判断该点是否为黑点,若是黑点,则从该中心点依次向右检测,若检测到连续2个或3个都是白点,且相应的A/D值之差大于设定的阈值时,则记下最后一个黑点的位置并记录下来,再从该中心点依次向左开始检测,同样记录下最后一个黑点的位置并记录下来,两次的位置求平均即为黑线中心位置,若检测不到预测的点,则该组数据作废。另一种情况是检测到的中心点为白点,则从该中心点依次往右检测,若出现的情况是从白到黑再出现黑到白的情况则记录这两次变化的位置值,求其均值即为黑线中心点位置。若出现全黑或全白,则该组数据作废[12]。文献[12]中存在的漏洞在于作者检测到边缘时没有进行多次检测,从而导致检测失误的概率增大,造成了判断失误。边缘捕捉法是通过判断上升沿和下降沿的位置来计算黑线的位置,并检测数据是否满足对应的A/D值来减小误差。边缘捕捉法具有对黑线反应灵敏、准确度高、抗干扰能力强等优点。
很多情况下将两种或三种算法同时使用,可以大大提高运行的速度和精度,例如文献[13]中,用边缘检测的方法提取出前10行的黑线位置,当前10行黑线存在时,利用前10行的位置确定第11行黑线的位置,然后在这个区间搜索黑线,以此类推用前一行黑线的位置确定后一行黑线的位置,即采用区域搜索法进行检测,当本行黑线没有找到时,此时黑线位置保持上行的值,下行搜索的位置相应的扩大,有连续三行搜索不到黑线时判定为黑线丢失,推出搜索。这样既可以去除干扰,还可以大大提高算法的效率。
2.2CMOS摄像
CMOS摄像器件内部结构主要由感光元件阵列、灵敏放大器、阵列扫描电路、控制电路、时序电路等组成。CMOS工作的基本原理是将光信号转变为模拟信号电压,其功耗和成本较之于CCD摄像器件要低,但其灵敏度和分辨率没有CCD摄像器件好,在预定的黑线导引轨道上,系统对于路面图像的分辨率要求不需要很高,而降低图像分辨率能减少图像存储占用的空间,加快图像处理速度,而且仍有足够的信息来控制小车的行驶[14]。
文献[15]处有一种黑线提取的策略,由于黑线处的灰度值一般在10左右,但由于摄像头采集的数据都存在杂波,因此只有连续两个像素点的灰度值都是10左右的才被定为实际的黑点信息,然后通过对黑点所在的坐标取平均值即得到黑线的中心坐标。中心坐标位置
x=(x(1)+...+x(n))/n。文献[16]中详细介绍了三维的基于线性识别算法,其准确度和确定性都有一个明显的改善。
CCD摄像器件和CMOS摄像器件都是通过摄像头获取路面图像信息,通过对图像信息的处理获得所需要的信号,进而分析路面信息,位置偏离情况等,并通过相应的微处理器进行控制。如表1所示为这两种摄像器件的比较。可以看出这两种摄像器件都各有优缺点,但针对于本文特定的路径信息,笔者认为CCD摄像器更适合于小车的路径识别,能够很准确的进行图像采取,前瞻性好,虽然图像处理的速度比较慢,但可以通过相应的算法加以改善。在此基础上,系统有更大的潜力进行速度的提高,而不至于担心小车运动过程中会偏离轨道。
表1 CMOS与CCD摄像器件的对比
3电磁导航
电磁导航系统是近些年新发展出的一种技术,在临床医学、农用中存在相对于光学导航存在明显的优势,它不受外界光照因素的影响,在显微神经外科手术[17]、脊柱外科[18] 中生活导航[19]以及农业中搬运货物[20]中都有详细的介绍。在本文所描述的已知既定的路面环境下,根据黑线上附带的磁场判定方向,从而实现小车的运行。
根据法拉第电磁感应定律,在通有交变电流的导线周围放一线圈,则线圈两端将产生感应电动势。并且,在导线电流的变化率、线圈的匝数、线圈的截面积不变的情况下,线圈中感应电动式的大小与两者之间距离成反比。
将两只电磁感应传感器以一定距离对称的安装在机器人前端底部,可以测得机器人偏离
引导线中心时两只磁感应传感器输出电压的差值,从而得出机器人偏离引导线的数值[21]。图5为传感器工作原理示意图。
图5 传感器工作原理示意图
由于电磁感应的限制,电磁导航的智能小车依然存在前瞻性较差的现象。
4结束语
本文通过对智能小车路径识别的多种不同方式方法进行研究,得出如下结论:光电传感器空间分辨率低,系统性能不稳定,尽管其反应速度快,但设计要求的是在小车稳定运行的前提下实现速度的提高,而电磁导航也存在前瞻性差,受干扰性大的缺陷,因此,CCD摄像头分辨率高,灵敏度高,算法的适合可以对速度控制加以改善,更符合设计要求。
参考文献
[1,7]贾伯年,俞朴,宋爱国.传感器技术.南京:东南大学出版社,2007
[2]雷钧.光电自动循迹智能车控制系统的开发.苏州大学学报(工科版),2009,29(6)
[3]石振东,吕科,喻清洲等.基于红外路径识别的智能车控制系统设计.湖北汽车工业学院学报,2007,21(3)
[4]梁业宗,李波,赵磊.基于路径识别算法的智能车控制系统的设计.自动化技术与应
用.2009,28(1):121-123
[5]Ernesto Martín Gorostiza *, JoséLuis Lázaro Galilea, Franciso Javier Meca Meca, David Salido Monzú , Felipe Espinosa Zapata and Luis Pallarés Puerto.Infrared Sensor System for Mobile-Robot Positioning in Intelligent Spaces.sensors.2011,11:5416-5438
[6]廖华丽,周祥,董丰等.基于模糊控制的A VG寻迹算法.哈尔滨工业大学学报,2005,37(7)
[8]温阳东,王祥好.基于线阵CCD的智能小车路径识别系统.合肥工业大学学报(自然科学版).2009,32(9)
[9]田瑶,刘晓邦,瞿少成等.基于CCD摄像头的智能小车系统的研制.电子测量技
术.2010,,33(6)
[10]史晓杰,杨公源.智能小车路径识别的设计和算法.仪器仪表用户.2010,5(15):28-29
[11]张琳琳,段中兴.基于嵌入式的移动机器人导航算法研究.工业控制计算
机.2010,23(6):65-66
[12]王文杰,凌六一.基于摄像头的智能车控制系统的设计.科技资讯.2009,26
[13]段振兴.基于MC9S128的摄像头导航智能车的设计与实现.甘肃科技纵
横.2011,40(3):11-13
[14]唐建文.基于CMOS摄像头的智能小车导航控制.装备制造技术.2010,6:184-185
