机电一体化技能竞赛试题(中职)
职业技术学校技能大赛
电工电子类
机电一体化设备组装与调试比赛
XX生产设备组装与调试
(中职学生)
任
务
书
2011年1月
说明:
一、本试卷依据2010’江苏省职业技术学校技能大赛电工电子类实施方案的要求和2001年颁布的《维修电工高级》国家职业标准命制;
二、请参赛选手仔细阅读试题的具体考核要求,并按要求完成操作或进行笔答; 三、操作技能竞赛时要遵守考场纪律,服从赛场管理人员指挥,以保证竞赛安全顺利进行。
工作任务与要求
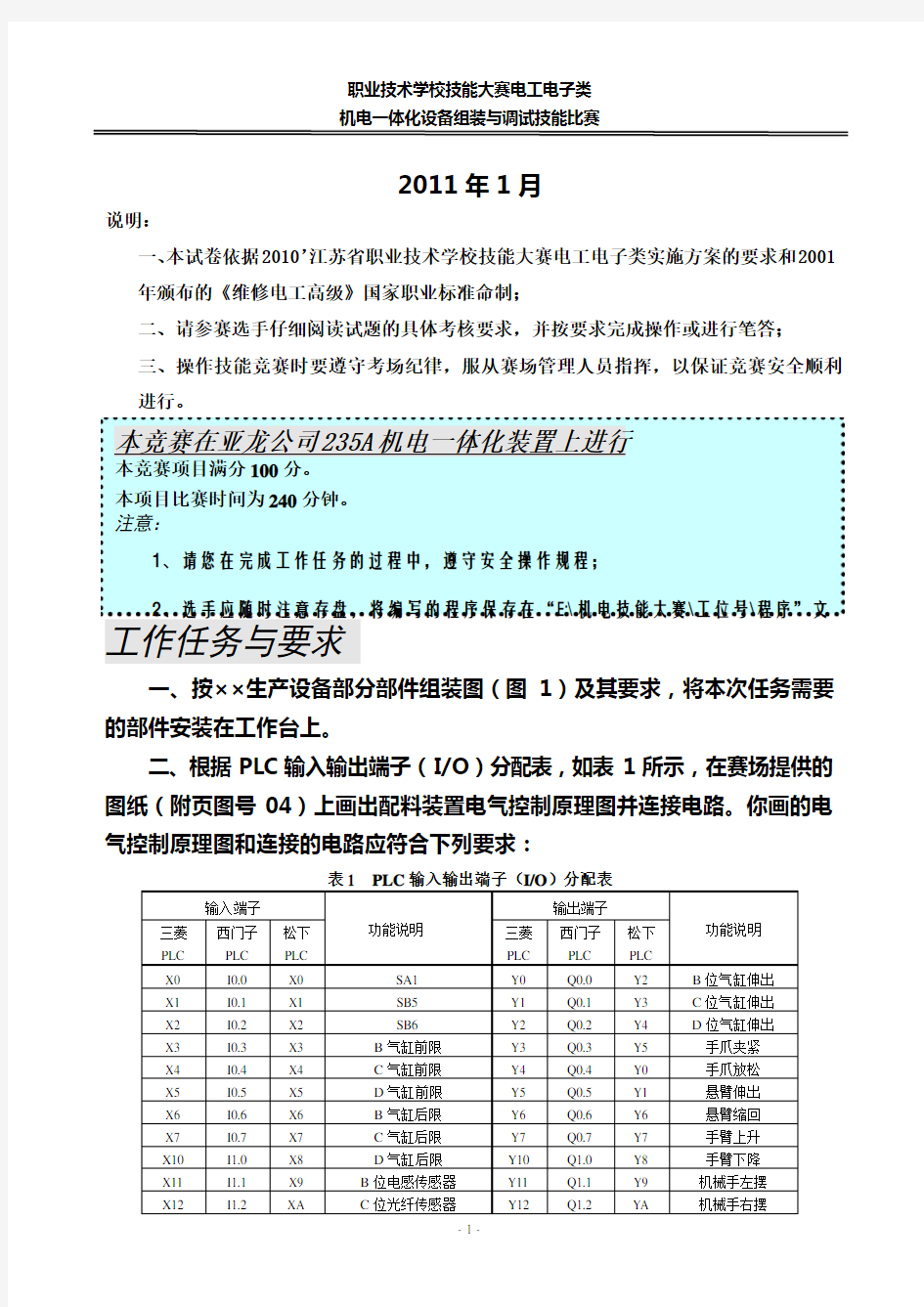
一、按××生产设备部分部件组装图(图1)及其要求,将本次任务需要的部件安装在工作台上。
二、根据PLC 输入输出端子(I/O )分配表,如表1所示,在赛场提供的图纸(附页图号04)上画出配料装置电气控制原理图并连接电路。你画的电气控制原理图和连接的电路应符合下列要求:
表1 PLC 输入输出端子(I/O )分配表
输入端子
功能说明
输出端子 功能说明
三菱 PLC 西门子 PLC 松下 PLC 三菱 PLC 西门子 PLC 松下 PLC X0 I0.0 X0 SA1 Y0 Q0.0 Y2 B 位气缸伸出 X1 I0.1 X1 SB5 Y1 Q0.1 Y3 C 位气缸伸出 X2 I0.2 X2 SB6 Y2 Q0.2 Y4 D 位气缸伸出 X3 I0.3 X3 B 气缸前限 Y3 Q0.3 Y5 手爪夹紧 X4 I0.4 X4 C 气缸前限 Y4 Q0.4 Y0 手爪放松 X5 I0.5 X5 D 气缸前限 Y5 Q0.5 Y1 悬臂伸出 X6 I0.6 X6 B 气缸后限 Y6 Q0.6 Y6 悬臂缩回 X7 I0.7 X7 C 气缸后限 Y7 Q0.7 Y7 手臂上升 X10 I1.0 X8 D 气缸后限 Y10 Q1.0 Y8 手臂下降 X11 I1.1 X9 B 位电感传感器 Y11 Q1.1 Y9 机械手左摆 X12 I1.2 XA C 位光纤传感器 Y12 Q1.2 YA 机械手右摆 X13 I1.3 XB D 位光纤传感器 Y13 Q1.3 YB 直流电机 X14 I1.4 XC 皮带光电传感器 Y14 Q1.4 YC 电机正转 X15
I1.5
XD
手爪夹紧信号
Y15
Q1.5
YD
电机反转 本竞赛在亚龙公司235A 机电一体化装置上进行
本竞赛项目满分100分。
本项目比赛时间为240分钟。 注意: 1、请您在完成工作任务的过程中,遵守安全操作规程; 2、选手应随时注意存盘,将编写的程序保存在“E:\机电技能大赛\工位号\程序”文
X16 I1.6 XE 手臂上限位Y16 Q1.6 YE 25Hz
X17 I1.7 XF 手臂下限位Y17 Q1.7 YF 16Hz
X20 I2.0 X10 前臂前限位Y20 Q2.0 Y10 HL1
X21 I2.1 X11 前臂后限位Y21 Q2.1 Y11 HL2
X22 I2.2 X12 旋转左限位Y22 Q2.2 Y12 HL3
X23 I2.3 X13 旋转右限位Y23 Q2.3 Y13 HL4
X24 I2.4 X14 接料台信号Y24 Q2.4 Y14 HL5
X25 I2.5 X15 SB1 Y25 Q2.5 Y15 蜂鸣器
X26 I2.6 X16 SB2 Y26 Q2.6 Y16 绿色警示灯
X27 I2.7 X17 SB3 Y27 Q2.7 Y17
1. 电气控制原理图中各元器件的图形符号,按“关于2008年全国中等职业学校电工电子技术技能大赛机电一体化设备组装与调试竞赛项目使用统一图形符号的通知”…教职成司函…2008?31号?中指定的图形符号绘制。通知中没有指定图形符号的元器件,可自行编定其图形符号,但要在电气控制原理图中用图例的形式予以说明。
2. 凡是你连接的导线,必须套上写有编号的编号管。交流电机金属外壳与变频器的接地极必须可靠接地。
3. 工作台上各传感器、电磁阀控制线圈、送料直流电机、警示灯的连接线,必须放入线槽内;为减小对控制信号的干扰,工作台上交流电机的连接线不能放入线槽。
三、根据气动系统图及其要求和说明,连接××生产设备的气路。
四、根据触摸屏的要求编写触摸屏画面,并能按要求正确操作和显示。
五、请你正确理解设备的正常工作过程和故障状态的处理方式,编写××生产设备的PLC控制程序和设置变频器的参数。
六、请你调整传感器的位置和灵敏度,调整机械部件的位置,完成××生产设备部分部件整体调试,使该设备能按要求完成各工序的规定任务。
图2
悬臂
手臂
手指
气动马达
立柱
右限止位置
左限止位置
××生产设备及其调试要求
一、系统的上电检测和处理
1、部件的初始位置 启动前,设备的运动部件必须在规定的位置,这些位置称作初始位置。有关部件的初始位置是:
机械手的悬臂靠在右限止位置并处于缩回状态,手臂气缸的活塞杆缩回,手指松开。
位置A 、B 、C 的气缸活塞杆缩回。
处理盘、皮带输送机的拖动电动机不转动。
2、上电检测
初次上电(设备前次断电前处于非运行状态)时,要进行断电检测,上电3S之后,若上述部件在初始位置,绿色警示灯闪烁,表示系统准备好,可以进行试运行。若上述部件不在初始位置,绿色警示灯熄灭,由HL2、HL3、HL4、HL5四盏指示灯按二进制来表示不在初始位置的部件的个数,系统不能启动。需要通过复位按钮SB6来复位,如果在5S之内没有进行复位操作,则蜂鸣器鸣叫(3HZ)3S,如果仍然没有复位,则后面每隔3S鸣叫一次,提示复位,复位按钮为SB6。如果15秒之内仍然没手动复位,则系统自动执行复位操作进行复位,其复位动作步骤请按安全操作规范自行确定,设备回到初始位置后绿色警示灯闪烁。
3、系统试运行
初次上电(设备前次断电前处于非运行状态)时,系统在初始位置时进行试运行后才能启动,系统试运行的流程请自行设备,要求完成所有需要驱动的部件都工作一次或一次以上。如果输送带上在试运行时有物料,则马上进入物料紧急处理过程,把物料输送到C处滑槽内,然后重新继续剩下的系统试运行流程,并保证试运行结束后,设备在初始位置,绿色警示灯亮。
如果上述2项检测均已通过,可再次按下SB6按钮,这时绿色警示灯熄灭,改为指示灯HL1以亮1秒,灭0.5秒的方式闪亮,表示系统已经准备好,等待启动。
