传感器测速实验报告(第一组)
传感器测速实验报告
院系:
班级:
、
小组:
组员:
日期:2013年4月20日
实验二十霍尔转速传感器测速实验
一、实验目的
了解霍尔转速传感器的应用。
二、基本原理
利用霍尔效应表达式:U H=K H IB,当被测圆盘上装有N只磁性体时,圆盘每转一周磁场就变化N次。每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。
本实验采用3144E开关型霍尔传感器,当转盘上的磁钢转到传感器正下方时,传感器输出低电平,反之输出高电平
三、需用器件与单元
霍尔转速传感器、直流电源+5V,转动源2~24V、转动源电源、转速测量部分。
四、实验步骤
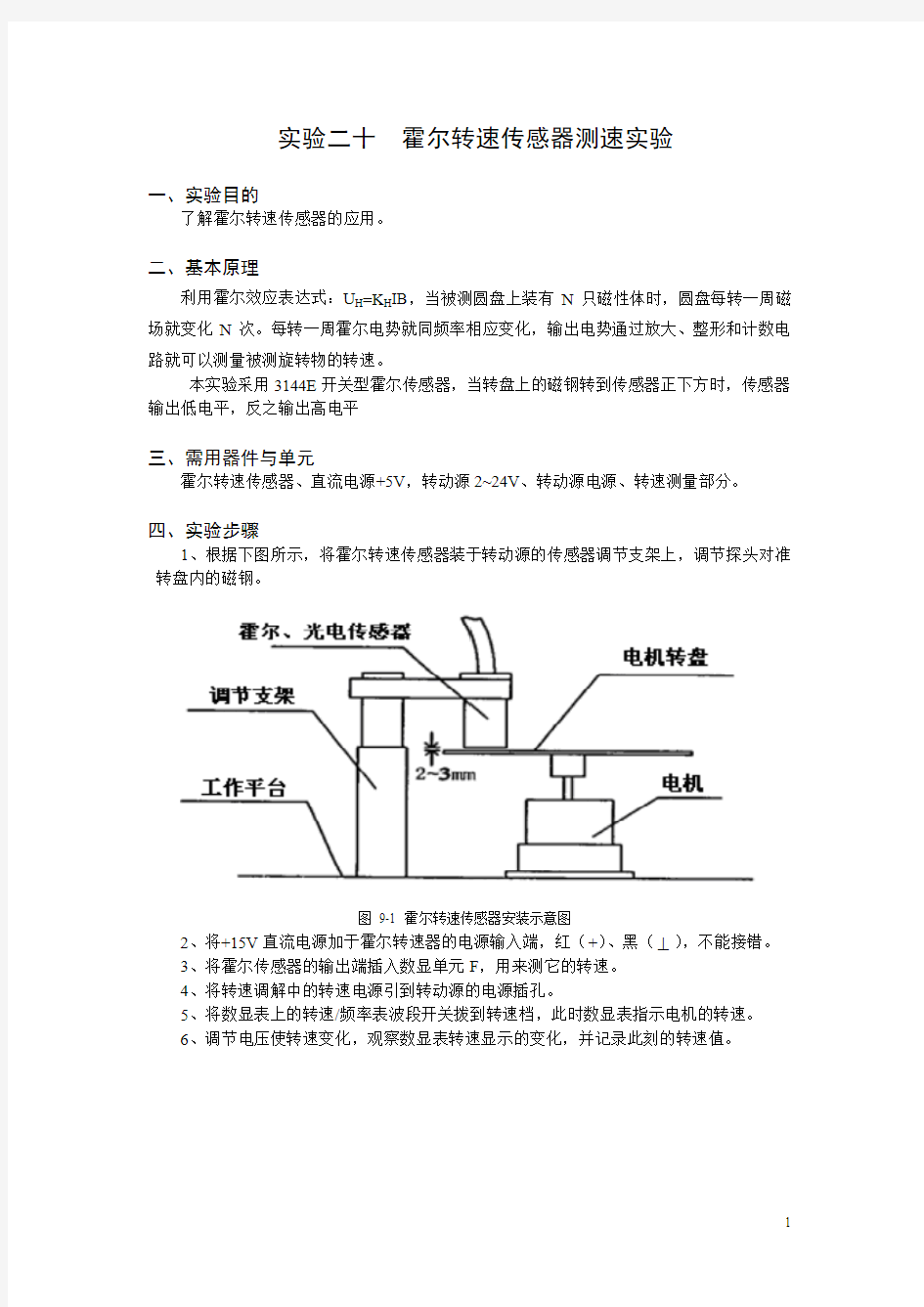
1、根据下图所示,将霍尔转速传感器装于转动源的传感器调节支架上,调节探头对准转盘内的磁钢。
图9-1 霍尔转速传感器安装示意图
2、将+15V直流电源加于霍尔转速器的电源输入端,红(+)、黑( ),不能接错。
3、将霍尔传感器的输出端插入数显单元F,用来测它的转速。
4、将转速调解中的转速电源引到转动源的电源插孔。
5、将数显表上的转速/频率表波段开关拨到转速档,此时数显表指示电机的转速。
6、调节电压使转速变化,观察数显表转速显示的变化,并记录此刻的转速值。
五、实验结果分析与处理
1、记录频率计输出频率数值如下表所示:
电压(V) 4 5 8 10 15 20 转速(转/分)0 544 930 1245 1810 2264 由以上数据可得:电压的值越大,电机的转速就越快。
六、思考题
1、利用霍尔元件测转速,在测量上是否有所限制?
答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误。
2、本实验装置上用了十二只磁钢,能否只用一只磁钢?
答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一些;如果霍尔
是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。
实验二十一 磁电式传感器转速测量实验
一、 实验目的:
了解磁电式测量转速的原理; 二、需用器件与单元:
磁电传感器、转动调节2-24V ,转动源单元。+5V 直流电源、数显转速/频率表。
三、基本原理:
磁电传感器是一种将被测物理量转换成为感应电势的有源传感器,也称为电动式传感器或感应式传感器。根据电磁感应定律,一个匝数为N的线圈在磁场中切割磁力线时,穿过线
圈的磁通量发生变化,线圈两端就会产生出感应电势,线圈中感应电势: 。线
圈感应电势的大小在线圈匝数一定的情况下与穿过该线圈的磁通变化率成正比。当传感器的线圈匝数和永久磁钢选定(即磁场强度已定)后,使穿过线圈的磁通发生变化的方法通常有两种:一种是让线圈和磁力线作相对运动,即利用线圈切割磁力线而使线圈产生感应电势;另一种则是把线圈和磁钢部固定,靠衔铁运动来改变磁路中的磁阻,从而改变通过线圈的磁通。因此,磁电式传感器可分成两大类型:动磁式及可动衔铁式(即可变磁阻式)。本实验应用动磁式磁电传感器,实验原理框图如图所示。当转动盘上嵌入6个磁钢时,转动盘每转一周磁电传感器感应电势e 产生6次的变化,感应电势e 通过放大、整形由频率表显示f,转速
n =10f 。
磁电传感器测转速实验原理框图
四、实验步骤:
1、观察原理图。
(1)磁电式转速传感器按下图安装:
传感器端面离转动盘面2mm 左右,并且对准反射面内的磁钢。将磁电式传感器输出端插入数显单元Fi 孔。
dt d N e Φ
-=
(2)将波段开关选择转速测量档.
