系统辨识内容与要求
系统辨识实验内容与要求
实验题目:三温区空间晶体生长炉温度系统建模
实验对象:三温区空间晶体生长炉
单晶体是现代电子设备制造技术的一个必不可少的部分,它应用广泛,如二极管、三极管等半导体器件都需要用到单晶体。组分均匀(compositional uniformity)、结晶完整(crystallographic perfection)的高质量晶体材料是保证电子设备性能重要因素。
目前,单晶体制备主要靠晶体生长技术完成。其主要过程是:首先在坩埚等加热器皿中对籽晶进行加热,使其由固相转变为液相或气相,再降低器皿中温度,使液相或气相的籽晶材料冷却结晶,就可得到最终的单晶体。这个过程中,为保证晶体的组分均匀和结晶完整,必须使晶体内部各晶格的受力均匀。因此,为减小重力对晶体生长的影响,研究者提出在空间微重力环境下进行晶体生长的方案。我们研究的空间晶体生长炉就是该方案中的晶体加热设备。
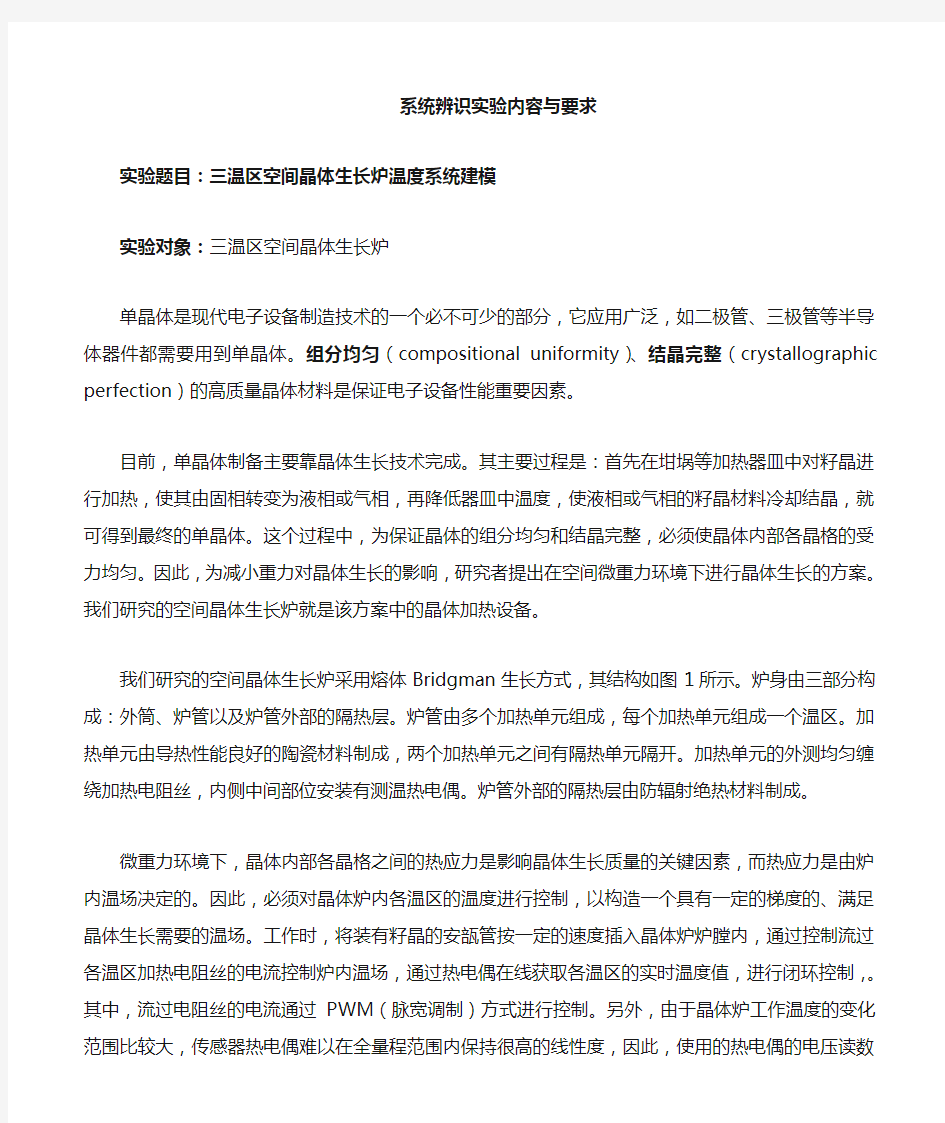
我们研究的空间晶体生长炉采用熔体Bridgman生长方式,其结构如图1所示。炉身由三部分构成:外筒、炉管以及炉管外部的隔热层。炉管由多个加热单元组成,每个加热单元组成一个温区。加热单元由导热性能良好的陶瓷材料制成,两个加热单元之间有隔热单元隔开。加热单元的外测均匀缠绕加热电阻丝,内侧中间部位安装有测温热电偶。炉管外部的隔热层由防辐射绝热材料制成。
微重力环境下,晶体内部各晶格之间的热应力是影响晶体生长质量的关键因素,而热应力是由炉内温场决定的。因此,必须对晶体炉内各温区的温度进行控制,以构造一个具有一定的梯度的、满足晶体生长需要的温场。工作时,将装有籽晶的安瓿管按一定的速度插入晶体炉炉膛内,通过控制流过各温区加热电阻丝的电流控制炉内温场,通过热电偶在线获取各温区的实时温度值,进行闭环控制,。其中,流过电阻丝的电流通过PWM(脉宽调制)方式进行控制。另外,由于晶体炉工作温度的变化范围比较大,传感器热电偶难以在全量程范围内保持很高的线性度,因此,使用的热电偶的电压读数与实际温度值间需要进行查表变换。
本实验内容是运用系统辨识的方法建立晶体炉中某个温区的动力学模型,辨识数据已给出,见SI_Data.xls文件。
热电耦
图1三温区空间晶体生长炉的结构图
实验步骤:
a) 试验设计
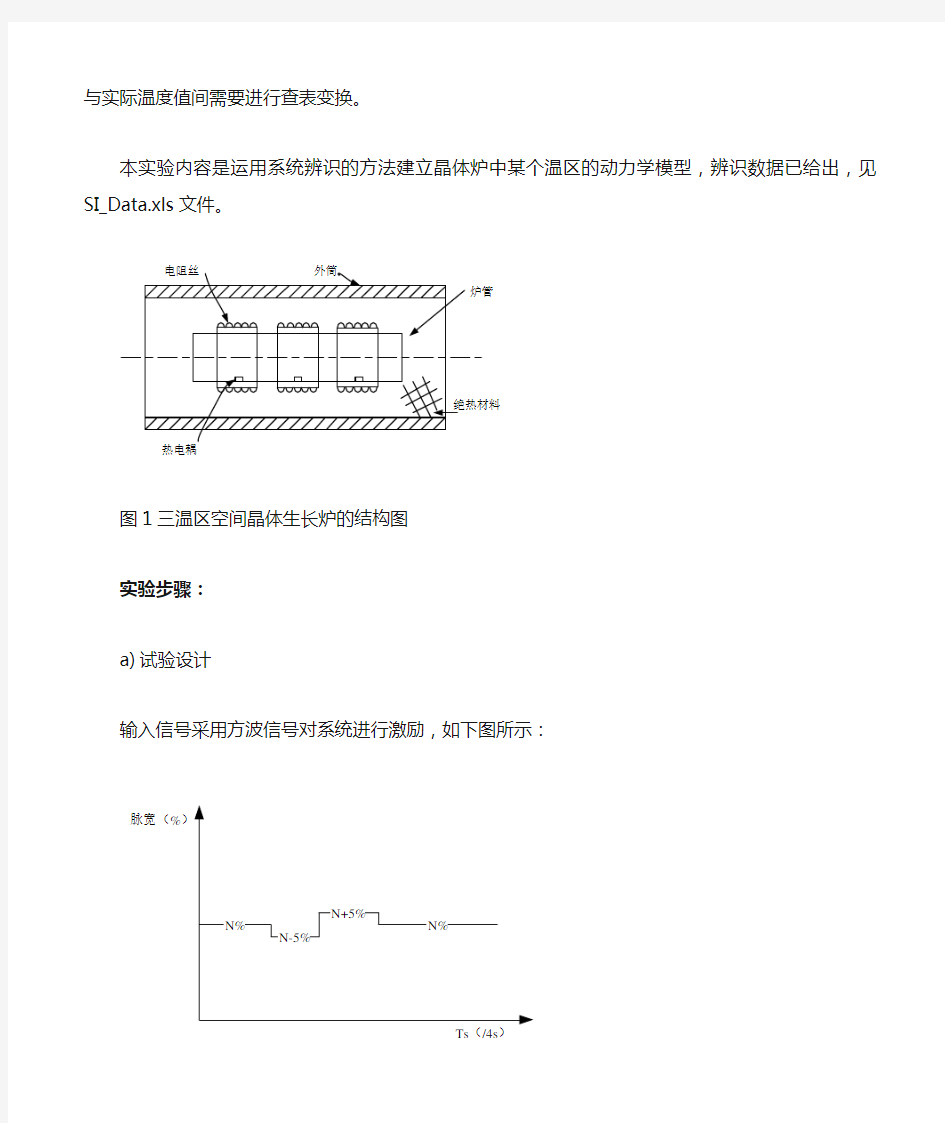
输入信号采用方波信号对系统进行激励,如下图所示:
脉宽(%
首先选择系统的工作点,然后控制系统的输入使系统到达工作点并处于稳态,记录此时的输入脉宽为N%,然后按上图所示的脉宽变化方法来激励系统,每次都要等系统过渡过程结束进入稳态后再改变脉宽。
b) 数据预处理(实测原始数据见文件SI_Data.xls ,第一列为系统的输出值,单位毫伏(MV ),第二
列为系统的输入值,单位百分比(%),采样周期为1秒)
通常,通过辨识实验收集的数据是不能直接用于辨识算法中的,这些数据中可能存在以下几种缺陷:
● 噪声
● 野点
需要进行的数据预处理方法:
● 野点剔除
● 数据归一化
● 低通滤波
c)模型阶次/结构选择:参数模型以及非参数模型,阶次以及纯时延的选择
