实验DSP直流电机控制实验
单片机直流电机控制实训报告
单片机直流电机控制实训报告
基于AT89C51单片机的直流电动机控制器设计 实训报告 专业:弹药工程与爆炸技术 班级:弹药二班 学生姓名:杨宁 指导教师:佟慧艳 能源与水利学院
1 实训目的 通过单片机实训使学生能够掌握利用Keil软件编写单片机程序,学会设计完整的单片机应用系统;依托Protues仿真平台进行单片机电子应用系统设计与仿真,使学生掌握单片机应用系统的设计技能;培养学生运用所学知识分析和解决实际问题的能力以及实际动手能力和查阅资料能力。
2 实训任务及要求 2.1 任务描述 一单片机为控制核心设计一款直流电机电机控制系统,可以实现直流电机的加速、正转、反转等控制方式。 2.2 任务要求 1)用AT89C51单片机实现上述任务要求; 2)在Keil IDE中完成应用程序设计与编译; 3)在Proteus环境中完成电路设计、调试与仿真。
3 系统硬件组成与工作原理 3.1单片机的控制器与最小系统 单片机的最小系统是指有单片机和一些基本的外围电路所组成的一个可以使单片机工作的系统,一般来说,它包括单片机、晶振电路和复位电路(如图一)。 图1 最小系统设计截图 (一)控制器部分分析 AT89C51(如图2)是一种带4K字节FLASH存 储器(FPEROM—Flash Programmable and Erasable Read Only Memory)的低电压、高性能CMOS 8位微 处理器,俗称单片机。 AT89C51提供以下标准功能:4k 字节Flash 闪 速存储器,128字节内部RAM,32 个I/O 口线,两 个16位定时/计数器,一个5向量两级中断结构, 一个全双工串行通信口,片内振荡器及时钟电路。 同时,AT89C51可降至0Hz的静态逻辑操作,并支 持两种软件可选的节电工作模式。空闲方式停止CPU 的工作,但允许RAM,定时/计数器,串行通信口及 中断系统继续工作。掉电方式保存RAM中的内容,
基于单片机的直流电机控制设计性实验报告
设计题目:直流电机控制电路设计 一设计目得 1掌握单片机用PWM实现直流电机调整得基本方法,掌握直流电机得驱动原理。 2学习模拟控制直流电机正转、反转、加速、减速得实现方法. 二设计要求 用已学得知识配合51单片机设计一个可以正转、反转或变速运动得直流电机控制电路,并用示波器观察其模拟变化状况。 三设计思路及原理 利用单片机对PWM信号得软件实现方法.MCS一51系列典型产品8051具有两个定时计数器。因为PWM信号软件实现得核心就是单片机内部得定时器,所以通过控制定时计数器初值,从而可以实现从8051得任意输出口输出不同占空比得脉冲波形。从而实现对直流电动机得转速控制。 .AT89C51得P1、0—P1、2控制直流电机得快、慢、转向,低电平有效.P3、0为PWM波输出,P3、1为转向控制输出,P3、2为蜂鸣器。PWM控制DC电机转速,晶振为12M,利用定时器控制产生占空比可变得PWM波,按K1键,PWM值增加,则占空比增加,电机转快,按K2键,PWM值减少,则占空比减小,电机转慢,当PWM值增加到最大值255或者最小值1时,蜂鸣器将报警 四实验器材 DVCC试验箱导线若电源等器件
PROTUES仿真软件KRIL软件 五实验流程与程序 #include 〈 reg51、h > sbitK1 =P1^0;增加键 sbit K2 =P1^1 ; 减少键 sbit K3 =P1^2;转向选择键 sbit PWMUOT =P3^0; PWM波输出?? sbitturn_around =P3^1 ;?转向控制输出 sbit BEEP =P3^2 ;蜂鸣器 unsigned int PWM; void Beep(void); void delay(unsigned int n); void main(void) { TMOD=0x11;//设置T0、T1为方式1,(16位定时器) TH0=0 ; 65536us延时常数{t=(65536—TH)/fose/12} ?TL0=0; TH1=PWM; //脉宽调节,高8位 ? TL1=0; EA=1;? //开总中断 ET0=1; //开T0中断? ET1=1;??//开T1中断
直流电机PLC控制实验
实验四直流电机PLC控制实验一、实验目的 1.掌握PLC的基本工作原理 2.掌握PID控制原理 3.掌握PLC控制直流电机方法 4.掌握直流电机的调速方法 二、实验器材 1.计算机控制技术实验装置一台 2.CP1H编程电缆一条 3.PC机一台 三、实验内容 根据输入,实现PLC对直流电机的调速PID控制。1、输入功能 (1)功能操作,按钮1 1.1、按钮1按下一次,显示SV(设定点值)。 1.2、按钮1按下两次,显示速度设定值。 1.3、按钮1按下三次,设定P值,显示。 1.4、按钮1按下四次,显示P值。 1.5、按钮1按下五次,设定I值,显示。 1.6、按钮1按下六次,显示I值。 1.7、按钮1按下七次,设定D值,显示。 1.8、按钮1按下八次,显示D值。