(3)将转速调节电源2-24V用引线引入到台面板上转动源单元中转动电源2-24V插孔,
合上主控箱电源开关。使转速电机带动转盘旋转,逐步增加电源电压观察转速变化情况。
(5)调节电压值并记录数显值,测量结果如下表:
电压(v) 2 3 4 5 6 7 8 9 10 转速(转/分)0 0 0 454 683 875 1030 1170 1295 电压(v)11 12 13 14 15 16 17 18 20 转速(转/分)1400 1535 1635 1705 1780 1865 1960 2040 2222 五、思考题:
为什么说磁电式转速传感器不能测很低速的转动,能说明理由吗?
答:因为磁电式转速传感器是利用旋转体改变磁路,使磁通量发生变化,从而使其线
圈产生感应电压,如果转速很慢,旋转体改变磁路也很慢,磁通量的变化也会变慢,此时所
感应出的电压就会很小,就无发正确的测定转速。
实验三十一光纤传感器测速实验
一、实验目的:
了解光线式传感器的原理和使用
二、需用器件与单元:
光纤传感器、光纤传感器实验模块、转动调节2-24V,转动源单元、+5V直流电源、数显转速/频率表
三、基本原理:
利用光线位移传感器探头对旋转体电机被测反射光的明显变化而产生的电脉冲,经后级电路处理,放大整形等即可测量出电机的转速。
四、实验步骤:
1、光纤传感器按图接于支架上,使光纤探头与电机转盘平台中磁钢反射点对准,保持在2—3mm之间。
2、按“光纤位移特性试验”的连线图,将光纤传感器实验模块输出Vo1与数显电压表Vi 端相接,接上实验模块上电源,数显表的切换开关拨到20V档
(1)用手转动圆盘,使探头避开反射面(暗电流),和尚主控箱电源开关,调节Rw2使数显表显示接近零,此时Rw1处于中间位置。
(2)在用手转动圆盘,是光纤探头对准反射点,调节升降支架高低,使数显表指示最大,重复(1)(2)步骤,直至两者的电压差至最大,再将Vo1与转速/频率数显表Fi输入端相接,数显表的波段开关拨到转速档。
3、将转速调节2-24V,接入转动电源24V插孔上,使电动机转动,逐渐加大点击的电源电压,使电动机转速变化,观察并记录下数显表上的转速。
4、固定转速电压不变,将选择开关拨到频率测量档,测量频率,记下频率读数,根据转盘上的测量点数折算成转速值n2。
5、将实验步骤4比较,以n1作为真值计算两种方法的测速误差(相对误差),相对误差r=(n1-n2)/n1*100%。
6、接线图如图所示:
(7)结果如图所示
电压(v) 2 3 4 5 6 7 8 9 10 转速(转/分)0 0 314 531 710 890 1055 1190 1320 电压(v)11 12 13 14 15 16 17 18 19
转速(转/分)1445 1565 1640 1735 1805 1890 1980 2000 2135
实验三十二光电式传感器转速测量
一、实验目的:
了解光电转速传感器测量转速的原理及方法。
二、需用器件与单元:
光电转速传感器、转动调节2-24V,转动源单元。+5V直流电源、数显转速/频率表。
三、基本原理:
光电式转速传感器有反射型和透射型二种,本实验装置是透射型的,传感器端部有发光管和光电池,发光管发出的光源通过转盘上的孔透射到光电管上,并转换成电信号,由于转盘上有等间距的6个透射孔,转动时将获得与转速及透射孔数有关的脉冲,将电脉计数处理即可得到转速值。转盘每转一周输出N个脉冲信号,计数器可以测出脉冲信号的频率(Hz),可按n=f*60/N计算转速。
四、实验内容与步骤
1、光电转速传感器安装如下图所示,在传感器支持架上装上光电转速传感器,使传器端面离平台表面2-3mm,将传感器引线分别插入相应插孔,其中红色接入直流电源+5V,黑色为接地端,蓝色输入主控箱F i 。转速/频率表置“转速”档。
2、将转速调节2-24V接到转动源2-24V插孔上。
3、将光电传感器实验端子与数显电压表Vi端相接,数显表的切换开关选择开关拨到20V
档,(1)用手转动圆盘,使探头避开反射面(暗电流),和尚主控箱电源开关,调节Rw2使数显表显示接近零,此时Rw1处于中间位置。(2)在用手转动圆盘,是光纤探头对准反射点,调节升降支架高低,使数显表指示最大,重复(1)(2)步骤,直至两者的电压差至最大,再将Vo1与转速/频率数显表Fi输入端相接,数显表的波段开关拨到转速档。合上主控箱电源开关,使电机转动并从转速/频率表上观察电机转速。如显示转速不稳定,可调节传感器的安装高度。
4、接线图如图所示:
5.测量结果如图表所示
电压(v) 2 3 4 5 6 7 8 9 10 转速(转/分)0 0 345 540 760 935 1115 1280 1410 电压(v)11 12 13 14 15 16 17 18 19 转速(转/分)1540 1650 1740 1840 1925 1965 2035 2105 2180
五、实验小结:
通过本次试验,我们了解了霍尔式传感器、磁电式传感器、光纤式传感器和光电式传感器的实验原理和它们之间的区别,并知道如何去使用它,意识到了团队合作的重要性,加强
了自己对电子测量这门学科更深一步的了解。
课程设计实验报告-直流电机测速 (1)
直流电机测速 摘要 设计一种直流电机调速系统,以STC89C52 为控制核心,通过ULN2003 驱动电机,使用ST151 测量转速,实现了按键输入、电机驱动、转速控制、转速显示等功能。 关键词:直流电机, 80C51, ULN2003, 转速控制
第一章题目描述直流小电机调速系统: 采用单片机、ul n2003 为主要器件,设计直流电机调速系统,实现电机速度开环可调。 要求:1、电机速度分30r /m、60r /m、100r /m共3 档;2、通过按选择速度; 3、检测并显示各档速度。所需器件: 实验板(中号)、直流电机、STC89C52、电容(30pFⅹ2、10uF ⅹ2)、数码管(共阳、四位一体)、晶振(12M H z )、小按键(4 个)、ST151、电阻、发光二极管等。 第二章方案论述按照题给要求,我们最终设计了如下的解决方案:用户通过 键盘键入控制指令(开关),微控制器在收到指令 后改变输出的 PW M波,最终在 U LN2003 的驱动下电机转速发生改
变。通过 ST151 传感器测量电机扇叶的旋转情况,将转速显示在数码管上。 在程序主循环中实现按键扫描与转速显示,将定时器0 作为计数器,计数ST151 产生的下降沿,可算出转速,并送至数码管显示。 第三章硬件部分 设计 系统硬件部分包含输入模块、显示模块、控制模块、测速模块等。在硬件搭建前,先通过Pr ot eus Pr o 7. 5 进行硬件仿真实现。 1. 时钟电路 系统采用12M 晶振与两个30pF 电容组成震荡电路,接STC89C52 的 XTAL1 与 XTAL2 引脚,为微控制器提供时钟源 2. 按键电路
测速测频实验
