永磁电机由磁路计算到瞬态场的仿真步骤
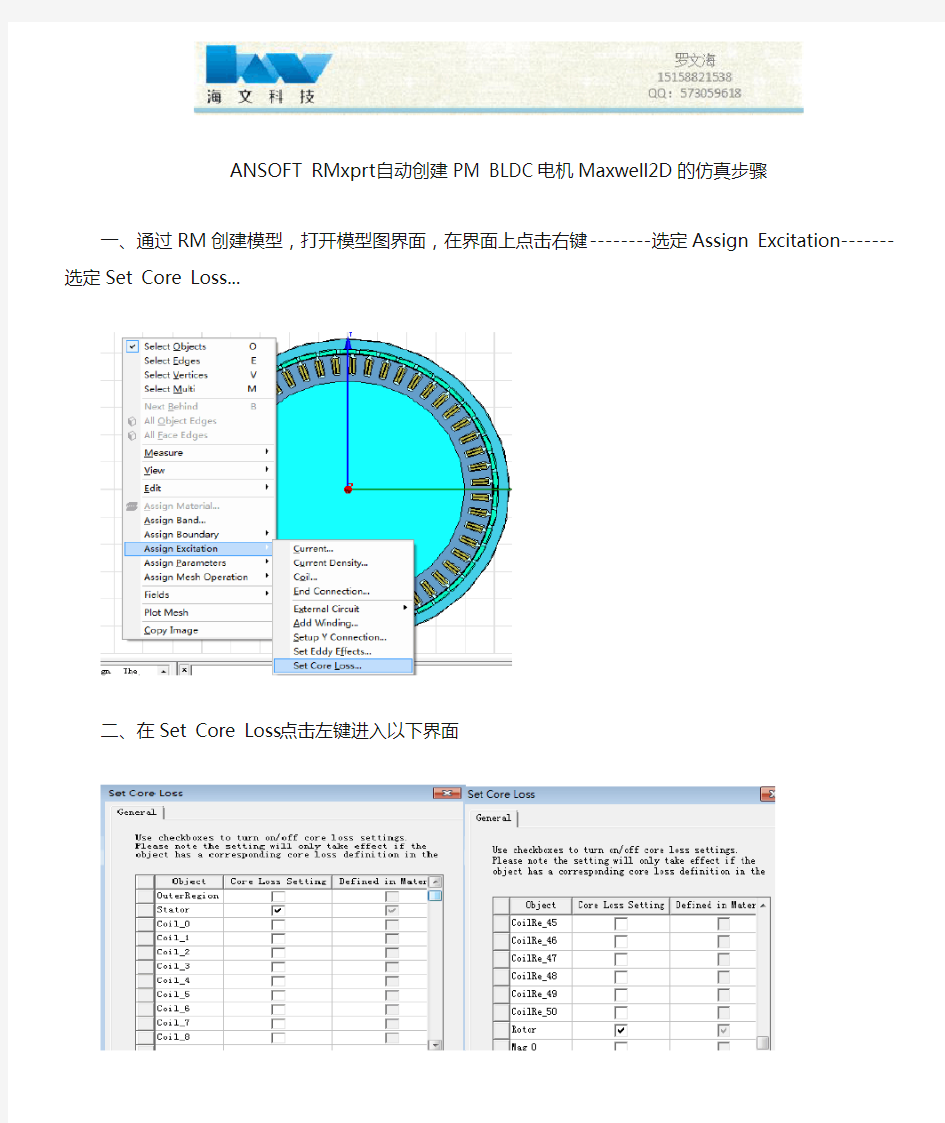

ANSOFT RMxprt自动创建PM BLDC电机Maxwell2D的仿真步骤一、通过RM创建模型,打开模型图界面,在界面上点击右键--------选定Assign Excitation-------选定Set Core Loss...
