南昌大学PLC实验报告讲解
实验一三相异步电动机接触器点动控制线路 (2)
实验二三相异步电动机的可逆运转控制 (4)
实验三通电延时型控制线路 (6)
实验四可编程控制器的基本指令编程练习 (8)
实验五喷泉的模拟控制 (10)
实验六交通灯的模拟控制 (13)
实验七液体混合的模拟控制 (16)
实验一 三相异步电动机接触器点动控制线路
一、概述
三相笼式异步电机由于结构简单、性价比高、维修方便等优点获得了广泛的应用。在工农业生产中,经常采用继电器接触控制系统对中小功率笼式异步电机进行点动控制,其控制线路大部分由继电器、接触器、按钮等有触头电器组成。
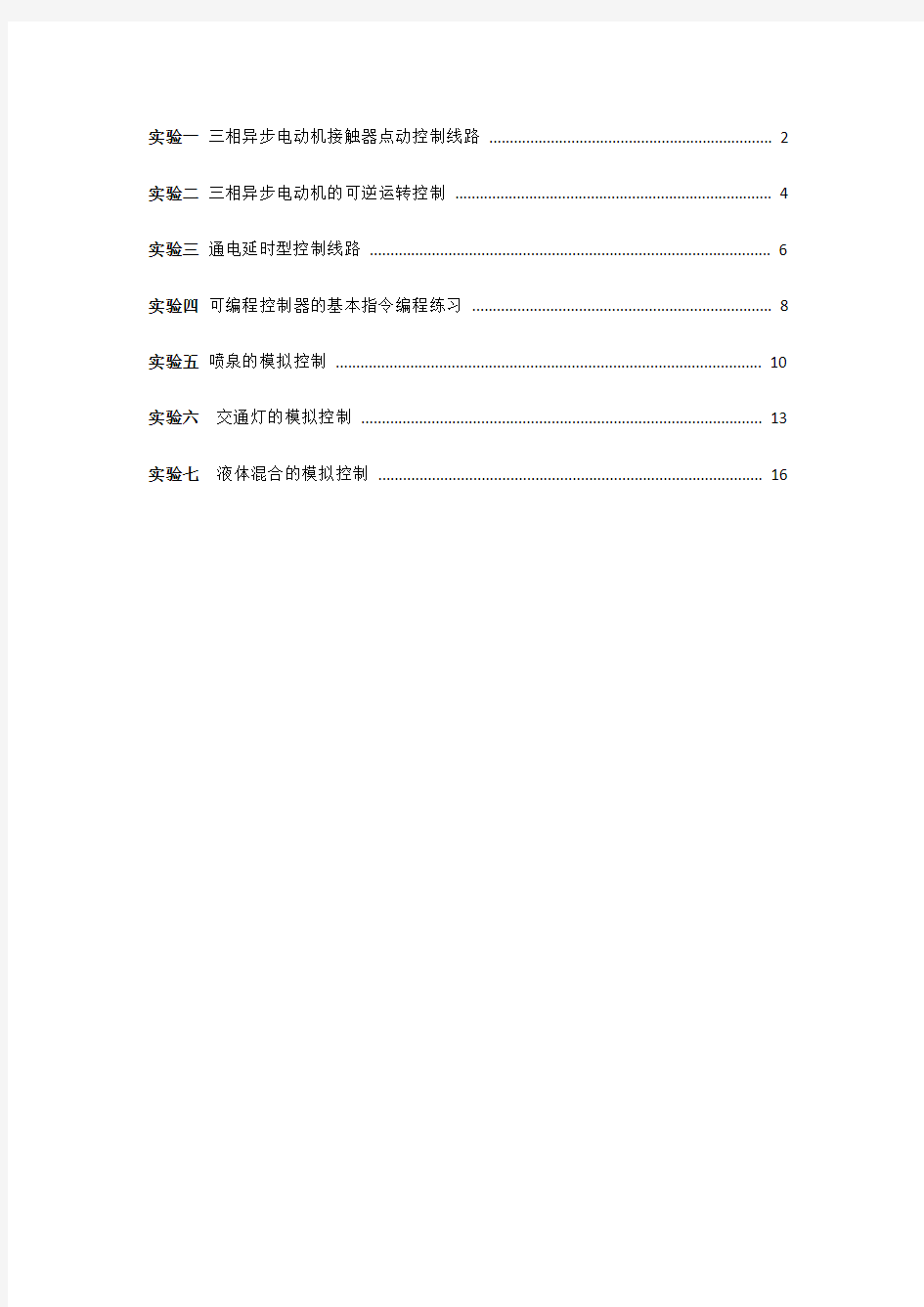
图2是三相鼠笼异步电动机接触器点动控制线路(电机为Y 接法)
起动时,合上漏电保护断路器及空气开关QF ,引入三相电源。按下起动按钮SB2时,交流接触器KM1的线圈通电,主触头KM1闭合,电动机接通电源起动。当手松开按钮时,接触器KM1断电释放,主触头KM1断开,电动机电源被切断而停止运转。
FR1
FU1KM1
QF L1
L2
L3
L
KM1
M 3~
FR1
N FU2
FU2
L SB1
SB2
二、实验目的
1、 了解时间继电器的结构,掌握其工作原理及使用方法。
2、 掌握Y-Δ起动的工作原理。
3、 熟悉实验线路的故障分析及排除故障的方法。
三、实验设备 序号 设备名称
使用仪器名称
数量 1 DL-CX-001 三相交流电源 1 2 WD01G 空开、熔断器模块 1 3 WD04G 热继电器模块 1 4 WD09G 按钮模块 1 5
WD02G
接触器模块
1
6 M04 三相鼠笼式异步电动机 1
四、实验内容及步骤
1、检查各实验设备外观及质量是否良好。
2、按图2三相鼠笼式异步电动机接触器点动控制线路进行正确的接线。先接主回路,再接控制回路。自己检查无误并经指导老师检认可后方可合闸通电实验。 (1)、热继电器值调到1.0A 。 (2)、合上漏电保护断路器及空气开关QF ,调节三相电源输出220V 。 (3)、按下起动按钮SB2时,观察电机工作情况,体会点动操作。(注意,操作次数不宜频
繁过多)
(4)断开空气开关QF,切断三相主电源。(5)断开漏电保护断路器,关断总电源。
五、实验接线图
实验二 三相异步电动机的可逆运转控制
一、概述
生产过程中,生产机械的运动部件往往要求能进行正反方向的运动,这就是拖动电机能作正反向旋转。由电机原理可知,将接至电机的三相电源进线中的任意两相对调,即可改变电机的旋转方向。但为了避免误动作引起电源相间短路,往往在这两个相反方向的单相运行线路中加设必要的机械及电气互锁。按照电机正反转操作顺序的不同,分别有“正—停—反”和“正—反—停”两种控制线路。对于“正—停—反”控制线路,要实现电机有“正转—反转”或“反转—正转”的控制,都必须按下停止按钮,再进行方向起动。然而对于生产过程中要求频繁的实现正反转的电机,为提高生产效率,减少辅助工时,往往要求能直接实现电机正反转控制。
图7是接触器联锁的三相异步电动机正反转控制线路(电机为Y 接法)
起动时,合上漏电保护断路器及空气开关QF ,引入三相电源。按下起动按钮SB2,接触器KM1线圈通电,其主触头KM1闭合,同时线圈KM1通过与开关SB2并联的辅助常开触点KM1实现自锁并且通过接触器KM2的辅助触点与接触器KM2形成互锁,电动机正转。当按下开关SB3时,接触器KM2线圈通电,其主触点KM2闭合,与开关SB3并联的辅助常开触点KM2使接触器KM2自锁。同时与接触器KM1互锁的辅助常闭触点KM2断开,使接触器KM1断电释放,主触头KM1断开,同时其辅助常闭触点KM1导通,电动机反转。要使电动机停止运行,按下开关SB1即可。
KM2KM1
KM1
KM2
KM1FU1
N
L
L3
L2
L1
QF KM1FR1
3~
M KM2
L
KM2
FU2
FU2
FR1SB1SB2SB3
图7
二、实验目的
1、掌握三相鼠笼式异步电动机正反转的工作原理、接线方式及操作方法。
2、掌握机械及电气互锁的连接方法及其在控制线路中所起的作用。
3、掌握接触器互锁控制的三相异步电动机正反转的控制线路。
三、实验设备 序号 设备名称
使用仪器名称
数量
1
DL-CX-001
三相交流电源
1
2 WD01G 空开、熔断器模块 1
3 WD04G 热继电器模块 1
4 WD09G 按钮模块 1
5 WD02G 接触器模块 2
6 M04 三相鼠笼式异步电动机 1
四、实验内容及步骤
1、检查各实验设备外观及质量是否良好。
2、按图7三相鼠笼异步电动机接触器联锁正反转控制线路进行正确接线,先接主回路,再接控制回路。自己检查无误并经指导老师检查认可方可合闸实验。
进行“正—停—反”操作
(1)、热继电器值调到1.0A。
(2)、合上漏电断路器及空气开关QF,调节三相电源输出220V。
(3)、按下起动按钮SB2,观察电动机及各接触器的工作情况。
(4)、按下停止按钮SB1,观察电动机的工作情况。
(5)、按下按钮SB3,观察接触器及电动机的工作情况。
(6)、按下停止按钮SB1,切断电机控制电源。
(7)、断开空气开关QF,切断三相主电源。
(8)、断开漏电保护断路器,关断总电源。
五、实验接线图
实验三:通电延时型控制线路
一、实验目的
1、观察时间继电器在电机控制中的作用。
2、练习连接简单的延时控制线路及操作。
3、练习自拟三相异步电动机延时控制电路。
二、实验原理
延时控制线路如图1所示。在线路中有两台异步电动机,而用两只交流接触器KM1、KM2来控制其转动。当按下SB2按钮,KM1的线圈加电,常开触头闭合,第一台电动机开始转动;同时时间继电器KT加电。经过一段时间后,KT的触头闭合,KM2的线圈加电,常开触头闭合,第二台电动机也开始转动即延时控制。当按下SB1时两台电动机同时停止转动
三、实验内容及步骤
1、观察时间继电器的型号、构造、研究其动作原理。
2、异步电动机延时启动控制
按图接线,然后接通电源,按下启动按钮,当第一台电动机启动后,观察是经过一段时间第二台电机才开始转动,掌握延时控制的原理。
四、实验接线图
五、实验总结
通过本次实验,我理解了时间继电器在电机控制中的作用,熟悉连接简单的延时控制线路及操作,熟悉了自拟三相异步电动机延时控制电路。以前自己对于通电延时型控制线路只是停留于理论层面,对于应用还不是太熟悉,通过本次实验,我对于通电延时型控制线路有了一个更透彻的理解,我想本次实验的顺利完成不仅与老师上课时认真讲解有关,还与自己
可下的预习密不可分。本次实验对自己的实践能力有了一个很大的提升。
实验四三相异步电动机Y—△减压起动控制
一、实验目的
1、熟悉复合按钮、熔断器、热继电器、接触器、电子式时间继电器的结构、工作原理
和使用方法。
2、掌握三相异步电动机Y—△减压起动控制线路的工作原理及接线方法。
3、熟悉上述线路的故障分析及排除故障的方法。
二、实验线路
三、实验设备及电器元件
1、三相异步电动机 1
2、LL—12通用电学实验台 1
3、电工工具及导线若干
四、实验步骤
1、熟悉实验设备及电器元件。
2、按图接线,先完成控制电路。
3、检查无误后通电试验,操作起动按钮并观察接触器、时间继电器的通断情况。
4、完成主电路接线并试验,观察电动机的运行情况。
五、实验总结
通过本次实验,我理解了复合按钮、熔断器、热继电器、接触器、电子式时间继电器的结构、工作原理和使用方法。掌握了三相异步电动机Y—△减压起动控制线路的工作原理及接线方法。熟悉了上述线路的故障分析及排除故障的方法。以前自己对于三相异步电动机Y—△减压起动只是停留于理论层面,对于应用还不是太熟悉,通过本次实验,我对于三相异步电动机Y—△减压起动有了一个更透彻的理解,我想本次实验的顺利完成不仅与老师上课时认真讲解有关,还与自己可下的预习密不可分。本次实验对自己的实践能力有了一个很大的提升。
实验五可编程控制器的基本指令编程练习