课程综合实验总结报告(中文题目,黑体三号) (XXXXXXXXXX) 院系:XXXXXXX 专业:XXXXX 姓名:XX 学号:XXXXXXXX 1.实验名称:测速测频仪设计实验 2.实验内容与要求 (1)通过NE555电路产生基本的脉冲信号,并在数码管上显示脉冲频率。 15% (2)调节电路中的电位器,改变脉冲信号的频率,当测量的脉冲达到最大 频率或最小频率(最大频率、最小频率可通过键盘进行设置)时,蜂鸣 器给出报警声音。15% (3)通过键盘模块,输入所需NE555产生脉冲的频率,在LCD屏上显示相 应的操作界面,并提示电位器应调节的位置,利用单片机的计数器功能,实时测量频率信号,显示在LCD屏上,并根据测量结果与设定值的差异,给出电位器应调节的趋势。30% (4)使用直流电机,设计一简易的汽车速度测量系统,可实时在LCD上显 示汽车的速度曲线及当前速度值,电机转速由NE555的脉冲频率控制(两 者正比,比例系数自定义),当车速高于1200rpm时产生超速报警指示 (在LCD屏上闪烁)。直流电机的测速装置需个人根据提供的码盘和槽 型光耦在实验板上自主搭建。40% 3.总体结构和硬件设计 2.1 实验使用到的硬件模块与组成框图 实验用到的硬件模块有:mcu为STC90C516RD+单片机控制模块,NE555 脉冲发生器,矩阵键盘,数码管显示,蜂鸣器,直流电机及其驱动模块,LCD显示模块等。其组成框图如下:
图1 硬件模块组成框图 2.2 相关硬件模块的功能和作用 (1)mcu控制模块:对外部模块其控制作用以及对数据进行处理。 (2)矩阵键盘:mcu通过读取其键值对其他模块进行控制,这是一个外部 控制信号输入模块。 (3)数码管:静态或动态显示数字或部分字母。 (4)NE555脉冲发生器:脉冲信号发生模块,通过调节可变电阻器可调节 脉冲频率以及小幅调整占空比。 (5)蜂鸣器:在一定频率脉冲控制下可以鸣响,这里作为警报信号。 (6)直流电机驱动:输入PWM波,输出一定功率的频率、占空比不变的 脉冲驱动直流电机匀速转动。这里为了获得占空比可调且调节范围大的PWM波,是用mcu内部产生方波信号的,由于驱动能力不足,所以用ULN2003A芯片进行功率放大以驱动直流电机。 (7)LCD显示:实现显示汉字、字母、数字的显示,以及画图功能。4.软件流程和模块设计 4.1程序流程
传感器测速实验报告(第一组)
传感器测速实验报告 院系: 班级: 、 小组: 组员: 日期:2013年4月20日
实验二十霍尔转速传感器测速实验 一、实验目的 了解霍尔转速传感器的应用。 二、基本原理 利用霍尔效应表达式:U H=K H IB,当被测圆盘上装有N只磁性体时,圆盘每转一周磁场就变化N次。每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 本实验采用3144E开关型霍尔传感器,当转盘上的磁钢转到传感器正下方时,传感器输出低电平,反之输出高电平 三、需用器件与单元 霍尔转速传感器、直流电源+5V,转动源2~24V、转动源电源、转速测量部分。 四、实验步骤 1、根据下图所示,将霍尔转速传感器装于转动源的传感器调节支架上,调节探头对准转盘内的磁钢。 图 9-1 霍尔转速传感器安装示意图 2、将+15V直流电源加于霍尔转速器的电源输入端,红(+)、黑( ),不能接错。 3、将霍尔传感器的输出端插入数显单元F,用来测它的转速。 4、将转速调解中的转速电源引到转动源的电源插孔。 5、将数显表上的转速/频率表波段开关拨到转速档,此时数显表指示电机的转速。 6、调节电压使转速变化,观察数显表转速显示的变化,并记录此刻的转速值。
五、实验结果分析与处理 1、记录频率计输出频率数值如下表所示: 电压(V) 4 5 8 10 15 20 转速(转/分)0 544 930 1245 1810 2264 由以上数据可得:电压的值越大,电机的转速就越快。 六、思考题 1、利用霍尔元件测转速,在测量上是否有所限制? 答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误。 2、本实验装置上用了十二只磁钢,能否只用一只磁钢? 答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一些;如果霍尔是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。
北京工业大学大二下直流电机测速实验报告
北京工业大学 课程设计报告 学院:___电控学院___专业:_电子科学与技术__班级:_120231_组号_16_ 题目:1_直流电机测速___2_小型温度控制系统_姓名:__王宁______学号:__12023110____ 指导教师:___杨旭东__成绩___________
目录 一、前言﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍3 (一)设计题目﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍3(二)课题背景 (3) 二、设计要求 (3) (一)设计任务 (3) (二)设计框架图 (4) (三)参考元器件﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍4 (四)设计要求 (4) 1、电源模块 (4) 2、信号处理模块 (4) 3、功率放大模块 (4) (五)发挥部分 (5) 三、设计原理 (5) (一)设计原理说明 (5) (二)电源模块 (5) 1、方案选择 (5) 2、原理分析 (6) (三)变送器模块 (9) 1、方案选择............................................................................................... - 9 - 2、原理分析 (10) (四)驱动器 (11) 1、方案选择 (11) 2、原理分析 (11) 四、系统调试及实物图 (11)
(一)调试顺序说明 (11) (二)电源模块调试 (11) (三)变送器模块调试 (12) (四)驱动器模块调试 (12) 五、实物图﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍13 六、实验中问题分析及解决 (14) (一)稳压电源电路板 (14) (二)变送器电路板 (14) (三)驱动电路板 (15) 七、数据与误差分析 (15) (一)稳压电源电路板 (15) (二)变送器电路板 (16) (三)驱动器模块电路板 (16) 八、附录 (17) (一)系统电路的工作原理图 (17) (二)元器件识别方法和检测方法 (17) (三)参考资料 (18) 九、心得体会 (19)
上海交大运动控制直流无刷电机实验报告
直流无刷电机实验报告 一、硬件电路原理简述 1、总体硬件电路图 图总体硬件电路原理图 单片机通过霍尔传感器获得转子的位置,并以此为依据控制PWM波的通断。
2、霍尔元件测量值与PWM波通断的关系 图霍尔元件测量值与PWM波通断的关系 二、软件架构 1、Components与变量定义 图 Components列表 PWMMC是用来产生控制电机的PWM波的。添加PWMMC时会同时加入一个eFlexPWM。