二、在Set Core Loss点击左键进入以下界面
在Stator和Rotor后面的Core Loss Setting栏复选框点击出现如上图所示√,注意如果是系统定义的软磁材料后面的Defined in Material栏下的小方框里会出现√这表示在定义材料特性时,已经将铁耗计算相关的系数已经定义,可以用于铁耗计算。
三、添加一个求解设置
点击选中项目结构树种中的Analysis下的Setup1,点击右键弹出如左图对话框,点击Properties弹出右图求解器对话框
在对话框General选项下设置求解器的停止时间Stop time通常为电机转过720o电角度(2个电角度周期)所需的时间,如果后处理电流或者转矩的瞬态波形还处于收敛状态,说明需要增加求解时间,可以设置为2.5个电角度周期。瞬态场计算时间步长Time step一般而言越小越好,但过小会延长求解器计算时间,通常按设定的速度转动1o所需要的时间来设置。
接下来设置下图来保存系统需要保存的从开始到停止的中间计算时刻点的模型
在这里,默认的设置为保存三个点的求解模型和相应的计算结果数据,可以修改起点Start、停止点Stop和时间步长Step数据获得更多的时刻点数据,然后点击Add to list增加到计算时刻点列表里,如下图所示
上图设定时间步长为0.001,也就是保存包括0时刻的11个时刻点的数据,这样我们能在在后面观察到0时刻的位置,观察磁钢轴线(D轴)和电机A相轴线的位置关系(在《ANSOFT仿真中的初始位置和编码器零点分析》中会详细讨论。
三、按照下图所示在Analysis处Setup1处点击右键弹出如下对话框,选中Analysis点击开始计算
四、按下图所示在Results处点击右键弹出如下对话框依次如图选中Create Transient Report-------Rectangular Plot点击左键进入到第五步
五、经过第四步骤操作将弹出下面的对话框,在图中Gategory选中Loss,然后选中Coreloss,选中项背景框如图变蓝,然后点击图中的New Report,这样就能在ANSOFT Results中添加XY Plot 1显示结果。
六、在ANSOFT Results中添加XY Plot 1观察铁耗结果
点击XY Plot 1弹出铁耗图
在Results观察转矩计算结果
在Results观察电流计算结果
永磁同步电动机电磁场计算中定转子空间相对位置确定的研究
第34卷第2期2004年3月 东南大学学报( 自然科学版) JO UR NAL OF S OUTHEA ST UNIVER SITY (Natural Science Edition) Vol 134No 12 Mar.2004 永磁同步电动机电磁场计算中定转子 空间相对位置确定的研究 刘瑞芳1,3 严登俊2 胡敏强1 (1东南大学电气工程系,南京210096)(2河海大学电气工程学院,南京210098)(3北京交通大学电气学院,北京100044) 摘要:采用通用有限元软件对永磁同步电动机电磁场分析时,存在着电动机定、转子轴线相对位置未知的问题,而确定这个相对位置是任意负载下磁场计算的前提.本文通过研究电动机电磁量之间的关系找到特定内功率因数角下气隙合成电势和内功率角的特征.提出一种相当于逆问题分析的处理方法,在不同定子电流初相位下进行计算,搜寻对应于特定内功率因数角磁场分布,从而求得定转子空间的初始相对位置. 关键词:永磁同步电动机;有限元;定转子空间相对位置 中图分类号:T M351 文献标识码:A 文章编号:1001-0505(2004)022******* Investigation in determining the relative position between stator and rotor of a PMSM in electromagnetic field calculation Liu Ruifang 1,3 Yan D engjun 2 Hu Minqiang 1 (1Department of Electrical Engineering,Southeas t Univers ity,Nanjing 210096,C hina)(2C ollege of Electrical Engineering,Hohai Univers ity,Nanjing 210098,C hina)(3School of Electrical Engineering,Beijing Ji aotong University,B eiji ng 100044,Chi na) Abstract:When designing universal finite ele ment sof tw are for analyzing the per manent magnet synchronous motors (PM S Ms),the relative position of the stator and rotor a xis remains unkno wn.How ever determining the relative position is a precondition for electroma gnetic field calculation.Through analyzing the basic relationship of variables in synchronous machines the characteristics of air gap resultant E M F and inner power angle under special inner po wer factor angle can be obtained.A technique similar to inverse problem solving is proposed in this paper.A series of electromagnetic field calculation under different armature current initial phase angles are carried out firstly,then through searching the field of special inner pow er factor angles the relative position of rotor and stator can be determined subsequently.Key words:PM S M;finite element method (FE M);relative position of stator and rotor 收稿日期:2003201222. 