二、检测组装
设备进入等待状态后,若SA1位于右位置,则按下SB5启动按钮,系统起动进入检测组装工作,同进HL1常亮。送料电机转动,在送料平台的光电传感器检测到有工件时,送料电机停止转动,工件在平台上进行2秒材质检测,检测材质由操作SB2来确定,若在2秒内没有操作SB2,则该工件为金属,若在2秒内按下过一次,则该工件为白色塑料工件,若在2秒内按下过2次SB2,则该工件为黑色塑料工件。工件检测结束后,气动机械手悬臂伸出→手臂下降→气爪将工件夹紧。夹紧1s后,手臂上升→悬臂缩回→转动至右侧极限位置→然后悬臂伸出→手臂下降到位0.3秒→气爪放松,将工件放到皮带输送机的
传送带的进料孔上,手臂上升→悬臂缩回→转动至左侧极限位置。若送料平台上有料则重复上述过程(当平台无料后,送料电机即可送出下一个物料)。
送料要求:机械手可连续不断地往皮带输送机上搬运物料,并要求调节机械手的各气缸的动作速度,确保能看到皮带输送机上能出现3个料的情况。并且皮带输送机的运行方向只能有一个。
组装要求:
1.B、C、D三处滑槽的组合都有两种方式供选择,分别通过SB1、SB2、SB3来设定,当SA1置于右位置时,若启动时设定按钮处于按下状态,则选择方式1,否则选择方式2,一旦启动后,组合方式选择不能再改变,只有等下次启动前才能再次设定。
2.启动后分别用HL2、HL3、HL4长亮分别指示B、C、D处滑槽选择了组合方式1,用HL2、HL3、HL4以1Hz闪烁分别指示B、C、D处滑槽选择了组合方式2。
3.B处滑槽组合方式1为“白/金/白”的顺序,组合方式2为“金白”的无顺序组合;
4.C处滑槽组合方式1为“黑/金/黑”的顺序,组合方式2为“金黑”的无顺序组合;
5.D处滑槽组合方式1为“金/白/黑”的顺序,组合方式2为“黑/金/白”的顺序组合;
6.每次组装分拣的优先顺序为B处滑槽、C处滑槽、D处滑槽;
7.当皮带上的工件都不满足组装分拣要求时,从皮带的左侧滑出。
8.皮带上有工件时,皮带以16Hz速度运行。
包装要求:
当任意一个滑槽完成一完整的组装要求时,设备暂停,用对应组合方式指示灯以4Hz频率快闪2秒来指示该滑槽正在包装,包装结束后继续。
停止要求:
按下停止按钮SB6后,设备在处理完已经到送料平台上的工件后停止在初
始位置。
三、加工分拣
设备进入等待状态后,若SA1位于左位置,则按下SB5启动按钮,HL5长亮,HL1以1Hz频率闪亮,系统起动进入加工分拣工作。送料电机转动,在送料平台的光电传感器检测到有工件时,送料电机停止转动,气动机械手悬臂伸出→手臂下降→气爪将工件夹紧。夹紧1s后,手臂上升→悬臂缩回→转动至右侧极限位置→然后悬臂伸出→手臂下降→气爪放松,将工件放到皮带输送机的传送带的进料孔上,手臂上升→悬臂缩回→转动至左侧极限位置。当平台无料后,送料电机即可送出下一个物料。
当皮带输送机右放料位置的漫射型光电传感器检测到工件后,拖动皮带输送机的交流电动机启动前进传送工件,皮带机正转频率为16Hz,反转频率为25Hz。
要求:
(1)放料要求:皮带上连续放两个工件,机械手将第一个工件放入进料孔,机械手回原位继续抓工件至进料孔,当第一个工件运行到B位停止加工过程中,机械手可通过进料孔放入第二个工件,当皮带光电传感器检测到第二个工件时,HL5熄灭。
(2)通过“金属工件预置”键SB1、SB2来设置金属件的个数,通过SB1使预置数增加,通过SB2使预置数减少,但设定个数范围在1-8之间,超过范围设定键操作无效。当系统检测加工的金属件数与预置的数字相同时,系统在处理完离开送料平台的工件后停机,并由HL2、HL3、HL4三盏指示灯来指示系统停止前需要检测加工的金属件数。预置数在SA1置于左位置,系统处于等待状态时才能设定(检查时按评委要求设定),一旦设定后只有重新设定才能改变。
(3)加工要求:在第一个工件到达B位后,皮带停止,进行第一道工序加工5S(此时第二个工件已被放入进料孔);然后皮带输送机继续运行到C位后,皮带停止,对第一个工件进行第二道工序加工5S,同时第二个工件也到
达B位进行第一工序加工;然后皮带输送机再运行到D位后,皮带停止,对第一个工件进行第三道工序加工5S,恰好第二个工件也到达C位进行第二道工序加工。
(4)分拣要求:当第一个工件加工完毕后,进行工件的检测,将金属件推入D位溜槽,白色塑料件推入C位溜槽,黑色塑料件推入B位溜槽。第一个工件分拣完毕,皮带上的第二个工件直接运行到D位进行第三道工序加工,加工完毕后按以上分拣要求进行分拣,第二个工件分拣结束后,HL5亮,表示设备准备又一次进行将工件加工分拣。
为了保证设备的工作,当皮带上有两个工件后,必须等这两个工件分拣完毕后,即HL5亮时,机械手才能向传送带的进料孔放工件。
四、意外情况处理:
1.意外断电
设备在正常运行过程中断电称为意外断电,当发生意外断电后再上电时,HL5以亮1s灭1s的方式闪烁,再次按下SB5,则设备接着断电前的工作继续,但加工分拣方式断电时,若正在加工,则正在加工的工件要作为废品处理,从传送带左侧传出;检测组装方式断电时若正在进行材质检测,则要重新进行材质检测。
2.抓料不可靠处理
机械手在抓取工件时没抓到料或抓料后在中途掉下,则设备立刻停止,蜂鸣器报警,当按下SB5后,机械手以安全方式再次抓料后继续工作。
3.送料不及时报警
在加工分拣过程中,若前一工件在B位加工结束后,后一工件还没有按要求放到皮带上,或在检测组装的送料过程中,当前一工件放到皮带上6秒后,后一工件还没有放到皮带上,则皮带暂停,同时蜂鸣器连续短鸣报警,提示操作人员检查送料盘内是否无料及机械手动作是否太缓慢,若无料立刻加料,若是机械手动作太缓慢,则要按一下SB5让机械手暂停,然后调节好机械手的速度后再按一下SB5再继续,当把工件放到皮带上后,停止报警,设备继续工作。
四、触摸屏要求说明:
1、指示灯在三个页面中都有显示,所有按钮在触摸屏第一页显示,在此页面上方显示“职业学校电工电子类技能大赛机电一体化项目比赛”日期工号。
2、第一页设置页面转换键“检测组装”进入第二页和“加工分拣”进入第三页。