[15]毛堃,樊月珍,钱桦等.基于CMOS数字摄像头检测路径的智能小车计.微计算机信息(嵌入式与SOC).2010,26(7-2):196-197
[16]Dong-Young Yoo · Jin Young Choi · Jae-Kyu Lee ·Seongjin Ahn · Jin Wook Chung.Spatial Modelling for Mobile Rob ot’s Vision-based Navigation.J Intell Robot Syst,2011,63:131-147
[17]杨立斌,顾建文,屈延等.电磁导航与术中实时超声在显微神经外科手术中的应用.西部医学,2008,20(5):927-929
[18]张海强,狄鸥,宋国庆等.InstaTrak3500 Plus电磁导航系统Fluoro Trak程序的临床应用.医械临床.2009,30(7):78-79
[19]孙强,胡晨.手持式导航仪电源EMI设计.电子器件.2008,31(2):623-625
[20,21]郭丽君.基于LabVIEW的温室移动机器人导航系统.农机化研究.2011,3:182-185
智能小车的路径识别问题
智能小车的路径识别问题 摘要:智能小车路径识别技术是系统进行控制的前提,介绍了路径识别技术的几种分类及相应的优缺点,通过分析得出面阵CCD摄像更适合作为采集信息的工具。 关键词:智能小车;路径识别;面阵CCD摄像器件 Abstract: Smart car’s path recognition technology is the premise of the control system, this paper introduces the path of several classification and recognition technology, through the analysis of the advantages and disadvantages of the corresponding to array CCD camera is more suitable for gathering information as the tool. Key words:smart car; Path recognition; Surface array CCD camera device 0 引言:为培养大学生的自主创新设计的能力,各大高校都设置了智能车比赛,智能小车 行驶在给定的白色路面,由中间的黑色轨迹线引导,实现自主循迹功能。实现该 功能的小车主要由电源模块、循迹模块、单片机模块、舵机模块、后轮电机驱动 模块组成。路径模块一般由ATD模块,外围芯片和电路,与路面信息获取模块 组成,要能够快速准确得进行路径识别检测及相关循迹算法研究,本文就这两个 方面进行相应的分析和介绍。 1 光电传感器 1.1 反射式红外发射接收器 半导体受到光照时会产生电子-空穴对,是导电性能增强,光线愈强,阻值愈低。这种光照后电阻率变化的现象称为光电导效应[1],用于路径检测的反射式红外光电传感器基于此原理设计。该传感器一般由一个红外线发射二极管和一个光电二极管组成,可以发射并检测到反射目的光线。不同颜色的物体对光的反射率不同,当发射出的红外光对准黑色物体时,反射的红外线很少,光电二极管不能导通,反之,当对准白色物体时,光电二极管导通[2]。系统的单片机接收到光电二极管的信息根据相应的算法分析出小车此时的位置及位置偏离度,进而控制小车的方向和速度。 光电式传感器是通过对光的测量通过光电元件转化为电信号,并输出有效的输出量,由于外界光电因素的原因导致空间分辨率低是每个红外传感器存在的缺点,因此必须对原始传感器信息进行预处理,取相对值是一种有效解决外界干扰的方法,即将传感器未发射红外线时的A/D转换值进行提取,再与红外线时的转换值取相对值。文献[2]同时也提出了如何根据每个传感器的相对值与传感器位置推断出车模相对于黑色引导线的横向偏移位置。而文献[3]中所描述的方法与文献[2]有异曲同工之妙,文献[4][5]也对光电传感器的路径算法有详细科学的介绍。 1.2光敏电阻阵列传感器 假设光敏电阻阵列布置如图1所示,在智能小车的正前方布置n个光敏电阻( n=1,2,…, 11 ) ,在其质心位置依次紧密排列m个光敏电阻(m=1,2…7),首先测出路径黑色区域和白色区域的光敏电阻值,以通过d点的中心线的交点为原点建立坐标系,两排光敏之间的距离为K,光敏n和n+1且n>6或者(n和n-1且n<6)所测的值分别为黑色区域值和白色区域值,光敏6中心为智能小车的中心线通过点,而光敏d也为其通过点,连接这两点即为智能小车的中心线,则通过小车中心线并与黑色区域光敏值对应的光敏n与光敏m的连线即为所求路径信息。理论上讲,只要有两点就可以确定唯一的直线。
路径识别代码
路径识别代码 识别是用来设定速度的。。。简单的识别还是容易,贴个代码。。。 其中gap值为极左极右差值,附 for(i=49;i>=(M_Row_End+3);i--) // recored_end_row { if(Black_Flag[i].Mid_flag&&Black_Flag[i-3].Mid_flag) { n = Runway_Midpoint[i-3] - Runway_Midpoint[i]; if(n>=2) S_right++; else if(n<=-2) S_left++; elseS_straight++; } } void Road_S_Dis(void) { prespeed_value = speed_value; if(curValidline<11) { if(gap<=24) //包括了直道和小S弯 { straight_flag++; straight_flag%=3000; } else if(gap<=65) //入弯口 { if(S_right>3&&S_left>3) Big_S = 1; elsebend_flag=1; } else {zhongsu++;zhongsu%=3000;}//较远前瞻的弯,给定中速 zhongsu3_flag = 0; danwan_flag = 0; } else if(M_Row_End<=22) { if(gap>=75||S_right>= (50-M_Row_End)-6||S_left>=50-M_Row_End - 6) {danwan_flag++;danwan_flag%=3000;} //单向弯道,给定中速2 else if(gap>=45) { if(S_right>3&&S_left>3) jiman_flag=1;//较近前瞻的S弯,给定慢速 else {zhongsu2_flag++;zhongsu2_flag%=3000;} //较近前瞻的缓慢程度弯道,给定中速