一、实验目的
1、熟悉PLC实验装置,S7-200系列编程控制器的外部接线方法
2、了解编程软件STEP7的编程环境,软件的使用方法。
3、掌握与、或、非逻辑功能的编程方法。
二、实验说明
首先应根据参考程序,判断Q0.0、Q0.1、Q0.2的输出状态,在拨动输入开关I0.1、I0.2、I0.3,观察输出指示灯Q0.1、Q0.2、Q0.3是否符合与、或、非逻辑的正确结果。
步序指令器件号说明步序指令器件号说明
0 LD I0.1 输入7 ANI I0.3
1 AN I0.3 输入8 = Q0.3 或非门输出
2 = Q0.1 与门输出9 LDI I0.1
3 LD I0.1 10 OI I0.3
4 O I0.3 11 = Q0.4 与非门输出
5 = Q0.2 或门输出12 END 程序结束
6 LDI I0.1
三、实验过程内容及步骤
梯形图程序:
1.梯形图中的I0.1、I0.3分别对应控制实验单元输入开关I0.1、I0.3。
2.通过专用PC/PPI电缆连接计算机与PLC主机。打开编程软件STEP7,逐条输入程序,检查无误后,将所编程序下载到主机内,并将可编程控制器主机上的STOP/RUN开关拨到RUN 位置,运行指示灯点亮,表明程序开始运行,有关的指示灯将显示运行结果。
3.拨动输入开关I0.1、I0.3,观察输出指示灯.Q0.1、Q0.2、Q0.3、Q0.4是否符合与、
L1
L2L3L4L8L7
L12
L5L6L11L10L9
或、非逻辑的正确结果。
实验六 喷泉的模拟控制
一、实验目的
用PLC 构成喷泉控制系统
二、实验内容
1.控制要求
隔灯闪烁:L1亮0.5秒后灭,接着L2亮0.5秒后灭, 接着L3亮0.5秒后灭,接
着L4亮0.5秒后灭,接着L5、L9亮0.5秒 后灭,接着L6、L10亮0.5秒后灭,接着L7、L11亮0.5秒后灭,接着L8、L12亮0.5秒
后灭,L1亮0.5秒后灭,如此循环下去。 图1-1 喷泉控制示意图
2.I/O 分配
输入 输出
起动按钮:I0.0 L1:Q0.0 L5、L9: Q0.4 停止按钮:I0.1 L2:Q0.1 L6、L10:Q0.5
L3:Q0.2 L7、L11:Q0.6 L4:Q0.3 L8、L12:Q0.7
3.按图所示的梯形图输入程序。 4.调试并运行程序。
三、喷泉控制语句表
0 LD I0.0 14 LD M0.1 27 LD M10.4 1 O M1.0 15 AN M0.0 28 = Q0.3 2 AN T37 16 TON T38,+5 29 LD M10.5 3 A I0.1 17 LD T38 30 = Q0.4 4 = M1.0 18 = M0.0 31 LD M10.6 5 LD M1.0 19
LD
M0.0
32
= Q0.5 6 TON T37,+5
20 SHRB M10.0,M10.1,+8 33 LD M10.7 7 LD T37 34 = Q0.6 8 O M11.0 21 LD M10.1 35 LD M11.0 9 = M10.0 22 = Q0.0 36 = Q0.7 10 LD I0.0 23 LD M10.2 37 LDN I0.1 11 O M0.1 24 = Q0.1 38 R M10.1,8 12 A I0.1 25 LD M10.3 13 =
M0.1
26
=
Q0.2
M1.0
I0.1
T37T37
I0.0M1.0M1.0
T38TON
TON IN PT
+5I0.1M10.0
+5M0.0
M0.0M0.1
IN PT SHRB EN +8N S_BIT
DATA
M10.0M10.1Q0.0
Q0.1Q0.2
Q0.3Q0.4
ENO T37M11.0I0.0M0.1M0.1
T38M0.0
M10.1M10.2M10.3M10.4M10.5Q0.5
Q0.6Q0.7R M10.18
M10.6M10.7M11.0I0.1
四、喷泉控制梯形图
五、实验接线图
六、操作步骤
1.检查实训设备中器材及调试程序。
2.按照I/O端口分配表或接线图完成PLC与实训模块之间的接线,认真检查,确保正确无
误。
3.编写好控制程序,进行编译,有错误时根据提示信息修改,直至无误,用PC/PPI通讯
编程电缆连接计算机串口与PLC通讯口,打开PLC主机电源开关,下载程序至PLC中,下载完毕后将PLC的“RUN/STOP”开关拨至“RUN”状态。
4.打开“启动”开关,系统进入自动运行状态,喷泉的模拟控制控制程序并观察工作状态。
5.关闭“启动”开关,系统停止运行。
七、实验结果及总结
达到了设计的要求和观察到了预期的实验效果;
1)PLC设计重点就在于梯形图的设计,需要有很巧妙的设计方法,虽然以前也试着设计过类似的梯形图,但我觉的设计出一个好的梯形图并不是一件简单的事;有好
多的东西,只有我们去试着做了,才能真正的掌握,只学习理论有些东西是很难理
解的,更谈不上掌握。
2)当程序出错时,要多观察、对错误重复n次,估计是由什么原因引起的,从电路整体来看、分析可能是什么错误,再缩小范围。如果实再找不出来,就出去吹吹风
吧,不能急于求成,但不要放弃;要保持你的头脑清醒。
3)在设计过程中,总是遇到这样或那样的问题。有时发现一个问题的时候,需要做大量的工作,花大量的时间才能解决。自然而然,我的耐心便在其中建立起来了。
为以后的工作积累了经验,增强了信心。
实验七交通灯的模拟控制
一、实验目的
用PLC构成交通灯控制系统
二、实验内容
1.控制要求
起动后,南北红灯亮并维持25s。在南北红灯亮的同时,东西绿灯也亮,1s后,东西车灯即甲亮。到20s时,东西绿灯闪亮,3s后熄灭,在东西绿灯熄灭后东西黄灯亮,同时甲灭。黄灯亮2s后灭东西红灯亮。与此同时,南北红灯
灭,南北绿灯亮。1s后,南北车灯即乙亮。南北绿灯
亮了25s后闪亮,3s后熄灭,同时乙灭,黄灯亮2s
后熄灭,南北红灯亮,东西绿灯亮,循环。
2.I/O分配
输入输出
起动按钮:I0.0 南北红灯:Q0.0 东西红灯:Q0.3
南北黄灯:Q0.1 东西黄灯:Q0.4
南北绿灯:Q0.2 东西绿灯:Q0.5
南北车灯(乙):Q0.6 东西车灯
(甲):Q0.7
3.按图所示的梯形图输入程序。
4.调试并运行程序。图5-1 交通灯控制示意图
三、交通灯控制语句表
1 LD I0.0 26 = Q0.3 51 LD T38
2 O M0.0 27 LD Q0.0 52 AN T39
3 = M0.0 28 AN T43 53 A T59
4 LD M0.0 29 = Q0.3 54 OLD
5 AN T41 30 LD Q0.0 55 = Q0.2
6 TON T37,+250 31 AN T43 56 LD Q0.3
7 LD T37 32 LD T43 57 AN T38
8 TON T41,+300 33 AN T44 58 LD LD
9 LD M0.0 34 A T59 59 AN T39
10 AN T37 35 OLD 60 OLD
11 TON T43,+200 36 = Q0.5 61 = T50,+10
12 LD T43 37 LD Q0.0 62 LD T50
13 TON T44,+30 38 AN T43 63 AN T39
14 LD T44 39 LD T43 64 = Q0.6
15 TON T42,+20 40 AN T44 65 LD T39
16 LD T37 41 OLD 66 AN T40
17 TON T38,+250 42 TON T49,+10 67 = Q0.1
18 LD T38 43 LD T49 68 LD M0.0
TON
T40
+20
T39
IN PT
TON
T39
+30
T38
IN PT
TON
T38
+25
T37
IN PT
TON
Q0.6T39T50IN
PT
+5
TON
T60
IN
PT
T60
M0.0
+5
T59
T40T39Q0.1