1.9、按钮1按下九次,显示At(PID 自调整增益) 1.10、按钮1按下十次,自整定显示 1.11、按钮1按下十一次,复位 (2)增加按钮2,数值增加 (3)减小按钮3,数值减小 (4)确定按钮4,操作确定 2、PWM脉冲输出,接输出101.00。 3、直流电机测速,光耦,接高速脉冲输入。 4、LED显示,根据按钮输入,显示设定值/测量值/加减量。 四、实验原理 1.直流无刷电机PWM调速原理 PWM的意思是脉宽调节,也就是调节方波高电平和低电平的时间比,一个20%占空比波形,会有20%的高电平时间和80%的低电平时间,而一个60%占空比的波形则具有60%的高电平时间和40%的低电平时间,占空比越大,高电平时间越长,则输出的脉冲幅度越高,即电压越高.如果占空比为0%,那么高电平时间为0,则没有电压输出.如果占空比为100%,那么输出全部电压。 PWM的占空比决定输出到直流电机的平均电压,所以通过调节占空比,可以实现调节输出电压的目的,而且输出电压可以无级连续调节。在使用PWM控制的直流无刷电动机中,PWM控制有两种方式:(1)使用PWM信号,控制三极管的导通时间,导通的时间越长,那么
直流电机转速控制的matlab实验
2012/2013学年第一学期《精密测控与系统》期末大型作业 日期:2012 年11 月 题目与要求: 直流电机转速控制问题,直流电动机物理模型如下图所示。
电动机产生的转矩与电枢电流成正比,即:t t T K i =,电枢绕组的反电动势与转速成正比,即:e d e K dt θ=,牛顿第二定律:2 2d T J dt θ=,其中J 为电机轴上的转动惯 量。 已知:转动惯量:2 2 0.01kg.m /s J =,机械系统摩擦系数:0.1N.m.s b =,电动机力矩 系数:0.01N.m/A e t K K ==,电阻:1R =Ω ,电感:0.5H L =。假设电机转动系统刚 性,输入量为直流电压V ,输出量为电机转速θ 。 问题1:建立该系统的时域数学模型。 问题2:给出该系统的传递函数,用Matlab 计算该系统的阶跃响应曲线,给出阶 跃响应的特征参数。 问题3:建立该系统的状态空间表达式,用Matlab 计算该系统的阶跃响应曲线。 问题4:加入速度反馈及PID 控制器环节,使系统性能达到: (a ) 建立时间<2s; (b ) 超调量<5%; (c ) 稳态误差<1%. 问题5:采用下图所示的模糊控制系统 系统中的模糊控制器是一个双输入单输出型的控制器,输入变量为转速的误差e 和转速误差的变化率Δe ,输出为直流电压的增量ΔV 。请选用合适的隶属度函数,建立该系统的模糊控制规则库,对电机的转速进行控制使期望转速为1000r/min ,建立时间<2s;超调量<5%;稳态误差e<±1.0%。 问题6:通过这个大型作业,谈谈你对本课程的学习心得和体会,以及对本课程授课方式的建议和改进。 一、建立该系统的时域数学模型
直流电机控制实验指导书
实验一直流电机速度控制与PID参数校正 一、实验目的 1、掌握调整直流伺服驱动器PID参数的方法 2、理解不同转动惯量对系统性能指标的影响 二、实验要求 通过simulink对电机进行仿真,确定合适的PID参数。随后对直流电机进行电流环、速度环、位置环的PID控制,通过改变系统转动惯量,根据期望性能指标整定直流伺服驱动器的电流环、速度环、位置环PID参数,确保理论曲线与实际曲线尽量拟合。进一步地分析直流电机控制精度的影响因素。 三、实验设备 1、直流伺服系统控制平台,GSMT2012; 2、PC、Easy Motion Studio软件; 四、实验原理 转动惯量是刚体转动时惯量的度量,其量值取决于物体的形状、质量分布及转轴的位置。转动惯量在旋转动力学中的质量,所以当系统转动惯量增大后,相同的控制器参数情况下,系统的性能指标一定下降。为保持原有的性能指标,必须重新整定PID参数。 五、实验步骤 1、Easy Motion Studio软件对直流电机进行测试 Easy Motion Studio是针对直流电机控制器进行参数调整的专业软件,它能够实时在线的对电机的参数进行调整,并通过编码器对电机参数进行测试,并通过软件界面观测调试结果,最终成功选择合适的PID参数。首先,对Easy Motion Studio软件进行了解。 点击图标,进入软件界面,选择“Open”,并点击“OK”。如下图所示。
进入软件界面后,在“View”菜单下,选择“Project”即可得到以下界面。 选择在左列的下拉菜单选择“Setup”,并选择“Edit”,在这里对直流电机的参数可以方便地进行调整,并可对调整后的结果进行实时观测。需要注意的是,在这里电机应选择T54。并 选择“Save to User Database”。
基于单片机的直流电机控制设计性实验报告
设计题目:直流电机控制电路设计 一设计目的 1 掌握单片机用PWM实现直流电机调整的基本方法,掌握直流电机的驱动原理。 2 学习模拟控制直流电机正转、反转、加速、减速的实现方法。 二设计要求 用已学的知识配合51单片机设计一个可以正转、反转或变速运动的直流电机控制电路,并用示波器观察其模拟变化状况。 三设计思路及原理 利用单片机对PWM信号的软件实现方法。MCS一51系列典型产品8051具有两个定时计数器。因为PWM信号软件实现的核心是单片机内部的定时器,所以通过控制定时计数器初值,从而可以实现从8051的任意输出口输出不同占空比的脉冲波形。从而实现对直流电动机的转速控制。 。AT89C51的P1.0—P1.2控制直流电机的快、慢、转向,低电平有效。P3.0为PWM波输出,P3.1为转向控制输出,P3.2为蜂鸣器。PWM控制DC电机转速,晶振为12M,利用定时器控制产生占空比可变的PWM波,按K1键,PWM值增加,则占空比增加,电机转快,按K2键,PWM值减少,则占空比减小,电机转慢,当PWM值增加到最大值255或者最小值1时,蜂鸣器将报警 四实验器材