作者简介:刘瑞芳(1971)),女,博士生;胡敏强(联系人),男,博 士,教授,博士生导师,m qhu@https://www.360docs.net/doc/168396012.html,. 在永磁同步电动机通用软件设计中,存在着电动机定、转子相对位置未知的问题,而确定这个相对位置是进行永磁同步电动机负载磁场计算的前提.现有文献多采用根据具体电动机的结构和槽号 分配来判断定、转子轴线相对位置[1~3].但对通用程序,软件系统应当具有自动判断定、转子初始相对位置的功能,否则会使用户对程序的干预大大增加,不易实现程序的自动化和通用化. 1 定转子空间相对位置的确定问题 根据M axwell 方程,永磁同步电动机的二维电磁场边值问题可以表述为
永磁同步电机交直轴电感计算
参数化扫描的有问题,但是趋势应该差不多 《永磁电机》 永磁同步电机分为表面式和内置式。 由于永磁体特别是稀土永磁体的磁导率近似等于真空磁导率,对于表面式,直轴磁阻和交轴磁阻相等,因此交直轴电感相等,即Ld=Lq,表现出隐极性质。对于内置式,直轴磁阻大于交轴磁阻(交轴通过路径的磁导率大于直轴),因此Ld 效应,则气隙磁压降为H H=H H H=H H H0H=H H0 Φ HH H ,式中,Ф为每极磁通;δ为气隙 长度;τ为极距;La为铁心长度。 调速永磁同步电机转子结构分为表面型和内置型。由于永磁体特别是稀土永磁体的磁导率近似等于真空磁导率,对于表面式,直轴磁阻与交轴磁阻相等,因此交直轴电感相等,即Ld=Lq,表现出隐极性质。而对其他结构,直轴磁阻大于交轴磁阻,因此Ld (一)PMSM的数学模型 交流电机是一个非线性、强耦合的多变量系统。永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上。在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的。为了简化永磁同步电机的数学模型,我们通常做如下假设: 1)忽略电机的磁路饱和,认为磁路是线性的; 2)不考虑涡流和磁滞损耗; 3)当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势,忽略气隙中的高次谐波; 4)驱动开关管和续流二极管为理想元件; 5)忽略齿槽、换向过程和电枢反应等影响。 永磁同步电机的数学模型山电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下: (1)电机在两相旋转坐标系中的电压方程如下式所示: 叫=RJd + Ld - — 3趴 at 此 dt 其中,Rs为定子电阻;ud、uq分别为d、q轴上的两相电压;id、iq分别为d、q轴上对应的两相电流;Ld、Lq分别为直轴电感和交轴电感;为电角速度;巾d、Wq 分别为直轴磁链和交轴磁链。 若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相静止坐标系的变换,如下式所示。 / X cos 8 一sin。 (22 、 2 / \ = cos(。一—-sm(8— 3 3 宀 2 2 cos(& + -?r) 一sin(8 + - I 3 3丿 (2)d/q轴磁链方程: 其中,Wf为永磁体产生的磁链,为常数,,而◎=% 是机械角速度,P为同步电机的 极对数,3c为电角速度,eO为空载反电动势,其值为 永磁直流電機設計 1.電機主要尺寸與功率,轉速的關系: 與異步電機相似,直流電機的功率,轉速之間的關系是: D22*Lg=6.1*108*p’/(αP*A*Bg*Ky*n) (1) D2 電樞直徑(cm) 電机初設計時的主要尺寸 Lg 電樞計算長度(cm) 根據電机功率和實際需要確定 p’計算功率(w) p’=E*Ia=(1+2η)*P N/3η E=Ce*Φ*n*Ky=(P*N/60*a)*Φ2*n*Ky*10-8 Ce 電勢系數 a 支路數在小功率電機中取a=2 p 极數在小功率電機中取p=2 N 電樞總導体數 n 電机額定轉速 Ky 電樞繞組短矩系數小功率永磁電机p=2時,采用單疊繞組Ky=Sin[(y1/τ)*π/2] y1繞組第一節矩 αP 極弧系數一般取αP=0.6~0.75 正弦分布時αP=0.637 Φ每極磁通Φ=αP*τ*Lg*Bg τ極矩(cm) τ=π*D2/P Bg 氣隙磁密(Gs) 又稱磁負荷對鋁鎳Bg=(0.5~0.7) Br 對鐵氧体Bg=(0.7~0.85) Br, Br為剩磁密度 A 電樞線負荷 A=Ia*N/(a*π*D2)Ia電樞額定電流對連續運行的永磁電動机,一般取A=(30~80)A/cm另外電機負荷Δ= Ia/(a*Sd),其中Sd=π*d2/4 d為導線直徑.為了保証發熱因子A*Δ≦1400 (A/cm*A/mm2 )通常以電樞直徑D2和電樞外徑La作為電机主要尺寸,而把電動機的輸出功率和轉睦為電机的主要性能,在主要尺寸和主要性能的基礎上,我們就可以設計電機了. 