3、在第二页显示检测组装工作方式,统计不符合组装要求的工件占总工件数的百分比和每个槽完成的组装数量和组合方式;并显示每个斜槽一个完整组装还缺少的工件,如在开始工作时若B处槽选择了组合方式1,则开始显示:B处槽:白金白;如果有一个白色工件进入B处槽,则显示:B处槽:金白;以此类推;若B处槽选择了组合方式2,则开始显示:B处槽:金白;如果有一个白色工件进入B处槽,则显示:B处槽:金;以此类推。设置清零键,当按一下清零键时,所有的数据统计重新开始。并在第二页右下角设置页面转换键“返回”,用以返回第一页。
4、在第三页显示加工分拣工作方式,显示金属预置数量和各滑槽内的工件数量,并在第三页右下角设置页面转换键“返回”,用以返回第一页。
机电一体化系统设计试题及答案:-
一、名词解释(每小题2分,共10分) 1. 测量 2.灵敏度 3. 压电效应 4. 动态误差 5. 传感器 二、填空题(每小题2分,共20分) 1. 滚珠丝杆中滚珠的循环方式:_内旋换和外循环 2. 机电一体化系统,设计指标和评价标准应包括___ _______,__________, __________ ,__________。 3. 顺序控制系统是按照预先规定的次序完成一系列操作的系统, 顺序控制器通常用________。 4. 某光栅的条纹密度是50条/mm,光栅条纹间的夹角θ=0.001孤度, 则莫尔条纹的宽度是_______________________。 5. 连续路径控制类中为了控制工具沿任意直线或曲线运动,必须同时控制 每一个轴的______________________,使它们同步协调到达目标点。 6. 某4极交流感应电机,电源频率为50Hz,转速为1470r/min,则转差率为_____________。 7. 齿轮传 动的总等效惯量与传动级数__________________________________________。 8. 累计式定时器工作时有_____________________________________________________。 9. 复合控制器必定具有__________________________________。 10. 钻孔、点焊通常选用_______________________________________类型。 三、选择题(每小题2分,共10分) 1. 一般说来,如果增大幅值穿越频率ωc的数值,则动态性能指标中的调整时间ts ( ) A. 产大 B. 减小 C. 不变 D. 不定 2. 加速度传感器的基本力学模型是 A. 阻尼—质量系统 B. 弹簧—质量系统弹簧—阻尼系统 D. 弹簧系统 3. 齿轮传动的总等效惯量与传动级数( ) A. 有关 B. 无关 C. 在一定级数内有关 D. 在一定级数内无关 4. 顺序控制系统是按照预先规定的次序完成一系列操作的系统,顺序控制器通常用( ) A. 单片机 B. 2051 C. PLC 5、伺服控制系统一般包括控制器、被控对象、执行环节、比较环节和检测环节等个五部分。 A 换向结构 B 转换电路 C 存储电路D检测环节 四、判断题(每小题2分,共10分) 1、伺服控制系统的比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号。(? ) 2、电气式执行元件能将电能转化成机械力,并用机械力驱动执行机构运动。如交流电机、直流电机、 力矩电机、步进电机等。() 3、对直流伺服电动机来说,其机械特性越硬越好。(? ) 4、步进电机的步距角决定了系统的最小位移,步距角越小,位移的控制精度越低。() 5、伺服电机的驱动电路就是将控制信号转换为功率信号,为电机提供电能的控制装置,也称其为变流 器,它包括电压、电流、频率、波形和相数的变换。(? ) 五、问答题(每小题10分,共30分) 1. 步进电动机常用的驱动电路有哪几种类型? 2. 什么是步进电机的使用特性? 3. 机电一体化系统设计指标大体上应包括哪些方面? 一、名词解释(每小题2分,共10分) 1. 是人们借助于专门的设备,通过一定的方法对被测对象收集信息,取得数据概念的过程。 2. 指在稳态下,输出的变化量ΔY与输入的变化量ΔX的比值。即为传感器灵敏度。
2011中职计算机网络技能大赛模拟试题(一)
计算机应用技能大赛试卷 企业网络搭建及应用 一、注意事项 1、检查硬件设备、网线头和Console线等的数量是否齐全,电脑设备是否正常。 2、自带双绞线制作和验证测试工具。禁止携带和使用移动存储设备、运算器、通信工具及参考资料。 3、操作完成后,需要保存设备配置,不要关闭任何设备,不要拆动硬件的连接,不要对设备随意加、密码,试卷留在考场。 4、赛场准备的比赛所需要竞赛设备、竞赛软件和竞赛材料等。 二、竞赛环境 硬件环境 软件环境
三、网络拓扑 某集团公司全国有两家分公司,总公司设在北京,分公司分别设在上海和天津。总公司使用专用链路与两分公司相连组成城域网。在全网使用的动态路由OSPF 路由协议。总公司与上海分公司都申请了访问互联网的链路,但天津分公司没有申请互联网链路,其使用总公司的链路访问互联网。在上海分公司部署的是无线网络,用户通过无线网络访问互联网。如果您是这个网络项目的网络工程师,可根据下面的需求构建一个安全、稳定的网络 如下图所示:
三、IP规划 四.试题内容 (一)网络系统构建(70分) 1.北京总公司 (1)网络底层配置(4分) 根据网络拓扑图所示,对网络设备的各接口、VLAN等相关信息进行配置,使其能够正常通讯。 (2)路由协议配置(4分)