T59T37TON
IN
PT
T43TON
M0.0I0.0T41
IN PT
+300
M0.0
T37
M0.0T41+250
TON
IN
PT
TON
TON
Q0.0
T49Q0.5
IN PT
PT
IN +20
+30
T43
T44
Q0.3T37
T44T43T43M0.0T37
T43
Q0.0Q0.0T59
T42
T44
+200
M0.0
T37
PT
+10
Q0.4
Q0.7Q0.2
TON
PT
IN
+10T50T44
T42T44T38T39T43
T44
T49Q0.3
T38T38
T39Q0.3
T38
T59
IN
TON
19 TON T39,+30 44 AN T44 69 AN T60 20 LD T39 45 = Q0.7 70 TON T59,+5 21 TON T40,+20
46 LD T44 71 LD T59 22 LD M0.0 47 AN T42 72 TON T60,+5 23 AN T37 48 = Q0.4 73 LDN SMO.7 24 = Q0.0 49 LD Q0.3 74 R MO.O,100 25
LD
T37 50
AN
T38
四、交通灯控制梯形图
图5-2 交通灯梯形图
外部接线图:
五、实验总结
这个实验相比较前面的是实验的较为复杂,因为红路灯的各个时间嵌套很复杂,刚开始我们本来都做出来了,但老师说等的时间太常了,让我们再改一下,改后结果就出错了,并导致实验一直是做不出来,但最终还是通过我们的努力做出来了。通过此次实验我学到了不少的东西我也深刻的体会到细节决定胜负。在以后的试验中我们决不能
轻视每一个细节。
M
Y3Y2
L3
L2B L1Y1A
实验八 液体混合的模拟控制
一、实验目的
用PLC 构成液体混合控制系统
二、实验内容 1.控制要求
按下起动按钮,电磁阀Y1闭合,开始注入液体A,按L2表示液体到了L2的高度,停止注入液体A 。同时电磁阀Y2闭合,注入液体B ,按L1表示液体到了L1的高度,停止注入液体B ,开启搅拌机M ,搅拌4s ,停止搅拌。同时Y3为ON ,开始放出液体至液体高度为L3,
再经2s 停止放出液体。同时液体A 注入。开始循环。按停
止按扭,所有操作都停止,须重新启动。 2.I/O 分配 输入 输出
起动按钮:I0.0 Y1:Q0.1
停止按钮:I0.4 Y2:Q0.2 L1按钮: I0.1 Y3:Q0.3
L2按钮: I0.2 M :Q0.4 L3按钮: I0.3
3.按图所示的梯形图输入程序。
4.调试并运行程序。
三、液体混合控制语句表图 10-1 液体混合控制梯形图
1 LD I0.0 17 A I0.
2 32 LD M10.1 2 AN Q0.1 18 OLD 3
3 = Q0.1 3 AN Q0.2 19 LD M10.2 3
4 LD M10.2 4 AN Q0.3 20 A I0.1 3
5 = Q0.2 5 AN Q0.4 21 OLD 3
6 LD M10.3 6 LD M0.1 22 LD M10.3 3
7 = Q0.4 7 CTU C1,+1 23 A T37 3
8 TON T37,+40 8 LD Q0.3 24 OLD 3
9 LD M10.4 9
EU
25 LD M10.4 40 O M10.5 10 = M0.1 26 A I0.3 41 = Q0.3 11 LD C1 27 OLD 42 LD M10.5 12 O M10.6 28 LD M10.5 43 TON T38,+20 13 EU 29 A T38 44 LDN I0.4 14 = M10.0 30 OLD
45
R M10.0,7 15 LD M10.0 31
SHRB
M10.0,M10.1,+6 46 R C1,1 16 LD
M10.1
四、液体混合控制梯形图
C1CTU
CU PV
+1
R Q0.4ENO Q0.3M0.1EN M10.0
Q0.1
I0.2P
P
Q0.2I0.0M0.1
Q0.3
C1
M10.6M10.1M10.0N S_BIT +6M10.1I0.3T37I0.1T38
Q0.2Q0.4
Q0.1
TON
IN PT
TON IN PT
T38
+40 +207
R
R C1
Q0.3
M10.0
T37M10.3M10.2M10.4M10.1M10.3
M10.2M10.5M10.5M10.4I0.4
M10.5
DATA
M10.0SHRB 1
图10-2 液体混合控制梯形图
WEB编程实验报告---南昌大学
实验报告 实验课程:JA V A WEB编程技术 学生姓名: 学号: 专业班级:物流101班 2013年 06 月 12 日 目录
实验一WEB编程环境......................... 错误!未定义书签。实验二HTML和CSS编程技术 (7) 实验三JA V ASCRIPT编程技术 (10) 实验四SERVLET编程技术 (13) 实验五JSP编程技术 (16) 实验六JA V ABEAN编程技术 (21) 实验七基于MVC模式构建系统 (25) 南昌大学实验报告 学生姓名:学号:专业班级:物流101班
实验类型:□验证□综合■设计□创新实验日期:实验成绩: 一、实验项目一Web编程环境 二、实验目的 第1章搭建Web编程环境,能正确安装配置java运行环境、WEB服务器和数据库服务器 第2章熟悉WEB编程集成环境MYEclipse. 第3章熟练掌握WEB工程的创建、发布、运行流程。 三、实验内容 1.安装并配置java运行环境JDK和JRE 2.安装Web服务器tomcat, 配置Tomcat服务器 3.安装并配置数据库MySQL. 4.安装MyEclispe,熟悉各项菜单项 5.为MyEclispe集成配置JDK和Tomcat 6.创建、发布、运行一个WEB工程。 四、实验仪器及耗材 计算机,JDK,TOMCA T, MySQL, MyEclipse等软件。 五、实验步骤 1.先安装jdk1.6,选择自定义安装,安装到C:\JDK 2.配置环境变量,class:.;C:\JDK\bin , classpath:.;C:\JDK\lib ,java_home: C:\JDK 安装tomcat,安装在C:\ Tomcat 下,配置tomcat_home环境变量,CATALINA_HOME: C: \Tomcat,CATALINA_BASE: C: \Tomcat,TOMCAT_HOME: C:\Tomcat 然后修改环境变量中的classpath,把tomat安装目录下的common\lib下的servlet.jar 追加到classpath中去,修改后的classpath如下: classpath=.;%JAVA_HOME%\lib\dt.jar;%JAVA_HOME%\lib\tools.jar;%CATALINA_HOME%\c ommon\lib\servlet.jar;
plc实验报告
《可编程序控制器及应用》实验报告一 实验名称:PLC基本指令实验 3.实验原理和设计思想 (1). 开关量信号的边沿检测。 PLS(上升沿脉冲):原件Y、M仅在驱动输入接通后的一个扫描周期内动作(置1)。 PLF(下降沿脉冲):原件Y、M仅在驱动输入断开后的一个扫描周期内动作。 (2). 延时断开电路。 OUT输出:驱动定时器线圈、驱动计数器线圈 (3). 信号灯闪烁电路。 OR或:常开触点并联链接 多重输出电路 OUT输出:驱动定时器线圈、驱动计数器线圈 (4).抢答指示灯控制电路 有A、B、C 三人参加智力竞赛,当主持人接通抢答允许开关后,抢答开始,最先按下按钮的抢答者指示灯亮,与此同时,禁止另外两人的灯亮,指示灯在主持人断开抢答允许开关后熄灭。 4.PLC的I/O端分配及接线电路图