PWM_Out对应的是GPIO B2口,这个口电位为高时,电压才会被加到电机上。 GPIO B3控制着一个继电器,用于防止启动时过大的冲击电流。程序开始后不久就应把B3置高。 Halla、Hallb、Hallc对应于3个霍尔传感器。依次为GPIOC3、C4、C6。 TimerInt是用于测速的。根据2次霍尔元件的中断间的时间间隔来计算转速。 2、电机旋转控制代码 for(;;) { Hall_Sensor = 0b00000000; Halla = Halla_GetVal(); Hallb = Hallb_GetVal(); Hallc = Hallc_GetVal(); if(Halla) Hall_Sensor |= 0b00000100; if(Hallb) Hall_Sensor |= 0b00000010; if(Hallc)
Hall_Sensor |= 0b00000001; switch(Hall_Sensor) { case 0b0000011: PESL(eFPWM1_DEVICE, PWM_OUTPUT_A, PWM_SM1_ENABLE); PESL(eFPWM1_DEVICE, PWM_OUTPUT_B, PWM_SM2_ENABLE); break; case 0b0000001: PESL(eFPWM1_DEVICE, PWM_OUTPUT_A, PWM_SM1_ENABLE); PESL(eFPWM1_DEVICE, PWM_OUTPUT_B, PWM_SM0_ENABLE); break; case 0b0000101: PESL(eFPWM1_DEVICE, PWM_OUTPUT_A, PWM_SM2_ENABLE); PESL(eFPWM1_DEVICE, PWM_OUTPUT_B, PWM_SM0_ENABLE); break;
皮托管测速实验
毕托托管测速实验 一、实验目的 1、通过对风洞中圆柱尾迹和来流速度剖面的测量,掌握用毕托管测量点流速的技能; 2、了解毕托管的构造和适用性,掌握利用数字式精密微压计,对风速进行静态快速测量; 3、利用动量定理计算圆柱阻力。 二、实验原理及装置 ①数字式微压计 ②毕托管 图1 电动压力扫描阀 毕托管又叫皮托管,是实验室内量测时均点流速常用的仪器。这种仪器是1730年由享利·毕托(Henri Pitot )所首创。 ()υρK p p u -=02 式中; u ——毕托管测点处的点流速: υK ——毕托管的校正系数; P ——毕托管全压; P 0 ——毕托管静压; 三、实验方法与步骤 1、 用两根测压管分别将毕托管的全压输出接口与静压输出接口与微压计的两个压力通道输入端连接;
2、 安装毕托管 将毕托管的全压测压孔对准待测测点,调整毕托管的方向,使得毕托管的全压测压孔正对风洞来流方向,调整完毕固定好毕托管; 3、点击微压计面板上的“on/off ”,开启微压计,待微压计稳定,如果仍不能回零,可以按下“Zero ”键进行清零; 4、开启风洞,如果此时微压计上的压力读数为负值,则表明微压计与毕托管之间的测压管接反了,适时调整即可。 5、开始测量,读数稳定后,可记录读数。 四、数据处理与分析 原始数据: 频率/Hz 2.0 3.0 4.0 5.0 6.0 7.0 8.0 9.0 10.0 风速/m/s 1.8 3.2 4.5 5.8 7.0 8.3 9.6 10.8 12.8 压力/pa 2.0 6.1 12.1 20.2 29.7 41.0 54.8 70.0 86.9 取标准大气压: 通过绘图得到皮托管风速与风机频率的曲线图:由图可见两者呈线性关系 240,0.1219125./01.3P Pa kg k s m ρ==
测速传感器的测速及控制)
成绩评定: 传感器技术 课程设计 题目测速传感器的测速及控制
摘要 汽车车速传感器检测系统设计是一种传感器检测装置。利用车速传感器把检测到的转速信号转变成的电压信号输送给计算机,计算机通过变频器来控制电机速度,利用传感器检测的速度值与规定值进行比较,达到对传感器的检测目的。 本文介绍了车速传感器检测系统的工作原理,详细讲述了系统的组成、原理和检测方法。系统采用硬件兼软件对测量过程及测量结果进行处理。与传统的检测技术相比,此种传感器检测装置有结构简单、新颖、易于实现的特点。实践证明在检测,维修范围内都取得了良好的效果,系统具有良好的稳态精度及动态响应性能,检测实用性强、准确度高,具有广阔的应用前景。。 关键词:数据采集;控制装置;传感器,
目录 一、设计目的------------------------- 1 二、设计任务与要求--------------------- 1 2.1设计任务------------------------- 1 2.2设计要求------------------------- 1 三、设计步骤及原理分析 ----------------- 2 3.1设计方法------------------------- 2 3.2设计步骤------------------------- 3 3.3设计原理分析---------------------- 4 四、课程设计小结与体会 ----------------- 5 五、参考文献-------------------------- 6
一、设计目的 随着电子技术的发展,汽车电子化程度不断提高,通常的机械系统已经难以解决某些与汽车功能要求有关的问题,而被电子控制系统代替。传感器的作用就是根据规定的被测量的大小,定量提供有用的电输出信号的部件,亦即传感器把光、时间、电、温度、压力及气体等的物理、化学量转换成信号的变换器。传感器作为汽车电控系统的关键部件,它直接影响汽车的技术性能的发挥。 二、设计任务与要求 2.1设计任务 作为现代信息技术三大支柱之一的传感器技术,已成为21世纪人们在高新技术发展方面争夺的一个制高点。在现代汽车电子控制中,传感器广泛用于发动机控制系统、底盘控制系统、车身控制系统和导航系统中,传感器的使用数量和技术水平决定了现代车辆控制系统的性能,为汽车性能的改善提供了有力保障。传感器是汽车电子控制系统的信息源,是促进汽车高档化、电子化、自动化的关键部件,也是汽车电子技术领域研究的核心内容之一。普通汽车上大约装有10-20只传感器,高级豪华轿车则更多。传感器能及时识别外界和系统本身的变化,对温度、压力、位置、转速、体积流量等信息进行实时、准确的测量,并将信息传递给电脑进行处理,从而实现汽车各系统的电子控制。现代社会对车辆性能的要求越来越高,促使汽车传感器技术不断发展,今后汽车传感器的发展趋势是实现微型化、智能化和多功能化,开发新材料、新工艺和新型传感器。 2.2设计要求 随着现代电子技术的发展,车辆电子化的程度越来越高,车辆传感器成为汽车电子控制系统的重要组成部件,也是车辆电子技术领域研究的核心技术之一。车辆内传感器的工作环境十分恶劣,因此对传感器的要求也十分严格。这些传感器必须要经受40℃~150℃的温度变化,而且要求精度高、可靠性好、反应快、抗干扰和抗振动能力强,才能准确地实时检测车辆运行的有关状 1