?根据网络拓扑图所示,配置动态路由协议OSPF ,并需要指定RID。 (3)网络出口配置(8分) ?根据网络拓扑图所示,配置NAT技术,使用内部VLAN10、VLAN20用户可以 使用外部接口的IP地址访问互联。 ?根据网络拓扑图所示,允许天津分公司VLAN30、VLAN40的用户通过总部的 路由器访问互联外,并使用合法的全局地址为181.1.1.2~181.1.1.4。 ?根据网络拓扑图所示,将总部的服务器WEB服务和FTP发布的互联,其合法 的全局地址为181.1.1.5 (4)链路安全(4分) ?根据网络拓扑图所示,为了保障总公司与分公司链路安全,需要在总公司与城 域网连接的链路上配置PPP协议,并采先CHAP后PAP的验证方式,并将总公司路由器设置为验证方,其口令为ruijie。 (5)接入层配置(4分) ?根据网络拓扑图所示,将接口加入到相应的VLAN中。 ?根据网络拓扑图所示,对所有的接入接口配置端口安全,如果有违规者,是关 闭接口,并要求接口配置为速端口。 2.天津分公司 (1)网络底层配置(4分) ?根据网络拓扑图所示,对网络设备的各接口、VLAN等相关信息进行配置,使 其能够正常通讯。 (2)路由协议配置(4分) ?根据网络拓扑图所示,配置动态路由协议OSPF ,并需要指定RID。 (3)单臂路由配置(4分) ?根据网络拓扑图所示,配置单臂路由,使用网络互通。 (4)接入层配置(4分) ?根据网络拓扑图所示,将接口加入到相应的VLAN中。 ?对所有的接入接口配置端口安全,如果有违规者,是关闭接口,并要求接口配 置为速端口。
机电一体化考试试卷A卷
机电一体化考试试卷 A卷 一. 名词解释 1. 接口——机电一体化系统中各子系统之间进行物质、能量和信息传递与交换的联系部件。 2. 连续控制系统——信号在时间上是连续变化的系统。 3. 计算机控制系统——采用计算机作为控制器的控制系统即为计算机控制系统,又被称为离散控制系统。 5. 直流伺服系统——采用直流伺服电动机作为执行元件的伺服系统。 8. 同步调制——在改变正弦调制波的频率f的同时成正比的改变三角载波的频率f c,使载频比N保持不变,则称为同步调制。 9. 异步调制——在改变正弦调制波的频率f的同时,三角载波的频率f c的值保持不变,使载频波比N值不断变化,则称为异步调制。 11. 抗干扰技术——研究电子设备及系统抵抗外部和内部电磁干扰,保证其正常工作的具体措施。 12. 工业机器人——一种能自动定位控制、可重复编程的、多功能的、多自由度的操作机。能搬运材料、零件或操作工具,用以完成各种作业。 二. 填空 1. 接口的基本功能有三个,一是交换,通过接口完成信号模式或能量的统一,二是放大,达到能量的匹配,三是传递,遵循协调一致的时序,信号格式和逻辑规范将放大后的信号可靠.快速.精确地交换。 3. 在机电一体化系统中,机械结构主要用于执行机构、传动机构和支承部件,用以完成规定的动作;传递功率、运动和信息;起支承连接作用等。通常,它们是微机控制伺服传动系统的有机组成部分。 4. 对机电一体化系统中的机械传动系统建模一般分两步进行,首先把机械系统中各基本物理量折算到传动链中的某个元件上,然后,再根据输入量和输出量的关系建立它的数学模型。 6. 由于非线性摩擦的存在,机械系统在低速运行时,常常出现爬行现象,导致系统运行不稳定。爬行一般出现在某个临界转速以下,而在高速运行时并不出现。 7. 惯量的适当增大只有在改善低速爬行时有利。因此,机械设计时,在不影响系统刚度的条件下,应尽量减小惯量。 10. 一般来说,伺服系统的基本组成可包括控制器、功率放大器、执行机构和检测装置等四大部分。 11. 常用的伺服电动机有直流伺服电动机、交流伺服电动机、步进电动机三种。 14. 若系统的输出量为速度,将此速度反馈到输入端,并与输入量比较,就可以实现对系统的速度控制,这种控制系统称为速度伺服控制系统。 17. 单片微计算机是将CPU 、RAM 、ROM 、定时/计数、多功能I/O(并行、
机电一体化期末总复习试题含答案
填空题 1. 机电一体化技术的内涵是微电子技术和机械技术渗透过程中形成的一个新概念。 2. 机电一体化系统(产品)是机械技术和微电子技术的有机结合。 3. 工业三大要素是物质、能量、信息;机电一体化工程研究所追求的三大目标是:省能源、省资源、智能化。 4. 机电一体化研究的核心技术是接口问题。 5. 机电一体化系统(产品)构成的五大部分(或子系统)是:机械系统、电子信息处理系统、能源系统、传感信息系统、执行控制系统。 6. 机电一体化接口按输入/输出功能分类机械接口、物理接口、信息接口、环境接口。 7. 机电一体化系统(产品)按设计类型分为:开放性设计、适应性设计、变异性设计。 8. 机电一体化系统(产品)按机电融合程度分为机电一体化系统(产品)按机电融合程度分为:机电互补法、机电结合(融合)法、机电组合法。 9. 机电一体化技术是在机械的主功能、动力功能、信息功能、控制功能基础上引入微电子技术,并将机械装置与电子装置用相关软件有机地结合所构成系统的总称。 10.机电一体化系统实现三大功能应具有的两大重要特征(转换作用方式): 以能源转换为主和以信息转换为主。 11. 丝杠螺母机构的基本传动形式有:螺母固定丝杆转动并移动、丝杆转动螺母移动、螺母转动丝杆移动、丝杆固定螺母转动并移动四种形式种形式。 12. 滚珠丝杠副按螺纹滚道截面形状分为单圆弧和双圆弧两类;按滚珠的循环方式分为外循环和内循环两类。 13. 滚珠丝杠副轴向间隙调整与预紧的基本方法有:双螺母螺纹预紧调整、双螺母齿差预紧调整、双螺母垫片调整预紧、弹簧自动调整预紧四种方式。14. 滚珠丝杠副常选择的支承方式有:单推——单推式、双推——双推式、双推——简支式、双推——自由式。 15. 机电一体化系统(产品)常用齿轮传动形式有定轴轮系、行星轮系和谐波轮系三种形式三种形式。 16. 在机电一体化系统机械传动中,常用的传动比分配原则有:重量最轻原则、转动惯量最小原则、传动精度最优原则等。 17. 常用导轨副的截面形式有:三角形导轨、矩形导轨、燕尾形导轨、圆形导轨四种形式。 18. 导轨刚度主要指:结构刚度、接触刚度和局部刚度。 19. 机电一体化系统(产品)中,常可选择的执行元件:电磁式、液压式、气压式和其他形式的执行元件。 20. 电动机的工作特性分为恒转矩工作和恒功率工作两个阶段,其转折点的转速和功率分别称为:额定转速和额定功率;伺服电动机用于调速控制时,应该工作在恒转矩工作阶段。 21. 步进电机按转子结构形式可分为:反应式(变磁阻式)步进电机、永磁式步进电机、混合式步进电机三种。 22. 步进电机的工作方式有:单拍工作方式和倍拍工作方式。
中职技能大赛电子技能模拟试题