在(1)式的基礎上經過變換可為: D22*Lg*n/P’=(6.1*108/π2)*1/(αP*Bg*A)=C A 由上式可以看, C A的值並不取決於電機的容量和轉速,也不直接與電樞直徑和長度有關,它 僅取決於氣隙的平均磁密及電樞線負荷,而Bg和A的變化很小,它近似為常數,通常稱為電機 常數,它的導數K A=1/C A=(p’/n)/(D22* Lg)∞αP*Bg*A 稱為電機利用系數,它是正比於單位電 樞有效体積產生的電磁轉矩的一個比例常數. 2.直流電機定子的確定 2.1磁鋼內徑 根據電機電樞外徑D2確定磁鋼內徑 Dmi=D2+2g+2Hp 其中g為氣隙長度,小功率直流電機g=0.02-0.06cm ,鐵氧體時g可取得大些,鋁鎳鈷磁 鋼電機可取得較小,因鐵氧體H C較大.氣隙對電機的性能有很大的影響,較小的g可以使電樞 反應引起的氣隙磁場畸變加劇,使電機的換向不良加劇,及電機運行不穩定,主極表面損耗和 噪音加劇,以及電樞撓度加大,較大的氣隙,使電機效率下降,溫升提高. 有時電機磁鋼采用極靴,這樣可以起聚磁作用,提高氣隙磁密,還可稠節極靴 形狀以改善空載氣隙磁場波形,負載時交軸電樞反應磁通經極靴閉,合對永磁磁 極的影響較小.但這樣會使磁鋼結構复雜,制造成本增加,漏磁系數較大,外形尺 寸增加,負載時氣隙磁場的畸變較大.而無極靴時永磁體直接面向氣隙,漏磁系數小,能產生較多的磁通,材料利用率高,氣隙磁場畸變,而且結構簡單,便於生產. 其缺點是容易引起不可逆退磁現象. Hp 極靴高(cm) 無極靴結構時Hp=0 2.2磁鋼外徑 Dm0=Dmi+2Hm (瓦片形結構) Hm 永磁體磁路長度,它的尺寸應從滿足(1)有足夠的氣隙磁密(產生不可逆退磁),(2)在要求的任何情運行狀態下會形成永久性退磁等方面來確定,一般Hm=(5~15)g Hm越大,則氣隙磁密也越大,否則,則氣隙磁密也越小. 2.3磁鋼截面積Sm 對于鐵氧體由于Br小,則Sm取較大值,而對于鋁鎳鈷來說, Br較大,則Sm取小值. 環形鐵氧體磁鋼截面積: Sm=αP*π*(Dmi+Hm)Lg/P (cm) 电机设计计算常用公式 1.输出功率2P 2P 2.外施相电压1U 1U 3.功电流KW I 1 13 210U m P I KW ??= 4.效率η' η' 5.功率因数?'cos ?'cos 6.极数p p 7.定子槽数1Q 1Q 转子槽数2Q 2Q 8.定子每极槽数 p Q Q P 1 1= 转子每极槽数 p Q Q P 2 2= 9.定转子冲片尺寸见图 10.极距P τ p D i P 1 ?= πτ 11.定子齿距1t 1 1 1Q D t i ?= π 12.转子齿距2t 2 2 2Q D t ?= π 13.节距y y 14.转子斜槽宽SK B SK B 15.每槽导体数1Z 1Z 16.每相串联导体数1φZ 1 11 11a m Z Q Z ??= φ 式中: 1a = 17.绕组线规(估算) ?η' ?'= ' ' ??'= ' ?'cos 11 11 11KW I I a I S N 式中:导线并绕根数·截面积 '?'11S N 查表 取' ?'11S N 定子电流初步估算值 ?η' ?'= 'cos I I KW 1 定子电流密度' ?1 '?1 18.槽满率 (1)槽面积 2 2221R h h b R S S S S π+ ??? ??-'+= (2)槽绝缘占面积 ?? ? ??+++' =122S S i i b R R h C S π (3)槽有效面积 i S e S S S -= (4)槽满率 e f S d Z N S 2 11??= 绝缘厚度i C i C 导体绝缘后外径d d 槽契厚度h h 19.铁心长l 铁心有效长 无径向通风道 g l l eff 2+= 净铁心长 无径向通风道 l K l Fe Fe ?= 铁心压装系数Fe K Fe K 20.绕组系数 111p d dp K K K ?= (1)分布系数 2sin 2sin 111 αα???? ???= q q K d 式中: p m Q q ?= 11 1 永磁同步电机设计 1电机仿真模型 (a )原型电机(b )新型电机 图1PM-Y2-180-4电机整体有限元仿真模型 图2新型电机转子1/4模型 2静态有限元仿真结果比较 2.1永磁磁场分布 当永磁体单独作用时,两种电机的磁力线分布如图3所示。 (a )原型电机(b )新型电机 图3两种电机永磁磁场分布 2.2永磁气隙磁密波形 当永磁体单独作用时,两种电机一个周期范围(即一对永磁体范围)的永磁气隙磁密波形如图4所示。 (a )原型电机 (b )新型电机 (c )两种电机比较 图4两种电机永磁气隙磁密分布 3空载稳态有限元仿真结果比较 3.1空载永磁磁链、空载永磁反电势波形 空载情况下,两种电机的三相绕组电流均设置为零,电机中磁场由永磁体单独产生。设置电机稳态运行转速为n =3000r/min ,可得到两种电机的空载永磁磁链、空载永磁反电势波形分别如图5、图6所示。由于三相绕组对称,在此仅给出A 相绕组仿真结果。 图5两种电机空载永磁磁链 图6两种电机空载永磁反电势 3.2空载永磁磁链、空载永磁反电势谐波分析 利用Matlab 对图5、图6的波形进行傅里叶分析,可得到两种电机磁链及反电势的各次谐波分量,如图7所示。 (a )空载永磁磁链(b )空载永磁反电势 图7磁链及反电势谐波分量分析 通过对两种电机的空载永磁磁链和空载永磁反电势进行谐波分析,得到以下结论:(1)3次谐波分量是主要谐波分量;(2)偶次谐波分量几乎为零,奇次谐波分量相对较大;(3)采用新型电机结构可在一定程度上削弱3次谐波分量,但同时会引起5、7次谐波分量增加,总体削弱谐波效果并不明显。 4负载稳态有限元仿真结果比较 4.1电枢绕组通入三相对称电压 两种电机具有相同的参数如下:电阻R =0.0410947?,电感L =5.87143?10?5H ,额定转速n =3000r/min 。给电枢绕组通入三相对称电压: A B C 310.269sin(20035.3581/180) 310.269sin(20035.3581/1802/3)310.269sin(20035.3581/1802/3) u t u t u t ππππππππ=+=+-=++(1) 并进行有限元仿真,得到两种电机的绕组电流及转矩波形,分别如图8、图9所示。 (a )原型电机 (b )新型电机 图8两种电机绕组电流波形 无刷直流永磁电动机设计实例 一. 主要技术指标 1. 额定功率:W 30P N = 2. 额定电压:V U N 48=,直流 3. 额定电流:A I N 1< 3. 额定转速:m in /10000r n N = 4. 工作状态:短期运行 5. 设计方式:按方波设计 6. 外形尺寸:m 065.0036.0?φ 二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P ' 直流电动机 W P K P N N m i 48.4063 .030 85.0'=?= = η,按陈世坤书。 长期运行 N i P P ?'' += 'ηη321 短期运行 N i P P ?'' += 'η η431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比(L/D )λ′=2 7.计算电枢内径 m n B A P D N s i i i 233 11037.110000 255.0110008.048 .401.61.6-?=?????=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-?= 8. 气隙长度m 3107.0-?=δ 9. 电枢外径m D 211095.2-?= 10. 极对数p=1 11. 计算电枢铁芯长 m D L i 221108.2104.12--?=??='='λ 根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-? 12. 极距 m p D i 22 1 102.22 104.114.32--?=??==πτ 13. 输入永磁体轴向长m L L m 2108.2-?== 三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22 1 10733.06 104.114.3--?=??==π 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: m K B tB b Fe t t 2210294.096 .043.155 .010733.0--?=???==δ ,t B 可由 设计者经验得1.43T ,t b 由工艺取m 210295.0-? 5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056 .196.0255 .08.02.222-?=????=≈Φ= δδτ 半匝长度292 磁路计算 采用Ansoft自带的磁路计算模块,RMxprt进行初期的电机电磁计算。 RMxprt计算结果如下: ADJUSTABLE-SPEED PERMANENT MAGNET SYNCHRONOUS MOTOR DESIGN GENERAL DATA Rated Output Power (kW): 11.7 Rated Voltage (V): 333 Number of Poles: 10 Frequency (Hz): 60 Frictional Loss (W): 175.5 Windage Loss (W): 40 Rotor Position: Inner Type of Circuit: Y3 Type of Source: Sine Domain: T ime Operating Temperature (C): 75 STATOR DATA Number of Stator Slots: 24 Outer Diameter of Stator (mm): 210 Inner Diameter of Stator (mm): 136 Type of Stator Slot: 3 Dimension of Stator Slot hs0 (mm): 1.5 hs1 (mm): 1.352 hs2 (mm): 21.65 bs0 (mm): 3.5 bs1 (mm): 9.3 bs2 (mm): 14.9 rs (mm): 1 Top Tooth Width (mm): 9.26977 Bottom Tooth Width (mm): 9.35135 Skew Width (Number of Slots): 0.393 Length of Stator Core (mm): 218 Stacking Factor of Stator Core: 0.95 Type of Steel: 50W470 Slot Insulation Thickness (mm): 0 Layer Insulation Thickness (mm): 0 End Length Adjustment (mm): 0 Number of Parallel Branches: 2 Number of Conductors per Slot: 58 Type of Coils: 21 Average Coil Pitch: 2 Number of Wires per Conductor: 4 Wire Diameter (mm): 0.85 Wire Wrap Thickness (mm): 0.06 Net Slot Area (mm^2): 278.32 Limited Slot Fill Factor (%): 75 Stator Slot Fill Factor (%): 69.0282 Coil Half-Turn Length (mm): 291.698 ROTOR DATA Minimum Air Gap (mm): 1 Inner Diameter (mm): 80 Length of Rotor (mm): 218 Stacking Factor of Iron Core: 1 