机床主轴的动力学建模及优化设计
前言
机床主轴的性能正在向高转速、高精
度、高刚度方向发展,通过对机床主轴动
态特性的有限元分析,为改善机床主轴的
静动态特性提供必要的理论依据和数据,
不仅能在产品设计阶段就能对主轴部件动
机床主轴的
动力学建模及优化设计
吴化勇 山东理工大学工程技术学院 255012
态特性作出符合实际的预测并提出改进方
向,还可以在短时间内作出多种方案比
较,使机床主轴实现优化设计,进而提高
产品一次设计成功率、缩短产品开发周
期,提高加工中心产品的设计水平。
1 主轴部件的有限元建模
CA6140机床主轴为阶梯轴,可以简
化为一个线弹性系统,其运动微分方程可
以写为:
(1)
图1 力学模型
图1(a) 有限元模型
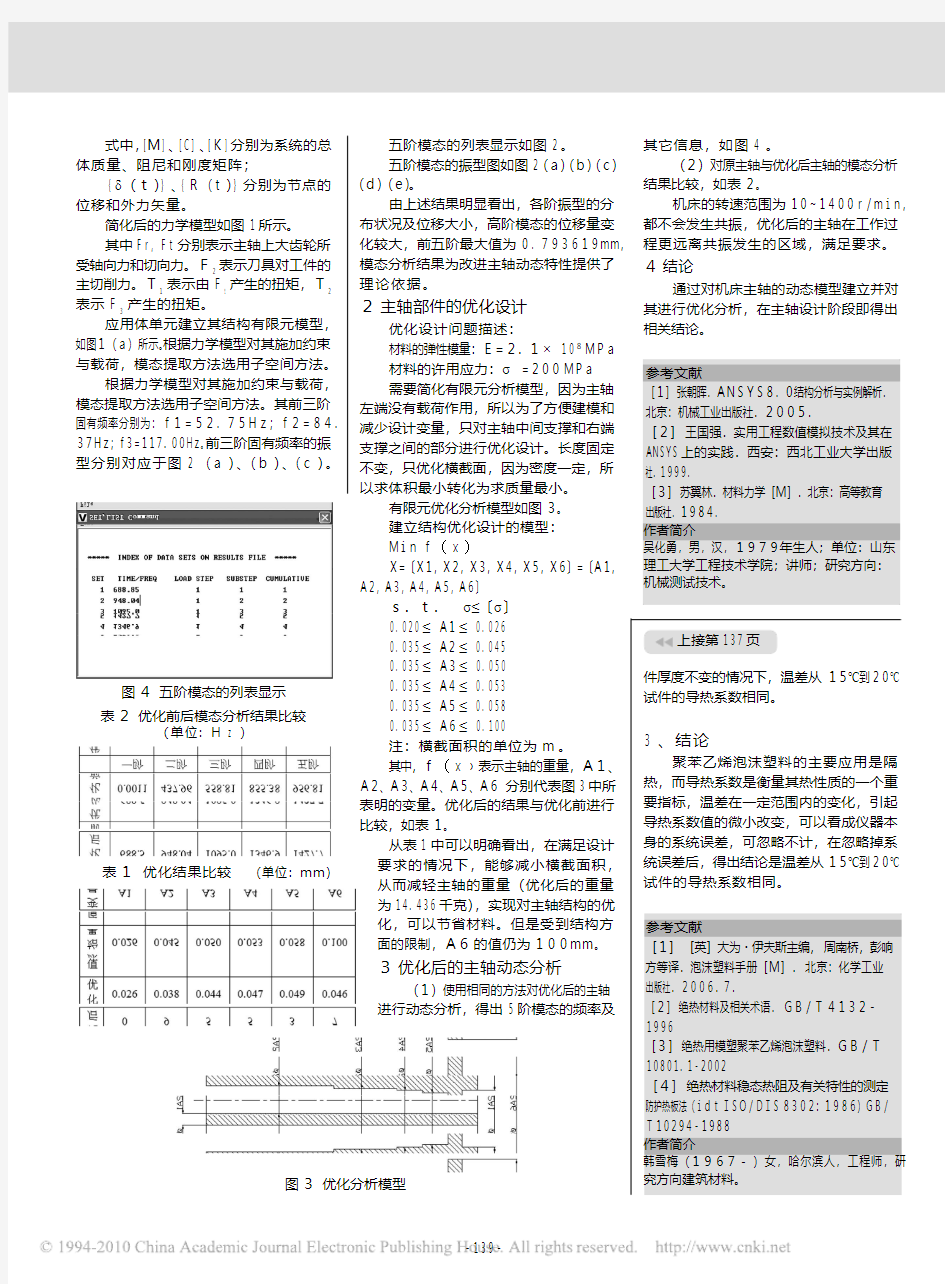
图2(e) 五阶模态的振型图
最大变形位于主轴后端位置,最大位移量0.793619mm。
图2(d) 四阶模态的振型图
最大变形位于主轴前端位置,最大位移量0.326109 mm。
图2(c) 三阶模态的振型图
最大变形位于主轴中间位置,但与二阶模态变形的方向不
同,最大位移量0.291149 mm。
图2(b) 二阶模态的振型图
最大变形位于主轴中间位置,最大位移量为0.280559mm。
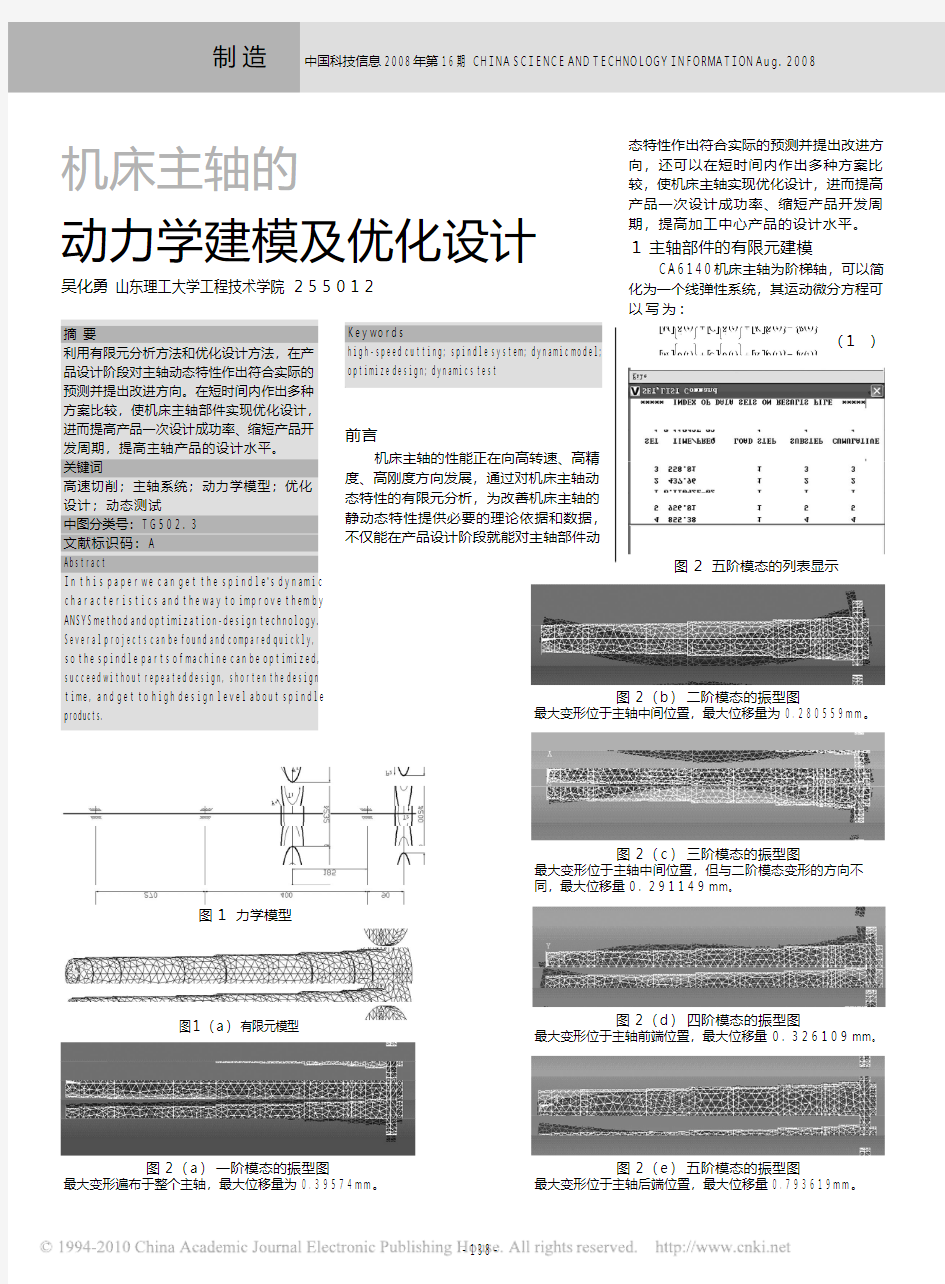
图2(a) 一阶模态的振型图
最大变形遍布于整个主轴,最大位移量为0.39574mm。
图2 五阶模态的列表显示
式中,[M]、[C]、[K]分别为系统的总体质量、阻尼和刚度矩阵;{δ(t)}、{R(t)}分别为节点的位移和外力矢量。
简化后的力学模型如图1所示。
其中Fr, Ft分别表示主轴上大齿轮所
受轴向力和切向力。F2表示刀具对工件的
主切削力。T1表示由Ft产生的扭矩,T2
表示F3产生的扭矩。应用体单元建立其结构有限元模型,如图1(a)所示。根据力学模型对其施加约束与载荷,模态提取方法选用子空间方法。根据力学模型对其施加约束与载荷,模态提取方法选用子空间方法。其前三阶固有频率分别为:f1=52.75Hz;f2=84.37Hz;f3=117.00Hz。前三阶固有频率的振型分别对应于图2(a)、(b)、(c)。五阶模态的列表显示如图2。五阶模态的振型图如图2(a)(b)(c)
(d)
(e)。由上述结果明显看出,各阶振型的分布状况及位移大小,高阶模态的位移量变化较大,前五阶最大值为0.793619mm,模态分析结果为改进主轴动态特性提供了理论依据。2 主轴部件的优化设计
优化设计问题描述:材料的弹性模量:E=2.1×108 MPa材料的许用应力:σ=200 MPa
需要简化有限元分析模型,因为主轴左端没有载荷作用,所以为了方便建模和减少设计变量,只对主轴中间支撑和右端支撑之间的部分进行优化设计。长度固定不变,只优化横截面,因为密度一定,所
以求体积最小转化为求质量最小。
有限元优化分析模型如图3。建立结构优化设计的模型:Min f﹙x﹚
X=〔X1,X2,X3,X4,X5,X6〕=〔A1,A2,A3,A4,A5,A6〕
s.t. σ≤〔σ〕0.020≤A1≤0.0260.035≤A2≤0.0450.035≤A3≤0.0500.035≤A4≤0.0530.035≤A5≤0.058
0.035≤A6≤0.100注:横截面积的单位为m。
其中,f﹙x﹚表示主轴的重量,A1、A2、A3、A4、A5、A6分别代表图3中所表明的变量。优化后的结果与优化前进行比较,如表1。
从表1中可以明确看出,在满足设计要求的情况下,能够减小横截面积,从而减轻主轴的重量(优化后的重量为14.436千克),实现对主轴结构的优化,可以节省材料。但是受到结构方面的限制,A6的值仍为100mm。
3 优化后的主轴动态分析
(1)使用相同的方法对优化后的主轴进行动态分析,得出5阶模态的频率及
表1 优化结果比较 (单位:mm)
表2 优化前后模态分析结果比较
(单位:Hz)
图4 五阶模态的列表显示
图3 优化分析模型
其它信息,如图4。
(2)对原主轴与优化后主轴的模态分析结果比较,如表2。
机床的转速范围为10~1400r/min,都不会发生共振,优化后的主轴在工作过程更远离共振发生的区域,满足要求。
4 结论
通过对机床主轴的动态模型建立并对其进行优化分析,在主轴设计阶段即得出相关结论。
机械动力学论文
上海大学2015 ~2016学年秋季学期研究生课程考试 课程名称:机械动力学课程编号: 09Z078001 论文题目: 机械动力学在机械行业的应用与发展 研究生姓名: 学号: 论文评语: 成绩: 任课教师: 刘树林 评阅日期:
机械动力学在机械行业中的应用及发展 (上海大学机电工程与自动化学院,上海200072) 摘要:机械动力学在实际中的应用有很多方面,应用在机械行业是一个主要方向。机械动力学是数控机床和机器人实现智能化发展的基础之一。本文在阐述机械动力学发展的基础上,结合机器人中的实际应用重点分析。另外,引用最优控制理论的分析方法将会对机械动力学分析有着很大的促进作用。 关键字:机械动力学,机器人,智能化,最优控制 The application and development of mechanical dynamics in machinery industry (Mechanical and electrical engineering and automation, Shanghai University, Shanghai 200072, China) Abstract: Mechanical dynamics in the actual application has many aspects, the application in the machinery industry is a main direction.Mechanical dynamics is one of the foundation for