中职技能大赛电子技能模拟试题 “模拟自动洗车控制器”电路功能简介 一、功能说明 自动洗车控制器主要由车辆检测电路、光线检测电路、单片机控制电路、显示电路、指示电路组成。自动洗车控制器可以实现自动洗车,并有三档洗车速度可供选择。 二、电路功能简介 按键说明: S1——慢速洗车按键 S2——中速洗车按键 S3——快速洗车按键 S4——开始/强制结束洗车按键 模拟功能简介: 1)数码管开机默认显示,当检查到有车,LED2点亮,蜂鸣器发出“滴—滴”两声提示。在LED2亮的情况下,先按下S1~S3中任意一按键选择洗车速度(S1:慢速洗车、S2:中速洗车、S3:快速洗车,如选择的是S1——慢速洗车,数码管显示 ;如选择的是S2——中速洗车,数码管显示;如选择的是 S3——快速洗车,数码管显示;若未按下S1~S3中任意一按键(即未选 择洗车速度),数码管将显示,默洗车时间为25s),如果再按下S4开始模拟洗车,同时继电器吸合,数码管的时间将依次递减。LED3~LED6的动作代表刷车状态:LED3~LED6向下流水(正刷),LED7点亮,LED8熄灭,LED3~LED6向下流水两次后,LED3~LED6开始向上流水(反刷),LED7熄灭,LED8点亮,LED3~LED6向上再流水两次,如此交替往复。 当洗车完成时,时间减到0,此时数码管显示,同时继电器松开,LED3~ LED8全部点亮,接着按一定规律闪烁,蜂鸣器发出二次“嘀——滴—滴”的声音,提示洗车完成。然后又回到初始状态,等待下次洗车。 2)如果在洗车过程中,车突然离开,则LED3~LED6停止流水,同时继电器松开,蜂鸣器将发出“嘀”的警报声,记录时间停止递减,洗车中断。当车回来时,可恢复中断,继续洗车;若车未回来,可按S4恢复初始状态。 3)在洗车过程中,按S4键可以强制结束洗车,此时数码管显示 ,同时LED3~LED6停止流水,并全部点亮,继电
机电一体化试卷及答案
1、机电一体化系统中的计算机接口电路通常使用光电耦合器,光电耦合器的作用有哪些 1. (1)能保护系统元件不受高共模电压的损害,防止高压对低压信号系统的损坏。 (2)泄漏电流低,对于测量放大器的输入端无须提供偏流返回通路。 (3)共模抑制比高,能对直流和低频信号(电压或电流)进行准确、安全的测量。 2、什么是三相六拍通电方式 2. 如果步进电动机通电循环的各拍中交替出现单、双相通电状态,这种通电方式称为单双相轮流通电方式。如A → AB → B → BC →C → CA →… 3、简述PWM 脉宽调速原理。 3. 在一个周期T 内闭合的时间为τ,则一个外加的固定直流电压U 被按一定的频率开闭的开关S 加到电动机的电枢上,电枢上的电压波形将是一列方波信号,其高度为U 、宽度为τ,如右图所示。电枢两端的平均电压为: U U Udt U T T T d ρτ=== ?01 式中 ρ=τ/T=U d /U ,(0<ρ<1) ρ为导通率(或称占空比) 。 当T 不变时,只要改变导通时间τ,就可以改变电枢两端的平均电压Ud 。当τ从0~T 改变时,Ud 由零连续增大到U 。 5.传感器是一种以一定的精确度把被测量转换为与之有确定对应关系的,便于应用的某种物理量 的测量装置。敏感元件、转换元件、基本电路。 2、滚珠丝杠副的轴向间隙对系统有何影响如何处理 答。如果滚珠螺旋副中有轴向间隙或在载荷作用下滚珠与滚道接触处有弹性变形,则当螺杆反向转动时,将产生空回误差。为了消除空回误差,在螺杆上装配两个螺母1和2,调整两个螺母的轴向位置,使两个螺母中的滚珠在承受载荷之前就以一定的压力分别压向螺杆螺纹滚道相反的侧面,使其产生一定的变形,从而消除了轴向间隙,也提高了轴向刚度。常用的调整预紧方法有下列三种。垫片调隙式 螺纹调隙式 齿差调隙式 答。1机电一体化--从系统的观点出发,将机械技术 、微电子技术、信息技术、控制技术等在系统工程基础上有机地加以综合,以实现整个系统最佳化的一门新科学技术。 2、柔性制造系统:柔性制造系统(Flexible Manufacturing System )是由两台或两台以上加工 中心或数控机床组成,并在加工自动化的基础上实现物料流和信息流的自动化 5、感应同步器: 感应同步器是一种应用电磁感应原理制造的高精度检测元件,有直线和圆盘式两种,分别用作检测直线位移和转角。 2、伺服电动机是一种能够跟踪输入的指令信号进行动作,从而获得精确的位置、速度及动 力输出电动机 1.试分析图示传动系统中,齿轮减速器的传动误差对工作台输出精度的影响 解答:
机电一体化技术—考试题库及答案
------单选 滚珠丝杠螺母副结构类型有外循环插管式和_________等类型. 收藏 A. 内循环反向器式 B. 外循环反向器式 C. 内、外双循环 D. 内循环插管式 回答错误!正确答案: B PWM指的是________. 收藏 A. 计算机集成系统 B. 可编程控制器 C. 机器人 D. 脉宽调制 回答错误!正确答案: D 检测环节能够对输出进行测量,并转换成比较环节所需要的量纲,一般包括传感器和_______. 收藏 A. 转换电路 B. 调制电路 C. 控制电路 D. 逆变电路 回答错误!正确答案: A 下列关于机电一体化的说法中正确的是________. 收藏 A. 机电一体化设计主要是指产品的设计,不需要系统论方面的知识 B. 机电一体化技术是由传统机械技术及电子技术两方面技术构成 C. 机电一体化是指机电一体化技术,而不包含机电一体化产品 D. 机电一体化技术是以机械为主体 回答错误!正确答案: D 伺服控制系统一般包括控制器、被控对象、执行环节、比较环节和_________等个五部分.
收藏 A. 换向结构 B. 检测环节 C. 存储电路 D. 转换电路 回答错误!正确答案: B 电压跟随器的输出电压________输入电压. 收藏 A. 大于等于 B. 大于 C. 小于 D. 等于 回答错误!正确答案: D 滚珠丝杠螺母副结构类型有两类:外循环插管式和________. 收藏 A. 内循环反向 B. 内循环插管式 C. 外循环反向器式 D. 内、外双循环 回答错误!正确答案: A 受控变量是机械运动的一种反馈控制系统称________. 收藏 A. 伺服系统 B. 工业机器人 C. 顺序控制系统 D. 数控机床 回答错误!正确答案: A 下列关于机电一体化系统的伺服系统稳定性说法中错误的是________. 收藏 A.