光纤位移传感器静态动态实验
光纤位移传感器静态和动态实验 【教学目的】 1.了解光纤传输的基本原理。 2.了解反射式光纤传感器的原理、结构、性能。 3.学习用光纤传感器进行相关物理量的测量。 【教学重点】 1.反射式光纤位移传感器的结构与工作原理。 2.反射式光纤传感器的输出特性曲线。 【教学内容】 光纤传感器是以光学技术为基础,将被敏感的状态以光信号形式取出。光信号不仅人能直接感知,而且,利用半导体二极管诸如光电二极管、雪崩光电二极管、发光二极管之类的小型而简单的元件很容易进行光电、电光转换,所以易与高度发展的电子装置匹配,这是光纤传感器的突出优点。此外,由于光纤不仅是敏感元件而且也是一种优良的低损耗传输线,因此不必考虑测量仪器和被测物体的相对位置,从而特别适用于电子传感器等不太适用的地方。 与其它机械量相比,位移是既容易检测又容易获得高精度的检测量,所以测量中常采用将被测对象的机械量转换成位移来检测的方法。例如将压力转换成膜的位移,将加速度转换成重物位移等;而且这种方法结构简单,所以位移传感器是机械量传感器中的基本传感器。光纤位移传感器有强度型和干涉型两大类,本实验所用传感器为反射式强度型光纤传感器。反射式强度型光纤传感器具有原理简单、设计灵活、价格低廉等特点,并已在许多物理量(如位移、压力、振动、表面粗糙度等)的测量中获得成功应用。这种位移传感器在小的测量范围内能进行高速位移测量,它具有非接触、探头小、频响高、线性度好等特点。 一、实验原理 1)光导纤维与光纤传感器的一般原理 图1光纤的基本结构
光导纤维是利用光的完全内反射原理传输光波的一种介质。如图1所示,它是由高折射率的纤芯和包层所组成。包层的折射率小于纤芯的折射率,直径大致为0.1mm~0.2mm。当光线通过端面透入纤芯,在到达与包层的交界面时,由于光线的完全内反射,光线反射回纤芯层。这样经过不断的反射,光线就能沿着纤芯向前传播。 由于外界因素(如温度、压力、电场、磁场、振动等)对光纤的作用,引起光波特性参量(如振幅、相位、偏振态等)发生变化。因此人们只要测出这些参量随外界因素的变化关系,就可以通过光特性参量的变化来检测外界因素的变化,这就是光纤传感器的基本工作原理。 2)反射式位移传感器的结构原理 反射式光纤位移传感器是一种传输型光纤传感器。其原理如图2所示:光纤采用Y型结构,两束光纤一端合并在一起组成光纤探头,另一端分为两支,分别作为光源光纤和接收光纤。光从光源耦合到光源光纤,通过光纤传输,射向反射片,再被反射到接收光纤,最后由光电转换器接收,转换器接受到的光源与反射体表面性质、反射体到光纤探头距离有关。当反射表面位置确定后,接收到的反射光光强随光纤探头到反射体的距离的变化而变化。显然,当光纤探头紧贴反射片时,接收器接收到的光强为零。随着光纤探头离反射面距离的增加,接收到的光强逐渐增加,到达最大值点后又随两者的距离增加而减小。图3所示就是反射式光纤位移传感器的输出特性曲线,利用这条特性曲线可以通过对光强的检测得到位移量。反射式光纤位移传感器是一种非接触式测量,具有探头小,响应速度快,测量线性化(在小位移范围内)等优点,可在小位移范围内进行高速位移检测。 图2反射式位移传感器原理 图3反射式光纤位移传感器的输出特性
测速传感器模块
测速传感器模块 用途: 广泛用于电机转速检测,脉冲计数,位置限位等。 模块特色: 1、使用进口槽型光耦传感器 2、槽宽度5mm。 3、有输出状态指示灯,输出高电平灯灭,输出低电平灯亮。 4、有遮挡,输出高电平;无遮挡,输出低电平。 5、比较器输出,信号干净,波形好,驱动能力强,超过15mA。 6、工作电压3.3V-5V 7、输出形式:数字开关量输出(0和1) 8、设有固定螺栓孔,方便安装 9、小板PCB尺寸:3.2cm x 1.4cm 10、使用宽电压LM393比较器 模块使用说明: 1.模块槽中无遮挡时,接收管导通,模块DO输出低电平,遮挡时,DO 输出高电平; 2.模块DO可与继电器相连,组成限位开关等功能,也可以与有源蜂鸣器模块相连,组成报警器。 发货清单: 测速传感器模块1个 电路图
热敏传感器模块 用途: 温度检测,温度控制传感器,环境温度检测 模块特色: 1、采用NTC热敏电阻传感器,灵敏度好 2、比较器输出,信号干净,波形好,驱动能力强,超过15mA。 3、配电位器调节温度检测阀值 4、工作电压3.3V-5V 5、输出形式:数字开关量输出(0和1)
6、设有固定螺栓孔,方便安装 7、小板PCB尺寸:3.2cm x 1.4cm 8、使用宽电压LM393比较器 模块使用说明 1、热敏电阻模块对环境温度很敏感,一般用来检测周围环境的温度; 2、通过对电位器的调节,可以改变温度检测的阀值(即控制温度值),如需要控制环境温度为50度时,模块则在相应环境温度调到其绿灯亮,DO则输出高电平,低于此设定温度值时,输出高电平,绿灯不亮; 3、DO输出端可以与单片机直接相连,通过单片机来检测高低电平,由此来检测环境的温度改变; 4、DO输出端可以直接驱动本店继电器模块,由此可以组成一个温控开关,控制相关设备的工作温度,也可以接风扇用来散热等; 5、本模块的温度检测范围为20-80摄氏度; 6、本模块也可以换成带有线的温度传感器,用于水温,水箱等的控制。
直流电机转速测量系统的设计
一、概述 该课程设计是关于直流电动机转速的测量。转速是电动机极为重要的一个状态参数,一般是指电机转子的每分钟转数,通常用r/min 表示。本次课程设计选用光电测速法,测量电路由光电转换电路,整形电路,晶体振荡电路,分频电路,倍频电路,时序控制电路和计数、译码、驱动、显示电路构成,电机转速的测量范围为600r/min~30000r/min ,测量的相对误差 1%,并用5位LED 数码管显示出相应的电机转速。 本次课设需满足以下设计要求: 1根据技术指标,设计各部分电路并确定元器件参数; 2.用5位LED 数码管显示出相应的电机转速; 3.画出电路原理图(元器件标准化,电路图要规范化)。 二、方案论证 本课程设计是设计电机转速测量系统,采用光电测速方案,将转速信号转化为脉冲信号,然后用数字系统内部的时钟来对脉冲信号的频率进行测量,方案中包括光电转换电路,整形电路,闸门电路,晶体振荡电路,分频电路,倍频电路,控制电路和计数、译码、驱动、显示电路。原理方框图如图1所示: 在电动机转轴上安装一个圆盘,在圆盘上打6个均匀小孔。当电动机旋转时光源通过小孔投射到光敏三极管上,就产生了一序列的脉冲信号,光敏三极管产生的脉冲信号频率与电机转速成正比。脉冲信号经过整形电路转变成方波,再用二倍频电路使整形后的信号频率变为原来的二倍。再由晶体振荡电路输出的信号经过215分频电路, 光电转换电路 整 形 电 路 闸 门 电 路 计数、译码、驱动、显示 电路 输入 信号 晶体振荡器 电路 分 频 电 路 控 制 电 路 图1 电机转速测量系统原理框图