the development of the intelligence of NC machine and robots.In this paper, on the basis of the mechanical dynamics development, we are talking about robots combined with actual application.In addition,the reference analysis method of the optimal control theory will play great role in promoting of mechanical dynamics analysis. Key words: mechanical dynamics; robots; the intelligence;the optimal control 德国政府于2013年提出“工业4.0”的概念(1),推出不久,便引起了全球广泛的关注。“工业4.0”的三大主题:智能工厂、智能生产、智能物流。都离不开智能二字,未来的工业发展的目标也是智能化。中国也在加紧制定自己未来“工业4.0”的发展规划。那么,说到智能工厂、智能生产具体到实际中就是数控机床和机器人的智能化发展。而机械动力学是实现上述规划的发展动力和基础。 1 引言 随着工业的不断发展,机械行业在不断进步的同时(2),也呈现出了一些显著特点是,自动调节和控制装置日益成为机械不可缺少的组成部分。机械动力学的研究对象已扩展到包括不同特性的动力机构和控制调节装置在内的整个机械系统,控制理论已渗入到机械动力学的研究领域。高速、精密机械设计也都呈现了不同的特点,为了保证机械的精确度和稳定性,构件的弹性效应已成为设计中不容忽视的因素。例如,数控机床、机器人、车辆等设计。在某些机械的设计中,已提出变质量的机械动力学问题。各种模拟理论和方法以及运动和动力参数的测试方法,日益成为机械动力学研究的重要手段。 1.1 机械动力学研究的内容 任何机械,在存在运动的同时,都要受到力的作用。所谓机械动力学就是研究机械在力作用下的运动和机械在运动中产生的力,并从力与运动的相互作用的角度进行机械的设计和
数控机床主轴结构的改进和优化设计
数控机床主轴结构的改进和优化设计 严鹤飞 (天水星火机床有限责任公司技术中心 甘肃 天水 741024) 摘 要: 掌握机床主轴的关键部件,安装方式,轴承的调制环节以及材料、操作维护等,并且各种原因中又包含着多种影响因素互相交叉,因此必须对每个影响因素作具体分析。而对于优化设计理论的基本思想及其求解方法,将其应用于机床主轴的结构设计,建立了机床主轴结构优化设计的数学模型,并用内点惩罚函数法求解模型,得到了整体最优的结构设计方案,使机床主轴在满足各种约束要求条件下,刚度最好,材料最省。 关键词:机床主轴;轴承;调整;优化设计;数学模型 在数控机床中,主轴是最关键的部件,对机床起着至关重要的作用,主轴结构的设计首先考虑的是其需实现的功能,当然加工及装配的工艺性也是考虑的因素。 1. 数控机床主轴结构改进: 目前机床主轴设计普遍采用的结构如图1所示。图中主轴1支承在轴承4、5、8上,轴承的轴向定位通过主轴上的三个压块紧锁螺母3、7、9来实现。主轴系统的精度取决于主轴及相关零件的加工精度、轴承的精度等级和主轴的装配质量。在图1中主轴双列圆锥滚子轴承4的内锥孔与主轴1:12外锥配合的好坏将直接影响株洲的工作精度,一般要求其配合接触面积大于75%,为了达到这一要求,除了在购买轴承时注意品牌和等级外,通常在设计时对主轴的要求较高,两端的同轴度为0.005mm,对其相关零件,如螺母3、7、9和隔套6的端面对主轴轴线的跳动要求也较高,其跳动值一般要求在0.008mm以内。对一般压块螺母的加工是很难保证这么高的精度的,因而经常出现主轴精度在装配时超差,最终不得不反复调整圆螺母的松紧,而勉强达到要求,但这样的结果往往是轴承偏紧,精度稳定性差,安装位置不精确,游隙不均匀,造成工作时温升较高,噪音大,震动厉害,影响工件的加工质量和轴承的寿命。但对于重型数控机床用圆锥滚子轴承其承载负荷大,运转平稳,精度调整好时,其对机床的精度保持性较好,可对与轻型及高速机床就不十分有力了。 图1 通用机床主轴结构图 1— 主轴;2—法兰盘;3—圆螺母;4—双列圆柱滚子轴承;5—球轴承 6— 调整垫;7—圆螺母;8—双列圆柱滚子轴承;9-螺母
02-课件:5-4 机器人动力学建模(牛顿-欧拉法)
连杆动力学方程(牛顿-欧拉递推方法) 将机器人的连杆看成刚体,其质心加速度、总质量、角速度、 角加速度、惯性 张量与作用力矩满足如下关系: 牛顿第二定律 (力平衡方程) ()/ci i ci i ci d m dt m ==f v v 欧拉方程 (力矩平衡方程)()()/c c c ci i i i i d dt ==+?i i i n I ωI ω ωI ω
连杆动力学方程(牛顿-欧拉递推方法)
欧拉方程公式推导 v 为质心移动速度(移动时与惯性力相关)坐标系旋转时,惯性张量不是常量()()/c c c ci i i i i d dt ==+?i i i n I ωI ωωI ω ()() =[()] =[] =()c c c ci i i i c c i i i c c i i i c c i i i d d dt dt S ==+++?+?i i i i i i i i i n I ωI ωωI I ωωωI I ωωωI I ωωI ω ()()g d m dt =?+??+N I ωωI ωρ×v
力和力矩平衡方程 i i+1i-1iP i+1i fi i n i i f i+1i n i+1连杆i 在运动情况下,作用在上面 的合力为零,得力平衡方程式 (暂时不考虑重力): (将惯性力作为静力来考虑) 1 11f f R f +++=-i i i i ci i i i