d)参数估计:最好不要用matlab提供的函数,自己根据教材中相应算法的描述来写辨识代码,但可
以用Matlab提供的函数来粗略估计系统的参数
e)模型校验
在校验过程中,最好使用在模型估计中没有用到的数据序列
实验内容:
要求使用的辨识算法:
●批量最小二乘估计算法
●递推最小二乘估计算法
●渐消记忆递推最小二乘估计算法
●增广最小二乘法
●渐消记忆递推增广最小二乘估计算法
●广义最小二乘法(选做)
●相关辨识法(选做)
报告要求:
1.选择的系统模型类
2.辨识的原理,方法和公式
3.辨识的源程序
4.辨识结果
5.辨识结果和实际系统输出的偏差曲线
6.详细分析和比较所获得的参数辨识结果,说明所用参数辨识方法的优缺点
系统辨识与全参数估计习题
系统辨识与参数估计课程习题 一、 选择题:答案唯一,在( )填入正确答案的编号。 1. 对于批量最小二乘格式L L L E Y +θΦ=,其最小二乘无偏估计的必要条件是( )。 A. 输入序列}{k u 为“持续激励”信号 B. L E 与T L L T L ΦΦΦ-1)(正交 C. L E 为非白噪声向量 D. 0}{=L E E 2. 对象模型为T k k k y e ?θ=+时,采用递推最小二乘估计后的残差序列的计算式为 ( )。 A. 1?T k k k k y ε?θ-=- B. 1?T k k k k y ε?θ-=- C. ?T k k k k y ε?θ=- D. 11?T k k k k y ε?θ--=- 3. 在上题的条件下,递推最小二乘算法中的增益矩阵k K 可以写成( )。 A. 11k k P ?-- B. 1k k P ?- C. 1k k P ?- D. k k P ? 4. 可以同时得到对象参数和干扰噪声模型参数的估计算法是( )。 A. 辅助变量法 B. 广义最小二乘法 C. 最小二乘限定记忆法 D. 相关最小二乘两步法 5. 增广最小二乘估计的关键是( )。 A. 将控制项增广进k ?中,并用残差项取代进行估计 B. 将输出项增广进k ?中,并用残差项取代进行估计 C. 将噪声项增广进k ?中,并用残差项取代进行估计 D. 将噪声项增广进k ?中,并用输出项取代进行估计 答案:1. B 2. C 3. D 4. B 5. C ■ 二、 判断题:以○表示正确或×表示错误。
1.估计残差平方和最小是确定辨识过程对象结构的唯一标准。( ) 2.最小二乘估计的批量算法和递推算法在数学上是等价的。( ) 3.广义最小二乘法就是辅助变量法和增广最小二乘法交替试用。( ) 4.在递推最小二乘算法中,若置0>==T k P P P ,则该算法也能克服“数据饱和” 现象,进而可适用于时变系统。( ) 5.用神经网络对SISO 非线性系统辨识,采用的是输入层和输出层均为一个神经元的三层前馈神经元网络结构。( ) 答案: 1. × 2. ○ 3. × 4. ○ 5. × ■ 三、 设y 和n 21x ,x ,x 之间满足关系)x a x a x a (ex p y n n 2211+++= ,试图利用y 和 n 21x ,x ,x 的观测值来估计参数n 21a ,a ,a ,请将该模型化成最小二乘格式。 答案:θ?T n n 2211x a x a x a ln(y)z =+++== 其中,[][]n 21T n 21T x ,,x ,x a ,,a ,a ==?