DVCC试验箱导线若电源等器件 PROTUES仿真软件KRIL软件 五实验流程与程序 #include < reg51.h > sbit K1 =P1^0 ; 增加键 sbit K2 =P1^1 ; 减少键 sbit K3 =P1^2 ; 转向选择键 sbit PWMUOT =P3^0 ; PWM波输出 sbit turn_around =P3^1 ; 转向控制输出 sbit BEEP =P3^2 ; 蜂鸣器 unsigned int PWM; void Beep(void); void delay(unsigned int n); void main(void) { TMOD=0x11; //设置T0、T1为方式1,(16位定时器) TH0=0 ; 65536us延时常数{t=(65536-TH)/fose/12} TL0=0; TH1=PWM ; //脉宽调节,高8位 TL1=0; EA=1; //开总中断 ET0=1; //开T0中断
智能小车的直流电机控制
智能小车的直流电机控制 作者:本站来源:转载发布时间:2009-3-6 20:21:41 [收藏] [评论] 智能小车的直流电机控制 【实验目的】 了解以单片机为核心的直流电机控制系统 掌握此系统中直流电机驱动与调速原理 熟悉ICCAVR 软件编译环境,会编写控制程序 【实验器材】 智能小车一部,下载线一根 【实验原理】 直流电机驱动控制系统示意图: 在本实验中所分析的是以单片机ATMEGA8515L 为核心的直流电机控制系统。 ATMEGA8515L 芯片的引脚图如下: 功放驱动电路采用基于双极性H-桥型脉宽调整方式PWM 的集成电路L293D。L293D是单块集成电路,高电压,高电流,四通道驱动,设计用来接受DTL 或者TTL 逻辑电平,驱动感性负载(比如继电器,直流和步近马达),和开关电源晶体管。其引脚图如下:
ATMEGA8515L 利用I/O 口(PD5,PE2,PD4,PD6)向驱动电路输出控制电平,这些I/O 口作为单片机控制指令的输出,连接到驱动电路中L293D 的相应管脚上。 其真值表如下: 对于电机的转速调整,我们是采用脉宽调制(PWM)办法,控制电机的时候,电源并非连续地向电机供电,而是在一个特定的频率下以方波脉冲的形式提供电能。不同占空比的方波信号能对电机起到调速作用,这是因为电机实际上是一个大电感,它有阻碍输入电流和电 压突变的能力,因此脉冲输入信号被平均分配到作用时间上,这样,改变在始能端PE2 和
PD5 上输入方波的占空比就能改变加在电机两端的电压大小,从而改变了转速。 此实验中用微处理机来实现脉宽调制,通常的方法有两种: (1)用软件方式来实现,即通过执行软件延时循环程序交替改变端口某个二进制位输出逻辑状态来产生脉宽调制信号,设置不同的延时时间得到不同的占空比。 (2)硬件电路自动产生PWM 信号,不占用CPU 处理的时间。 这就要用到ATMEGA8515L 的在PWM 模式下的计数器1,具体内容可参考相关书籍。 【实验步骤】 (1)连接好电路,把数据线,下载线连接好,打开电源 (2)进入ICCAVR 编译环境,调试程序直至没有错误,编译环境简介请参见附录一 (3)下载,烧录进单片机,观察实验结果 (4)反复修改调试程序,逐渐增强其功能 (5)写好实验报告,实验心得体会 【程序示例】 1、小车前进一段——>左转一圈——>右转一圈——>前进一段——>后退一段——>停下 //ICC-AVR application builder : 2005-5-19 19:12:13 // Target : M8515 // Crystal: 4.0000Mhz #include
实验三 直流电机控制实验
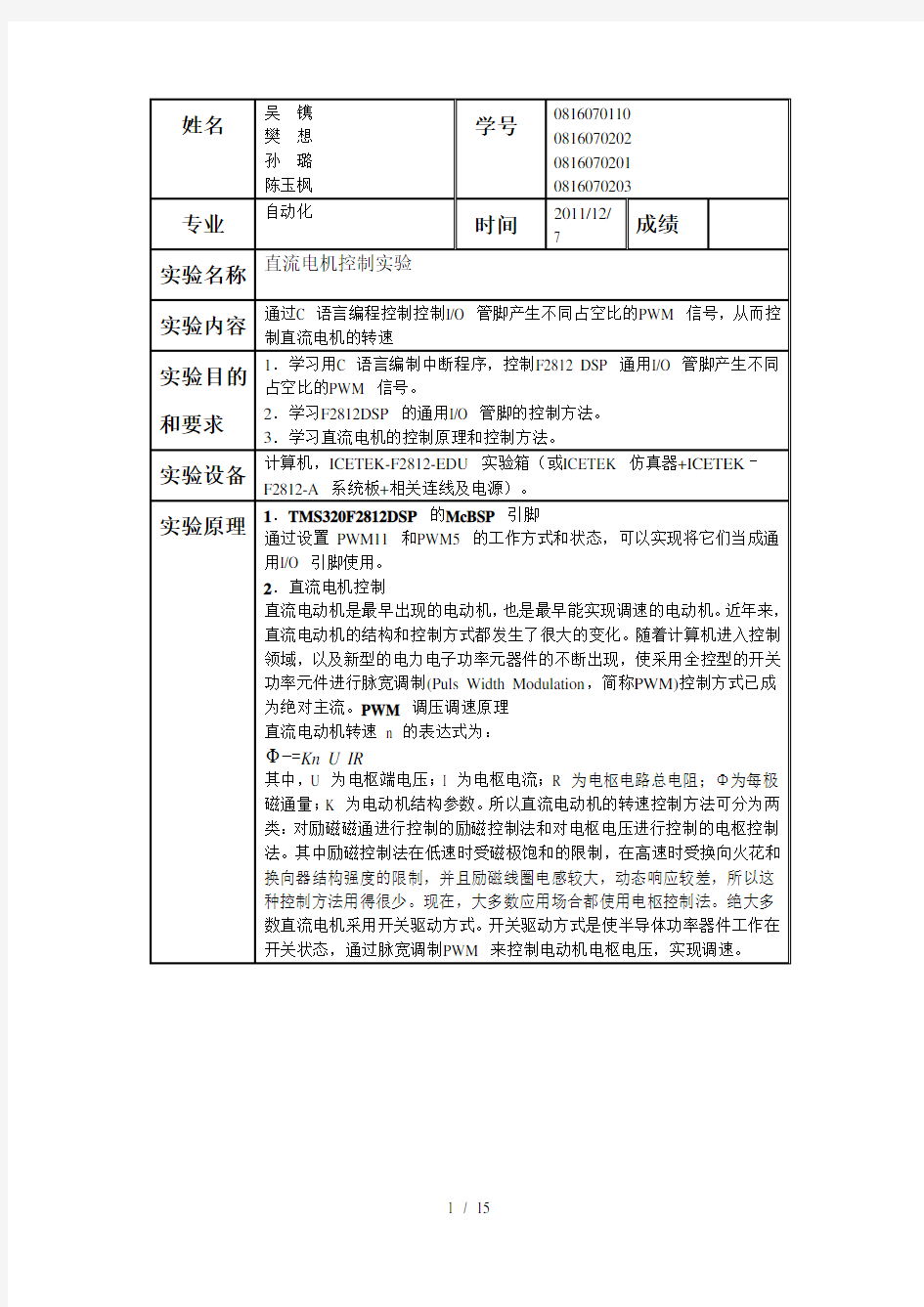
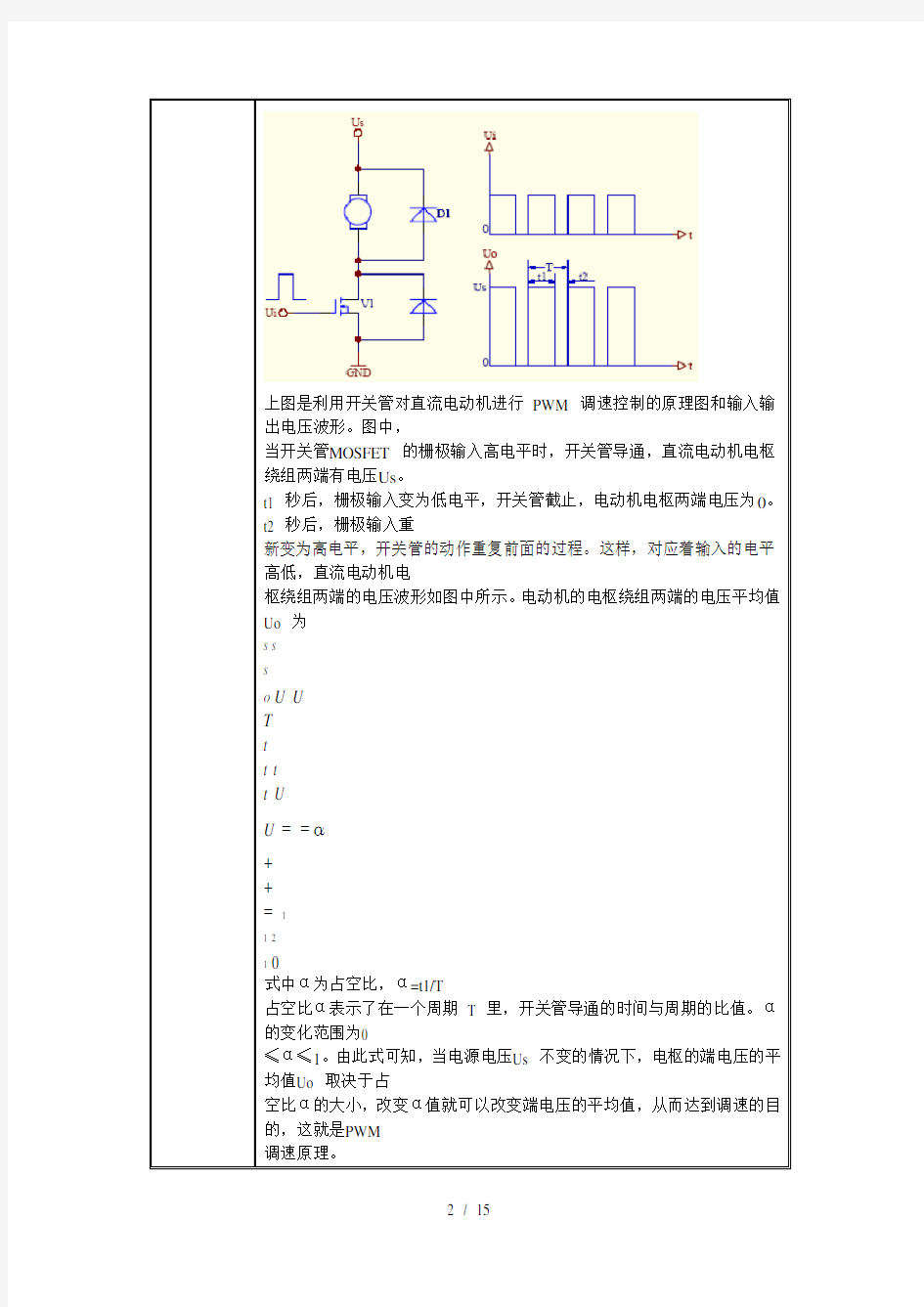
实验三 直流电机控制实验(v61版) 一.实验设备 计算机,ICETEK-VC5509A-S60(6.1)实验箱(或ICETEK 仿真器+ICETEK –VC5509-A 系统板+相关连线及电源)。 二.实验原理 1.TMS320VC5509DSP 的McBSP 引脚: 通过设置McBSP 的工作方式和状态,可以实现将它们当成通用I/O 引脚使用。 2.直流电机控制: 直流电动机是最早出现的电动机,也是最早能实现调速的电动机。近年来,直流电动机的结构和控制方式都发生了很大的变化。随着计算机进入控制领域,以及新型的电力电子功率元器件的不断出现,使采用全控型的开关功率元件进行脉宽调制(Puls Width Modulation ,简称PWM)控制方式已成为绝对主流。 PWM 调压调速原理 直流电动机转速n 的表达式为: Φ-=K IR U n 其中,U 为电枢端电压;I 为电枢电流;R 为电枢电路总电阻;Φ为每极磁通量;K 为电 动机结构参数。 所以直流电动机的转速控制方法可分为两类:对励磁磁通进行控制的励磁控制法和对电枢电压进行控制的电枢控制法。其中励磁控制法在低速时受磁极饱和的限制,在高速时受换向火花和换向器结构强度的限制,并且励磁线圈电感较大,动态响应较差,所以这种控制方法用得很少。现在,大多数应用场合都使用电枢控制法。绝大多数直流电机采用开关驱动方式。开关驱动方式是使半导体功率器件工作在开关状态,通过脉宽调制PWM 来控制电动机电枢电压,实现调速。