力和力矩平衡方程 作用在连杆i 上的合力矩等于零,得力矩平衡方程式:1111111i i i i i i i i i ci i i i ci ci i i i +++++++=- -?-?n n R n r f P R f 将上式写成从末端连杆向内迭代的形式:111i i i i i i i ci +++=+f R f f 1111111i i i i i i i i i i i i ci ci ci i i i +++++++=++?+?n R n n r f P R f 利用这些公式可以从末端连杆n 开始,顺次向内递推直至到操作臂的基座。
机床动力学分析开题报告
开题报告 机床动力学分析 1 选题的背景、意义 1.1 机床动力学分析的背景 众所周知,在机床加工过程中,振动的危害极大,尤其对于超精密机床。使用金刚石刀具作超精密切削时,要求机床工作极其平稳,振动极小,否则很难保证较高的加工精度和超光滑的表面质量。因此,对机床的动力学分析就成为超精密加工中,保障加工质量的关键技术之一。 通过查阅大量的资料文献发现,目前国内外对机床的主轴、导轨等单个零件的动力学分析有很多,但是对机床整机的动力学研究就相对少很多。有介绍机床整机的动力学分析的也是大概笼统的介绍了下,很少有很详细全面的研究。对于这种情况大致了解了到是因为对机床整机进行动力学分析,因为机床本身的体积很大,很难进行有效的激振,需要考虑的因素较多。例如:机床整机不是一个单一的零件,做动力学分析难度较大;机床整机的体积较大,外界环境的干扰较大;所以做机床整机的动力学分析,想要得到有效的动力学数据,必须合理的设计实验步骤和实验平台。 机床的加工性能与其动力学特性非常密切,其动态性能(振动、噪声及稳定性等)是影响其工作性能及品质质量最重要的性能指标。随着机床向高精度、高表面质量和高生产率方向发展,关于机床的振动问题,近年来备受关注。其加工精度很大程度上取决与切屑加工过程中机床的振动,振动的产生不仅制约了数控机床的生产效率,而且还会在加工工件的表面留下波纹,这大大影响了机床加工精度。因此,对机床的动力学研究一直以来都是一个重要的课题。我国及世界其他国家都在竞相发展以高速、高精、高效为主要特征的超精密机床,对这类机床进行动力学优化就显得更加重要。对于高速精密机床而言,进行机床动力学特性分析,了解机床结构本身具有的刚度特性即机床的固有频率和主振型,将避免在使用中因振动造成不必要的损失。 1.2 机床动力学分析的意义
数控机床主轴部件结构
数控机床主轴部件结构 主轴部件是数控机床的核心部件,其运转精确度、耐磨性能、防震性能、机械强度等都会影响到工件加工的质量,再加上操作过程中还会有环境的影响以及人为因素的影响,工件加工的质量就更难得到保证。所以要从可控的方面着手,将一切可控因素都调整到位,比如数控机床的主轴结构设计以及主轴结构的日常维护等。 目前所使用的数控机床类型主要包括数控车床、数控铣床以及工件加工中心。 1.数控车床主轴部件结构特点 (1)主轴的主体结构是一个空心阶梯轴。 (2)主轴的前面部分主要由法兰盘和专门的卡盘结构组成。 (3)主轴的后面部分放置回转油缸。 (4)主轴空心部分用于设置油缸的活塞杆。 (5)车床的传动装置主要有齿轮传动、传送带传送以及齿轮-传送带组合传动等方式。 (6)驱动器主要作用是连接电动机,驱动数控车床的运转。 (7)光电脉冲编码器,用于测量主轴的转动速度,并
及时反馈信息至数控系统。 (8)回转油缸的主要作用是通过调整液压来控制卡盘装置与法兰盘的结合与分离。 2.数控铣床主轴部件结构特点 (1)同数控车床一样,主轴的中心是空心的。 (2)主轴的前面部分是一个比例为7:24的锥型孔洞,并且在端面上设有一对专门的主轴转矩检测装置将主轴转矩数据传输给铣刀。 (3)主轴的后面部分设有液压缸装置用于放松铣刀。 (4)主轴中间的空心部分用于弹簧的安装、以及铣刀固定刀爪的安装等。 (5)主轴的传动装置主要是齿轮传动,而且是变速传动。 (6)电气结构与数控车床相似,驱动器用于连接电动机,驱动数控铣床的运转;光电脉冲编码器,用于测量主轴的转动速度,并及时反馈信息至数控系统;液压缸的主要作用是通过调整液压来控制回路。 3.工件加工中心主轴部件结构特点 工件加工中心主轴部件的大致结构与数控铣床相类似,唯一不同的地方在于工件加工中心自带刀库和自动换刀的装置,自动化程度相对较高,在控制结构上与数控铣刀会有所不同,具体表现在:
机械动力学简史
机械动力学简史 一.动力学简介 机械动力学作为机械原理的重要组成部分,主要研究机械在运转过程中的受力,机械中各部分构件的质量和构件之间机械运动的相互关系,是现代机械设计的重要理论基础。 一般来说,机械动力学的研究内容包括六个方面:(1)在已知外力作用下求机械系统的真实运动规律;(2)分析机械运动过程中各构件之间的相互作用力;(3)研究回转构件和机构平衡的理论和方法;(4)研究机械运转过程中能量的平衡和分配关系;(5)机械振动的分析研究;(6)机构分析和机构综合。其主要研究方向是机械在力的作用下的运动和机械在运动过程中产生的力,并且从力和相互作用的角度对机械进行设计和改进的学科。 二.动力学的前期发展 人类的发展过程中,很重要的一个进步特征就是工具的使用和制造。从石器时代的各种石制工具开始,机械的形式开始发展起来。从简单的工具形式,到包含各类零件、部件的较为先进的机械,这中间的发展过程经历了不断的改进与反复,也经历了在国家内部与国家之间的传播过程。 机械的发展过程也经历了从人自身的体力,到利用畜力、风力和水力等,材料的类型也从自然中自有的,过渡到简单的人造材料。整个发展过程最终形成了包含动力、传动和工作等部分的完整机械。 人类从石器时代进入青铜时代、铁器时代,用以吹旺炉火的鼓风器的发展起了重要作用。有足够强大的鼓风器,才能使冶金炉获得足够高的炉温,才能从矿石中炼得金属。中国在公元前1000~前900年就已有了冶铸用的鼓风器,并渐从人力鼓风发展到畜力和水力鼓风。早在公元前,中国已在指南车上应用复杂的齿轮系统。古希腊已有圆柱齿轮、圆锥齿轮和蜗杆传动的记载。