5.PLC程序(梯形图) (1). 开关量信号的边沿检测。 用PLS 指令检测开关量信号的上升沿;用PLF 指令检测开关量信号的下降沿。 设计实验方法、画出电路、编制梯形图、验证实验结果。 (2). 延时断开电路。 LED 在输入按钮按下的上升沿变为亮,在按钮变为OFF 后的6s,LED 才变为OFF。 (3). 信号灯闪烁电路。 用二个定时器实现指示灯LED 通电1.5s、断电1.2s 的闪烁过程。 (4).抢答指示灯控制电路
6.实验调试过程和运行现象 (1). 开关量信号的边沿检测。 用PLS 指令检测开关量信号的上升沿;用PLF 指令检测开关量信号的下降沿。 现象:SB1常开→X0灯亮→Y0灯亮→LED灯1亮 SB2常开→SB2常闭→Y1灯亮→LED灯2亮 (2). 延时断开电路。 LED 在输入按钮按下的上升沿变为亮,在按钮变为OFF 后的6s,LED 才变为OFF。 现象:按下按钮灯亮,松开按钮6S后,LED灯灭 (3). 信号灯闪烁电路。 用二个定时器实现指示灯LED 通电1.5s、断电1.2s 的闪烁过程。 现象:LED灯亮1.5s、灭1.2s,形成闪烁过程。 (4).抢答指示灯控制电路 有A、B、C 三人参加智力竞赛,当主持人接通抢答允许开关后,抢答开始,最先按下按钮的抢答者指示灯亮,与此同时,禁止另外两人的灯亮,指示灯在主持人断开抢答允许开关后熄灭。 7.实验结果分析 进一步熟悉编程软件的使用方法,掌握了PLS(上升沿脉冲) , PLF(下降沿脉冲),OR或,多重输出电路,OUT输出指令的使用和编程方法。
杨实验三
南昌大学实验报告 学生姓名:学号:专业班级:电气信息三类106班实验类型:□验证□√综合□设计□创新实验日期:实验成绩: 一.实验名称 实验3 控制语句 二.实验目的 1.熟练掌握if 、if…else、if…elseif语句和switch语句格式及使用方法,掌握if语句中的嵌套关系和匹配原则,利用if语句和switch语句实现分支选择结构。 2.熟练掌握while语句、do ...while语句和for语句格式及使用方法,掌握三种循环控制语句的循环过程以及循环结构的嵌套,利用循环语句实现循环结构。 3.掌握简单、常用的算法,并在编程过程中体验各种算法的编程技巧。进一步学习调试程序,掌握语法错误和逻辑错误的检查方法。 三.实验内容 1.选择结构程序设计; 2.if语句的使用; 3.使用switch语句实现多分支选择结构; 4.三种循环语句的应用; 5.循环结构的嵌套; 6.break和continue语句的使用。 三.实验环境 PC微机 DOS操作系统或Windows 操作系统 Visual c++程序集成环境 四.实验内容和步骤 本实验要求事先编好解决下面问题的程序,然后上机输入程序并调试运行程序。学会单步调试和断点调试程序及变量跟踪方法。 1.通过键盘输入一个字符,判断该字符是数字字符、大写字母、小写字母、空格还是其他字符。
.编程:输入一个整数,判断该数的正负性和奇偶性之后,将其数值按照①小于10,②10~99,③100~999,④1000以上四个类别分类并显示。 要求: (1)将变量定义为整型。 (2)输入整数前,利用puts()/printf()给出提示信息。 (3)输出结果时要有必要的说明,例如:输入358时,显示358 is 100 to 999。 (4)该程序利用if语句实现。 运行程序,分别输入9,21,321,4321数据检查输出信息的正确性。
s__plc实验报告
实验1 单容水箱液位调节阀控制 一、实验目的 了解液位控制的构成环节,调节阀的工作原理,熟悉上位机组态王的组态及通讯。通过实验,掌握PID参数整定。 二、实验要求 1.实验前需熟悉实验的设备装置以及管路构成。 2.熟悉仪表装置,如检测单元、控制单元、执行单元等。 3.以4:1标准衰减震荡作为指标,整定出最佳比例度、积分时间和微分时间。 三、实验设备及系统组成 1.实验设备 (1)水泵P102 (2)电动调节阀:工作电源24V AC,控制信号2—10VDC。 (3)液位传感器:量程为0—100%,输出信号4—20mA。 2.系统组成 单容下水箱液位PID控制流程图如图7.1所示。 图7.1 单容下水箱液位调节阀PID单回路控制 测点清单如表7.1所示。 水介质由泵P102从水箱V104中加压获得压力,经由调节阀FV101进入水箱V103,通过手阀QV-116回流至水箱V104而形成水循环;其中,水箱V103的液位由LT103测得,
用调节手阀QV-116的开启程度来模拟负载的大小。本例为定值自动调节系统,FV101为操纵变量,LT103为被控变量,采用PID调节来完成。 需要全打开的手阀:QV102、QV105 需要全关闭的手阀:QV103、QV104、QV107、QV109; 挡板开度:QV116 5mm。 四、控制器编程 1.创建新的项目 启动软件step7-V4.0,默认出现一个新项目窗口,选:文件>另存为,写入你的项目名称。我们这里“单回路PID”为项目名称。 在这个项目里为了实现PID控制功能,使用了一个子程序,它只在PLC第一次运行时调用一次,它的作用是初始化;使用一个中断程序,它每0.1秒调用一次,它的作用是PID 计算,每0.1秒采集一次数据,进行一次计算,输出一次控制信息。 2.建立通信 在第这个阶段,将建立计算机与PLC的通信。在每次打开step7软件时都要通信,否则是离线状态。 在安装软件时己经设置过串口通信参数,但是有时系统安装了别的软件需要更改参数和重新设置,如图4.2.1所示: 图4.2.1 step7中设置通讯参数 设置通讯参数如以下图4.2.2到4.2.5所示。
南昌大学化学实验报告
南昌大学化学实验报告 篇一:南昌大学实验报告 南昌大学实验报告 学号:6100512094 专业班级:信息管理与信息系统122班 实验类型:□验证□综合□设计□创新实验日期:XX/4/3 实验成绩: 实验一实验环境的建立 一、实验目的: 1.了解SQL Server XX常用版本和对操作系统的不同要求 2.熟悉SQL Server XX的基本性能 3.正确安装和配置SQL Server XX 二、实验基本原理 SQL即结构化查询语言,是关系数据库的标准语言,SQL 是一个综合的、功能极强同时又简洁易学的语言。它集数据查询、数据操纵、数据定义和数据控制功能于一体。自SQL 成为国际标准语言之后,各个数据库厂家纷纷推出各自的SQL软件或与SQL的接口软件。这就使大多数 数据库均用SQL作为共同的数据存取语言和标准接口,使不同数据库系统之间的互操作有了共同的基础。
三、主要仪器设备及耗材 相互连成LAN的计算机2台以上,windows XX server 操作系统,SQL Server XX安装标准版安装软件。 四、实验步骤 安SQL Server XX:将安装光盘放入CD-ROM,将自动弹出“SQL Server自动菜单”界面,如果没有自动弹出则选择光盘根目录下的autorun.exe,双击运行: 选择运行“安装SQL Server XX组件”进入安装组件界面,选择“安装数据库服务器”。进入安装界面后,按照安装提示进行安装;一般需要人工进行干预的有: 选择安装类型和安装路径:安装类型有:典型安装、最小安装、和自定义安装。安装路径是指SQL Server的系统文件和数据文件的安装位置。默认情况下“安装类型”是典型安装,“安装路径”是操作系统设定的“Program Files”文件夹。你可以自行改变,初次安装最好不要改变他,按默认情况使用; 配置启动服务的帐号:有两类用户帐号:一类是与Windows操作系统的集成帐号,一类是混合帐号。选择第一类帐号进行安装;配置服务器端网络库:SQL Server支持多种网络库,这些网络库必须与操作系统的网络协议共同工作,才能实现客户机与数据库服务器的通信。安装完成后,可以通过操作系统的开始菜单操作:“开始”―>SQL Server”->
FX系列PLC实验课实验报告