上图是利用开关管对直流电动机进行PWM 调速控制的原理图和输入输出电压波形。图中,当开关管MOSFET 的栅极输入高电平时,开关管导通,直流电动机电枢绕组两端有电压Us 。t1秒后,栅极输入变为低电平,开关管截止,电动机电枢两端电压为0。t2秒后,栅极输入重新变为高电平,开关管的动作重复前面的过程。这样,对应着输入的电平高低,直流电动机电枢绕组两端的电压波形如图中所示。电动机的电枢绕组两端的电压平均值Uo 为: S S S O U U T t t t U t U α==++=12110 式中α为占空比,α=t1/T 占空比α表示了在一个周期T 里,开关管导通的时间与周期的比值。α的变化范围为0≤α≤1。由此式可知,当电源电压Us 不变的情况下,电枢的端电压的平均值Uo 取决于占空比α的大小,改变α值就可以改变端电压的平均值,从而达到调速的目的,这就是PWM 调速原理。 PWM 调速方法 在PWM 调速时,占空比α是一个重要参数。以下3种方法都可以改变占空比的值: ⑴定宽调频法:这种方法是保持t1不变,只改变t2,这样使周期T(或频率)也随之改变。 ⑵调宽调频法:这种方法是保持t2不变,只改变t1,这样使周期T(或频率)也随之改变。 ⑶定频调宽法:这种方法是使周期T(或频率)保持不变,而改变t1和t2。 前两种方法由于在调速时改变了控制脉冲的周期(或频率),当控制脉冲的频率与系统的固 有频率接近时,将会引起震荡,因此这两种方法用得很少。目前,在直流电动机的控制中,主要使用定频调宽法。 3.ICETEK-CTR 直流电机模块: 原理图 ICETEK-CTR 即显示/控制模块上直流电机部分的原理图见下图。
直流电机转速控制实验报告
自动控制原理实验 实验报告 直流电机转速控制设计 一、实验目的 1、了解直流电机转速测量与控制的基本原理。 2、掌握LabVIEW图形化编程方法,编写直流电机转速控制系统程序。 3、熟悉PID参数对系统性能的影响,通过PID参数调整掌握PID控制原理。 二、实验设备与器件 计算机、NI ELVIS II多功能虚拟仪器综合实验平台、LabVIEW软件、万用表、12V直流电
机、光电管,电阻、导线。 三、实验原理 直流电机转速测量与控制系统的基本原理是:通过调节直流电机的输入电压大小调节电机转速;利用光电管将电机转速转换为一定周期的光电脉冲、采样脉冲信号,获取脉冲周期。将脉冲的周期变换为脉冲频率,再将脉冲频率换算为电机转速;比较电机的测量转速与设定转速,将转速偏差信号送入PID控制器,由PID控制器输出控制电压,通可变电源输出作为直流电机的输入电压,实现电机转速的控制。 四、实验过程 (1)在实验板上搭建出电机转速光电检测电路 将光电管、直流电机安装在实验板上的合适位置,使得直流电机的圆片恰好在光电管之中,用导线将光电管与相应阻值的电阻相连,并将电路与相应的接口相连,连接好的电路图如下。 (2)编写程序,实现PID控制 SP为期望转速输出,是用户通过转盘输入期望的转速;PV为实际测量得到的电机转速,通过光电开关测量马达转速可以得到;MV为PID输出控制电压,将其接到“模拟DBL”模块,实现控制电源产生所需的直流电机控制电压。通过不断地检测马达转速与期望值对比产生偏差,通过PID控制器产生控制信号,实现对直流电机转速的控制。 编写的程序如下图所示
五、调试过程及结果 PID参数调整如下时,系统出现了振荡现象,导致了系统的不稳定。 于是将参数kc调小,调整后的参数如下:
PID直流电机转速控制实验报告
课程设计 课程名称计算机控制技术 题目名称 PID直流电机转速控制学生学院 专业班级 学号 学生姓名 指导教师 2013 年06 月17日
目录 一、系统总体设计 (3) 二、硬件设计 (10) 三、软件设计 (16) 四、结果分析 (21) 五、实验总结及体会 (21) 六、附录 (22)
一、系统总体设计 1.1直流电机转速开环控制与闭环控制的选取 对直流电机转速的控制有一般有两种方式,一种是开环控制,一种是闭环控制。开环控制的优点是简单、稳定、可靠。 若组成系统的元件特性和参数值比较稳定,且外界干扰较小,开环控制能够保持一定的精度。缺点是精度通常较低,无自动纠偏能力;闭环控制的优点是控制的精度可以达到很高,而且对外界的干扰和系统的参数变化有很好的抑制作用,且可以通过输出反馈控制系统的控制过程。缺点是存在稳定性,振荡,超调等一系列问题,对系统的性能分析和设计远比开环控制麻烦。 经过利弊的取舍,本次试验选择的是闭环控制,因为准备应用PID算法控制电机的转速,故而需要有实际转速进行反馈与给定的转速形成对比,进而通过算法输出PWM波形来控制直流电机。 既然选择了直流电机转速闭环控制,可根据反馈机制大概做出其控制模型。