但是,关于齿轮传动瞬时速比与齿形的关系和齿形曲线的选择,直到17世纪之后方有理论阐述。手摇把和踏板机构是曲柄连杆机构的先驱,在各文明古国都有悠久历史,但是曲柄连杆机构的形式、运动和动力的确切分析和综合,则是近代机构学的成就。 近代的机械动力学,在动力以及机械结构本身来说,具有各方面的重大突破。动力在整个生产过程中占据关键地位。随着机械的改进,对于金属和矿石的需求量增加,人类开始在原有的人力和畜力的基础上,利用水力和风力对机械进行驱动,但是这也造成了很多工厂的选址的限制,并不具有很大的推广性。而后来稍晚出现的纽科门大气式蒸汽机,虽然也可以驱使一些机械,但是其燃料的利用率很低,对于燃料的需求量太大,这也使得这种蒸汽机只能应用于煤矿附近。 瓦特发明的具有分开的凝汽器的蒸汽机以及具有回转力的蒸汽机,不仅降低了燃料的消耗量,也很大程度上扩大了蒸汽机的应用范围。蒸汽机的发明和发展,使矿业和工业生产、铁路和航运都得以机械动力化。蒸汽机几乎是19世纪唯一的动力源。但蒸汽机及其锅炉、凝汽器、冷却水系统等体积庞大、笨重,应用很不方便。 19世纪末,电力供应系统和电动机开始发展和推广。20世纪初,电动机已在工业生产中取代了蒸汽机,成为驱动各种工作机械的基本动力。生产的机械化已离不开电气化,而电气化则通过机械化才对生产发挥作用。 发电站初期应用蒸汽机为原动机。20世纪初期,出现了高效率、高转速、大功率的汽轮机,也出现了适应各种水力资源的大、小功率的水轮机,促进了电力供应系统的蓬勃发展。19世纪后期发明的内燃机经过逐年改进,成为轻而小、效率高、易于操纵、并可随时启动的原动机。它先被fuqu用以驱动没有电力供应的陆上工作机械,以后又用于汽车、移动机
精密机床实体建模与动力学分析【开题报告】
毕业设计开题报告 机械设计制造及自动化 精密机床实体建模与动力学分析 1选题的背景、意义 近20年来,机床不断向高速和精密方向发展。基于材料去除的冷加工技术, 从本世纪60 年代初美国用单点金刚石刀具对电解铜进行加工,并成功地切削出镜面以来, 在加工精度方面发生了质的变化, 促使了超精密加工技术的产生和发展。一般认为, 被加工零件的尺寸和形位误差小于零点几微米, 表面粗糙度介于几纳米到十几纳米之间的加工技术, 是超精密加工技术。精密和超精密加工技术的发展,直接影响到一个国家尖端技术和国防工业的发展,因此世界各国对此都极为重视,投入很大力量进行研究开发,同时实行技术保密,控制关键加工技术及设备出口。随着航空航天、高精密仪器仪表、惯导平台、光学和激光等技术的迅速发展和多领域的广泛应用,对各种高精度复杂零件、光学零件、高精度平面、曲面和复杂形状的加工需求日益迫切。目前国外已开发了多种精密和超精密车削、磨削、抛光等机床设备,发展了新的精密加工和精密测量技术[1]。机床工业是装备制造业和国防工业的基础。机床切削时的振动和变形不仅直接影响机床的动态精度和工件的加工质量,而且会导致生产效率下降、刀具磨损加剧,甚至直接导致机床故障和使用寿命缩短。提高精密机床的加工精度迫在眉睫。精密、超精密机床振源主要来源于机内振源和机外振源。其中,机内振源主要来源于机床各主轴伺服驱动系统与传动系统的振动,包括转子旋转不平衡及电磁力不平衡引起的振动;机床回转零件的不平衡引起的振动;运动传递过程中引起的振动;往复部件运动的惯性力引起的惯性力振动;切削时的冲击振动等。超精密机床机外振源主要来源于其它机床、锻压设备、火车、汽车等通过地基传给机床的振动等。因此,对机床动力学特性进行深入研究十分必要。 这种高要求的设计理念要求设计人员在设计过程中,对机床的动态特性进行研究。对于高速精密机床而言,进行机床动态特性分析和优化设计更为重要。 高速精密机床系统动力学是以精密机床为对象,以结构动力学、加工系统动
机床动力学特性研究
机床动力学特性研究 摘要 介绍机床主轴系统动力学和基于非线性的数控机床结合部动力学特性的研究进展以及基于空间统计学的机床动力学特性。主轴系统的建模、动态特性的研究方法、轴承参数及加工条件等多种因素对机床主轴动力学特性的影响方面作了系统阐述,简要介绍主轴系统的优化设计方法以及结构改进。由于结合部存在着变刚度、变阻尼、迟滞等非线性行为,因此文章指出只有从非线性动力学角度研究结合部,才能适应研发高档数控机床的需要。并明确了从非线性角度研究结合部的主要研究内容和可以采用的研究方法。 abstract This paper introduces the dynamics of machine tool spindle system and the dynamic characteristics of CNC machine tool joints based on nonlinearity, and the dynamic characteristics of machine tools based on spatial statistics. The main shaft system modeling, the dynamic characteristic research method, the bearing parameter and the processing condition and so on many kinds of factors to the machine tool spindle dynamics characteristic aspect has made the system elaboration, briefly introduced the spindle system optimization design method as well as the structure improvement. Due to the non-linear behaviors such as variable stiffness, variable damping and hysteresis in the joint, it is pointed out that only by studying the joint part from the non-linear dynamics, can we meet the needs of high-end CNC machine tools. And the main research contents and the research methods that can be used are studied from the non-linear angle. 