FX系列PLC实验课实验报告 实验一 四节传送带的模拟控制 一、实验目的 用PLC构成四节传送带控制系统 二、实验器材 FX2N-48MR型的PLC主机1台、机械手实验装置演示板1台、微型计算机1台编程电缆1根、连接导线若干 三、实验内容 控制要求 起动后,先起动最末的皮带机,1s后再依次起动其它的皮带机;停止时,先停止最初的皮带机,1s后再依次停止其它的皮带机;当某条皮带机发生故障时,该机及前面的应立即停止,以后的每隔1s顺序停止;当某条皮带机有重物时,该皮带机前面的应立即停止,该皮带机运行1s后停止,再1s后接下去的一台停止,依此类推。 22.OI/O分配 输入 输出起动按钮SB1: 0.00 M1:10.01 停止按钮SB2: 0.05 M2:10.02负载或故障A: 0.01 M3:10.03负载或故障B: 0.02 M4:10.04负载或故障C: 0.03负载或故障D:
0.04 3.接线 图4 四节传送带控制示意图 +24 0V PLC COM 10.010.00 COM0.01 10.02 +24 COM SB1 M1 M2 M3 0.02 COM0.03 10.030.04 10.04 0.05A B C D SB2传送带输入M4 传送带输出 三、梯形图编程 实验二
机械手的CPLC的自动控制 一、实验目的 1.掌握机械手步进控制程序设计 2.进一步加强对顺控指令的理解和应用 二、实验器材 1.FX2N-48MR型的PLC主机1台、机械手实验装置演示板1台、微型计算机1台 2.编程电缆1根、连接导线若干 三、实验内容 1.机械手的工作示意图如下图所示 开始时.机械手处于原始位置.上限位灯Y1亮,左限位灯Y4灯亮,(原点),Y7灯亮(放松),按下起动按钮SB后,机械手的顺序动作为: ①机械手下降,Y1,Y4灯灭,到下限位后(压下下限开关SQl,Y2灯亮)转入第②步。 ②延时了T后,机械手夹紧(夹紧灯Y3亮),转入第③步。 ③机械手上升,Y2灯灭,到上限位后(压下上限开关SQ2,Y1,Y4灯亮)。转入第④步。 ④延时T后,机械手右行,Y1,Y4灯灭,到右限位后(压下右限开关SQ3,Y5、Y2亮)转入第⑤步。 ⑤机械手下降,Y2,Y5灭,下降到位后(压下下限开关SQ1,Y6灯亮)转入第⑥步。 ⑥延时T后,机械手放松(Y3灭,Y7亮)转入第⑦步。 ⑦延时T后,机械手上升,Y6灯灭,上升到位后(压下上限开关SQ2,Y8灯亮)转入第⑧步。 ⑧机械手左移:左移到限位后(压下SQ4,Y8灯灭,Yl灯亮,Y7灯亮)回到原点、整个循环过程结束.机械手上升、下降、左行、右行分别有输出指示Y12—Y15表示。 2.I/0地址 输人地址:启动按钮 SB ——
plc实验报告
PLC原理及应用实验报告 课程题目 学院名称 专业名称 学生姓名 学生学号 指导老师 设计(论文)成绩 教务处制 2016年月日
第一章 可编程控制器的概述 可编程序控制器,英文称Programmable Logical Controller ,简称PLC 。 它是一个以微处理器为核心的数字运算操作的电子系统装置,专为在工业现场应 用而设计,它采用可编程序的存储器,用以在其内部存储执行逻辑运算、顺序控 制、定时/计数和算术运算等操作指令,并通过数字式或模拟式的输入、输出接 口,控制各种类型的机械或生产过程。PLC 是微机技术与传统的继电接触控制技 术相结合的产物,它克服了继电接触控制系统中的机械触点的复杂接线、可靠性 低、功耗高、通用性和灵活性差的缺点,充分利用了微处理器的优点,又照顾到 现场电气操作维修人员的技能与习惯,特别是PLC 的程序编制,不需要专门的计 算机编程语言知识,而是采用了一套以继电器梯形图为基础的简单指令形式,使 用户程序编制形象、直观、方便易学;调试与查错也都很方便。用户在购到所需 的PLC 后,只需按说明书的提示,做少量的接线和简易的用户程序的编制工作, 就可灵活方便地将PLC 应用于生产实践。 一、可编程控制器的基本结构 可编程控制器主要由CPU 模块、输入模块、输出模块和编程器组成(如下图 所示)。 二、可编程控制器的工作原理 可编程控制器有两种基本的工作状态,即运行(RUN )状态与停止(STOP )状态。 在运行状态,可编程序控制器通过执行反映控制要求的用户程序来实现控制功能。为 了使可编程序控制器的输出及时地响应随时可能变化的输入信号,用户程序不是只执 行一次,而是反复不断地重复执行,直至可编程序控制器停机或切换到STOP 工作状态。 除了执行用户程序之外,在每次循环过程中,可编程序控制器还要完成内部处理、 通信处理等工作,一次循环可分为5个阶段(如图所示) 在内部处理阶段,可编程序控制器检查CPU ,模块内部 的硬件是否正常,将监控定时器复位,以及完成一些别的内 部工作。 在通信服务阶段,可编程序控制器与带微处理器的智能 装置通信,响应编程器键入的命令,更新编程器的显示内容。 在输入处理阶段,可编程序控制器把所有外部输入电路的 接通/断开(ON/OFF )状态读入输入映像寄存器。 在程序执行阶段,即使外部输入信号的状态发生了变化,输入映像寄存器的状态输入模块CPU 模块输出模块可编程序控制器编程装置接触器电磁阀指示灯电源 电源 限位开关选择开关按钮
plc实验报告-10页文档资料
题目: PLC实验报告书 专业:机械设计制造及其自动化 老师:袁勇 班级: 072092 学号: 20091001861 姓名:李亚锋 PLC实验报告 一、实验目的: 熟练掌握可编程控制器编程软件的操作方法,熟悉梯程序设计及其编程技巧,完成基本的实验项目。 二、实验内容: 按照下面给出的控制要求编写梯形图程序,下载到可编程控制器中运行。根据运行情况进行调试、修改程序、直到通过为止。 实验项目一: 1.走廊灯两地控制 2.走廊灯三地控制 3.圆盘正反转控制 4.下车直线行驶正反向自动往返控制 5.单按钮单路输出控制 实验项目二: 1. 多谐振荡控制 2. 圆盘计时计数控制
3. 十字交通灯的控制 实验一: 1.走廊灯两地控制 1)控制要求:走廊两地处有两个开关控制一个灯,无论按那个开关灯就亮,再按任何一个开关灯就熄灭。 2)I/O口分配: 3)梯形图程序 图1 走廊两地控制 4)实验结果: 当开关0.00闭合,0.01断开时,灯10.00亮;当开关0.00闭合,0.01闭合,灯10.00灭;当开关0.00断开,0.01闭合,灯10.00亮;当开关0.00断开,0.01断开,灯10.00灭。 2.走廊三地灯控制 1)控制要求:走廊三地处有三个开关控制一个灯,无论按那个开关灯就亮,再按任何一个开关灯就熄灭。 2)I/O分配:
3)梯形图程序: 图2 走廊三地控制 4)实验结果: 三个开关都处于断开状态,随意拨动一个开关电灯就点亮,然后在随意改变一个开关的状态电灯就熄灭,再随意改变一个开关的状态电灯就熄灭。3.圆盘正反转控制 1)控制要求:用三个按钮来控制电机,其中一个控制电机正转,另一个控制电机反转,再一个控制电机停转。 2)I/O分配: 3)梯形图程序: 图3 圆盘正反转控制 4)实验结果: 当拨动正转按钮时,电机正转;当拨动反转按钮时,电机反转;无论电机
南昌大学《MATLAB与控制系统仿真》实验报告综述
实验报告 实验课程: MATLAB与控制系统仿真 姓名: 学号: 专业班级: 2016年 6月
目录实验一 MATLAB的环境与基本运算(一) 实验二 MATLAB的环境与基本运算(二) 实验三 MATLAB语言的程序设计 实验四 MATLAB的图形绘制 实验五基于SIMULINK的系统仿真 实验六控制系统的频域与时域分析 实验七控制系统PID校正器设计法 实验八线性方程组求解及函数求极值
实验一 MATLAB的环境与基本运算(一) 一、实验目的 1.熟悉MATLAB开发环境 2.掌握矩阵、变量、表达式的各种基本运算 二、实验基本原理 1.熟悉MATLAB环境: MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。 2.掌握MA TLAB常用命令 表1 MA TLAB常用命令 3.MATLAB变量与运算符 3.1变量命名规则 3.2 MATLAB的各种常用运算符 表2 MA TLAB算术运算符 表4 MATLAB逻辑运算符