θ ■ 四、 对于多输入单输出(MISO )系统可由下面的模型描述 k k k e u z B y z A +=---111)()( 其中,k u 为系统的m ×1维输入向量;k y 为系统的标量输出;k e 为标量i.i.d 随机噪 声;1 -z 为延迟算子,即11--=k k y y z ;)(1-z A 为标量参数多项式,)(1-z B 为1×m 的 参数多项式向量: a a n n z a z a z A ---+++= .1)(111 b b n n z B z B B z B ---+++= .)(1101 请写出:最小二乘递推算法公式和计算步骤或流程。 答案: 根据题意,可写出最小二乘格式为: k T k k e y +=θ? 其中, []T n k T k T k n k k k T k b a u u u y y y 12121,,;,,----------= ? 1201,,,;,,,a b T n n a a a B B B θ??=?? 因此,采用批量最小二乘法估计时,设采集数据时刻为k=1,2,…,L ,则有批量最小二乘格式为:
系统辨识之经典辨识法
系统辨识作业一 学院信息科学与工程学院专业控制科学与工程 班级控制二班 姓名 学号
2018 年 11 月 系统辨识 所谓辨识就是通过测取研究对象在认为输入作用的输出响应,或正常运行时 的输入输出数据记录,加以必要的数据处理和数学计算,估计出对象的数学模型。 辨识的内容主要包括四个方面: ①实验设计; ②模型结构辨识; ③模型参数辨识; ④模型检验。 辨识的一般步骤:根据辨识目的,利用先验知识,初步确定模型结构;采集 数据;然后进行模型参数和结构辨识;最终验证获得的最终模型。 根据辨识方法所涉及的模型形式来说,辨识方法可以分为两类:一类是非参 数模型辨识方法,另一类是参数模型辨识方法。 其中,非参数模型辨识方法又称为经典的辨识方法,它主要获得的是模型是 非参数模型。在假定过程是线性的前提下,不必事先确定模型的具体结构,广泛 适用于一些复杂的过程。经典辨识方法有很多,其中包括阶跃响应法、脉冲响应法、相关分析法和普分析法等等,本次实验所采用的辨识方法为阶跃响应法和脉 冲响应法。 1.阶跃响应法 阶跃响应法是一种常用非参数模型辨识方法。常用的方法有近似法、半对数法、切线法、两点法和面积法等。本次作业采用面积法求传递函数。 1.1面积法 ① 当系统的传递函数无零点时,即系统传递函数如下: G(S) = + ?11?1+?+ 1+1 (1-1) 系统的传递函数与微分方程存在着一一对应的关系,因此,可以通过求取 微分方程的系数来辨识系统的传递函数。在求得系统的放大倍数K后,要得到无 因次阶跃响应y(t)(设τ=0),其中y(t)用下式描述: () ?1 () (1-2) 面积法原则上可以求出n为任意阶的个系数。以n为3为例。有: 3() 2() () {| →∞ =| →∞ =| →∞ = 0 (1-3) ()| →∞ = 1
系统辨识复习资料