机电一体化系统设计试题及答案
一、名词解释(每小题2分,共10分) 1、测量 2、灵敏度 3、压电效应 4、动态误差 5、传感器 二、填空题(每小题2分,共20分) 1、滚珠丝杆中滚珠的循环方式: _内旋换与外循环 2、机电一体化系统,设计指标与评价标准应包括___ _______, __________, __________ , __________。 3、顺序控制系统就是按照预先规定的次序完成一系列操作的系统, 顺序控制器通常用________。 4、某光栅的条纹密度就是50条/mm,光栅条纹间的夹角θ=0、001孤度, 则莫尔条纹的宽度就是_______________________。 5、连续路径控制类中为了控制工具沿任意直线或曲线运动,必须同时控制 每一个轴的______________________,使它们同步协调到达目标点。 6、某4极交流感应电机,电源频率为50Hz,转速为1470r/min,则转差率为_____________。 7、齿轮传动的总等效惯量与传动级数__________________________________________。 8、累计式定时器工作时有_____________________________________________________。 9、复合控制器必定具有__________________________________。 10、钻孔、点焊通常选用_______________________________________类型。 三、选择题(每小题2分,共10分) 1、一般说来,如果增大幅值穿越频率ωc的数值,则动态性能指标中的调整时间ts ( ) A、产大 B、减小 C、不变 D、不定 2、加速度传感器的基本力学模型就是( ) A、阻尼—质量系统 B、弹簧—质量系统 C、弹簧—阻尼系统 D、弹簧系统 3、齿轮传动的总等效惯量与传动级数( ) A、有关 B、无关 C、在一定级数内有关 D、在一定级数内无关 4、顺序控制系统就是按照预先规定的次序完成一系列操作的系统,顺序控制器通常用( ) A、单片机 B、2051 C、PLC D、DSP 5、伺服控制系统一般包括控制器、被控对象、执行环节、比较环节与检测环节等个五部分。 A 换向结构 B 转换电路 C 存储电路D检测环节 四、判断题(每小题2分,共10分) 1、伺服控制系统的比较环节就是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号。( ) 2、电气式执行元件能将电能转化成机械力,并用机械力驱动执行机构运动。如交流电机、直流电机、力矩电机、步进电 机等。( ) 3、对直流伺服电动机来说,其机械特性越硬越好。( ) 4、步进电机的步距角决定了系统的最小位移,步距角越小,位移的控制精度越低。( ) 5、伺服电机的驱动电路就就是将控制信号转换为功率信号,为电机提供电能的控制装置,也称其为变流器,它包括电压、 电流、频率、波形与相数的变换。( ) 五、问答题(每小题10分,共30分) 1、步进电动机常用的驱动电路有哪几种类型? 2、什么就是步进电机的使用特性? 3、机电一体化系统设计指标大体上应包括哪些方面? 一、名词解释(每小题2分,共10分) 1、就是人们借助于专门的设备,通过一定的方法对被测对象收集信息,取得数据概念的过程。 2、指在稳态下,输出的变化量ΔY与输入的变化量ΔX的比值。即为传感器灵敏度。 S=dy/dx=ΔY/ΔX 3、某些电介质,当沿着一定的方向对它施加力而使它产生变形时,内部就会产生极化现象,同时在它的两个表面上将产生 符号相反的电荷。当外力去掉后,它又重新恢复到不带电的状态,这种现象被称为压电效应。 4、动态误差在被测量随时间变化过程中进行测量时所产生的附加误差称为动态误差。
中职英语技能大赛模拟题
“2012年全国职业院校技能大赛”中职组 职业英语技能赛项样题及说明 (一)比赛目的 以赛促学,以赛促教是本次大赛的目标。大赛致力于为全国中职学生及英语教师创建一个交流学习、拓展视野、展示才华的平台,推动中职英语教学模式和人才培养方式的转变,展现中职学校英语教学改革成果,着力于中职学生沟通能力、信息处理能力、创新能力、思辨能力的综合培养,服务于中职英语教学改革的发展需求。 (二)比赛构成 比赛共由四个环节构成:在线测评、情境交流、职场应用和职业风采。 2
“ 附录一 职业英语技能大赛测评 本次考试包括听力和阅读两部分,共25道题目。请在30分钟之内完成。 听力测试现在开始。请注意:听力部分结束后,你将无法返回修改。 Part I Listening听力(20%) Section1 In this section,you will hear five short sentences and questions.There are three pictures marked A,B,and C for each question.Choose the picture that best matches the question.Each sentence and question will be read twice.You will have10seconds for each question.(图片判断。在本节中,你将听到5个句子和相应的问题,每道题配有A、B、C三幅图片,请选择与题目内容相符合的一幅图片。每道题读两遍。每题你将有10秒钟的作答时间。) 1.what’s the matter with the woman? () A. B. C. 3
机电一体化系统设计试题_1答案
习题一答案 1-1、什么是机电一体化? 机电一体化技术综合应用了机械技术、微电子技术、信息处理技术、自动控制技术、检测技术、电力电子技术、接口技术及系统总体技术等群体技术,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。 1-2、什么是机电一体化的变参数设计? 在设计方案和结构原理不变的情况下,仅改变部分结构尺寸和性能参数,使之适用范围发生变化的设计方式。例如,同一种产品不同规格型号的相同设计。 1-3、机电一体化技术与传统机电技术的区别。 传统机电技术的操作控制主要以电磁学原理的各种电器来实现,如继电器、接触器等,在设计中不考虑或很少考虑彼此间的内在联系。机械本体和电气驱动界限分明,整个装置是刚性的,不涉及软件和计算机控制。机电一体化技术以计算机为控制中心,在设计过程中强调机械部件和电器部件间的相互作用和影响,整个装置在计算机控制下具有一定的智能性。 1-4、试分析机电一体化技术的组成及相关关系。 机电一体化系统是多学科技术的综合应用,是技术密集型的系统工程。其技术组成包括:机械技术、检测技术、伺服传动技术、计算机与信息处理技术、自动控制技术和系统总体技术等。现代的机电一体化产品甚至还包含了光、声、化学、生物等技术等应用。 1-5、一个典型的机电一体化系统,应包含哪些几个基本要素? 机电一体化系统,应包含以下几个基本要素:机械本体、动力与驱动部分、执行机构、传感测试部分、控制及信息处理部分。我们将这些部分归纳为:结构组成要素、动力组成要素、运动组成要素、感知组成要素、智能组成要素;这些组成要素内部及其之间,形成通过接口耦合来实现运动传递、信息控制、能量转换等有机融合的一个完整系统。 1-6、试简述机电一体化系统的设计方法。 机电一体化系统的设计过程中,一直要坚持贯彻机电一体化技术的系统思维方法,要从系统整体的角度出发分析研究各个组成要素间的有机联系,从而确定系统各环节的设计方法,并用自动控制理论的相关手段,进行系统的静态特性和动态特性分析,实现机电一体化系统的优化设计。1-7、机电一体化系统(产品)开发的类型。
机电一体化复习题(附答案)
机电一体化复习题(附答案)
机电一体化复习题 一、名词解释 1机电一体化 2伺服控制 3闭环控制系统 4逆变器 5 SPWM 6单片机 7 I/O接口 8 I/O通道 9 串行通信 10直接存储器存取(DMA) 二、判断题: 1 在计算机接口技术中I/O通道就是I/O接口。 (×) 2 滚珠丝杆不能自锁。(√) 3 无论采用何种控制方案,系统的控制精度总是高于检测装置的精度。(×) 4 异步通信是以字符为传输信息单位。(√) 5 同步通信常用于并行通信。(×) 6 无条件I/O方式常用于中断控制中。(×)7从影响螺旋传动的因素看,判断下述观点的正确或错误 (1)影响传动精度的主要是螺距误差、中径误差、牙型半角误差(√) (2)螺杆轴向窜动误差是影响传动精度的因素(√)