产生1Hz的基准信号,再经过10分频,便可产生一个0.1Hz的基准信号,该基准信号用来控制闸门电路,把经过倍频的光电转换后的信号计数并显示出来 三、电路设计 1.光电转换电路 在该部分可以用发光元件作为光的发射部分,可以选择发光二极管作发光元件,接收部分则要选择光敏三级管作为接受部件。其原理是用光敏三极管接收发光二极管通过小孔发射过来的光信号。在电机的转轴上安装上已打好6个均匀小孔的圆盘,让发光二极管与光敏三极管通过小孔相对,这样电机每转动一周,光线就会相应通过小孔6次,因为光电转换器受光一次就会产生一个脉冲,所以说电机在每转一周后就会相应的产生了6个脉冲。光电转换电路原理如图2所示: 图2 光电转换电路原理图 图中R1和R2为两个为350Ω限流电阻,LED持续发出的光被带孔圆盘间歇性阻断,变成间断的光信号,而光敏三极管将接收到的光信号转化成电信号,作用于之后的系统。 2.整形电路 整形电路用555定时器构成施密特触发器,利用施密特触发器,将输入的信号进行整形,输出为方波。2和6管脚连在一起接输入信号,从3管脚输出,输入信号与 输出信号反相,在5管脚接入10nF的滤波电容,当输入电压v i ﹤1/3Vcc时,v o 输出 为高电平,当输入电压v i ﹥2/3Vcc时,v o 输出为低电平。整形电路接法及输出波形如 图3和图4所示:
微机原理直流电机测速实验
实验四直流电机测速实验 一、实验目的: (1)掌握8254的工作原理和编程方法; (2)了解光电开关,掌握用光电传感测量电机转速的方法。 二、实验内容: 光电测速的基本电路由光电传感器,计数器/定时器组成。被测电机主轴上 固定一个圆盘,圆盘的边缘上有小孔。传感器的红外发射端和接收端装在圆盘的两侧,电机带动圆盘转到有孔的位置时,红外光通过,接收管导通,输出低电平。红外光被挡住时,接收截止,输出高电平。用计数器/定时器记录在一定时间内 传感器发出的脉冲个数,就可以计算出电机的转速。 三、线路连接: 线路连接如图4.5所示,8254计数器/定时器0和2作为定时器,确定测速时间,定时器0的CLK0连1MHZ脉冲频率,OUT0作为定时器2的输入,与CLK2 相连,输出OUT2与8255的PA0端相连。GATE0和GATE2均接+5V,8254计数器/ 定时器1作为计数器,输入CLK1与直流电机计数关连接,GATE1与8255的PC0相连。电机DJ端与+5V~0V模拟开关SW1相连。 四、编程提示: 8255计数器/定时器1作为计数器,记录脉冲个数,计数器/定时器0和2 作为定时器,组成10~60秒定时器,测量脉冲个数,算出电机每分钟的转速并显示在屏幕上。 8255的PA0根据OUT2的开始和结束时间,通过PC0向8254计数器/定时器1发出开始和停止计数信号。
五、流程图 如图4.6所示 图 4.6直流电机测速程序流程图 六,编写源程序如下: DATASEGMENT IOPORTEQU0D880H-0280H IO8255KEQUIOPORT+283H;8255控制口 IO8255AEQUIOPORT+280H;8255A口 IO8255CEQUIOPORT+282H;8255C口 IO8254KEQUIOPORT+28BH;8254控制 IO82542EQUIOPORT+28AH;8254计数器2 IO82541EQUIOPORT+289H;8254计数器1 IO82540EQUIOPORT+288H;8254计数器0 MESSDB'STRIKEANYKEY,RETURNTODOS!',0AH,0DH,'$' COUDB0
汽车测速传感器检测系统设计
汽车车速传感器检测系统设计 目前,随着人们生活水平的逐渐提高,人们对于生活质量的要求也日益增加,尤其是对生活质量舒适度的要求。汽车在中国普遍作为代步工具。而在国外,汽车却是一项十分受欢迎的交通方式。因此爱好汽车人十分学要一款能测速的装置,以知道自己的运行情况。并根据外界条件,如温度,风速等进行适当的调节,已达到最佳的运行效果。因此需要寻找一种装置与方法进行对训练中各种参数的测定记录。 本文讲详细的具体的讨论这些方法在汽车上的应用。 汽车要实现测速必须满足以下这些要求: ⒈对汽车进行实时速度的测量。显示出速度值。 ⒉能针对不同的车型进行选择。从而采用不同的模块进行测量。 ⒊能测量出当前的环境,以供使用者决定是否适宜出行。 ⒋显示当前日期时间,可以任意设定当前工作时间。 ⒌显示行车里程,运动时间。 ⒍可以自行设定采样频率 ⒎记录一段时间内的定时采样速度,存入制定单元。通过与PC机进行通讯,将数据传送到PC机中用如见进行处理,分析。得出运动或训练的情况。 8. 可以进入系统休眠方式以节省电能,并随时激活唤醒系统重新进行工作。可以调节液晶对比度,可以打开背景灯显示。
系统框图 通过传感器对外部物理量进行测量,再将物理信号转换为电信号,输入单 片机,单片机对所输入的电信号进行处理,最后输出显示,并可以通过与上位机通讯将数据采集到电脑中。 其中传感器元件用霍尔传感器,霍尔传感器外形图和与磁场的作用关系如右图所示。磁场由磁钢提供,所以霍尔传感器和磁钢需要配对使用。 霍尔传感器检测转速示意图如下。在非磁材料的圆盘边上粘贴一块磁钢,霍尔传感器固定在圆盘外缘附近。圆盘每转动一圈,霍尔传感器便输出一个脉冲。通过单片机测量产生脉冲的频率就可以得出圆盘的转速。 提醒:当没有信号产生时,可以改变一下磁钢的方向,霍尔对磁钢方向有要求。没有磁钢时输出高电平,有磁钢时输出低电平。 被测量对象 传感器 单片机系统 数据处理并显示 PC 机通信处理
直流电机测速器
机电学院 电子课程设计报告题目:直流电机测速器 专业班级:应用电子技术111 姓名: 时间:2013.12.9 ~2013.12.27 指导教师: 完成日期:2013年12月27日
直流电机测速器设计任务书 1.设计目的与要求 设计一个电动机测速器,要认真并准确地理解有关要求,独立完成系统设计,要求所设计的电路具有以下功能: (1)测量电动机六秒钟所转的圈数,显示电动机转速; (2)3个数码管显示电动机转速(转/分); (3)转速超出所测范围时,进行灯光报警。 2.设计内容 (1)画出电路原理图; (2)元器件及参数选择; (3)电路仿真; (4)搭接所设计的电路完成设计功能。 3.编写设计报告 写出设计的全过程,附上有关资料和图纸,有总结体会。 4.答辩 在规定时间内,完成叙述并回答问题。
目录 1引言 (1) 2 总体设计方案 (1) 2.1 设计思路 (1) 2.2 总体设计框图 (2) 3 设计原理分析 (2) 3.1 传感器电路 (2) 3.2 计数电路 (3) 3.3 显示电路 (5) 3.4 定时电路 (6) 3.5报警电路 (7) 3.6总体电路 (7) 3.7仿真电路 (8) 3.8调试图 (9) 4 总结与体会 (9) 参考文献 (10) 附录1 (11)