停车场车牌自动识别系统工作原理
近几年,一遇假期堵成狗,已成为中国现代交通的常态,为了改善这种现状,各地高速设置ETC专用通道,不少出行者反应,在ETC实现全国联网之后,使用ETC通道过高速收费站比以往减短的时间少了不止10秒钟,这也成为减少高速拥堵情况的一大原因。 ETC通道能实现快速汽车快速通过,自动栏杆机功能的重要性不言而喻,但是车牌自动识别技术也发挥不可替代的作用。近年来,车牌自动识别技术已被广泛应用于城市智能交通系统中,如闯红灯抓拍、超速行驶违章抓拍以及交通治安卡口系统等,尤其是交通治安卡口系统,其作为治安刑侦管理的重要科技手段之一,对车牌自动识别技术提出了更高的要求,促进了车牌自动识别技术的快速发展。 车牌识别技术(LicensePlateRecognition,LPR)是以计算机技术、图像处理技术、模糊识别为基础,建立车辆的特征模型,识别车辆特征,如号牌、车型、颜色等。它是一个以特定目标为对象的专用计算机视觉系统,能从一幅图像中自动提取车牌图像,自动分割字符,进而对字符进行识别,它运用先进的图像处理、模式识别和人工智能技术,对采集到的图像信息进行处理,能够实时准确地自动识别出车牌的数字、字母及汉字字符,并直接给出识别结果,使得车辆的电脑化监控和管理成为现实。 与传统的射频卡刷卡管理系统相比,车牌自动识别系统最大的优点是:第一、可以完全实现无干扰、不停车通行;第二、真正实现车辆一车一杆的通行管理要求,杜绝传车卡互换情况的发生;第三、实现车场管理收费的完全电脑化记录、统计,最大程度减少了停车费用的流失。
车牌自动识别流程 系统前端采用了嵌入式高清一体化摄像机,可实现百万级分辨率的视频和图片码流输出,内置了高性能DSP芯片,支持内置智能算法、可实现视频检测、车牌自动识别等功能。采用了动态视频识别技术,实现对视频流每一帧图像进行识别,从而达到增加识别比对次数,大大提高了识别的效率和准确率。 车辆牌照的自动识别主要是基于图像分割和图像识别理论,对含有车辆号牌的图像进行分析处理,从而确定牌照在图像中的位置,并进一步提取和识别出文本字符。 识别的具体步骤分为车牌定位、车牌提取、字符识别。在自然环境中,相机首先对采集到的视频图像进行大范围相关搜索,找到符合汽车牌照特征的若干区域作为候选区,然后对这些侯选区域做进一步分析、评判,最后选定一个最佳的区域作为牌照区域,并将其从图象中分割出来。 完成牌照区域的定位后,再将牌照区域分割成单个字符,然后进行识别,车牌识别算法采用基于模板匹配算法,首先将分割后的字符二值化,并将其尺寸大小缩放为字符数据库中模板的大小,然后与所有的模板进行匹配,最后选最佳匹配作为结果,通过这种多次比对的
车牌自动识别方案.(DOC)
目录 目录 (1) 第一章设计说明 (2) 一、前言 (2) 二、公司简介 (3) 三、设计思路 (3) 第二章系统概述 (5) 一、系统的组成 (5) 二、系统的特点 (5) 三、技术参数 (5) 第三章系统工作流程图、配置图 (6) 一、流程图 (6) 二、入场流程图: (6) 三、出场流程图: (7) 第四章系统主要产品简介 (9) 一、自动快速道闸 (9) 二、数字式车辆检测器 (9) 三、出、入口控制机 (9) 第五章车牌自动识别简介 (10) 一、车牌识别系统的施工定位及安装 (10) 二、车牌识别技术参数 (12) 第六章系统软件功能简介 (13) 一、管理功能设定 (13) 二、系统自维护功能: (16) 三、理财功能: (16) 四、系统软件组成: (17) 五、系统软件特点: (17)
第七章售后服务 (17) 一、咨询服务 (17) 二、维修服务 (17) 三、更新服务 (18) 第一章设计说明 一、前言 首先感谢贵公司对我公司的信任,让我们参与小区停车场的智能管理收费系统设计、选型工作。随着中国经济的高速发展,汽车增长迅猛,出现了停车难、管理难的社会问题,同
时,人们的居住与办公环境也在不断改善,智能大厦、小区已逐步开始普及。在智能大厦、小区的规划建设中,有一个非常重要的内容,就是停车场的智能化、现代化管理系统的建设。一个好的停车场除了必须有合理的交通设施组织规划外,还应具备先进的硬件管理设备,以保证车辆进出快捷顺畅、安全有序;同时还需要完善的管理软件,以保证管理科学、收费公正合理、资金不流失,以维护消费者的合法权益,保护投资者的利益。基于目前现状,我公司已研制开发出具有先进科学水平的停车场管理系统以供选择。 二、公司简介 公司具有独立的法人资格,在停车场智能化管理系统和停车场交通设施行业中,是全国最具有规模的专业公司,从研发设计、生产、销售、施工、服务,每个环节都是我公司自行完成,采用材料保证质量,符合国家标准。自成立以来,上海丽装秉承技术领先优势,在停车场智能管理系统的软、硬件方面,已经突破了芯片、集成电路、控制系统、软件开发等一大批系统设备国产化的技术瓶颈,开发出了拥有自主知识产权的智能电动道闸,入口控制机和读卡控制机,系统管理软件及联网管理软件,图象处理软件,自动出卡机构、入口控制机外观、读卡控制机外观、智能电动道闸等外观设计;“停车场智能设备、交通设施”均被中国技术监督情报协会确认为“中国质量过硬服务放心信誉品牌” 三、设计思路 1、项目概况:该项目的停车场有6个出入口,设计为3进3出。根据停车场的使用和管理要求,保证车辆安全、快捷的进出、停泊,完整的记录车辆进出的各类数据,提高停车场管理的智能化程度,确实完善该项目的配套服务功能是本次方案深化设计的主要出发点。 2、依据规范: 1、《智能建筑设计标准》GB/T50134-2000 2、《民用建筑电气设计规范》JGJ/T16-92 3、《安全防范工程与要求》GA/T75-94 4、《防盗报警控制器通用技术条件》GBI2663-90 5、《建筑电气工程施工质量验收规范》GB50303-2002 6、《智能建筑工程质量验收规范》GB50339-2003 3、管理模式:鉴于项目的实际情况,我们将车库设计为1进1出的车牌自动识别管理模式,将出口控制机、出口管制自动道闸设置在出口通道的直通道起步位置,在抓拍车牌时要