1请叙述系统辨识的基本原理(方框图),步骤以及基本方法 定义:系统辨识就是从对系统进行观察和测量所获得的信息重提取系统数学模型的一种理论和方法。 辨识定义:辨识有三个要素——数据、模型类和准则。辨识就是按照一个准则在一组模型类中选择一个与数据拟合得最好的模型 辨识的三大要素:输入输出数据、模型类、等价准则 基本原理: 步骤:对一种给定的辨识方法,从实验设计到获得最终模型,一般要经历如下一些步骤:根据辨识的目的,利用先验知识,初步确定模型结构;采集数据;然后进行模型参数和结构辨识;最后经过验证获得最终模型。 基本方法:根据数学模型的形式:非参数辨识——经典辨识,脉冲响应、阶跃响应、频率响应、相关分析、谱分析法。参数辨识——现代辨识方法(最小二乘法等) 2随机语言的描述 白噪声是最简单的随机过程,均值为零,谱密度为非零常数的平稳随机过程。 白噪声过程(一系列不相关的随机变量组成的理想化随机过程) 相关函数: 谱密度: 白噪声序列,白噪声序列是白噪声过程的离散形式。如果序列 满足: 相关函数: 则称为白噪声序列。 谱密度: M 序列是最长线性移位寄存器序列,是伪随机二位式序列的一种形式。 M 序列的循环周期 M 序列的可加性:所有M 序列都具有移位可加性 辨识输入信号要求具有白噪声的统计特性 M 序列具有近似的白噪声性质,即 M 序列“净扰动”小,幅度、周期、易控制,实现简单。 3两种噪声模型的形式是什么 第一种含噪声的被辨识系统数学模型0011()()()()n n i i i i y k a y k i b u k i v k ===-+-+∑∑,式中,噪声序列v(k)通常假定为均值为零独立同分布的平稳随机序列,且与输入的序列u(k)彼此统计独立. 上式写成:0 ()()()T y k k v k ψθ=+。其中,()()()()()()()=1212T k y k y k y k n u k u k u k n ψ------????L L ,,,,,,, ) ()(2τδστ=W R +∞ <<∞-=ωσω2)(W S )}({k W Λ,2,1,0,)(2±±==l l R l W δσ2)()(σωω== ∑ ∞-∞=-l l j W W e l R S ???≠=≈+=?0 , 00,Const )()(1)(0ττττT M dt t M t M T R bit )12(-=P P N
系统辨识最小二乘参数估计matlab
最小二乘参数估计 摘要: 最小二乘的一次性完成辨识算法(也称批处理算法),他的特点是直接利用已经获得的所有(一批)观测数据进行运算处理。这种算法在使用时,占用内存大,离线辨识,观测被辨识对象获得的新数据往往是逐次补充到观测数据集合中去的。在应用一次完成算法时,如果要求在每次新增观测数据后,接着就估计出系统模型的参数,则需要每次新增数据后要重新求解矩阵方程()Z l T l l T l ΦΦΦ-∧=1θ。 最小二乘辩识方法在系统辩识领域中先应用上已相当普及,方法上相当完善,可以有效的用于系统的状态估计,参数估计以及自适应控制及其他方面。 关键词: 最小二乘(Least-squares ),系统辨识(System Identification ) 目录: 1.目的 (1) 2.设备 (1) 3引言 (1) 3.1 课题背景 (1) 4数学模型的结构辨识 (2) 5 程序 (3) 5.1 M 序列子函数 ................................................................................. 