1.2 直流电机调速方式的选取 直流无刷电机由电动机、转子位置传感器和电子开关线路三部分组成。直流电源通过开关线路向电动机定子绕组供电,电动机转子位置由位置传感器检测并提供信号去触发开关线路中的功率开关元件使之导通或截止,从而控制电动机的转动。在应用实例中,磁极旋转,电枢静止,电枢绕组里的电流换向借助于位置传感器和电子开关电路来实现。电机的电枢绕组作成三相,转子由永磁材料制成,与转子轴相连的位置传感器采用霍尔传感器。3600范围内,两两相差1200安装,共安装三个。为了提高电机的特性,电机采用二相导通星形三相六状态的工作方式。开关电路采用三相桥式接线方式。 基于直流电机的特性,本次试验使用的是PWM 脉宽调制方法。脉宽调制 (PWM)是利用数字输出对模拟电路进行控制的一种有效技术,尤其是在对电机的转速控制方面,可大大节省能量。PWM 具有很强的抗噪性,且有节约空间、比较经济等特点。模拟控制电路有以下缺陷:模拟电路容易随时间漂移,会产生一些不必要的热损耗,以及对噪声敏感等。而在用了PWM 技术后,避免了以上的缺陷,实现了用数字方式来控制模拟信号,可以大幅度降低成本和功耗。PWM 对调速系统来说,系统 PID 算法 输出直流电机 — R(t) + e(t) c(t) 测速装置
步进电动机直流电机控制实验
铜仁学院 实验报告 课程名称:单片机原理与接口技术 专业:信息工程 班级:2011级 学生姓名: 王浩刘军
铜仁学院实验报告 课程名称:单片机原理与接口技术实验时间:3月19日 成绩评定:实验地点:2602教室 【实验名称】 步进电动机、直流电机控制实验 【实验目的】 了解单片机控制步进电机、直流电机的基本原理。 【实验内容及原理】 1、步进电机驱动原理 步进电机驱动原理是通过对每相线圈中的加电顺序切换来使电机作步进式旋转。驱动电流 由脉冲信号来控制,调节脉冲信号的频率便可改变步进电机的转速。本实验所用的步进电 机型号为:20BY-0(四相四拍)永磁步进电动机,电机线圈由四相组成,即:f1(A相);f2(B 相);f3(C相);f4(D相), 驱动方式为二相激励方式,各线圈通电顺序与步进方向的关系如下表。 若首先向A、B相加电,接着B、C相加电;C、D相加电、D、A相加电,之后又返回到A、B相,电机按顺时针方向旋转。反之,电机按逆时针方向旋转。每一次加电,转动的角度(步进角)为18度。通过改变加电的频率(步进电机脉冲频率),可改变步进电机的速度。通过改变加电的顺序,可改变转动的方向。 2、直流电机的转动原理
直流电机的转动方向是由加在电机上的电压正负极性决定的。电压为正,则顺时针方向转,电压为负,则逆时针方向转,转速的改变是通过改变所加脉冲的占空比越大,转速 越快。示意图如下:本实验所用的直流电机,只能单方向转动。 实验电路图所示 ULN2003A为达林顿晶体管阵列,内含7个达林顿晶体管,xB(x=1~7)为达林顿晶体管的输入(基极)端,xC为达林顿晶体管的输出(集电极)端。步进电机、直流电机在实验台上已经接好。实验内容: 1、按实验电路图连接步进电机,编程输出脉冲序列,使步进电机按顺时针、逆时针转动。 2、按实验电路图连接直流电机,编程使直流电机转动。 【参考流程图】 1、步进电机按顺时针转动
单片机直流电机控制实训报告
基于AT89C51单片机的直流电动机控制器设计 实训报告 专业:弹药工程与爆炸技术 班级:弹药二班 学生姓名:杨宁 指导教师:佟慧艳 能源与水利学院
1 实训目的 通过单片机实训使学生能够掌握利用Keil软件编写单片机程序,学会设计完整的单片机应用系统;依托Protues仿真平台进行单片机电子应用系统设计与仿真,使学生掌握单片机应用系统的设计技能;培养学生运用所学知识分析和解决实际问题的能力以及实际动手能力和查阅资料能力。
2 实训任务及要求 2.1 任务描述 一单片机为控制核心设计一款直流电机电机控制系统,可以实现直流电机的加速、正转、反转等控制方式。 2.2 任务要求 1)用AT89C51单片机实现上述任务要求; 2)在Keil IDE中完成应用程序设计与编译; 3)在Proteus环境中完成电路设计、调试与仿真。
3 系统硬件组成与工作原理 3.1单片机的控制器与最小系统 单片机的最小系统是指有单片机和一些基本的外围电路所组成的一个可以使单片机工作的系统,一般来说,它包括单片机、晶振电路和复位电路(如图一)。 图 1 最小系统设计截图 (一)控制器部分分析 AT89C51(如图2)是一种带4K字节FLASH存储 器(FPEROM—Flash Programmable and Erasable Read Only Memory)的低电压、高性能CMOS 8位微 处理器,俗称单片机。 AT89C51提供以下标准功能:4k 字节Flash 闪 速存储器,128字节内部RAM,32 个I/O 口线,两 个16位定时/计数器,一个5向量两级中断结构, 一个全双工串行通信口,片内振荡器及时钟电路。 同时,AT89C51可降至0Hz的静态逻辑操作,并支持 两种软件可选的节电工作模式。空闲方式停止CPU 的工作,但允许RAM,定时/计数器,串行通信口及 中断系统继续工作。掉电方式保存RAM中的内容, 但振荡器停止工作并禁止其它所有部件工作直到下 一个硬件复位。其优点是支持较为丰富而且简 图 2 AT89C51单的指令集,编程器通用且兼容性好,
直流伺服电机实验报告