前言:众所周知,在机床加工过程中,振动的危害极大,尤其对于超精密机床。使用金刚石刀具作超精密切削时,要求机床工作极其平稳,振动极小,否则很难保证较高的加工精度和超光滑的表面质量。因此,对机床的动力学分析就成为超精密加工中,保障加工质量的关键技术之一。 通过查阅大量的资料文献发现,目前国内外对机床的主轴、导轨等单个零件的动力学分析有很多,但是对机床整机的动力学研究就相对少很多。有介绍机床整机的动力学分析的也是大概笼统的介绍了下,很少有很详细全面的研究。对于这种情况大致了解了到是因为对机床整机进行动力学分析,因为机床本身的体积很大,很难进行有效的激振,需要考虑的因素较多。例如:机床整机不是一个单一的零件,做动力学分析难度较大;机床整机的体积较大,外界环境的干扰较大;所以做机床整机的动力学分析,想要得到有效的动力学数据,必须合理的设计实验步骤和实验平台。 机床的加工性能与其动力学特性非常密切,其动态性能(振动、噪声及稳定性等)是影响其工作性能及品质质量最重要的性能指标。随着机床向高精度、高表面质量和高生产率方向发展,关于机床的振动问题,近年来备受关注。其加工精度很大程度上取决于加工过程中机床的振动,振动的产生不仅制约了数控机床的生产效率,而且还会在加工工件的表面留下波纹,这大大影响了机床加工精度。因此,对机床的动力学研究一直以来都是一个重要的课题。我国及世界其他国家都在竞相发展以高速、高精、高效为主要特征的超精密机床,对这类机床进行动力学优化就显得更加重要。对于高速精密机床而言,进行机床动力学特性分析,了解机床结构本身具有的刚度特性即机床的固有频率和主振型,将可以避免在使用中因振动造成不必要的损失。
机床主轴结构优化设计
机床主轴结构优化设计【教学目标】 1.掌握优化设计方法与传统设计方法在轴设计上的异同 2.学会分析问题 3.掌握确定目标函数、设计变量、约束条件的方法 4.掌握计算方法的选择 【教学重点】 1.学会分析问题 2.掌握确定目标函数、设计变量、约束条件的方法【教学难点】 1.掌握确定目标函数、设计变量、约束条件的方法【教学过程】 一、以工程实际案例引入课题 【比较】轴的传统设计方法 经验法类比法设计更改繁琐且修改量较大 1、按扭转强度条件初步估算轴的直径
2、按弯扭合成强度计算轴的直径 3、按疲劳强度精确校核 4、按静强度条件进行校核 一、数学模型的建立 在设计这根主轴时,有两个重要因素需要考虑。一是主轴的自重;一是主轴伸出端c 点的挠度。 对于普通机床,不要求过高的加工精度,对机床主轴的优化设计,以选取主轴的自重最轻为目标,外伸端的挠度为约束条件。 当主轴的材料选定时,其设计方案由四个设计变量决定。孔径d 、外径D 、跨距l 及外伸端长度a 。由于机床主轴内孔用于通过待加工的棒料,其大小由机床型号决定。不作为设计变量。故设计变量取为 [][]123T T x x x x l da == 机床主轴优化设计的目标函数为 ()()()2213214f x x x x d πρ=+- 再确定约束条件 ()00 g x y y =-≤ 在外力F 给定的情况下,y 是设计变量x 的函数,其值按下式计算 ()23Fa l a y I π+=
()4464I D d π=- ()() ()23130442640 3Fx x x g x y E x d π+=-≤- 刚度满足条件,强度尚有富裕,因此应力约束条件可不考虑。边界约束条件为设计变量的取值范围,即 min max min max min max l l l D D D a a a ≤≤≤≤≤≤ 将所有的约束函数规格化,主轴优化设计的数学模型可表示为: ()()()()()() ()()()()2213223131044221min 32min 42max 53min 14 64/1031/0 1/0 /10 1/0 f x x x x d Fx x x g x y E x d g x x l g x x D g x x D g x x a πρπ=+-+=-≤-=-≤=-≤=-≤=-≤ 二、计算实例。 如图所示的主轴进行优化设计,已知主轴内径d=30mm,外力F=15000N, 许用挠度=0.05mm 。设计变量数n=3, 约束函数个数m=5, 收敛精度
机械系统动力学
《机械系统动力学》 机械系统动力学中分析中的 仿真前沿 学院:机械工程学院 专业:机制一班 姓名:董正凯 学号:S12080201006
摘要 计算机及其相应技术的发展为建立机械系统仿真提供了一个有效的手段,机械系统动力学中的许多难题均可以采用仿真技术来解决,本文主要讲述了目前在机械系统动力学的分析中仿真技术主要的研究重点及其研究中主要存在的问题。 关键词:机械系统动力学仿真系统建模