表5 MATLAB特殊运算 4.MATLAB的一维、二维数组的寻访 表6 子数组访问与赋值常用的相关指令格式 三、主要仪器设备及耗材 计算机 四、实验内容 1.新建一个文件夹(自己的名字命名,在机器的最后一个盘符) 2.启动MATLAB,将该文件夹添加到MATLAB路径管理器中。 3.学习使用help命令。 4.窗口命令 ● close ● close all ● clc ● hold on ● hold off 了解其功能和作用,观察command window、command history和workspace等窗口的变化结果。5.工作空间管理命令 ● who ● whos ● clear 6.随机生成一个2×6的矩阵,写出实现矩阵左旋(以第1行第1列为中心逆时针)90°或右旋(顺
plc实训报告
PLC实训报告 学院:工程学院 专业:电气工程及其自动化 班级: 姓名: 学号: 指导教师: 起止日期:2014年11月24日~2014年12月05日
一、PLC介绍 1、PLC的基本概念 可编程控制器(Programmable Logic Controller,PLC)是以微处理器为基础,综合了计算机技术,自动控制技术和通信技术发展起来的一种通用的工业自动控制装置。它具有体积小、功能强、灵活通用与维护方便等一系列的优点。特别是工、交通、电力等领域获得了广泛的应用,成为现代工业控制的三大支柱之一。 可编程控制器是一种存储器控制器,支持控制系统工作的程序存放在存储器中利用程序来实现控制逻辑,完成控制任务、在可编程控制器构成的控制系统中,要实现一个控制任务,首先要针对具体的被控对象,分析它对控制系统的要求,然后编出相应的控制程序,利用编程器将控制程序写入可编程控制器的程序存储器中。系统运行时,可编程控制器依次读取程序存储器中的程序语句,对它们的内容加以解释并执行。现代PLC已经成为真正的工业控制设备。 可编程控制器的分类:根据硬件结构的不同,可以将PLC分为整体式、模块式和混合式。 1、PLC的结构 PLC实质是一种专用于工业控制的计算机,其硬件结构基本上与微型计算机相同。 ①CPU模块 中央处理单元(CPU)是PLC的控制中枢。它按照PLC系统程序赋予的功能接收并存储从编程器键入的用户程序和数据;检查电源、存储器、I/O以及警戒定时器的状态,并能诊断用户程序中的语法错误。当PLC投入运行时,首先它以扫描的方式接收现场各输入装置的状态和数据,并分别存入I/O映像区,然后从用户程序存储器中逐条读取用户程序,经过命令解释后按指令的规定执行逻辑或算数运算的结果送入I/O映像区或数据寄存器内。等所有的用户程序执行完毕之后,最后将I/O映像区的各输出状态或输出寄存器内的数据传送到相应的输出装置,如此循环运行,直到停止运行。 为了进一步提高PLC的可靠性,近年来对大型PLC还采取双CPU构成冗余系统,或采用三CPU的表决式系统。这样,即使某个CPU出现故障,整个系统仍能
海南大学plc实验报告
电气控制及可编程序控制器技术 实验一电机正反转控制 一、实验目的 1.学习和掌握PLC的实际操作和使用方法; 2.学习和掌握PLC控制三相异步电动机正反转的硬件电路设计方法; 3.学习和掌握PLC控制三相异步电动机正反转的程序设计方法; 4.学习和掌握PLC控制系统的现场接线与软硬件调试方法。 二、实验设备 主机模块,电源模板,电机正反转控制实验板,开关、按钮板,连接导线一套。三、实验原理 三相异步电动机定子三相绕组接入三相交流电,产生旋转磁场,旋转磁场切割转子绕组产生感应电流和电磁力,在感应电流和电磁力的共同作用下,转子随着旋转磁场的旋转方向转动。因此转子的旋转方向是通过改变定子旋转磁场旋转的方向来实现的,而旋转磁场的旋转方向只需改变三相定子绕组任意两相的电源相序就可实现。 四、控制要求 1、初始状态 接触器KM1、KM2都处于断开状态,电机M1处于停止状态。 2、启动操作 (1) 正转控制 按下电机正转按钮SB2,KM1闭合,电机M1正转;按下按钮SB1,电机停止运行。 (2) 反转控制 按下电机反转按钮SB4,KM2闭合,电机M1反转;按下按钮SB1,电机停止运行。 (3) 正反转切换控制 当电机正转时,按下按钮SB4,KM1断电,KM2闭合,电机M1反转。 当电机反转时,按下按钮SB2,KM2断电,KM1闭合,电机M1正转。 3、停止操作 按下停止按钮SB1,电机M1无论在何种状态电机都将停止运行。 4、过载保护
当电机过载时(按下按钮FR1),电机停止运行。 五、输入输出分配 1、输入 SB1——X001(停止按钮) SB2——X002(电机M1正转按钮) SB4——X004(电机M1反转按钮) FR1——X005(热继电器保护) 2、输出 KM1——Y001(电机正转接触器) KM2——Y002(电机反转接触器) 六、实验程序 1.梯形图程序 2.指令表程序
综合性实验项目:报纸电子编辑基本操作流程
1南昌大学实验报告 ---综合性实验项目:报纸电子编辑基本 操作流程 学生姓名:唐晓君学号:5000110076 专业班级:新闻学101班 实验名称:综合性实验项目名称报纸电子编辑基本操作流程 实验日期:6月1日实验成绩: 一、实验目的及要求: 本次试验要求学生利用所学的只是进行完整的版面编排,旨在强化学生的创 新意识。 二、实验基本原理: 报纸编辑在报纸生产过程中所进行的一系列工作总称为报纸编辑工作。包括 策划、编稿、组版三个业务范围。策划指报纸策划和报道策划;编稿指分析与选 择稿件、修改稿件和制作标题;组版指配置版的内容和设计报纸版面。 编辑工作流程既包括较为宏观的编辑决策与设计工序,又包括具体的编稿、组稿、组版工序。 《90视界》是一群90后精心打造的一份报纸,根据课程进度,我们进行着 不同的工作。在早期的编委会开会讨论中,我们确定好了报纸的编辑方针,设计 报纸的整体规模和内部结构,设计内容、形式与风格特色等,在这个同意的理念 指导下,我们确定好分工,每个人分别负责不同版面的策划、选稿、组版、编辑 等具体工作,大家宏观的编辑决策的指引下保证自己负责的版面与编辑方针相统一,保证整份报纸的统一性。 三、主要仪器设备及实验耗材: 1台教师机、50 台学生机、北大方正飞腾集成排版软件、Photoshop图片处 理软件 四、实验内容或步骤: 1、确定报纸的编辑方针、设计报纸的整体规模和内部结构; (1)、报纸定位说明: 随着21世纪的到来,我国正处于一个大的转型环境下,社会矛盾不断凸显,而随着70、80后在社会上的良好表现,他们现在占据社会生活生产的主流。但 是随着社会的发展和人们的热切期盼,整个社会越来越关注这样一批出生在改革 开放后的新生群体,特别是在2008年期间,社会上对90后这样一个群体进行了 广泛的讨论。因此,我们为了向广大的受众能够从各个方面了解90后这样一个 年轻的、富有朝气的群体提供一些信息,同时也为方便社会各方面讨论90后提 供一个专属平台。 (2)、四开八版小报,周刊。 版面设计:
南昌大学PLC实验报告讲解
实验一三相异步电动机接触器点动控制线路 (2) 实验二三相异步电动机的可逆运转控制 (4) 实验三通电延时型控制线路 (6) 实验四可编程控制器的基本指令编程练习 (8) 实验五喷泉的模拟控制 (10) 实验六交通灯的模拟控制 (13) 实验七液体混合的模拟控制 (16)