Type of Steel: iron Polar Arc Radius (mm): 63.5 Mechanical Pole Embrace: 0.8543 Electrical Pole Embrace: 0.838481 Max. Thickness of Magnet (mm): 3.5 Width of Magnet (mm): 35.0244 Type of Magnet: N42SH60 Type of Rotor: 1 Magnetic Shaft: Yes PERMANENT MAGNET DATA Residual Flux Density (Tesla): 1.248 Coercive Force (kA/m): 952 Maximum Energy Density (kJ/m^3): 297.024 Relative Recoil Permeability: 1.04323 Demagnetized Flux Density (Tesla): 0 Recoil Residual Flux Density (Tesla): 1.248 Recoil Coercive Force (kA/m): 952 MATERIAL CONSUMPTION Armature Wire Density (kg/m^3): 8900 Permanent Magnet Density (kg/m^3): 7500 Armature Core Steel Density (kg/m^3): 7750 ANSOFT RMxprt自动创建PM BLDC电机Maxwell2D的仿真步骤一、通过RM创建模型,打开模型图界面,在界面上点击右键--------选定Assign Excitation-------选定Set Core Loss... 二、在Set Core Loss点击左键进入以下界面 在Stator和Rotor后面的Core Loss Setting栏复选框点击出现如上图所示√,注意如果是系统定义的软磁材料后面的Defined in Material栏下的小方框里会出现√这表示在定义材料特性时,已经将铁耗计算相关的系数已经定义,可以用于铁耗计算。 三、添加一个求解设置 点击选中项目结构树种中的Analysis下的Setup1,点击右键弹出如左图对话框,点击Properties弹出右图求解器对话框 在对话框General选项下设置求解器的停止时间Stop time通常为电机转过720o电角度(2个电角度周期)所需的时间,如果后处理电流或者转矩的瞬态波形还处于收敛状态,说明需要增加求解时间,可以设置为2.5个电角度周期。瞬态场计算时间步长Time step一般而言越小越好,但过小会延长求解器计算时间,通常按设定的速度转动1o所需要的时间来设置。 接下来设置下图来保存系统需要保存的从开始到停止的中间计算时刻点的模型 在这里,默认的设置为保存三个点的求解模型和相应的计算结果数据,可以修改起点Start、停止点Stop和时间步长Step数据获得更多的时刻点数据,然后点击Add to list增加到计算时刻点列表里,如下图所示 上图设定时间步长为0.001,也就是保存包括0时刻的11个时刻点的数据,这样我们能在在后面观察到0时刻的位置,观察磁钢轴线(D轴)和电机A相轴线的位置关系(在《ANSOFT仿真中的初始位置和编码器零点分析》中会详细讨论。 1.1 磁路结构和设计计算 永磁发电机与励磁发电机的最大区别在于它的励磁磁场是由永磁体产生的。永磁体在电机中既是磁源,又是磁路的组成部分。永磁体的磁性能不仅与生产厂的制造工艺有关,还与永磁体的形状和尺寸、充磁机的容量和充磁方法有关,具体性能数据的离散性很大。而且永磁体在电机中所能提供的磁通量和磁动势还随磁路其余部分的材料性能、尺寸和电机运行状态而变化。此外,永磁发电机的磁路结构多种多样,漏磁路十分复杂而且漏磁通占的比例较大,铁磁材料部分又比较容易饱和,磁导是非线性的。这些都增加了永磁发电机电磁计算的复杂性,使计算结果的准确度低于电励磁发电机。因此,必须建立新的设计概念,重新分析和改进磁路结构和控制系统;必须应用现代设计方法,研究新的分析计算方法,以提高设计计算的准确度;必须研究采用先进的测试方法和制造工艺。 1.2 控制问题 永磁发电机制成后不需外界能量即可维持其磁场,但也造成从外部调节、控制其磁场极为困难。这些使永磁发电机的应用范围受到了限制。但是,随着MOSFET、IGBTT等电力电子器件的控制技术的迅猛发展,永磁发电机在应用中无需磁场控制而只进行电机输出控制。设计时需要钕铁硼材料,电力电子器件和微机控制三项新技术结合起来,使永磁发电机在崭新的工况下运行。 1.3 不可逆退磁问题 如果设计和使用不当,永磁发电机在温度过高(钕铁硼永磁)或过低(铁氧体永磁)时,在冲击电流产生的电枢反应作用下,或在剧烈的机械振动时有可能产生不可逆退磁,或叫失磁,使电机性能降低,甚至无法使用。因而,既要研究开发适合于电机制造厂使用的检查永磁材料热稳定性的方法和装置,又要分析各种不同结构形式的抗去磁能力,以便在设计和制造时采用相应措施保证永磁式发电机不会失磁。 1.4成本问题 由于稀土永磁材料目前的价格还比较贵,稀土永磁发电机的成本一般比电励磁式发电机高,但这个成会在电机高性能和运行中得到较好的补偿。在今后的设计中会根据具体使用的场合和要求,进行性能、价格的比较,并进行结构的创新和设计的优化,以降低制造成本。无可否认,现正在开发的产品成本价格比目前通用的发电机略高,但是我们相信,随着产品更进一步的完美,成本问题会得到很好的解决。美国DELPHI(德尔福)公司的技术部负责人认为:“顾客注重的是每公里瓦特上的成本。”他的这一说法充分说明了交流永磁发电机的市场前景不会被成本问题困扰。 1.5永磁转子特点: 结构1: 并联磁场结构;转采用采用铸造压制而成,里面嵌放永磁体,能量大、重量轻、体积小、整体结构牢固可靠,最大工作转速大于15000转/分。 