实验六直流伺服电机实验 一、实验设备及仪器 被测电机铭牌参数: P N =185W ,U N =220V ,I N =1.1A ,μN =1600rpm 使用设备规格(编号): 1.MEL 系列电机系统教学实验台主控制屏(MEL-I 、MEL-IIA 、B ); 2.电机导轨及测功机、转速转矩测量(MEL-13); 3.直流并励电动机M03(作直流伺服电机); 4.220V 直流可调稳压电源(位于实验台主控制屏的下部); 5.三相可调电阻900Ω(MEL-03); 6.三相可调电阻90Ω(MEL-04); 7.直流电压、毫安、安培表(MEL-06); 二、实验目的 1.通过实验测出直流伺服电动机的参数r a 、e κ、T κ。
2.掌握直流伺服电动机的机械特性和调节特性的测量方法。 三、实验项目 1.用伏安法测出直流伺服电动机的电枢绕组电阻r a 。 2.保持U f=U fN=220V,分别测取U a =220V及U a=110V的机械特性n=f(T)。3.保持U f=U fN=220V,分别测取T2=0.8N.m及T2=0的调节特性n=f(Ua)。4.测直流伺服电动机的机电时间常数。 四、实验说明及操作步骤 1.用伏安法测电枢的直流电阻Ra
取三次测量的平均值作为实际冷态电阻值Ra=3 13 2a a a R R R ++。 表中Ra=(R a1+R a2+R a3)/3; R aref =Ra*a ref θ++235235 (3)计算基准工作温度时的电枢电阻 由实验测得电枢绕组电阻值,此值为实际冷态电阻值,冷态温度为室温。按下式换算到基准工作温度时的电枢绕组电阻值: R aref =Ra a ref θθ++235235 式中R aref ——换算到基准工作温度时电枢绕组电阻。(Ω) R a ——电枢绕组的实际冷态电阻。(Ω) θref ——基准工作温度,对于E 级绝缘为75℃。 θa ——实际冷态时电枢绕组的温度。(℃) 2.测直流伺服电动机的机械特性
单片机 直流电机控制实验
直流电机控制实验 摘要:直流电动机在交通、机械、纺织、航空等领域中已经得到广泛的应用。而以往直流电动机的控制只是简单的控制,很难进行调速,不能实现智能化。如今,直流电动机的调速控制已经离不开单片机的控制,单片机应用技术的飞速发展促进了自动控制技术的发展,使人类社会步入了自动化时代,单片机应用技术与其他学科领域交叉融合,促进了学科发展和专业更新,引发了新兴交叉学科与技术的不断涌现。现代科学技术的飞速发展,改变了世界,也改变了人类的生活。由于单片机的体积小、重量轻、功能强、抗干扰能力强、控制灵活、应用方便、价格低廉等特点,计算机性能的不断提高,单片机的应用也更加广泛特别是在各种领域的控制、自动化等方面。 关键词:STC89C52 PWM 电机控制 DC motor control experiment Summary:DC motors in transportation, machinery, textiles, aviation and other fields has been widely used. The conventional DC motor control simply control, difficult to control, not intelligent. Today, the DC motor speed control has been inseparable from the control of the microcontroller, the rapid development of microcomputer application technology to promote the development of automatic control technology, the human society entered the era of automation, microcomputer application technology and other disciplines intersect, promotion of the academic development and professional update, sparked new interdisciplinary and emerging technologies. The rapid development of modern science and technology, has changed the world, but also change the way people live. As the device small size, light weight, powerful, strong anti-interference ability, flexible control, easy to use, low cost characteristics, computer performance continues to improve, SCM applications are more widely especially control in various areas of automation and so on. Keywords: STC89C52 PWM motor control
直流电动机启动、调速控制电路实验