基于摄像头的最佳道路识别及赛车控制算法 飞思卡尔
基于摄像头的道路识别及赛车控制算法 杨运海周祺吕梁 摘要:本文探讨了摄像头在智能车道路识别中的应用,并提出了一种通用的控制算法。在准确采集图像的基础上,利用临近搜索法对有效道路信息进行快速提取,通过分析赛道信息,计算出赛道黑线的走向趋势及赛车当前位置。在充分考虑当前和过去的赛道信息的基础上,对赛道类型进行判断及分类。在综合考虑赛道类型,黑线走向及车当前位置,对舵机的转向和电机的速度进行精确控制。 关键词:图像采集;临近搜索;转向控制,速度控制 1.概述 在飞思卡尔智能车汽车比赛中,路径识别方法主要有两大类,一类是基于红外光电传感器,令一类是基于摄像头。通常,红外光电传感器安装灵活,原理简单,可靠性好,不易受环境光干扰,因而得到了广泛应用,但其对前方道路的预判距离非常有限,不适宜赛车高速行驶。另一类是基于摄像头,与光电传感器相比,其优点非常明显,能提前获取大量前方道路信息,有利于实现赛车的最优控制。但其缺点是图像采集要求有高的AD转换频率,图像处理算法复杂度高,且容易受环境光的干扰。考虑到摄像头的优点远大于其缺点,因此选择了摄像头。以下是摄像头的工作流程图: 图B-1 摄像头工作流程
摄像头控制赛车行驶方案有三大模块:图像采集、赛道信息提取、转向和速度控制。 2.图像采集 考虑到S12的运算能力,我们采用了黑白制式、320*240的CMOS单板摄像头。摄像头出来的是模拟信号,每秒有50场图像,场之间有场消隐信号,行之间有行消隐信号,经过lm1881分离后,可得到场同步信号和行同步信号,作为行中断信号。由于行中断中要采集该行的信号,对时间要求很严格,其中断优先级应比普通中断的优先级高,因此我们选择IRQ作为行同步信号输入口,PT0作为场信号输入口。此外,为保证图像不丢失,我们仅对场信号的下降沿进行捕捉。 图B-2 摄像头视频信号 按照目前车的刹车时的加速度,我们选定图像拍摄最远处为前方1米就足以对速度做出了控制。考虑到前轮到前方20cm为摄像头的盲区,故有效拍摄范围为0.8m,为了保证不丢失起跑线,每2.5cm至少拍摄一行,故一幅图像至少采集32行。为了稳妥起见,我们选择了ROW=45行。摄像头最前方拍摄的宽度为80cm,而黑线宽度为2.5cm,故一行至少采集32,为了稳妥起见,一行采集的点数定为COL=45个点。 正常情况下,S12的AD频率不能超过2M,转化一个点需要14个周期,如果不超频,一行将只能采集8个点(24M主频时)。将分频系数设为0,此时AD 频率为12M。在行采集过程中,我们通过查询方式来判断AD是否转换完成,并对AD转换时间进行了记录,发现记录到的时间恰是期间指令执行一次的时间,这表明,影响一行采集的点数已不是AD的频率,而是执行指令的时间,因此采集过程中不需要查询A TDSTA T0的标志位,只需要通过执行一定数量的NOP空操作指令延时即可。例如采集47个点需要时,每个点的时间间隔是53us/47=1.125us,对应的指令周期数为1.125*24=27。通过反编译知读写等指令本身有13个指令周期,故令加14个NOP指令即可实现。 由于摄像头的角度关系,拍摄是不均匀的,而是前方疏,近处密。为了保证采集的均匀,采集的行之间间隔的行数就不能相同。摄像头的有效行数为285行左右,具体关系如下表: 行采集计数器line 摄像头行计数器row 备注 0 0 每3行采集一行
高速公路路径识别标识站车牌识别准确率验证方法——以武汉中交沌
高速公路路径识别标识站车牌识别准确率验证方法——以武汉中交沌口长江大桥为例 发表时间:2018-10-16T17:04:17.137Z 来源:《防护工程》2018年第11期作者:王兴国1 王庆晖2 [导读] 笔者借助湖北省高速公路收费站综合管理系统、冗余标识点等方法,解决了该项目验证车牌识别设备的捕捉率、识别正确率的难题,为其他不设收费站的高速公路运营模式提供参考,为无人收费模式的可行性提供了新的探索。王兴国1 王庆晖2 武汉中交沌口长江大桥投资有限公司武汉 430119 摘要:随着我国高速公路路网规划的不断完善,形成了复杂的环网结构,为了解决收费、清分争议问题,保障高速公路使用者和投资主体的利益,各省高速公路采用了最短路径法、最小费额法、统计概率法、车牌识别法和RFID标识站法等方法。本文以采用车牌识别法来实现精确路径识别的武汉中交沌口长江大桥为研究对象,该项目因不设立收费站,加大了验证车牌识别设备捕捉率、识别正确率的难度。笔者借助湖北省高速公路收费站综合管理系统、冗余标识点等方法,解决了该项目验证车牌识别设备的捕捉率、识别正确率的难题,为其他不设收费站的高速公路运营模式提供参考,为无人收费模式的可行性提供了新的探索。关键词:车牌识别法;高速公路;牌照识别设备;捕捉率、识别正确率;验证截至2016年底,我国高速公路通车里程已超过13万公路,有10个省高速公路通车里程达到5000公里以上,高速公路业主单位也达到了1500余家。随着各省高速公路建设规模和密度的扩大,形成的复杂环网和二义性路径数量也在逐年增加。在联网收费的路网中,从起点出发,到达目的地,可以有多条不同的路径(多义性路径)供选择。没有路径信息,无法按实际行驶路径来收费,造成高速公路所有者利益分配不公,成为联网收费的核心问题(多义性路径检测问题)。高速公路联网收费环境下的多义性路径检测本质是解决两个问题:一是对车主而言,按照哪一个路径路线的标准收取通行费;二是对多义性路线环上各高速公路投资主体而言,如何拆分收取的通行费。 针对多义性路径的问题,目前主要有两类识别方式,一类是精确路径识别,主要有无源电子标签识别法(RFID)、车牌照识别法、停车标识站法,另一类是概率识别法,主要有布瑞尔交通分配法、路网平衡法、最短路径法、最大概率法、协商法等。 在我国,各省高速公路多采用在多义性路网的关键点位布设路段标识点采集路径标识信息,结合收费站牌识系统的入口信息、出口信息,在车辆驶出高速公路时完成多义性路径的精确检测/识别,识别结果关联车辆收费记录;收费中心管理系统对多义性路径精确识别的车辆通行费进行精确清分,对小概率的无法识别的多义性路径车辆多采用概率法或最短路径法清分。 一、各类识别法优缺点分析 概率识别法,无法精确识别车辆行驶路径,其缺点是对于高速公路使用者及各投资主体来说,无法精确了解收费及清分是否公平合理。