专利号;ZL96 2 47776.1 结构2: 串联磁场式结构;转子采用钢结构,表面按顺序嵌放永磁铁,转子表面磁通强、重量轻、体积小、整体结构牢固可靠,最大工作转速大于15000转/分。 专利号:ZL98 2 33864.3 整机稳压系统特点: 采用可控硅和二极管组成半控桥式整流电路。稳压系统是一种斩波调制型稳压装置,其稳压精度为正负0.1v,故该发电机具有能瞬间承受较大电流、运行可靠和耐用等特点,又因可直接利用发电机发出的交流电的反向电压使可控硅自行关断,故无需加关断电路,使电路结构简单、可靠。 2、永磁发电机的优点 现代电机设计 利用Ansoft软件对异步起动永磁同步电动 机的分析计算 2013 年7 月 目录 第1章引言………… 第2章 RMxprt在永磁同步电机中的电机性能分析………… 2.1 Stator项设置过程………… 2.2 Rotor项设置过程………… 2.3 Line Start-Permanent Magnet Synchronous Machine的电机仿真………… 2.4 计算和结果的查看………… 第3章静态磁场分析………… 3.1 电机模型和网格剖分图………… 3.2 磁力线分布图…………………… 3.3 磁密曲线 3.3.1 气隙磁密分布………… 3.3.2 定子齿、轭部磁密大小………… 3.3.3 转子齿磁密大小………… 第4章瞬态场分析………… 4.1 额定稳态运行性能………… 4.1.1 电流与转矩大小………… 4.1.2 各部分磁密………… 4.2 额定负载启动………… 4.2.1 转矩-时间曲线………… 4.2.2 电流-时间曲线………… 4.2.3 转速-时间曲线………… 4.2.4 转矩-转速曲线………… 第1章引言 Ansoft Maxwell作为世界著名的商用低频电磁场有限元软件之一,在各个工程电磁场领域都得到了广泛的应用。它基于麦克斯韦微分方程,采用有限元离散形式,将工程中的电磁场计算转变为庞大的矩阵求解。该软件包括二维求解器、三维求解器和RMxprt旋转电动机分析专家系统这3个主要模块,不仅可以进行静磁场、静电场、交直流传导电场、瞬态电场、涡流场、瞬态磁场等不同的基本电磁场的特性分析,还可以通过RMxprt电动机模块仿真多种电动机模型,为实际电动机设计提供帮助。利用Ansoft软件进行仿真可以帮助我们了解电动机的结构特性。 本文是一台4极、36槽绕组永磁同步电动机,利用RMxprt模块进行电机的建模、仿真以及导入到Maxwell2D的有限元模块的方法,然后再对Maxwell2D 中的永磁体模型进行修正,最后对该电机在静态磁场和瞬态磁场的情况下进行分析。 第5章动力学分析 结构动力学研究的是结构在随时间变化载荷下的响应问题,它与静力分析的主要区别是动力分析需要考虑惯性力以及运动阻力的影响。动力分析主要包括以下5个部分:模态分析:用于计算结构的固有频率和模态。 谐波分析(谐响应分析):用于确定结构在随时间正弦变化的载荷作用下的响应。 瞬态动力分析:用于计算结构在随时间任意变化的载荷作用下的响应,并且可涉及上述提到的静力分析中所有的非线性性质。 谱分析:是模态分析的应用拓广,用于计算由于响应谱或PSD输入(随机振动)引起的应力和应变。 显式动力分析:ANSYS/LS-DYNA可用于计算高度非线性动力学和复杂的接触问题。 本章重点介绍前三种。 【本章重点】 ?区分各种动力学问题; ?各种动力学问题ANSYS分析步骤与特点。 5.1 动力学分析的过程与步骤 模态分析与谐波分析两者密切相关,求解简谐力作用下的响应时要用到结构的模态和振型。瞬态动力分析可以通过施加载荷步模拟各种何载,进而求解结构响应。三者具体分析过程与步骤有明显区别。 5.1.1 模态分析 1.模态分析应用 用模态分析可以确定一个结构的固有频率利振型,固有频率和振型是承受动态载荷结构设计中的重要参数。如果要进行模态叠加法谐响应分析或瞬态动力学分析,固有频率和振型也是必要的。可以对有预应力的结构进行模态分析,例如旋转的涡轮叶片。另一个有用的分析功能是循环对称结构模态分析,该功能允许通过仅对循环对称结构的一部分进行建模,而分析产生整个结构的振型。 ANSYS产品家族的模态分析是线性分析,任何非线性特性,如塑性和接触(间隙)单元,即使定义也将被忽略。可选的模态提取方法有6种,即Block Lanczos(默认)、Subspace、Power Dynamics、Reduced、Unsymmetric、Damped及QR Damped,后两种方法允许结构中包含阻尼。 2.模态分析的步骤 (一) PMSM 的数学模型 交流电机是一个非线性、强耦合的多变量系统。永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上。在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的。为了简化永磁同步电机的数学模型,我们通常做如下假设: 1) 忽略电机的磁路饱和,认为磁路是线性的; 2) 不考虑涡流和磁滞损耗; 3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势, 忽略气隙中的高次谐波; 4) 驱动开关管和续流二极管为理想元件; 5) 忽略齿槽、换向过程和电枢反应等影响。 永磁同步电机的数学模型由电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下: (l)电机在两相旋转坐标系中的电压方程如下式所示: d d s d d c q q q s q q c d di u R i L dt di u R i L dt ωψωψ?=+-????=++?? 其中,Rs 为定子电阻;ud 、uq 分别为d 、q 轴上的两相电压;id 、iq 分别为d 、q 轴上对应的两相电流;Ld 、Lq 分别为直轴电感和交轴电感;ωc 为电角速度;ψd 、ψq 分别为直轴磁链和交轴磁链。 若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相 静止坐标系的变换,如下式所示。 