(3)螺杆轴线方向与移动件的运动方向不平行而形成的误差是影响传动精度的因素(√)(4)温度误差是影响传动精度的因素(√) 三、单项选择题 1. 步进电动机,又称电脉冲马达,是通过( B )决定转角位移的一种伺服电动机。 A 脉冲的宽度 B 脉冲的数量 C 脉冲的相位 D 脉冲的占空比 2. 对于交流感应电动机,其转差率s的范围为(B)。 A.1 机电一体化系统设计试题 课程代码:02245 一、单项选择题(本大题共14小题,每小题1分,共14分)在每小题列出的四个选项中只有一个选项是符合题目要求的,请将正确选项前的字母填在题后的括号内。 1.受控变量是机械运动的一种反馈控制系统称( ) A.顺序控制系统 B.伺服系统 C.数控机床 D.工业机器人 2.齿轮传动的总等效惯量随传动级数( ) A.增加而减小 B.增加而增加 C.减小而减小 D.变化而不变 3.滚珠丝杠螺母副结构类型有两类:外循环插管式和( ) A.内循环插管式 B.外循环反向器式 C.内、外双循环 D.内循环反向器式 4.某光栅的条纹密度是100条/mm,光栅条纹间的夹角θ=0.001孤度,则莫尔条纹的宽度是( ) A.100mm B.20mm C.10mm D.0.1mm 5.直流测速发电机输出的是与转速( ) A.成正比的交流电压 B.成反比的交流电压 C.成正比的直流电压 D.成反比的直流电压 6.电压跟随器的输出电压( )输入电压。 A.大于 B.大于等于 C.等于 D.小于 7.某4极交流感应电动机,电源频率为50Hz,当转差率为0.02时,其转速为( ) A.1450[r/min] B.1470[r/min] C.735[r/min] D.2940[r/min] 8.右图称( ) A.直流伺服电动机调节特性 B.直流伺服电动机机械特性 C.直流伺服电动机动态特性 D.直流伺服电动机调速特性 9.计算步进电动机转速的公式为( ) A. B.T sm cos C. D. 180°- 10.一般说来,如果增大幅值穿越频率ωc的数值,则动态性能指标中的调整 时间t s( ) A.增大 B.减小 C.不变 D.不定 11.已知f(t)=a+bt,则它的拉氏变换式为( ) A.+b B. C. D. 12.连续路径控制类中为了控制工具沿任意直线或曲线运动,必须同时控制每一个轴的( )使得它们同步协调到达目标点。 A.位置和加速度 B.速度和加速度 C.位置和速度 D.位置和方向 13.图示利用继电器触点实现的逻辑函数为( ) A.(A+)2(+B) B.A2+2B C.(A+B)2(+) D.A2B+2 14.累计式定时器工作时有( ) A.1个条件 B.2个条件 C.3个条件 D.4个条件 二、名词解释题(本大题共5小题,每小题2分,共10分) 目录 机电一体化复习题 (2) 机电一体化复习题参考答案 (6) 机电一体化技术试题 (11) 答案及评分标准 (14) 机电一体化复习题 (18) 一、名词解释 (18) 二、填空题 (19) 三、简答题 (20) 四、选择题。(无答案) (23) 五、应用题 (24) 《机电一体化技术》试卷(一) (27) 《机电一体化技术》试卷(一)答案 (29) 《机电一体化技术》试卷(二) (31) 《机电一体化技术》试卷(二) 答案 (34) 《机电一体化技术》试卷(三) (37) 《机电一体化技术》试卷(三)答案 (39) 《机电一体化技术》试卷(四) (42) 《机电一体化技术》试卷(四) 答案 (44) 《机电一体化技术》试卷(五) (47) 《机电一体化技术》试卷(五) 答案 (48) 机电一体化系统设计试题 (52) 一、填空题(每空1分,共20分) (53) 二、简答题(每题5分,共30分) (53) 三、计算题(共20分)(将本题答案写在答题纸上) (53) 四、综合分析题(共30分) (54) 机电一体化系统设计试题答案 (54) 一、填空题(每空1分,共20分) (54) 二、简答(每题5分,共30分) (55) 三、计算题(共20分) (55) 四、综合分析题(30分) (55) 机电一体化复习题 一、名词解释 1机电一体化 2伺服控制 3闭环控制系统 4逆变器 5 SPWM 6单片机 7 I/O接口 8 I/O通道 9 串行通信 10直接存储器存取(DMA) 二、判断题: 1 在计算机接口技术中I/O通道就是I/O接口。(3) 2 滚珠丝杆不能自锁。(√) 3 无论采用何种控制方案,系统的控制精度总是高于检测装置的精度。(3) 4 异步通信是以字符为传输信息单位。(√) 5 同步通信常用于并行通信。(3) 6 无条件I/O方式常用于中断控制中。(3) 7从影响螺旋传动的因素看,判断下述观点的正确或错误 (1)影响传动精度的主要是螺距误差、中径误差、牙型半角误差(√) (2)螺杆轴向窜动误差是影响传动精度的因素(√) (3)螺杆轴线方向与移动件的运动方向不平行而形成的误差是影响传动精度的因素(√) (4)温度误差是影响传动精度的因素(√) 三、单项选择题 1. 步进电动机,又称电脉冲马达,是通过( B )决定转角位移的一种伺服电动机。 A 脉冲的宽度 B 脉冲的数量 C 脉冲的相位 D 脉冲的占空比 2. 对于交流感应电动机,其转差率s的范围为(B)。 A.1 1.什么是“机电一体化”?以打夯机为例,内含机械与电器,问这是不是机电 一体化产品? 答:机电一体化又称机械电子工程,是机械工程与自动化的一种,英语称为Mechatronics,它是由英文机械学Mechanics的前半部分与电子学Electronics 的后半部分组合而成。 打夯机不属于机电一体化产品。因为打夯机只是普通的机械加电器,它属于硬连接或者称为机械连接只能应用在就地或者小范围场合使用,不能满足大面积和远程控制。而机电一体化就不一样了,它不光有硬连接、机械连接还有软连接。机电一体化属于同时运用机械、电子、仪表、计算机和自动控制等多种技术为一体的一种复合技术。它不光可以就地操作,小范围应用,还可以大面积使用操作,远程监测、控制。 2.机电一体化的技术构成是什么? 答:机械技术、微电子技术、信息技术 3.产品实现机电一体化后,可以取得那些成效? 答:产品实现机电一体化后可以取得的成效:产品性能提高、功能增强、结构简化、可靠性提高、节约能源、改善操作、提高灵活性等。 4.数字量传感具有哪三种类型?他们有什么区别? 数字传感器按结构可分成三种类型: 1.直接式数字量传感器——其分辨率决定于数字量传感器的位数。 被测物理量→数字编码器→信息提取装置→数字量输出 2.周期计数式数字传感器 它的结构示意图如下图1所示。此种结构的位移分辨率对低精度的周期计数式数字传感器而言,仅由周期信号发生器的性质决定。例如,光栅当长1mm有100条刻线时,其分辨率即为0.01mm;对高精度的周期计数式数字传感器而言,还要考虑到电子细分数。如在100倍电子细分数下,此光栅的分辨率就是0.1μm。此种结构属于增量式结构,结构的特点(位移方向的要求)决定它不但备有辨向电路,而且周期计数器还具有可逆性质。 图1 周期计数式数字量传感器的结构方框图 3.频率式数字传感器 其结构示意图如下图2所示。按振荡器的形式,可将此种数字传感器分成带有晶体谐振器的和不带晶体谐振器的两种。前者,按被测量的作甩点,又分作用在石 宜宾职业技术学院 《典型机电一体化控制系统分析与设计》 试题库 课程代码:1311303S 课程性质:专业必修课 适用专业:机电一体化技术 学分:4 负责人:温洪昌 参与人:杨阳熊平 二0一五年三月 典型机电一体化控制系统分析与设计知识点 课程试题库规划(B类) 专业:机电一体化课程:典型机电一体化控制系统分析与设计负责人:温洪昌课程类别:B类 主要知识点1:一个机电一体化系统组成结构划分(103) 一、选择题 1、一个典型的机电一体化系统,应包含以下几个基本要素:()。 A 机械本体 B 动力与驱动部分 C 执行机构 D. 控制及信息处理部分 【代码】10341018 【答案】A、B、C、D 2、机电一体化系统(产品)开发的类型()。 A 开发性设计 B 适应性设计 C 变参数设计 D 其它 【代码】10331028 【答案】A、B、C 3、机电一体化系统(产品)设计方案的常用方法()。 A 取代法 B 整体设计法 C组合法 D其它 【代码】10331038 【答案】A、B、C 4、机电一体化的高性能化一般包含()。 A高速化 B高精度 C高效率 D高可靠性。 【代码】10341048 【答案】A、B、C、D 5、抑制干扰的措施很多,主要包括()。 A屏蔽 B隔离 C滤波 D接地和软件处理等方法【代码】10341058 【答案】A、B、C、D 6、柔性制造系统的英文缩写是()。 A FMS B CIMS C CAPP D MEMS 【代码】10311068 【答案】A 7、微电子机械系统的英文缩写是()。 