直流电机测速器 摘要:在工程实践中,经常会遇到各种需要测量转速的场合,测量转速的方法分为模拟式和数字式两种。模拟式采用测速发电机为检测元件,得到的信号是模拟量。数字式通常采用光电编码器,霍尔元件等为检测元件,得到的信号是脉冲信号。电机在运行过程中,需要对其进行监控,转速是一个必不可少的一个参数。本系统就是对电机转速进行测量,显示电机的转速,并观察电机运行的基本状况。本设计主要用霍尔传感器、LED数码显像管、555定时器、及74LS93组成的计数器构成。本文重点是测量速度并在3位LED数码管上显示电机六秒钟所转圈数,及超过预定值时经行的灯光报警。 关键词:霍尔元件,小直流电机,定时 1引言 在工程实践中,经常会遇到各种需要测量转速的场合, 例如在发动机、电动机、卷扬机、机床主轴等旋转设备的试验、运转和控制中,常需要分时或连续测量和显示其转速及瞬时转速。 目前国内外测量电机转速的方法很多,按照不同的理论方法,先后产生过模拟测速法(如离心式转速表、用电机转矩或者电机电枢电动势计算所得)、同步测速法(如机械式或闪光式频闪测速仪)以及计数测速法。计数测速法又可分为机械式定时计数法和电子式定时计数法。传统的电机转速检测多采用测速发电机或光电数字脉冲编码器,也有采用电容式(对高频振荡进行幅值调制或频率调制)等,还有一些特殊的测速器是利用置于旋转体内的放射性材料来发生脉冲信号。本文将介绍利用电磁式(利用电磁感应原理或可变磁阻的霍尔元件等)来获取脉冲信号经行测速。 2总体设计方案 2.1设计思路
速度测量实验
霍尔测速实验 一、实验目的:了解霍尔转速传感器的应用。 二、基本原理:利用霍尔效应表达式U H = K H IB ,当被测圆盘上装上N 只磁性 体时,圆盘每转一周,磁场就变化N 次,霍尔电势相应变化N 次,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速(转速=60*频率/12) 三、需用器件与单元:霍尔转速传感器、转速调节2-24V 、转动源单元、数显单元的转速显示部分。 四、实验步骤: 1、根据图5-4,将霍尔转速传感器装于传感器支架上,探头对准反射面的磁 钢。 2、将直流源加于霍尔元件电源输入端。红(+)接+5V ,黑(┴)接地。 3、将霍尔转速传感器输出端(蓝)插入数显单元F in 端。 4、将转速调节中的2-24V 转速电源引到转动源的2-24V 插孔。 5、将数显单元上的转速/频率表波段开关拨到转速档,此时数显表指示转速。 6、调节电压使转动速度变化。观察数显表转速显示的变化。 五、思考题: 1、利用霍尔元件测转速,在测量上是否有限制? 2、本实验装置上用了十二只磁钢,能否用一只磁钢,二者有什么区别呢? 图1霍尔、光电、磁电转速传感器安装示意图
实验三十一光纤传感器测速实验 一、实验目的:了解光纤位移传感器用于测量转速的方法。 二、基本原理:利用光纤位移传感器探头对旋转体被测物反射光的明显变化产生的电脉冲,经电路处理即可测量转速。 三、需用器件与单元:光纤传感器、光纤传感器实验模块、转速/频率数显表、直流源±15V、转速调节2~24V,转动源模块。 四、实验步骤: 1、光纤传感器按图1装于传感器支架上,使光纤探头与电机转盘平台中磁钢反射点对准。 2、按“光纤位移特性实验”的连线图,如图2所示,将光纤传感器实验模 块输出V o1与数显电压表V i 端相接,接上实验模块上±15V电源,数显表的切换 开关选择开关拨到20V档。①用手转动圆盘,使探头避开反射面(暗电流),合 上主控箱电源开关,调节Rw 2使数显表显示接近零(≥0),此时Rw 1 处于中间位 置。②再用手转动圆盘,使光纤探头对准反射点,调节升降支架高低,使数显表 指示最大,重复①、②步骤,直至两者的电压差值最大,再将V o1 与转速/频率数显表fi输入端相接,数显表的波段开关拨到转速档。 图2光纤传感器位移实验模块 3、将转速调节2-24V,接入转动电源24V插孔上,使电机转动,逐渐加大转速源电压。使电机转速盘加快转动,固定某一转速,观察并记下数显表上的读 数n 1 。 4、固定转速电压不变,将选择开关拨到频率测量档,测量频率,记下频率 读数,根据转盘上的测速点数折算成转速值n 2 (转速和频率的折算关系为:转速=频率*60/12)。 5、将实验步骤4与实验步骤3比较,以转速n 1 作为真值计算两种方法的测
自动化传感器实验报告十三 光电转速传感器测速实验
广东技术师范学院实验报告 学院:自动化专业:自动化班级: 08自动化 成绩: 姓名:学号: 组 别: 组员: 实验地点:实验日期:指导教师签名: 实验十二项目名称:光电转速传感器测速实验 一、实验目的 了解光电转速传感器测量转速的原理及方法。 二、基本原理 光电式转速转速传感器有反射型和透射型两种,本实验装置是透射型的,传感器端部有发光管和光电管,发光管发出的光源通过转盘上开的孔透射后由光电二极管接受转换成电 信号,由于转盘上有相间的6个孔,转动时将获得与转速及孔数有关的脉冲,将电脉冲计数 处理即可得到转速值。 三、需用器件与单元 光电转速传感器、直流电源5V、转动源及2~24V直流电源、智能转速表。 四、实验步骤 1.光电转速传感器已经安装在传感器实验箱(二)上。 2.将+5V直流源加于光电转速传感器的电源端。 3.将光电转速传感器的输出接到面板上的智能转速表。 4.将面板上的0~30V稳压电源调节到5 V,接入传感器实验箱(二)上的转动电源处。 5.调节转动源的输入电压,使转盘的速度发生变化,观察转速表上转速的变化。 电压(V) 5 6 7 8 9 10 11 12 频率 (HZ) 45 60 78 95 113 130 150 169 6.调节转动源的输入电压,使转盘的转速发生变化,把界面切换到示波器状态,观察传感器输出波形的变化。 电压越大,波形越窄。 五、注意事项 1.转动源的正负输入端不能接反,否则可能击穿电机里面的晶体管。 2.转动源的输入电压不可超过24V,否则容易烧毁电机。 3.转动源的输入电压不可低于2V,否则由于电机转矩不够大,不能带动转盘,长时间
传感器测转速的原理【详述】
传感器测转速的原理【详述】
作者: 日期:
内容来源网络,由“深圳机械展(1 1万m2,1100多家展商,超10万观众)”收集整理! 更多cn c加工中心、车铳磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数 字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就 在深圳机械展? 转速测量原理 转速的测量方法很多,根据脉冲计数来实现转速测量的方法主要有M法(测频法卜T法(测周期法)和M PT法(频率周期法),该系统采用了M法(测频法)。由于转速是以单位时间内转数来衡量,在变换过程中多数是有规律的重复运动。根据霍尔效应原理,将一块永久磁钢 固定在电机转轴上的转盘边沿,转盘随测轴旋转,磁钢也将跟着同步旋转,在转盘下方安装 一个霍尔器件,转盘随轴旋转时,受磁钢所产生的磁场的影响,霍尔器件输出脉冲信号,其频率和转速成正比。脉冲信号的周期与电机的转速有以下关系: 閒 11 ?—- FT, 霍尔传感器如何测转速—霍尔传感器测转速原理 式中:n为电机转速;P为电机转一圈的脉冲数;T为输出方波信号周期根据公式即可计 算出直流电机的转速。 测量电机转速的第一步就是要将电机的转速表示为单片机可以识别的脉冲信号,从而进 行脉冲计数。霍尔器件作为一种转速测量系统的传感器,它有结构牢固、体积小、重量轻、 寿命长、安装方便等优点,因此选用霍尔传感器检测脉冲信号,其基本的测量原理如图所示