对于路网不复杂、投资主体单一的高速公路适用;其优点是费用低、相对公平合理,也经常用于未能精确路径识别车辆收费、清分。 对于精确清分主要介绍下有无源电子标签识别法(RFID)、车牌照识别法、停车标识站法三种。 1.停车标识站法 停车标识站是在主线建立收费站的方式,根据国务院办公厅2002年31号文件《关于治理向机动车辆乱收费和整顿道路站点有关问题的通知》要求,高速公路以及其他具备封闭条件的连续通行的收费公路,除两端出入口外,一律不得在主线上设置收费站。该方法目前已被淘汰。 2. 无源电子标签识别 利用RFID非接触式自动识别技术,在多义性路径关键节点架设标识站,在司机领取的复合通行卡上带有发射装置,在通过标识站时自动与接收装置通信,从而确定行驶路径,实现精确识别。优点是识别率高,不需要停车。缺点是复合卡成本高,联网通信投入大,且在识别时有被干扰的风险。 3.车牌照识别法 牌照识别系统利用视频车辆特征识别技术特点,即对动态场景中车辆的定位、识别和跟踪,其关键是车辆特征的捕获和识别。由于车辆号牌是车辆特征中具有唯一性的元素,通过对车辆号牌的识别和跟踪,可以有效地检测、识别、跟踪车辆。在高速公路网内存在多义性路径两点之间的主线路径断面上安装门架式车牌识别设备,通过车牌识别器采集、识别车辆的牌照号码,汇集至收费中心,通过清分模型比对进行通行费拆分账(图1)。 牌照识别系统可实现实时高清视频检测,当有车辆进入检测区域时,进行抓拍并对图片实时处理。在抓拍的图片中,车辆特征、车牌号码可清晰辨识。该系统具有识别速度快、可靠性高、工作环境的适应性强等特点,可以适应复杂的气候及光照条件,车牌识别率高,能适应大交通流量;多应用于高速公路、城市收费道路、交通违法检测、停车场等。 其优点是车牌捕捉率可达99%以上;车牌识别率高可达97%以上,不需要停车,建设成本较无源电子标签识别方式成本低廉。其缺点是受气候及环境影响大,联网通信投入大,无法解决无车牌车辆识别问题,对车牌污损的车辆识别率低。综合来看,车辆牌照识别法可做到精确路径识别,且建设成本相对较低,是目前流行的车辆路径识别方式。
智能小车毕业论文完整版
智能小车毕业论文完整 版 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】
学士学位论文 系别:计算机科学与技术 学科专业:计算机科学与技术 姓名: @@@@ @@@ 2011年 06月
智能小车引导控制系统 的设计与实现 系别:计算机科学与技术 学科专业:计算机科学与技术 指导老师: @@@ 姓名: @@@ @@@ 2011年 06月
智能小车引导控制系统的设计与实现 摘要:面对诸多恶劣的工作环境(如灭火、救援等),为了有效的避免人员伤亡,就需要采用智能小车去现场来完成相应的任务。因此研究和开发智能小车引导控制系统具有十分重要的意义。本系统采用STC89C51单片机作为核心控制芯片,设计制作了一款通过红外光电传感器检测路径信息、红外火焰传感器检测火源的智能寻迹灭火小车。本系统由单片机控制模块、寻迹传感器模块、驱动电机模块、火源传感器模块、风扇模块、电源模块等组成。实际应用表明,该小车可以在专门设计的场地上实现自主发现火源,自主识别路线,自主行进接近火源并灭火,最终完成灭火的任务。 关键词:单片机小车引导控制传感器
Smart cars guide control system design and implementation Abstract: Confronted with so many bad working environment (such as fire fighting, rescue etc), in order to effectively avoid casualties, need to use intelligent go by car scene to complete relevant tasks. Therefore, the research and development of intelligent car guide control system has the extremely vital significance. This system uses STC89C51 as the core control chip, design and make a new electric sensor detection by infrared sensor information, infrared flame path of intelligent tracing test fire extinguishing car. The system is composed of single-chip microcomputer control module, tracing sensor module, drive motor module, ignition sensor module, fan module, power supply module. The practical application indicates that the car can be in a specially designed field on fire, to realize the independent found autonomous recognition route, independent sources and marching close to the fire extinguishing, finally complete task. Keywords: Microcontroller Car Control system Sensors
单目视觉智能车路径识别及控制策略