A FMS B CIMS C CAPP D MEMS 【代码】10311078 I. Listening Comprehension and typing (英文听打) Directions:In the following practice, you will hear a short dialogue. Please type the correct information on the answer sheet according to the5 questions given bellow: Zhang Hui去失物招领处寻找手机事宜,请听录音(附音频文件),根据录音内容填写下面的相关信息: Items Information II. Reading Comprehension (阅读理解) Directions: in the following practice,you are going to read 5 passages. After reading a passage, you will find questions or unfinished statements. For each question or statement, you are required to make the correct choice among A,B,C and D Passage 1 What makes money valuable? Why is a piece of paper marked $ 10 worth more than one marked $1? You could say there is no reason. It’s true that a special kind of paper is used to make dollar bills, and they are pretty, but that’s not what makes them valuable. The real reason money is valuable is that everyone believes it is. Ancient economies had no paper money or coins. Some used barter---- trading one thing for another. Others used all kinds of objects as money. Any object would do, as long as there was not an unlimited amount of it. Animals or metals were popular, and so were manufactured products like jewelry or weapons. Wealth in ancient Greece was measured in tools or cattle. This kind of money had two purposes. First, it was useful in itself. Tools and cattle can be used for farming. And second, it was a way to symbolize and measure value. A house, for example, would be valued at a certain number of tools or cattle. This greatly simplified trade. Other societies used money that was totally symbolic. For instance, American Indians used wampum, which is made from seashells. And until recently on the pacific island of Yap, people use large stone discs as money. In most places these types of money died out because more practical forms of money were invented. People started using precious metals, such as gold and silver, that were easier to carry around than tools or stones. And in the eighteenth century, paper money was introduced. At first people were suspicious of new currency, but they came to accept it because the government or bank issuing it would exchange an equal amount of gold for the paper. A $ 10 bill really was worth $ 10 for gold. But now, people are used to the idea that the government doesn’t have to back its money w ith gold. Everyone believes that a $ 10 bill is 一、名词解释 1、机电一体化:机电一体化技术综合应用了机械技术、微电子技术、信息处理技术、自动控制技术、检测技术、电力电子技术、接口技术及系统总体技术等群体技术,实现多种技术功能复合的最佳功能价值的系统工程技术。 2、柔性制造系统:柔性制造系统(Flexible Manufacturing System)是由两台或两台以上加工中心或数控机床组成,并在加工自动化的基础上实现物料流和信息流的自动化。 3、传感器:传感器适机电一体化系统中不可缺少的组成部分,能把各种不同的非电量转换成电量,对系统运行中所需的自身和外界环境参数及状态进行检测,将其变成系统可识别的电信号,传递给控制单元。 4、伺服电动机:伺服电动机又称控制电机,其起动停止、转速或转角随输入电压信号的大小及相位的改变而改变。输入的电压信号又称控制信号或控制电压,改变控制信号可以改变电动机的转速及转向,驱动工作机构完成所要求的各种动作。 5、感应同步器:感应同步器是一种应用电磁感应原理制造的高精度检测元件,有直线和圆盘式两种,分别用作检测直线位移和转角。 6、人机接口:人机接口(HMI)是操作者与机电系统(主要是控制微机)之间进行信息交换的接口,主要完成输入和输出两方面的工作。 7、PLC:可编程控制器(Programmable Logical Controller)简称PLC.是一种在继电器控制和计算机控制的基础上开发出来,并逐渐发展成为以微处理器为核心,把自动化技术、计算机技术、通信技术融为一体的新型工业自动控制装置,广泛应用在各种生产机械和生产过程的自动控制中。 8、变频器:变频器是利用电力半导体器件的通断作用将工频电源变换为另一频率的电能控制装置,能实现对交流异步电机的软起动、变频调速、提高运转精度、改变功率因素以及过流/过压/过载保护等功能。 9、通信协议:通信协议是指通信双方就如何交换信息所建立的一些规定和过程,包括逻辑电平的定义、应用何种物理传输介质、数据帧的格式、通信站地址的确定、数据传输方式等。 10、MPS系统:模块化生产加工系统(Modular Production System)简称MPS系统,它是德国FESTO公司结合现代工业的特点研制开发的模拟自动化生产过程,集机械、电子、传感器、气动、通信为一体的高度集成的机电一体化装置。 二、填空题 1、电感式传感器是一种把微小位移变化量转变成电感变化量的位移传感器。 2、光电编码器根据结构可分为增量式和绝对式。 3、热电阻温度传感器的工作原理是基于金属的热电阻效应。 4、热电偶温度传感器的工作原理是基于物体的热电效应。 5、对伺服系统的技术要求是系统精度、稳定性、响应特性、工作频率。 6、液压系统一般包括动力元件、执行元件、控制元件和辅助元件四个部分。 7、典型的气动驱动系统由气源装置、执行元件、控制元件和辅助元件组成。 8、机电控制系统的机械装置主要包括传动机构、导向机构和执行器三个部分。 9、机电一体化的机械系统设计主要包括两个环节:静态设计、动态设计。 10、欠电流继电器利用其常开触点串接在被控线路中起欠流保护。 11、过电流继电器利用其常闭触点串接在被控线路中起过流保护。 12、接口的基本功能主要有数据格式转换、放大、通信联络。 13、伺服系统的基本组成包括控制器、执行环节、检测装置、比较环节。 14、工作接地分为一点接地、多点接地。 15、机电一体化产品按用途可以划分为办公机电一体化产品、产业机电一体化产品和民机电一体化系统设计试题及答案
机电一体化试题及答案汇总
机电一体化期末考试试题及答案
机电一体化题库1(1)解析
中职技能大赛英语通用职业能力试题
机电一体化复习题(含答案)