错误!未定义书签。 5.2主程序............................................................................................... 错误!未定义书签。 6实验结果: ................................................................................................................................... 3 7参考文献: ................................................................................................. 错误!未定义书签。 1.目的 1.1掌握系统辨识的理论、方法及应用 1.2熟练Matlab 下最小二乘法编程 1.3掌握M 序列产生方法 2.设备 PC 机1台(含Matlab 软件) 3引言 3.1 课题背景 最小二乘理论是有高斯(K.F.Gauss )在1795年提出:“未知量的最大可能值是这样一个数值,它使各次实际观测值和计算值之间的差值的平方乘以度量其精度的数值以后的和最小。”这就是最小二乘法的最早思想。 最小二乘辨识方法提供一个估算方法,使之能得到一个在最小方差意义上与实验数据最
系统辨识
系统辨识理论综述 郭金虎 【摘要】全面论述了系统辨识理论的提出背景以及理论成果,总结了系统辨识理论的基本原理、基本方法以及基本内容,并对其应用及发展做了全面的讨论。 【关键词】系统辨识;准则函数 1概述 系统辨识问题的提出是由于随着科学技术的发展,各门学科的研究方法进一步趋向定量化,人们在生产实践和科学实验中,对所研究的复杂对象通常要求通过观测和计算来定量的判明其内在规律,为此必须建立所研究对象的数学模型,从而进行分析、设计、预测、控制的决策。例如,在化工过程中,要求确定其化学动力学和有关参数,已决定工程的反应速度;在热工过程中,要求确定如热交换器这样的分布参数的系统及动态参数;在生物系统方面,通常希望获得其较精确的数学模型,一般描述在生物群体系统的动态参数;为了控制环境污染,希望得到大气污染扩散模型和水质模型;为进行人口预报,做出相应的决策,要求建立人口增长的动态模型;对产品需求量、新型工业的增长规律这类经济系统,已经建立并继续要求建立其定量的描述模型。其他如结构或机械的振动、地质分析、气象预报等等,都涉及系统辨识和系统参数估计,这类要求正在不断扩大。 2系统辨识的基本原理 2.1系统辨识的定义和基本要素 实验和观测是人类了解客观世界的最根本手段。在科学研究和工程实践中,利用通过实验和观测所得到的信息,或掌握所研究对象的特性,这种方式的含义即为“辨识”。关于系统辨识的定义,1962年,L.A.Zadeh 是这样提出的:“系统辨识就是在输入和输出数据观测的基础上,在指定的一组模型类中,确定一个与所测系统等价的模型”。1978年,L.Ljung 也给出了一个定义:“辨识既是按规定准则在一类模型中选择一个与数据拟合得最好的模型”。可用图2-1来说明辨识建模的思想。 0 G g G 等价准则系统原型 系统模型激励信号y g y e J u 图2-1 系统辨识的原理