单目视觉智能车路径识别及控制策略研究* 陈启迅 薛 静 (西北工业大学自动化学院 西安710072 )摘 要 研究了基于CMOS摄像头的图像采集方法,以及智能车赛道路径识别。提出了自适应差分边缘检测算法,采用取点求面积的方法提取指引线的相关参数。自适应差分边缘检测算法是在一般的边缘检测算法的基础上提出的,它能根据提取的左右边缘存在情况调整搜索范围、阈值,以及差值的求取方法。使用海伦公式求指引线上所取的三角形的面积, 据此提出了1种基于三角形面积的智能车速度控制方法,此方法以指引线上的三角形面积反映赛道的弯曲程度,并以此作为智能车速度控制的控制变量。 关键词 自适应差分边缘检测;智能车;图像采集;海伦公式 中图分类号:TP301.6 文献标志码:A doi:10.3963/j .issn 1674-4861.2012.05.006收稿日期:2012-07-04 修回日期:2012-09- 07 *西北工业大学研究生创业种子基金项目( 批准号:Z2011047)资助第一作者简介:陈启迅(1984),硕士生.研究方向:控制工程、系统工程.E-mail:cq x062014@126.com0 引 言 智能车辆系统是1个拥有感知环境能力,具备规划决策能力以实现自动行驶,并且可以实现多等 级辅助驾驶等功能于一体的综合系统[ 1 ]。与很多学科有着密切关系,如计算机、控制、通信、图像处 理、人工智能、信号处理等,同时也是多种传感器融 合的载体。因为它一般集中了摄像机、GPS、超声波雷达、激光雷达等多种传感器来感知周围环境, 并根据多传感器融合所获得的道路、车辆状态和障碍物信息进行控制车辆的转向和速度,从而使得车辆安全、可靠、稳定地在道路上行驶,因此智能车辆 是多学科综合于一体的高度智能化的产物[ 2- 3]。文献[4] 中介绍了一般差分边缘检测算法。文献[5 ]中描述了基于序列图像运动分割的车辆边界轮廓提取算法。文献[6]中提到了道路裂纹线检测中的脊波域图像增强算法。选用功耗低、前瞻性好的CMOS摄像头作为路径识别视觉传感器,采用自适应差分边缘检测算法有效地提取道路指引线,此算法具有很高的灵活性和适应能 力, 能够有效地降低干扰。进一步使用取点求面积的方法获取指引线参数。 1 视觉图像采集 1.1 硬件实现 CMOS视觉传感器图像采集电路[7] 见图1 ,LM1881可以实现视频同步信号的分离。2脚为视 频信号输入端;3脚和5脚分别为场同步、行同步信号输出端;7脚为奇偶场同步信号输出端,在此不使用。视频信号同时接入微处理器AD转换口 。 图1 视频同步信号分离电路 Fig.1 The circuit for separation of sy nchronizationsig nal of video1.2 软件实现 视频信号采集流程[8] :首先等待场信号的到 来;然后延时,跳过场消隐,约1.44ms;等待行同步信号;判断采集行数是否满足要求,满足则采集完成,否则延时,跳过行同步信号和消隐信号;对1行视频信号进行连续采集; 延时,跳过若干行视频信号,再跳回到等待行同步信号,直至完成,就能采集到1幅有效而完整的视频图像了。 2 自适应差分边缘检测算法 阈值分割法[9- 10]在结构化道路上是提取指引 4 2交通信息与安全 2012年5期 第30卷 总171期
智能车牌识别系统
智能车牌识别系统 智能车牌识别系统是采用车牌识别技术做为基础,应用与停车场、高速路口、收费通道等场所的车辆管理系统。车牌识别技术(Vehicle License Plate Recognition,VLPR) 是指能够检测到受监控路面的车辆并自动提取车辆车牌信息(含汉字字符、英文字母、阿拉伯数字及号牌颜色)进行处理的技术。车牌识别是现代智能交通系统中的重要组成部分之一,应用十分广泛。它以数字图像处理、模式识别、计算机视觉等技术为基础,对摄像机所拍摄的车辆图像或者视频序列进行分析,得到每一辆汽车唯一的车牌号码,从而完成识别过程。通过一些后续处理手段可以实现停车场收费管理,交通流量控制指标测量,车辆定位,汽车防盗,高速公路超速自动化监管、闯红灯电子警察、公路收费站等等功能。对于维护交通安全和城市治安,防止交通堵塞,实现交通自动化管理有着现实的意义。 随着社会经济的发展、汽车数量急剧增加,对交通控制、安全管理、收费管理的要求也日益提高,运用电子信息技术实现安全、高效的智能交通成为交通管理的主要发展方向。汽车车牌号码是车辆的唯一“身份”标识,智能车牌识别系
统可以在汽车不作任何改动的情况下实现汽车“身份”的自动登记及验证,这项技术已经应用于公路收费、停车管理、交通诱导、交通执法、公路稽查、车辆调度、车辆检测等各种场合。 智能车牌识别系统的几种应用方式: 1、监测报警 对于纳入“黑名单”的车辆,例如:被通缉或挂失的车辆、欠交费车辆、未年检车辆、肇事逃逸及违章车辆等,只需将其车牌号码输入到应用系统中,智能车牌识别设备安装于指定的路口、卡口或由执法人员随时携带按需要放置,系统将识读所有通过车辆的车牌号码并与系统中的“黑名单”比对,一旦发现指定车辆立刻发出报警信息。系统可以全天不间断工作、不会疲劳、错误率极低;可以适应高速行驶的车辆;可以在车辆行使过程中完成任务不影响正常交通;整个监视过程中司机也不会觉察、保密性高。应用这种系统将极大地提高执法效率。 2、超速违章处罚 车牌识别技术结合测速设备可以用于车辆超速违章处罚,一般用于高速公路。具体应用是:在路上设置测速监测点,抓拍超速的车辆并识别车牌号码,将违章车辆的车牌号码及图片发往各出口;在各出口设置处罚点,用智能车牌识别设备识别通过车辆并将号码与已经收到的超速车辆的号码比对,一旦号码相同即启动警示设备通知执法人员处理。与传统的超速监测方式相比,这种应用可以节省警力,降低执法人员的工作强度,而且安全、高效、隐蔽,司机需时刻提醒自己不能超速,极大地减少了因超速引发的事故。 3、车辆出入管理 将智能车牌识别设备安装于出入口,记录车辆的车牌号码、出入时间,并与自动门、栏杆机的控制设备结合,实现车辆的自动管理。应用于停车场可以实现自动计时收费,也可以自动计算可用车位数量并给出提示,实现停车收费自动管理节省人力、提高效率。应用于智能小区可以自动判别驶入车辆是否属于本小区,对非内部车辆实现自动计时收费。在一些单位这种应用还可以同车辆调度系统相结合,自动地、客观地记录本单位车辆的出车情况。
飞思卡尔智能车黑线识别算法及控制策略研究