当电机转动时,带动传感器运动,产生对应频率的脉冲信号,经过信号处理后输出到计数器或 其他的脉冲计数装置,进行转速的测量。 低号址理 霍尔传感器如何测转速_霍尔传感器测转速原理 霍尔传感器测转速方案 霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生横向电位差的物理现象。当电流通过金属箔片时,若在垂直于电流的方向施加磁场,则金属箔片两侧面会出现横向电位差。利用霍尔效应可以设计制成多种传感器。霍尔电位差UH的基本关系为: U H=K H IB K H=l/nq (金属) 霍尔传感器如何测转速—霍尔传感器测转速原理
单片机直流电机测速系统实训报告
单片机综合实训报告 专业:详详细细 姓名:xxxxx 学号:小行星 联系方式:详详细细 指导教师:粗粗糙糙 时间:2013年6月14日—6月28日
摘要 在电气时代的今天,电机在工农业生产与人们日常生活中都起着十分重要的作用。直流电机作为最常见的一种电机,具有非常优秀的线性机械特性、较宽的调速范围、良好的起动性以及简单的控制电路等优点,因此在社会的各个领域中都得到了十分广泛的应用。 随着单片机技术的日新月异,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。采用单片机构成控制系统,可以节约人力资源和降低系统成本,从而有效的提高工作效率。 在工程实践中,经常会遇到各种需要测量转速的场合, 例如在发动机、电动机、卷扬机、机床主轴等旋转设备的试验、运转和控制中,常需要分时或连续测量和显示其转速及瞬时转速。要测速,首先要解决是采样问题。在使用模技术制作测速表时,常用测速发电机的方法,即将测速发电机的转轴与待测轴相连,测速发电机的电压高低反映了转速的高低。为了能精确地测量转速外,还要保证测量的实时性,要求能测得瞬时转速方法。因此转速的测试具有重要的意义。 本文介绍了一种基于AT89C51 单片机平台,采用光电传感器实施电机转速测量的方法,硬件系统包括脉冲信号产生、脉冲信号处理和显示模块,并采用C 语言编程,结果表明该方法具有简单、精度高、稳定性好的优点。介绍了该测速法的基本原理、实验步骤和软硬件设计 这次设计内容包含知识全面,对传感器测量发电机转速的不同的方法及原理设计有较多介绍,在测量系统中能学到关于测量转速的传感器采样问题,单片机部分的内容,显示部分等各个模块的通信和联调。全面了解单片机和信号放大的具体内容。进一步锻炼我们在信号采集,处理,显示发面的实际工作能力。 关键词 单片机AT89C51 直流电机转速测量光电传感器电机脉冲
自动检测课程——转速检测试验报告
实验一霍尔测速和光电测速实验 一、实验目的: 了解霍尔组件的应用——测量转速。 二、实验仪器: 光电传感器、霍尔传感器、+5V、+4、±6、±8、±10V直流电源、转动源、频率/转速表。 三、实验原理; 如图1,霍尔传感器和光电传感器已安装于传感器支架上,且霍尔组件正对着转盘上的磁钢。光电传感器正对着测速圆盘的通孔。 a霍尔测速 b 光电测速 图1 霍尔测速原理:利用霍尔效应表达式:U H=K H IB,当被测圆盘上装上N只磁性体时,转盘每转一周磁场变化N次,每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测出被测旋转物的转速。 光电测速原理:光电式转速传感器有反射型和透射型二种,本实验装置是透射型的,传感器端部有发光管和光电池,发光管发出的光源通过转盘上的孔透射到光电管上,并转换成电信号,由于转盘上有等间距的6个透射孔,转动时将获得与转速及透射孔数有关的脉冲,将电脉计数处理即可得到转速值。转盘每转一周输出N个脉冲信号,计数器可以测出脉冲信号的频率(Hz),可按n=f*60/N计算转速。 四、实验内容与步骤 霍尔测速步骤 1.将+5V电源接到三源板上“霍尔”输出的电源端,“霍尔”输出接到直流电压表。用手转动测速圆盘,观测输出电压与霍尔传感器相对测速圆盘位置的关系。 2.将“霍尔”输出接到频率/转速表(切换到测转速位置)。 3.打开实验台电源,选择不同电源+4V、+6V、+8V、+10V、12V(±6)、16V(±8)、20V(±10)、24V驱动转动源,可以观察到转动源转速的变化,待转速稳定后记录相应驱动电压下得到的转速值和频率值 4用示波器观测霍尔元件输出的脉冲波形,记录其频率,根据测速圆盘的结构,换算转速;将示波器测得的转速作为实际转速与转速表测得的转速对比,计算误差。
微机原理实验报告直流电机测速实验
本科实验报告 课程名称:微机原理及接口技术 课题项目:直流电机测速实验 专业班级:电科1201 学号:2012001610 学生姓名:王天宇 指导教师:任光龙 2015年 5 月24 日
直流电机测速实验 一、实验目的 1.掌握8254的工作原理和编程方法 2.了解光电开关,掌握光电传感器测速电机转速的方法。 二、实验内容 光电测速的基本电路有光电传感器、计数器/定时器组成。被测电机主轴上固定一个圆盘,圆盘的边缘上有小孔。传感器的红外线发射端和接收端装在圆盘的两侧,电机带动圆盘转到有孔的位置时,红外线光通过,接收管导通,输出低电平。红外线被挡住时,接收截止,输出高电平。用计数器/定时器记录在一定时间内传感器发出的脉冲个数,就可以计算车电机的转速, 三、线路连接 线路连接:8254计数器/定时器0和2作为定时器,确定测速时间,定时器0的CLK0连1MHZ脉冲频率,OUT0作为定时器2的输入,与CLK2相连,输出OUT2与8255的PA0端相连。GATE0和GATE2均接+5V,8354计数器/定时器1作为计数器,,输入CLK1与直流电机计数端连接,GATE1与8254的PC0相连。电机DJ端与+5V~0V模拟开关SW1相连。如下图所示。
四、编程提示 8254计数器/定时器1作为计数器记录脉冲个数,计数器/定时器0和2作为定时器,组成10~60秒定时器,测量脉冲个数,算出点击每分钟的转速并显示在屏幕上, 8255的PA0根据OUT2的开始和结束时间,通过PC0向8254计数器/定时器1发出开始和停止计数信号。 五、流程图
六、实验程序: DATA SEGMENT IOPORT EQU 0D880H-0280H IO8255K EQU IOPORT+283H IO8255A EQU IOPORT+280H IO8255C EQU IOPORT+282H IO8254K EQU IOPORT+28BH IO82542 EQU IOPORT+28AH IO82541 EQU IOPORT+289H IO82540 EQU IOPORT+288H MESS DB 'STRIKE ANY KEY,RETURN TO DOS!', 0AH, 0DH,'$' COU DB 0 COU1 DB 0 COUNT1 DB 0 COUNT2 DB 0 COUNT3 DB 0 COUNT4 DB 0 DATA ENDS CODE SEGMENT