cos sin 22 cos()sin() 33 22 cos()sin() 33 a d b q c u u u u u θθ θπθπ θπθπ ?? ? - ??? ?? ?? =--- ? ?? ?? ?? ?? ? +-+ ?? (2)d/q轴磁链方程: d d d f q q q L i L i ψψ ψ =+ ?? ? = ?? 其中,ψf为永磁体产生的磁链,为常数,0 f r e ω ψ=,而c r p ω ω=是机械角速度,p为同步电机的极对数,ωc为电角速度,e0为空载反电动势,其值为每项 倍。 (3)转矩方程: 3 2 e d q q d T p i i ψψ ?? =- ?? 把它带入上式可得: 3 () 2 33 () 22 e f q d q d q f q d q d q T p i L L i i p i p L L i i ψ ψ ?? =+- ?? =+- 对于上式,前一项是定子电流和永磁体产生的转矩,称为永磁转矩;后一项是转子突极效应引起的转矩,称为磁阻转矩,若Ld=Lq,则不存在磁阻转矩,此时,转矩方程为: 3 2 e f q t q T p i k i ψ == 这里, t k为转矩常数, 3 2 t f k pψ =。 完全法 完全法采用完整的系统矩阵计算瞬态响应(没有矩阵缩减)。它是三种方法中功能最强的,允许包括各类非线性特性(塑性、大变形、大应变等)。 注─如果并不想包括任何非线性,应当考虑使用另外两种方法中的一种。这是因为完全法是三种方法中开销最大的一种。 完全法的优点是: ·容易使用,不必关心选择主自由度或振型。 ·允许各种类型的非线性特性。 ·采用完整矩阵,不涉及质量矩阵近似。 ·在一次分析就能得到所有的位移和应力。 ·允许施加所有类型的载荷:节点力、外加的(非零)位移(不建议采用)和单元载荷(压力和温度),还允许通过TABLE数组参数指定表边界条件。 ·允许在实体模型上施加的载荷。 完全法的主要缺点是它比其它方法开销大。 §3.4 完全法瞬态动力学分析 首先,讲述完全法瞬态动力学分析过程,然后分别介绍模态叠加法和缩减法与完全法不相同的计算步骤。完全法瞬态动力分析(在ANSYS/Multiphsics、ANSYS/Mechauioal及ANSYS/Structural中可用)由以下步骤组成: 1.建造模型 2.建立初始条件 3.设置求解控制 4.设置其他求解选项 5.施加载荷 6.存储当前载荷步的载荷设置 7.重复步骤3-6定义其他每个载荷步 8.备份数据库 9.开始瞬态分析 10.退出求解器 11.观察结果 § 型 在这一步中,首先要指定文件名和分析标题,然后用PREP7定义单元类型,单元实常数,材料性质及几何模型。这些工作在大多数分析中是相似的。< 鼠笼型转子三相异步电动机电磁计算说明 一、 主要性能数据 1. 电动机五个重要的性能指标 效率[η]、功率因数[?cos ]、最大转矩倍数[st T ]、堵转转矩倍数[st T ]、堵转电流倍数[st I ]。 2. 电动机的额定值 额定功率:电动机在额定情况运行下,由轴端输出的机械功率,单位kW 。 额定电压:电动机额定运行时外加于定子绕组上的线电压,单位V 。 额定频率:电动机额定运行时电网频率,单位Hz 。 额定电流:电动机在额定电压、额定频率下、轴端有额定功率输出时,通过定子绕组的 线电流单位A 。 额定转速:电动机在额定电压、额定频率下、轴端有额定功率输出时,转子的转速,单 位min /r 。 3. 在电磁计算中什么是标幺值?怎么表示? 标幺值是一种比值,它表示的是实际值与基值的比例关系。一般按下面的方法表示。如 定子相电流1I 的表么值用' 1i 表示,KW I I i 1' 1= 。 4. 为什么在电磁计算中要使用标幺值? 在电磁计算中采用标幺值不但可以方便计算,又可清楚的反映各参数之间的关系。 5. 电磁计算中基值有那些。 功率基值:额定输出功率2P ,单位kW 电压基值:额定相电压1U ,单位V 电流基值:功电流KW I ,单位A 阻抗基值: KW I U 1 ,单位Ω 6. 输出功率的计算过程 ηφ????=112cos 3U I P (相电压每相电流、11U I ) 因为,Y 接时13U U N ?=,△接时13I I N ?=(用相量计算可证明) 故:ηφ????=cos 32N N I U P 7. 功电流的计算 功电流:1 3 2310U P I KW ??= ,单位A 。 二、 三相交流绕组 1. 对三相交流绕组的要求 a. 在一定的导体数下,获得较大的基波电势和基波磁势。 b. 三相电势和磁势必须对称,即三相大小相等相位互差?120。 c. 电势和磁势波形尽可能接近正弦波,谐波分量要小。 d. 用铜量少,绝缘性能和机械性能可靠。 2. 三相绕组的分类 a. 按槽内层数分类,可分为双层绕组和单层绕组。 b. 按每极每相槽数分类,可分为整数槽绕组和分数槽绕组。 c. 按排列方式可分为,双层绕组可分为迭绕组、波绕组;单层绕组可分为等元件 绕组、单层交叉绕组和单层同心绕组。 3. 每极每相槽数q 为了使三相电势相等,每相在每极下应占有相等的槽数,该槽数成为每极每相槽数。一般用q 表示,p m Z q ?= (Z 为槽数,p 为极数)。q 可以是整数,也可以是分数。q 为分数时c b a q =中c 不能是3或3的倍数。 4. 最大并联支路数a 对于整数槽p a =max ,对于分数槽c b a q =,c p a =max 。 5. 极距τ和节距y 极距p Z = τ(槽),当线圈的节距τ=y 时成为等距绕组,当τ永磁同步电机基础知识
永磁直流电机设计
电机设计计算常用公式
永磁同步电机计算
无刷直流永磁电动机设计流程和实例
同步电机电磁部分计算
永磁电机由磁路计算到瞬态场的仿真步骤
永磁电机磁路结构和设计计算
Ansoft永磁同步电机 设计 报告
ANSYS动力学分析
永磁同步电机基础的知识
ANSYS动力学瞬态分析完全法
电机电磁计算说明