智能车黑线识别算法及控制策略研究 时间:2009-05-1811:23:07来源:电子技术作者:北京信息科技大学,机电工程学院张淑 谦王国权 0引言 “飞思卡尔”杯全国大学生智能车大赛是由摩托罗拉旗下飞思卡尔公司赞助由高等学校自动化专业教学指导委员会负责主办的全国性的赛事,旨在加强大学生的创新意识、团队合作精神和培养学生的创新能力。此项赛事专业知识涉及控制、模式识别、传感技术、汽车电子、电气、计算机、机械等多个学科,对学生的知识融合和动手能力的培养,对高等学校控制及汽车电子学科学术水平的提高,具有良好的推动作用。 智能车竞赛所使用的车模是一款带有差速器的后轮驱动模型赛车,它由大赛组委会统一提供。自动控制器是以飞思卡尔16位微控制器MC9S12DGl28(S12)为核心控制单元,配合有传感器、电机、舵机、电池以及相应的驱动电路,它能够自主识别路径,控制车高速稳定运行在跑道上。比赛要求自己设计控制系统及自行确定控制策略,在规定的赛道上以比赛完成的时间短者为优胜者。赛道由白色底板和黑色的指引线组成。根据赛道的特点,比赛组委会确定了两种寻线方案:1.光电传感器。2.摄像头。 两种寻线方案的特点如下: (1)光电传感器方案。通过红外发射管发射红外线光照射跑道,跑道表面与中心指引线具有不同的反射强度,利用红外接收管可以检测到这些信息。此方案简单易行程序调试也简单且成本低廉,但是它受到竞赛规则的一些限制(组委会要求传感器数量不超过16个(红外传感器的每对发射与接收单元计为一个传感器,CCD传感器计为1个传感器)),传感器的数量不可能安放的太多,因而道路检测的精度较低,能得到指引线的信息量也较少。若采用此方案容易引起舵机的回摆走蛇形路线。 (2)摄像头方案。根据赛道的特点斯用黑白图像传感器即可满足要求。CCD摄像头有面阵和线阵两种类型,它们在接口电路、输出信号以及检测信息等方面有着较大的区别,面阵摄像头可以获取前方赛道的图像信息,而线阵CCD只能获取赛道一条直线上的图像信息。摄像头方案的所能探测的道路信息量远大于光电传感器方案,而且摄像头也可以探测足够远的距离以方便控制器对前方道路进行预判。虽然此方案对控制器的要求比较高,但组委会提供的MC9S12DGl28(S12)的运算能力以及自身AD口的采样速度完全能够满足摄像头的视频采样和大量图像数据的处理的要求。 本文就是在摄像头方案的前提下,在实时的图像数据获取的基础上对图像信息进行数据处理,从而提取赛道中心的黑色指引线,再以此来作为舵机和驱动电机的控制依据。 1摄像头采样数据的特点 采用的黑白摄像头的主要工作原理为:按一定的分辨率,以隔行扫描的方式采集图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度一一对应的电压值,然后将此电压值通过视频信号端输出,见图1。摄像头连续地扫描图像上的一行,则输出就是一段连续的电压信号,该电压信号的高低起伏反映了该行图像的灰度变化。当扫描完一行,视频信号端就输出一个低于最低视频信号电压的电平(如O.3V),并保持一段时间。这样相当于紧接着每行图像信号之后会有一个电压“凹槽”,此“凹槽”叫做行同步脉
路径识别方案
500W高清路径识别系统 技 术 方 案 北京汉王智通科技有限公司 2011年7月
目录 1系统设计需求3 1.1系统建设目的3 1.2设计原则和标准3 2系统方案5 2.1主要功能6 2.2主要设备技术参数9 3安装方案12 4设备清单13
1系统设计需求 1.1 系统建设目的 随着我国高速公路的不断发展,目前我国已形成了密布的高速公路交通网。为了降低高速公路运营成本,各省高速公路已基本实现了高速公路收费全省联网系统。在省内高速中已取消了主线收费站,实现联网收费,达到了节约运营成本、统一管理的较高水平。车辆进入省内高速公路,在不同业主所有的公路上行驶时已无需一次又一次地进出、交费,而只需在驶入和驶出时进行一次交费。一般由省交通厅或相关部门牵头,结算中心,专门负责高速公路通行费收入的分拆结算,根据车辆所经路段按照一定规则进行分配。 高速公路联网收费一方面减少了通行车辆的交费次数,提高了通行速度,另一方面由于减少了收费站建设和收费人员的聘用、培训,使业主方降低了运营成本,具有可观的经济效益。 然而,对于进行联网收费的高速公路网来说,不可避免的存在有高速公路环网情况,即车辆在网络中从A点驶入到B点驶出,存在多条路径,先行的收费方法是按照最短路径收费,这显然对于业主来说是不合理的。通过路径识别系统可以精确的识别过往车辆的路径,这样可以按照走多少路收多钱的原则收费,减少了业主的损失。该系统建立的目的就是为了更好的解决“路径二义性问题”。 1.2 设计原则和标准 1.2.1设计原则 (1)稳定性和可靠性:系统安装调试后,运行稳定、可靠,在正常使用寿命内,不会出现任何系统和设计缺陷。 (2)经济性:系统配置要具有较高的性能价格比,在满足系统功能要求的前提下,充分了考虑经济性,减轻用户负担,并考虑了系统的运行成本。 (3)先进性:系统设备配置及系统集成具备合理性,并且保证系统具备先进性。
基于MATLAB的汽车牌照自动识别系统设计
1引言 随着我国交通迅速发展,人工管理方式已经逐渐不能满足实际的需要,微电子、通信和计算机技术在交通领域的应用极大地提高了交通管理效率。汽车牌照的自动识别技术已经得到了广泛应用。通过对车辆牌照的正确认识,不仅可以实现交通流量的统计和查询,道路负荷的测定和管理,而且可以对肇事车辆、走私车辆、丢失车辆进行辨识和追查。传统的方法是在设定的路口派专人进行观察和笔录,因此工作强度大、统计繁杂、效率低、准确性差。因而对车辆牌照自动识别技术的研究和应用系统开始具有重要的意义。 汽车牌照自动识别整个处理过程分为预处理、边缘提取、车牌定位、字符分割、字符识别五大模块,其中字符识别过程主要由以下3个部分组成:①正确地分割文字图像区域;②正确的分离单个文字;③正确识别单个字符。 MATLAB是一种强大的数值计算功能的编程工具,在图像处理、信号处理、神经网络中都有着广泛的应用。其数据类型最大的特点是每一种类型都以数组为基础,从数组中派生出来。其所提供的强大的矩阵运算功能。如特征值和特征向量的计算、矩阵求逆灯都可以直接通过MATLAB提供的函数求出。MATLAB还提供了小波分析、图像处理、信号处理、虚拟现实、神经网络等的工具包。其中,图像处理工具包提供了许多可用于图像处理的相关函数。按功能可以分为图像显示;图像文件输入与输出;几何操作;像素值和统计;图像分析与增强;图像铝箔;线性二维滤波器设计;图像变换;领域和块操作;二值图像操作;颜色映射和颜色空间转换;图像类型和类型转换;工具包参数获取和设置等。 基于此,用MATLAB软件编程来实现每一个部分,最后识别出汽车牌照,有很大的优势。在研究的同时对其中出现的问题进行了具体分析,处理。
车牌自动识别系统方案
车牌自动识别停车场管理系统 设 计 方 案 xxx科技有限公司 地址: 电话:手机:
网址: QQ: 智能停车场解决方案 景第一章背 随着我国机动车增长速度的加快,停车场管理系统已经被广泛的应用起来,使车辆管理更加科学化,正规化。经过几年的推广应用,在广泛使用的同时,也发现了一些弊端和漏洞 一、月租卡与车无法准确对应 现有系统,当月租用户刷卡出入车场时,无法自动判定该卡是否对应该车,这样就造成了,用户卡片随意互借,丢失计时卡,车辆数目不准确,用不法手段获取他人月租卡进行高档车辆盗窃的严重安全隐患。 二、临时卡无法自动录入车牌 现有系统,当临时卡用户进入车场时,无法自动在数据库中存储牌照号,这样在查询停车场中某辆临时停放车辆的进出情况时,会变得非常麻烦,无法快速查找。需要依次调取所有进入车辆图片进行人工辨别。同时也无法对离场临停车辆进行车牌和卡片的双重验证,同样也存在安全隐患。 三、车辆进出效率低下。 现在小区规模越来越大,业主车辆越来越多,在经过停车场管理系统刷卡验证时,经常会出现业主找卡,忘记带卡,刷卡时无法靠边的情况,这样就严重影响了通行速度,造成车辆拥堵。在上下班高峰期的时候这种情况尤其严重。 针对以上的系统弊端和漏洞,我公司通过多年的技术研发和验证测试,推出了目前最先进的车牌自动识别系统,作为停车场系统的子系统,通过计算机的图像处理自动识别记录车牌,辨别同一车牌的车辆出入场时是否一致,是目前识别速度最快的车牌识别系统。其软件模块可以嵌入到停车场系统软件中,配合硬件共同实现车牌自动识别功能,使停车场系统更加完善精确。 在智能交通系统中,车牌自动识别系统是一个非常重要的发展方向,车牌自动识别系统正是在这种应用背景下研制出来的能够自动实时地检测车辆经过和识别汽车牌照的智能交通管理系统。 第二章关于车牌识别技术
路径规划论文:路径识别与路径规划方法的研究
路径规划论文:路径识别与路径规划方法的研究 【中文摘要】随着科学技术的发展,各种各样的机器人陆续出现,机器人越来越受到人们的重视,而中国大学生机器人大赛暨Robocup 公开赛更是吸引了很多爱好者。机器人游中国可看成迷你的旅游,这跟目前假期短,如何能够合理安排,多参观几个景点的问题相吻合,故也大大引起大家的兴趣。本文以游中国机器人为研究对象,研究路径规划和路径识别的方法。基本思想是:首先根据比赛要求,建立大赛的基本界面平台,对图像进行数据存储,为遍历做准备。然后根据经典的遍历方法,通过改进来实现景点的遍历,比较得到一条较理想的旅游 路线。另一方面机器人在前进时要根据看到的路况来控制速度,因此对道路情况进行提取,并通过一系列方法去由环境等引起除噪声及冗余信息,得到较好的道路目标。然后对前方路况的几种情况进行提取分析,利用角点检测的方法来确定分支数,使机器人能够更好的选择 路线。具体实现过程如下:1.地图的存储。首先建立大赛涉及的基本界面平台,分析比较了几种常用的图存储方法的优劣。2.遍历算法。首先介绍了人工智能中常用的几种遍历算法,并对各个算法的复杂性和适用情况进行分析比较。根据该项目中的需要加以改进,得到不同的遍历路线。再... 【英文摘要】With the development of science and technology, a variety of robots showed up, that’s the reason that more and more people pay attention to the robot. However, Robot
人工智能车牌识别
车牌自动识别 近年来,随着物联网、车联网的迅猛发展,以及中国汽车数量的不断增加,这对智能交通系统提出了新的要求。作为智能交通系统一部分的集成信号处理、计算机视觉、模式识别等技术的车牌识别系统因而也有了新的应用和挑战。除传统的用于高速公路超速违章管理、停车场管理、车辆流量管理以及车辆电子收费系统外,车牌识别系统还可以用于移动机器人对停车场车辆的监管以及交通管理部门对违章车辆车牌的自动登记等。 一、车牌自动识别系统的技术说明 车牌自动识别系统采用车牌识别技术来实现技术效果的。车牌识别技术(Vehicle License Plate Recognition,VLPR) 是指能够检测到受监控路面的车辆并自动提取车辆牌照信息(含汉字字符、英文字母、阿拉伯数字及号牌颜色)进行处理的技术。车牌识别是现代智能交通系统中的重要组成部分之一,应用十分广泛。它以数字图像处理、模式识别、计算机视觉等技术为基础,对摄像机所拍摄的车辆图像或者视频序列进行分析,得到每一辆汽车唯一的车牌号码,从而完成识别过程。通过一些后续处理手段可以实现停车场收费管理,交通流量控制指标测量,车辆定位,汽车防盗,高速公路超速自动化监管、闯红灯电子警察、公路收费站等等功能。对于维护交通安全和城市治安,防止交通堵塞,实现交通自动化管理有着现实的意义。 车牌识别技术结合电子不停车收费系统(ETC)识别车辆,过往车辆通过道口时无须停车,即能够实现车辆身份自动识别、自动收费。在车场管理中,为提高出入口车辆通行效率,车牌识别针对无需收停车费的车辆(如月卡车、内部免费通行车辆),建设无人值守的快速通道,免取卡、不停车的出入体验,正改变出入停车场的管理模式。 汽车牌照号码是车辆的唯一“身份”标识,牌照自动识别技术可以在汽车不作任何改动的情况下实现汽车“身份”的自动登记及验证,这项技术已经应用于公路收费、停车管理、称重系统、交通诱导、交通执法、公路稽查、车辆调度、车辆检测等各种场合。 以下列举了几种应用方式: ——监测报警 对于纳入“黑名单”的车辆,例如:被通缉或挂失的车辆、欠交费车辆、未年检车辆、肇事逃逸及违章车辆等,只需将其车牌号码输入到应用系统中,车牌识别设备安装于指定的路口、卡口或由执法人员随时携带按需要放置,系统将识读所有通过车辆的牌照号码并与系统中的“黑名单”比对,一旦发现指定车辆立刻发出报警信息。系统可以全天不间断工作、不会疲劳、错误率极低;可以适应高速行驶的车辆;可以在车辆行使过程中完成任务不影响正常交通;整个监视过程中司机也不会觉察、保密性高。应用这种系统将极大地提高执法效率。 ——超速违章处罚 车牌识别技术结合测速设备可以用于车辆超速违章处罚,一般用于高速公路。具体应用是:在路上设置测速监测点,抓拍超速的车辆并识别车牌号码,将违章车辆的牌照号码及图片发往各出口;在各出口设置处罚点,用车牌识别设备识别通过车辆并将号码与已经收到的超速车辆的号码比对,一旦号码相同即启动警示设备通知执法人员处理。与传统的超速监测方式相比,这种应用可以节省警力,降低执法人员的工作强度,而且安全、高效、隐蔽,司机需时刻提醒自己不能超速,极大地减少了因超速引发的事故。