实验题目类型:设计型 《电机与拖动》实验报告 实验题目名称:直流电动机启动、调速控制电路 实验室名称:电机及自动控制 实验组号:X组指导教师:XXX 报告人:XXX 学号:XXXXXXXXX 实验地点:XXXX 实验时间:20XX年XX月X日指导教师评阅意见与成绩评定
一、实验目的 掌握直流电动机电枢电路串电阻起动的方法; 掌握直流电动机改变电枢电阻调速的方法; 掌握直流电动机的制动方法; 二、实验仪器和设备 三、实验内容 (1)电动机数据和主要实验设备的技术数据
四、实验原理 直流电动机的起动:包括降低电枢电压起动与增加电枢电阻起动,降低电枢电压起动需要有可调节电压的专用直流电源给电动机的电枢电路供电,优点是起动平稳,起动过程中能量损耗小,缺点是初期投资较大;增加电枢电阻起动有有级(电机额定功率较小)、无极(电机额定功率较大)之分。是在起动之前将变阻器调到最大,再接通电源,随着转速的升高逐渐减小电阻到零。 直流电动机的调速:改变Ra、Ua和?中的任意一个使转子转速发生变化。 直流电动机的制动:使直流电动机停止转动。制动方式有能耗制动:制动时电源断开,立即与电阻相连,使电机处于发电状态,将动能转化成电能消耗在电路内。反接制动:制动时让E与Ua的作用方向一致,共同产生电流使电动机转换的电能与输入电能一起消耗在电路中。回馈制动:制动时电机的转速大于理想空转,电机处于发电状态,将动能转换成电能回馈给电网。 五、实验内容 (一)、实验报告经指导教师审阅批准后方可进入实验室实验 (二)、将本次实验所需的仪器设备放置于工作台上并检查其是否正常运行,检验正常后将所需型号和技术数据填入到相应的表内(若是在检验中发现 问题要及时调换器件) (三)、按实验前准备的实验步骤实验
利用继电器控制直流电机
一实验题目利用继电器控制直流电机 二实验目的 1 运用继电器控制并掌握其基本方法和编程 2 掌握用继电器控制电机的驱动原理 3 通过继电器来控制电机的停止与转动,从而将实际中的工业电机控制在实验台上进行模拟。 4 通过微机原理课程设计,熟练掌握汇编语言的编程方法,将理论联系到实际中去,在实际中学习理论知识,从而提高我们的动手实践的能力。 三实验内容 1 实验原理:本实验是通过继电器的断开与闭合来控制电机的转动与停止。继电器是一种电子控制器件,它具有控制系统和被控制系统,通常应用于自动控制电路中,它实际上是用较小的电流去控制较大的电流的一种“自动开关”。故在电路中起着自动调节,安全保护,转换电路等作用。电机可采用进步电机或直流电机。两者的驱动方式不同。此次试验我们采用的是直流电机。 2 硬件线路原理如上实验接线图所示
(1)利用8255A的PB0输出高低电平,控制继电器的开合,以实现对电机转动和停止的控制。 (2)线路连接 1 将000-01F接至8255的cs端 2将8255的PB0接至继电器的JNZ端 3将继电器的JK端接至电机端 4将继电器的JZ端接地 5电机的另一端接至+5V电压 3 实验之前所准备的知识 电磁式继电器一般由铁芯、线圈、衔铁、触点簧片等组成的。只要在线圈两端加上一定的电压,线圈中就会流过一定的电流,从而产生电磁效应,衔铁就会在电磁力吸引的作用下克服返回弹簧的拉力吸向铁芯,从而带动衔铁的动触点与静触点(常开触点)吸合。当线圈断电后,电磁的吸力也随之消失,衔铁就会在弹簧的反作用力返回原来的位置,使动触点与原来的静触点(常闭触点)吸合。这样吸合、释放,从而达到了在电路中的导通、切断的目的。对于继电器的「常开、常闭」触点,可以这样来区分:继电器线圈未通电时处于断开状态的静触点,称为「常开触点」;处于接通状态的静触点称为「常闭触点」。 控制电路通过发出控制电路到继电器,继电器控制供电路中联通与否,这样来达到控制寝室中供电限制的目的。 继电器的原理图如下: 四系统所选用各芯片的介绍 可编程并行接口芯片8255A’ (1)8255A内部结构 8255A内部由PA、PB、PC三个8位可编程双向I/O口,A组控制器和 B组控制器,数据缓冲器及读写控制逻辑四部分电路组成。 (2)8255A的引脚功能 数据总线(8条):D0~D7,用于传送CPU和8255A间的数据、命令和状态字。控制总线(6条): RESET:复位线,高电平有效。 /CS:片选线,低电平有效。 /RD、/WR:/RD为读命令线,/WR为写命令线,皆为低电平有效。 A0、A1:地址输入线:用于选中PA、PB、PC口和控制寄存器中哪一个工作。
直流电机转速控制实验报告
自动控制原理实验 实验报告
直流电机转速控制设计 一、实验目的 1、了解直流电机转速测量与控制的基本原理。 2、掌握LabVIEW图形化编程方法,编写直流电机转速控制系统程序。 3、熟悉PID参数对系统性能的影响,通过PID参数调整掌握PID控制原理。 二、实验设备与器件 计算机、NI ELVIS II多功能虚拟仪器综合实验平台、LabVIEW软件、万用表、12V直流电机、光电管,电阻、导线。 三、实验原理 直流电机转速测量与控制系统的基本原理是:通过调节直流电机的输入电压大小调节电机转速;利用光电管将电机转速转换为一定周期的光电脉冲、采样脉冲信号,获取脉冲周期。将脉冲的周期变换为脉冲频率,再将脉冲频率换算为电机转速;比较电机的测量转速与设定转速,将转速偏差信号送入PID控制器,由PID控制器输出控制电压,通可变电源输出作为直流电机的输入电压,实现电机转速的控制。 四、实验过程 (1)在实验板上搭建出电机转速光电检测电路 将光电管、直流电机安装在实验板上的合适位置,使得直流电机的圆片恰好在光电管之中,用导线将光电管与相应阻值的电阻相连,并将电路与相应的接口相连,连接好的电路图如下。