机械系统动力学中分析中的仿真前沿 机械专业既是一个传统的专业,又是一个不断融合新技术、不断创新的专业。随着科技的发展,计算机仿真技术越来越广泛地应用在各个领域。基于多体系统动力学的机械系统动力学分析与仿真技术,从二十世纪七十年代开始吸引了众多研究者,已解决了自动化建模和求解问题的基础理论问题,并于八十年代形成了一系列商业化软件,到了九十年代,机械系统动力学分析与仿真技术更已能成熟应用于工业界。 目前的研究重点表现在以下几个方面: (1)柔性多体系统动力学的建模理论 多刚体系统的建模理论已经成熟,目前柔性多体系统的建模成了一个研究热点,柔性多体系统动力学由于本身既存在大范围的刚体运动又存在弹性变形运动,因而其与有限元分析方法及多刚体力学分析方法有密切关系。事实上,绝对的刚体运动不存在,绝对的弹性动力学问题在工程实际中也少见,实际工程问题严格说都是柔性多体动力学问题,只不过为了问题的简化容易求解,不得不化简为多刚体动力学问题、结构动力学问题来处理。然而这给使用者带来了不便,同一个问题必须利用两种分析方法处理。大多商用软件系统采用的浮动标架法对处理小变形部件的柔性系统较为有效,对包含大变形部件的柔体多体系统会产生较大仿真分析误差甚至完全错误的仿真结论。最近提出的绝对节点坐标方法,是对有限元技术的拓展和较大创新,在常规有限元中梁单元、板壳单元采用节点微小转动作为节点坐标,因而不能精确描述刚体运动。绝对节点坐标法则采用节点位移和节点斜率作为节点坐标,其形函数可以描述任意刚体位移。利用这种方法梁和板壳可以看作是等参单元,系统的质量阵为一常数阵,然而其刚度阵为强非线性阵,这与浮动标架法有截然不同的区别。这种方法已成功应用于手术线的大变形仿真中。寻求有限元分析与多刚体力学的统一近年来成为多体动力学分析的一个研究热点,绝对节点坐标法在这方面有极大的潜力,可以说绝对节点坐标法是柔性多体力学发展的一个重要进展。另外,各种柔性多体的分析方法之间是否存在某种互推关系也引起了人们的注意,如两个主要分析方法:浮动标架法、绝对节点坐标法之间是否可以互推?这些都具有重大理论意义。 另外柔性多体系统动力学中由于大范围的刚体运动与弹性变形运动相互耦合,采用浮动标架法时,即便是小变形问题,由于处于高速旋转仍会产生动力刚化现象。如果仅仅采用小变形理论,将产生错误的结论,必须计及动力刚化效应。动力刚化现象已成为柔性多体动力学的一个重要研究方面。如何利用简单的补偿方法来考虑动力刚化是问题的关键。 柔性多体系统动力学中关于柔性体的离散化表达存在三种形式:基于有限元分析的模态表达,基于试验模态分析的模态表达和基于有限元节点坐标的有限元列式。有限元列式由于大大地增加了系统的求解规模使其应用受到限制,因而一般采用模态分析方法,对模态进行模态截断、模态综合,从而缩减系统的求解规模。为了保证求解精度,同时又能提高求解速度如何进行模态截断、模态综合就成了一个关键问题。再者如何充分利用试验模态分析的结果也是一个关键性研究课题,这一方面的研究还不够深入。 柔性多体系统动力学可以计算出每一时刻的弹性位移,通过计算应变可计算计算出应力。由于一般的多柔体分析程序不具备有限元分析功能,因而柔性体的应力分析都是由有限元程序处理。由于可以计算出每个柔性体的应力的变化历
机床动力学建模的拓展传递矩阵法
万方数据
万方数据
万方数据
万方数据
2010年11月吴文镜等:机床动力学建模的拓展传递矩阵法73 刀。Q=F(9)Q=E522'Jo+E623’10+E7乙110+ 毛毛.10+岛乞J0+Eloz7'j0+ 层Ilz8.10+层12磊.10+E13zF+E30zD(10) F=E14互.10+E15乞.10+巨6毛'lo+ 巨725’10+E18乙J0+E927'lo+ £20磊_lo+E2lz9.10+£22磊+E3l乞(11) 互.o=ElZ6.1+E227.I+E328.1+层429.1(12) 由式(7)~(11)得 (五oE5一E14)互Z2.o+(正oE6一E15)五z3.o+ (五oE7一E16)五乙.o+(五oE8一E17)毛z5.o+ (墨oE9一E18)r6瓦.1+(互oElo—E19)弓Z7.1+ (互oEll—E20)磊z8,1+(正。巨2一E21)写z9.1+ (7ioEl3一E22)z-+(7io岛。一百31)ZF=0(13) 由式(6)、(12)得 互,D(El乙,J+E227.1+E328.I+E4毛,1)=rl,』Z1.,(14)对于状态矢量磊'l、历'l、z8'1、而,1均为刚体1上的状态矢量,位移元素线性相关,有 易327.1=E24互,,(15) 易3磊,l=E25五,J(16) £2329.1=E26互.,(17)联合(13)~(17)将其写成矩阵的形式有 瓦lzalI=048×l(18)zall=(乏,o召。别,。罨。烈,。 z五磊。罨。z0砟磊)1 磊和Zo分别为激振点和拾振点的状态矢量,兀¨为48×69的高维矩阵。 3.2结合面参数 直线进给功能部件中主要存在直线滚动导轨结合面以及电动机定子与滑板之间的螺栓结合面。对于导轨结合面模型简化为1个法向线性弹簧一阻尼系统、1个横向的线性弹簧一阻尼系统和3个转动方向的扭转弹簧一阻尼系统,以综合反映结合部各方向的微幅振动。通过锤击试验分别测定导轨法向和横向及3个扭转方向的传递函数,定义法向为Z,横向为y,3个坐标轴分别为A、B、C。 根据单自南度系统振动方程计算出导轨各方向的接触刚度,根据半功率法计算接触阻尼。最终计算得到导轨结合面参数如表l所示。电动机与滑板之问的螺栓结合面参数如表2所示。导轨结合面参数测试结果见图7。 表l导轨结合部参数结果 参数数值 刚度kr/(MN?m‘1253 刚度kJ(GN?m“12.14 刚度“/(kN?m?rad。。1693 }94度ks/(MN?m?rad‘)1.73 刚度kd(kN?m?rad。1727 阻尼c;l(N?s?m“1641.5 阻尼cJ(N?s?m’)l034.9 雕尼“/(N?m?s?rad。)0.1447 阻尼c洲N?m?s?rad。。)2.011 阻尼Cc/(N?1tl?s?md1)09602 表2螺栓结合部参数 参数数值 刚度k,/(GN?m。。1o.25 刚度k,J(GN?m’)0,25 刚度kfl(GN?m。)2.10 阻尼c.r/(N?s?m。)125 阻尼e,I(N?s?m。。1125 阻尼c∥(N?s?m“)250 (a)测试现场 {||卜M以旷藩三h∥ 迎卜—t——专—上‘_妻蔫k套 图7导轨结合面参数测试结果 3.3滑板有限元自由度缩减模型建-fr 创建有限元自由度缩减模型首先采用通用有限元软件得到零件的有限元法(Finiteelementmethod,FEM)}-莫-型,根据零件特点选择质量集中点、 结合面连接节点、外力作用节点以及需要考察的节 万方数据