实验一 三相异步电动机接触器点动控制线路 一、概述 三相笼式异步电机由于结构简单、性价比高、维修方便等优点获得了广泛的应用。在工农业生产中,经常采用继电器接触控制系统对中小功率笼式异步电机进行点动控制,其控制线路大部分由继电器、接触器、按钮等有触头电器组成。 图2是三相鼠笼异步电动机接触器点动控制线路(电机为Y 接法) 起动时,合上漏电保护断路器及空气开关QF ,引入三相电源。按下起动按钮SB2时,交流接触器KM1的线圈通电,主触头KM1闭合,电动机接通电源起动。当手松开按钮时,接触器KM1断电释放,主触头KM1断开,电动机电源被切断而停止运转。 FR1 FU1KM1 QF L1 L2 L3 L KM1 M 3~ FR1 N FU2 FU2 L SB1 SB2 二、实验目的 1、 了解时间继电器的结构,掌握其工作原理及使用方法。 2、 掌握Y-Δ起动的工作原理。 3、 熟悉实验线路的故障分析及排除故障的方法。 三、实验设备 序号 设备名称 使用仪器名称 数量 1 DL-CX-001 三相交流电源 1 2 WD01G 空开、熔断器模块 1 3 WD04G 热继电器模块 1 4 WD09G 按钮模块 1 5 WD02G 接触器模块 1 6 M04 三相鼠笼式异步电动机 1 四、实验内容及步骤 1、检查各实验设备外观及质量是否良好。 2、按图2三相鼠笼式异步电动机接触器点动控制线路进行正确的接线。先接主回路,再接控制回路。自己检查无误并经指导老师检认可后方可合闸通电实验。 (1)、热继电器值调到1.0A 。 (2)、合上漏电保护断路器及空气开关QF ,调节三相电源输出220V 。 (3)、按下起动按钮SB2时,观察电机工作情况,体会点动操作。(注意,操作次数不宜频
plc实验报告4个
大学PLC实验报告 学院: 班级: 学号: 姓名: 日期:2014
实验一智能抢答器控制 一、实验目的 用PLC构成抢答器控制系统 二、实验内容 1.控制要求 3人的抢答控制。当主持人宣布开始时,各选手开始抢答,当某一选手最先抢答到时,其指示灯亮,同时其他选手不能抢答,只到主持人复位,才可以重新抢答。 2.被控对象 4 . 接线
5、状态时序图
6、调试过程 分别按下各选手的抢答按钮,观察是否可屏蔽其他两位选手的抢答要求,按主持人复位键,互锁是否消除,是否可重新抢答。 三、实验结论 以互锁的原理实现各选手抢答的唯一性。并能很好的利用常闭开关的特性实现主持人的复位操作。 四、实验心得 在实现自身抢答的同时,还要屏蔽其他选手的抢答,所以必须应用到互锁。同时主持人复位键以常闭开关实现个各选手的复位。 实验二轧钢机生产线控制 一、实验目的 1.掌握PLC的编程软件平台及位逻辑、定时器、计数器、中断等指令的编程方法 2.掌握PLC下位机与PC上位机通讯、软件调试的方法 3. 设计出轧钢机生产线的电气接线图和PLC控制程序 二、实验内容 (一)控制功能要求 1.无限循环轧制 (1)按下启动按钮,系统运行。 (2)按下外扩按钮K1,电机M1,M2运转,传送带1运转。当检测到传送带1有钢板 时,钢板检测传感器SP1为ON(按下SP1按钮来模拟检测传感器常开接点闭合),同时电机M3,M4旋转,传送带2运转,经4S后钢板传送到初轧轧辊位置时,电磁阀YV1为ON,并初轧3S。 (2)当钢板到达传送带2位置时,钢板检测传感器SP2为ON(按下SP2按钮模拟检 测传感器),同时电机M1,M2停止运转、传送带1也停止运转、电机M5运转、传送带3运转,经4S钢板传送到精轧轧辊位置,电磁阀YV2为ON,精轧2S后,钢板传送到传送带3,钢板检测传感器SP3为ON(按下SP3按钮模拟检测传感器),这时电机M3,M4停止,M5运转。再实现无限循环轧制功能。 2. 计数轧制控制 按下外扩按钮K2,按照上述顺序进行计数轧制,用计数器记录循环轧制次数,2次后停止计数轧制,计数器清零 3. 按下停止按钮,整个系统停止 (二) 被控对象 被控对象由电机拖动传送带、钢坯、电感式检测传感器、轧机、指示灯、按钮等组成,本控制将钢坯通过初轧和精轧两个过程,轧制成2mm厚的薄钢板产品,供给生产单位使用,每循环一次轧制出一张薄钢板产品,示意图如下所示。
PLC实验报告03146
物流自动化PLC实验报告姓名:伍颖 学号: 8 班级:流134 班 电话: 安徽工业大学管理科学与工程学院 编写:陈彬徐斌暴伟 2015年5月
一、实验设备 PC机一台,可编程控制器实验系统一套,编程电缆一根,导线若干 二、PLC实验系统的组成 可编程序控制器(简称PLC)在进行生产控制或实验时,都要求将用户程序的编码表送入PLC的程序存贮器,运行时PLC根据检测到的输入信号和程序进行运算判断,然后通过输出电路去控制对象。因此典型的PLC系统由以下三个部分组成:PLC主机,输入/输出接口,编程软件。 在我们的可编程控制器实验系统中,选用的PLC主机是SIMATIC S7-200 CPU222,有8个输入点,6个输出点,可采用助记符和梯形图两种编程方式. 使用S7-200的编程软件STEP 7-Micro/WIN,可以在计算机屏幕上直接生成和编辑梯形图或指令表程序,程序被翻译后下载到PLC。可以将PLC中的程序上载到计算机,还可以用STEP 7-Micro/WIN监控PLC。一般用USB/PPI编程电缆来实现编程计算机与PLC的通信。 输入接口:将输入接口的相应端口,根据需要与按钮用双头线相连即可。按钮的一端、PLC的公共端已经接好。这样,当按下按钮时,相应端口的输入指示灯就会点亮,表示有输入到PLC。 输出接口:将输出接口的相应端口,根据需要与指示灯或电机接口用双头线相连即可。指示灯的一端、PLC的公共端已经接好。这样当PLC的相应的输出端口有输出时,所接的发光二极管点亮。 可编程控制器实验系统面板布置示意图如图1-2所示 在图 DC24V和DC5V 16个输入14个输出。 是输入控制端1M、2M与输入端的对应关系。 表1-1
南昌大学公差实验报告
实验报告 实验课程: 学生姓名: 学号: 专业班级:
南昌大学实验报告 学生姓名:学号:专业班级: 实验类型:□验证□综合□设计□创新实验日期:实验成绩: 实验一、公差与技术测量综合性实验 一、实验目的与要求 为了使学生对《公差与技术测量》这门课程有一个整体、深入的认识,联系提高学生动手能力及工程实践能力。开设该综合性实验,使学生能根据被测量零件,从已有的实验设备中选择合理测量仪器,确定测量方法步骤,并对零件的合格性与否做出相应的判断。 二、主要仪器设备及耗材 1、数字立式光学计 数字立式光学计光学主要用作相对法测量,在测量前先用量块或标准件对准零位,被测尺寸和量块(或标准件)尺寸的差值可在仪器的显示。 使用说明 1)按被测件的验收尺寸组合量块 2)选择测头 3)调整仪器零位 4)工件测量 2、涨簧式内径百分表 主要用于以比较法测量通孔、盲孔或深孔的直径。 使用方法 1)内径百分表的装夹 2)测量方法 根据被测孔的内尺寸选择校对环规,先检查内径百分表的相互作用,然后对零,对好零位,把内径百分表从环规(或千分尺)内取出来。测量时,把涨簧测头放入被测孔内后,摆动表架,找出百分比读数最大值,该值就是被测孔与环规孔径(或千分尺读数)的差。 3、表面粗糙度测量仪 JB-2C粗糙度测试仪可用于轴承内外圈滚道表面粗糙度测量,它利用仪器的测针与被测表面相接触,并使测针沿其表面轻轻划过以测量表面粗糙度的一种测量法。 操作方法 打开微机及主机箱右下侧电源开关 1)进入测量程序 2)调整被测件位置 3)进行测量 4)选择范围 5)设置参数 6)显示和打印 4、量块 量块是由两个相互平行的测量面中心之间的距离来确定其工作长度的一种高精度量具。量块的精度分级又分等1)量块按制造精度分为0、1、2、3、4级,其中0级精度最高,2)按检定精度分为1、2、3、4、5、6等,其中1等精度最高。
plc红绿灯实验报告
竭诚为您提供优质文档/双击可除plc红绿灯实验报告 篇一:交通灯pLc控制实验报告 交通灯的pLc控制实验报告 学院:自动化学院班级:0811103姓名:张乃心学号:20XX213307 实验目的 1.熟悉pLc编程软件的使用和程序的调试方法。2.加深对pLc循环顺序扫描的工作过程的理解。3.掌握pLc的硬件接线方法。 4.通过pLc对红绿灯的变时控制,加深对pLc按时间控制功能的理解。5.熟悉掌握pLc的基本指令以及定时器指令的正确使用方法。 实验设备 1.含可编程序控制器microLogix1500系列pLc的Demo 实验箱一个 2.可编程序控制器的编程器一个(装有编程软件的pc 电脑)及编程电缆。3.导线若干