(2)编写程序,实现PID控制 SP为期望转速输出,是用户通过转盘输入期望的转速;PV为实际测量得到的电机转速,通过光电开关测量马达转速可以得到;MV为PID输出控制电压,将其接到“模拟DBL”模块,实现控制电源产生所需的直流电机控制电压。通过不断地检测马达转速与期望值对比产生偏差,通过PID控制器产生控制信号,实现对直流电机转速的控制。 编写的程序如下图所示
五、调试过程及结果 PID参数调整如下时,系统出现了振荡现象,导致了系统的不稳定。 于是将参数kc调小,调整后的参数如下: 系统出现了一定程度的超调,不满足实际的应用。 继续将Ti参数调大,并加入移位寄存器,对转速测量值取滑动平均,得到较为理想的
DSP原理与应用实验3直流电机控制实验
课程名称DSP原理与应用 实验序号实验3 实验项目直流电机控制实验 实验地点 实验学时实验类型 指导教师实验员 专业班级 学号姓名 年月日
教 师 评 语 一、实验目的及要求 1、了解直流电机驱动的原理; 2、了解直流电机驱动的实现过程。 二、实验原理与内容 1、直流电机的驱动: 上图是直流电机翻译/驱动的典型电路的一个变种,采用这种电路不但能够完成直 流电机驱动的动作,而且可以避免典型H 桥电路潜在的短路危险。针对SEED-DEC 中直流电机系统动作要求和电机的特点,电机驱动电路设计思路如下: 1) 电机采用15V 直流电源供电,串接50Ω@3W 电阻限流并分压; 2 路控制信号X、Y 由SEED-DTK_MBoard 提供,信号为CMOS 标准电平; 2) 使用达灵顿管TIP31C 代替BD679 作为电机驱动开关,基级串接100Ω电阻; 3) 使用快速二极管1N4007 完成保护功能,以免电机换向时烧毁电机; 4) 电机电源/地之间跨接电容,电机地与数字地之间采用磁珠连接共地; 2、直流电机的驱动接口: 该控制寄存器实现电机运行状态控制。
直流电机的驱动控制寄存器映射的I/O 端口为0x421C0004,其说明如下: D7 D6 D5 D4 D3 D2 D1 D0 X X X X X X LN2 LN1 当LN[2:1]=11 时:直流电机刹车; 当LN[2:1]=01 时:直流电机正转; 3、PWM 驱动 该控制寄存器实现电机驱动电路的控制。 其映射地址为:0x44000001,功能说明如下: D7 D6 D5 D4 D3 D2 D1 D0 X X X X X X CNTL1 CNTL0 直流电机的PWM 驱动控制管脚为CNTL0。通过控制CNTL0 的输出,实现PWM 驱动电路的导通与关断。 向0x44000001 地址赋值1 时,控制CNTL0 输出高电平 注意: 当使直流电机停止转动时要使LN[2:1]=11,同是使CNTL0 的输出为低电平。 4、程序流程图
a直流电机实验报告4
直流电机实验报告 课程名:电机学与电力拖动 姓名:李静怡 学院:电气工程学院 班级:电气1108班 学号:11291240 指导老师:郭芳
2-2直流发电机 一、实验目的 1、掌握用实验方法测定直流发电机的各种运行特性,并根据所测得的运行特性评定该被试电机的有关性能。 2、通过实验观察并励发电机的自励过程和自励条件。 二、预习要点 1、什么是发电机的运行特性?在求取直流发电机的特性曲线时,哪些物理量应保持不变,哪些物理量应测取。 2、做空载特性实验时,励磁电流为什么必须保持单方向调节? 3、并励发电机的自励条件有哪些?当发电机不能自励时应如何处理? 4、如何确定复励发电机是积复励还是差复励? 三、实验项目 1、他励发电机实验 (1)测空载特性保持n=n N使I L=0,测取U0=f(I f)。 (2)测外特性保持n=n N使I f=I fN,测取U=f(I L)。 (3)测调节特性保持n=n N使U=U N,测取I f=f(I L)。 2、并励发电机实验 (1)观察自励过程 (2)测外特性保持n=n N使R f2=常数,测取U=f(I L)。 3、复励发电机实验 积复励发电机外特性保持n=n N使R f2=常数,测取U=f(I L)。 四、实验设备及挂件排列顺序 1、实验设备
2、屏上挂件排列顺序 D55-4,D31、D44、D31、D42、D51 五、实验方法 1、他励直流发电机(必做) 按图1-2-1接线。图中直流发电机G 选用DJ13,其额定值PN =100W ,UN =200V ,IN =0.5A ,nN =1600r/min 。直流电动机DJ23-1作为G 的原动机(按他励电动机接线)。涡流测功机、发电机及直流电动机由联轴器同轴联接。 开关S 选用D51组件上的双刀双掷开关。Rf1选用D44的1800Ω变阻器,Rf2 选用D42的900Ω变阻器,并采用分压法接线。R1选用D44的180Ω变阻器。R2为发电机的负载电阻选用D42,采用串并联接法(900Ω与900Ω电阻串联加上900Ω与900Ω并联),阻值为2250Ω。当负载电流大于0.4 A 时用并联部分,而将串联部分阻值调到最小并用导线短接。直流电流表、电压表选用D31、并选择合适的量程。 图1-2-1直流他励发电机接线图 励磁电源 S