机械系统动力学仿真软件ADAMS培训教程
机械系统动力学仿真软件ADAMS培训教程(1周时间) 一机械系统动力学方程基础 以闭环矢量法为例,介绍平面机构的运动学方程推导,瞬态动力学方程求解,方程组装及在Matlab/simulink模块中的实现,让学生对动力学求解有一个感性的认识。 教学内容: 1.1 机构动力学分析。四杆机构,杆长分别为L1,L2,L3和L4, 其中,L3为机架,L1为匀速转动的原动件,杆L4受到一恒定的扭矩T的作用。求各杆的运动和受力。(图中的杆均为均质杆,质量为mi,转动惯量为Ii,i=1,2,3….) 1.2 画出上式的Matlab/Simulink仿真框图(10分) 1.3 编写S函数,并在Simulink中调试实现 使用知识:超越方程的求解,牛顿—莱布尼兹迭代法,相容性检测(位移,速度),任意点的运动信息输出 练习:曲柄滑块机构,从方程推导、矩阵方程组装,流程图,编程实现
二ADAMS软件工程介绍及机构动力学仿真 介绍ADAMS软件的功能,几何模型建立方法和第三方CAD模型导入技巧,材料属性配置,运动副、驱动和载荷的创建,仿真计算参数设置及计算结果后处理。介绍弹簧模型、接触模型和轮胎路谱模型(如果有车辆专业学员的话),凸轮副,齿轮模型等常用模型的仿真。 准备内容:机构三维几何模型,最好还有凸轮,齿轮等常用运动副。 介绍模型的构成,建模方法(含几何模型导入技巧),各种运动副、载荷的施加,接触模型参数设置,学会常见机构动力学分析,结果后处理,包括常用的各种测量的使用。 练习:常规运动,接触,轮胎路谱模型的应用,结果后处理。 三模型参数化,灵敏度分析及优化设计研究 介绍ADAMS的设计变量定义,常用函数的使用,模型形状、尺寸、材料参数化和位置方向参数化,建立各种状态变量、约束和目标函数的测量,进行灵敏度分析和优化设计研究,改进模型的设计。 参数优化几何建模,参数化材料特性、单元属性,本构关系参数。目标函数,约束的建立,灵敏度分析、优化求解参数设定。 练习:机构优化;减振系统优化;
数控机床整机动力学性能可视化分析与仿真
第8卷第1期 2010年3月中 国 工 程 机 械 学 报CH INESE JOURNAL OF CON S TRUCT I ON MACH INERY Vo.l 8N o .1 M ar .2010 基金项目:国家自然科学基金资助项目(50905029) 作者简介:关锡友(1964-),男,高级工程师.E-m a i :l xiyou _guan @s m tc.l co m 数控机床整机动力学性能可视化分析与仿真 关锡友1,孙 伟2 (1.沈阳机床(集团)有限责任公司,辽宁沈阳 110142; 2.东北大学机械工程与自动化学院,辽宁沈阳 110819) 摘要:将数控机床整机的动态性能分析与可视化设计方法相结合,以沈阳机床集团的某数控加工中心为例,提 出了整机动力学可视化设计流程,包括设计目标、设计内容以及设计方法;最后对该加工中心进行整机动态性能 可视化仿真,得出强度、固有特性以及谐响应情况,为该机床结构性能的优化提供依据. 关键词:数控机床;动力学性能;可视化;仿真 中图分类号:TG 502.14;TH 113 文献标识码:A 文章编号:1672-5581(2010)01-0001-06 V isualized anal ysis and si mu l ati on on dynam ic performance for NC machine assembl y GUAN X i-y ou 1,SUN W ei 2 (1.Shenyang M achi ne Too l (Group)Li m ited L i ability Co mpany ,Shenyang 110142,Chi na ;2.Schoo l of M echanical Engi neering &Auto m ati on ,N ortheastern U ni versity ,Shenyang 110819,Chi na) Abstract :By i n tegrati n g dyna m ic perf or m ance anal y sis w ith v isualized design m et hod on NC m achi n e assem bl y ,a NC m achi n i n g cent er produced by Shenyang M achine ToolG roup is used for case study .Accordingl y ,t he dynam ic v isualized des i g n procedure ,i n cluding design objectives ,opti o ns and m eth -ods ,is proposed .Based on t his notion ,t he dyna m ic perf or m ance ofm achi n ing center is visually s i m ula -t ed t o acquire the strengt h ,i n herent property and har m onic response .Therefore ,this approach set a ref erence to opti m iz i n g the m achine struct ural perfor m ance . Key words :nu m erical controlm achine too;l dyna m ic perfor m ance ;visualization ;s i m ulation 数控机床在工作过程中的振动会使工件和刀具的相对位置发生变化,进而影响了工件的加工精度及机床加工效率.振动还会加速刀具的磨损,产生振动噪音以及污染环境.因而在设计数控机床时必须高度重视数控机床的动力学设计,确保机床的振动控制在允许的范围内.