实验原理 交通指挥信号灯图 I/o端子分配如下表 注:pLc的24VDc端接Demo模块的24V+;pLc的com端接Demo模块的com。 系统硬件连线与控制要求 采用1764-L32Lsp型号的microLogix1500可编程控制器,进行 I/o端子的连线。它由220VAc供电,输入回路中要串入24V直流电源。1764系列可编程控制器的产品目录号的各位含义如下示。1764:产品系列的代号L:基本单元 24:32个I/o点(12个输入点,12个输出点)b:24V 直流输入w:继电器输出 A:100/240V交流供电 下图为可编程控制器控制交通信号灯的I/o端子的连线图。本实验中模拟交通信号灯的指示灯由24V直流电源供电。o/2-o/4为南北交通信号灯,o/5-o/7为东西交通信号灯。 实现交通指挥信号灯的控制,交通指挥信号灯的布置,控制要求如下:(1)信号灯受一个启动开关控制,当启动开关接通时,信号灯系统开始正常工作,且先南北红灯亮,东西绿灯亮。当启动开关断开时,所有信号灯熄灭。 (2)南北红灯维持25秒。在南北红灯亮的同时东西绿
PLC实验报告
实验一、认识实验 一、实验目的 1、初步了解EFPLC装置组成及各部分作用 2、初步学会安装和使用STEP7编程软件 3、最简单的程序输入及调试 二、实验设备 1、EFPLC可编程序控制器实验装置 2、输入输出模块 三、实验内容 1、安装STEP7编程软件 2、STEP7编程软件的应用 3、程序的编写及调试 四、上机练习 1、安装STEP7 软件。 2、熟悉编程环境,会输入最简单指令。并运行和调试。 3、学会使用S7-PLCSIM仿真软件。
实验二、基本指令的应用 一、实验目的 1、了解各种基本指令的使用 2、进一步熟悉STEP7的使用 二、实验设备 1、EFPLC可编程序控制器实验装置 2、输入输出模块 三、实验内容 1、位逻辑指令 2、定时器与计数器指令 3、数据处理类指令 4、数学运算类指令 5、逻辑控制类指令 6、程序控制类指令 四、上机练习 练习教材上各种基本指令及习题
实验三、五星彩灯实验 一、实验目的 编制PLC程序,组成不同的灯光闪烁状态。 二、实验设备 1、EFPLC可编程序控制器实验装置 2、五星彩灯及八段码显示实验板EFPLC0101 3、连接导线若干 三、实验内容 1、控制要求:10个红色发光二极管,L1-L10的亮、 暗组合须有一定的规律。隔1秒钟,变化一次,周而 复始循环。 2、I/O(输入、输出)地址分配 五星彩灯板上J3接EFPLC实验装置上的J2。 输出点定义: 3、按照要求编写程序 4、运行 启动程序,仔细观察L1~L10亮暗组合次序是否符合设计要求。若不符合,反复调试;符合则可停止程序。
实验四、八段数码管显示实验 一、实验目的 用PLC完成八段数码管显示 二、实验设备 1、EFPLC可编程序控制器实验装置。 2、电机控制实验板EFPLC0101 。 3、连接导线若干。 三、实验内容 1、控制要求:将八段数码正确显示,并从0-9连续自 动变化。 2、I/O(输入、输出)地址分配 3、按照要求编写程序 4、运行 启动程序,反复调试。符合要求后,停止程序运行。 四、编程练习 配合EFPLC0100实验板,完成一个多组抢答器(四组以上)。 控制要求:在复位后,任一组抢先按下按钮后,数码管应立即显示那一组的组号数字。后按的任何组的按钮不起作用(互锁、自锁)。复位后,可进行下一轮抢答。
南昌大学信息组织实验报告
实验报告 实验课程:信息组织 学生姓名: 学号: 专业班级:信管111班 2014年5月
南昌大学实验报告 学生姓名:学号:专业班级:信管111班 实验类型:■验证□综合□设计□创新实验日期:实验成绩: 实验一 实验题目:红岩 ?00000991nam022******** ?0010000772891 ?00520130109154133.34 ?010__|a978-7-5153-1267-5|d CNY36.00 ?100__|a20130109d2012em y0chiy0110ea ?1010_|a chi ?102__|a CN|b110000 ?105__|a a z000ay ?106__|a r ?2001_|a红岩|9hong yan|f罗广斌,杨益言著|g韩和平,金奎图 ?210__|a北京|c中国青年出版社|d2012.12 ?215__|a565页|c图|d21cm ?300__|a红色经典文库 ?330__|a本书是一部以共产党人为争取中国人民解放而进行的壮烈斗争为题材的优秀长篇小说。作者罗广斌、杨益言曾被共同关押在“中美特种技术合作所”的集中营里,亲身经历过敌人的种种野蛮暴行和共产党人不屈不挠的斗争生活。 ?333__|a本书适用于小说爱好者 ?6060_|a长篇小说|y中国|z当代 ?690__|a I247.5|v5 ?701_0|a罗广斌|9luo guang bin|f(1924-1967)|4著 ?701_0|a杨益言|9yang yi yan|f(1925-)|4著 ?702_0|a韩和平|9han he ping|4图 ?702_0|a金奎|9jin kui|4图 ?801_0|a CN|b浙江省新华书店集团公司|c20130109
最新南昌大学实验报告-声速测量
声速测量(实验报告格式)课程名称:大学物理实验 实验名称:声速测量 学院:专业班级: 学生姓名:学号: 实验地点:104 座位号: 实验时间:第周星期一下午16点开始 一、 二、实验项目名称:声速测量 三、实验目的: 1、学会测量超声波在空气中的传播速度方法。 2、
3、理解驻波和振动合成理论。 4、学会逐差法进行数据处理。 5、了解压电换能器的功能和培养综合使用仪器的能力。 四、 五、 实验原理: 根据声速、声波频率、波长间的关系:λf v =,测得声波的频率和波长,就可求的声速。声波频率由信号发生器产生,可直接显示,故只需测得声波波长即可。有驻波法和相位法。 1、驻波法 实验时将信号发生器输出的正弦电压信号接到发射超声换能器上,超声发射换能器通过电声转换,将电压信号变为超声波,以超声波形式发射出去。接收换能器通过声电转换,将声波信号变为电压信号后,送入示波器观察。设沿x 方向射出的入射波方称为:)2cos(1x wt A y λ π -=,反射方程: )2cos(2x wt A y λπ+=,A 为声源振幅,w 为角频率,x λ π2为由于波动传播到坐标x 处引起的相位变化。所以合振动方程:
y=y1+y2=wt x A cos )2cos 2(λπ ;在声驻波中,波腹处声压(空气中 由于声扰动而引起的超出静态大气压强的那部分压强)最小,而波节处声压最大。当接收换能器的反射界面处为波节时,声压效应最大,经接收器转换成电信号后从示波器上观察到的电压信号幅值也是极大值,所以可从接收换能器端面声压的变化来判断超声波驻波是否形成。移动卡尺游标,改变两只换能器端面的距离,在一系列特定的距离上,媒质中将出现稳定的驻波共振现象,此时,两换能器间的距离等于半波长的整数倍,只要我们监测接收换能器输出电压幅度的变化,记录下相邻两次出现最大电压数值时(即接收器位于波节处)卡尺的读数(两读数之差的绝对值等于半波长),则根据公式:就可算出超声波在空气中的传播速度,其中超声波的频率可由信号发生器直接读得。 2、相位法 波是振动状态的传播,也可以说是位相的传播。在声波传播方向上,所有质点的振动位相逐一落后,各点的振动位相又随时间变化。声波波源和接收点存在着位相差,而这位相差则可以通过比较接收换能器输出的电信号与发射换能器输入的正弦交变电压信号的位相关系中得出,并可利用示波器的李萨如图形来观察。相差和角频率、传播时间t 之间有如下关系: 同时有,,,(式