目前,我国及世界其他国家都在竞相发展以高速、高精、高效为主要特征的高档数控机床[1] ,对于这类机床,动力学优化设计就显得更加重要. 可视化设计方法[2]是一种数字化的设计方法,强调在整个设计过程中全面应用计算机技术,对系统 进行模型构建、功能模拟和过程仿真等.通过可视化设计可以在机床整机制造加工之前,尽早发现由于设计不当所导致的可能出现的缺陷,进行修改;还可以在计算机上对数控机床整机进行模态及响应分析和仿真,得到振动系统的动态特性. 本文将可视化设计方法应用于数控机床整机的动态性能分析之中,结合沈阳机床集团自行设计研发的某数控加工中心,提出数控机床整机动力学可视化设计流程,并结合ANSYS W or kbench 软件对数控机床整机进行强度、模态和响应分析,为提高该机床的动态性能提供了依据.1 机床动态性能优化原理 优化机床的动态性能,就是通过相应的技术手段,确保机床具有足够的抗振能力.具体来说就是设计
基于动力学模型的轮式移动机器人运动控制_张洪宇
文章编号:1006-1576(2008)11-0079-04 基于动力学模型的轮式移动机器人运动控制 张洪宇,张鹏程,刘春明,宋金泽 (国防科技大学机电工程与自动化学院,湖南长沙 410073) 摘要:目前,对不确定非完整动力学系统进行设计的主要方法有自适应控制、预测控制、最优控制、智能控制等。结合WMR动力学建模理论的研究成果,对基于动力学模型的WMR运动控制器的设计和研究进展进行综述,并分析今后的重点研究方向。 关键词:轮式移动机器人;动力学模型;运动控制;非完整系统 中图分类号:TP242.6; TP273 文献标识码:A Move Control of Wheeled Mobile Robot Based on Dynamic Model ZHANG Hong-yu, ZHANG Peng-cheng, LIU Chun-ming, SONG Jin-ze (College of Electromechanical Engineering & Automation, National University of Defense Technology, Changsha 410073, China) Abstract: At present, methods of non-integrity dynamic systems design mainly include adaptive control, predictive control, optimal control, intelligence control and so on. Based on analyzing the recent results in modeling of WMR dynamics, a survey on motion control of WMR based on dynamic models was given. In addition, future research directions on related topics were also discussed. Keywords: Wheeled mobile robot; Dynamic model; Motion control; Non-integrity system 0 引言 随着生产的发展和科学技术的进步,移动机器人系统在工业、建筑、交通等实际领域具有越来越广泛的应用和需求。进入21世纪,随着移动机器人应用需求的扩大,其应用领域已从结构化的室内环境扩展到海洋、空间和极地、火山等环境。较之固定式机械手,移动机器人具有更广阔的运动空间,更强的灵活性。移动机器人的研究必须解决一系列问题,包括环境感知与建模、实时定位、路径规划、运动控制等,而其中运动控制又是移动机器人系统研究中的关键问题。故结合WMR动力学建模理论的研究成果,对基于动力学模型的WMR运动控制器设计理论和方法的研究进展进行研究。 1 WMR动力学建模 有关WMR早期的研究文献通常针对WMR的运动学模型。但对于高性能的WMR运动控制器设计,仅考虑运动学模型是不够的。文献[1]提出了带有动力小脚轮冗余驱动的移动机器人动力学建模方法,以及WMR接触稳定性问题和稳定接触条件。文献[2]提出一种新的WMR运动学建模的方法,这种方法是基于不平的地面,从每个轮子的雅可比矩阵中推出一个简洁的方程,在这新的方程中给出了车结构参数的物理概念,这样更容易写出从车到接触点的转换方程。文献[3]介绍了与机器人动作相关的每个轮子的雅可比矩阵,与旋转运动的等式合并得出每个轮子的运动方程。文献[4]基于LuGre干摩擦模型和轮胎动力学提出一种三维动力学轮胎/道路摩擦模型,不但考虑了轮胎的径向运动,同时也考虑了扰动和阻尼摩擦下动力学模型,模型不但可以应用在轮胎/道路情况下,也可应用在对车体控制中。在样例中校准模型参数和证实了模型,并用于广泛应用的“magic formula”中,这样更容易估计摩擦力。在文献[5]中同时考虑运动学和动力学约束,其中提出新的计算轮胎横向力方法,并证实了这种轮胎估计的方法比线性化的轮胎模型好,用非线性模型来模拟汽车和受力计算,建立差动驱动移动机器人模型,模型本身可以当作运动控制器。 2 WMR运动控制器设计的主要发展趋势 在WMR控制器设计中,文献[6]给出了全面的分析,WMR的反馈控制根据控制目标的不同,可以大致分为3类:轨迹跟踪(Trajectory tracking)、路径跟随(Path following)、点镇定(Point stabilization)。轨迹跟踪问题指在惯性坐标系中,机器人从给定的初始状态出发,到达并跟随给定的参考轨迹。路径跟随问题是指在惯性坐标系中,机器人从给定的初始状态出发,到达并跟随指定的几何 收稿日期:2008-05-19;修回日期:2008-07-16 作者简介:张洪宇(1978-)男,国防科学技术大学在读硕士生,从事模式识别与智能系统研究。 ,