基于最小二乘法的系统辨识的设计与开发(整理版)
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 基于最小二乘法的系统辨识的设计与开发(整理版)课程(论文)题目: 基于最小二乘法的系统辨识摘要: 最小二乘法是一种经典的数据处理方法。 最小二乘的一次性完成辨识算法(也称批处理算法),他的特点是直接利用已经获得的所有(一批)观测数据进行运算处理。 在系统辨识领域中, 最小二乘法是一种得到广泛应用的估计方法, 可用于动态系统, 静态系统, 线性系统, 非线性系统。 在随机的环境下,利用最小二乘法时,并不要求观测数据提供其概率统计方面的信息,而其估计结果,却有相当好的统计特性。 关键词: 最小二乘法;系统辨识;参数估计 1 引言最小二乘理论是有高斯( K.F.Gauss)在 1795 年提出: 未知量的最大可能值是这样一个数值,它使各次实际观测值和计算值之间的差值的平方乘以度量其精度的数值以后的和最小。 这就是最小二乘法的最早思想。 最小二乘辨识方法提供一个估算方法,使之能得到一个在最小方差意义上与实验数据最好拟合的数学模型。 递推最小二乘法是在最小二乘法得到的观测数据的基础上,用新引入的数据对上一次估计的结果进行修正递推出下一个参数估计值,直到估计值达到满意的精确度为止。 1 / 10
对工程实践中测得的数据进行理论分析,用恰当的函数去模拟数据原型是一类十分重要的问题,最常用的逼近原则是让实测数据和估计数据之间的距离平方和最小,这即是最小二乘法。 最小二乘法是一种经典的数据处理方法。 在随机的环境下,利用最小二乘法时,并不要求观测数据提供其概率统计方面的信息,而其估计结果,却有相当好的统计特性。 2 最小二乘法的系统辨识设单输入单输出线性定常系统的差分方程为: 1),()()() 1()(01knkubkubnkxakxakxnn ( 1)上式中: )(ku为输入信号;)(kx为理论上的输出值。 )(kx只有通过观测才能得到,在观测过程中往往附加有随机干扰。 )(kx的观测值)(ky可表示为 ( 2)将式( 2)代入式( 1)得 1()()() 1()(101kubkubnkyakyakyn (3) 我们可能不知道)(kn的统计特性,在这种情况下,往往把)(kn看做均值为 0 的白噪声。 设 ( 4)则式( 3)可以写成 (5) 在测量)(ku时也有测量误差,系统内部也可能有噪声,应当
系统辨识理论及应用(课后题答案第三章3.2、3.3)国防工业出版社
1、系统辨识——连续系统传递函数——脉冲传递函数function h=Continuous_system_transferFcn(N,G,dt) % N——系统阶数 % G——采样数据(个数大于等于2N+1) % G为一维行向量 % dt——采样间隔 if nargin<3 errordlg('not enough input varibles','error hint'); else g_NN=zeros(N,N); for i=1:N g_NN(i,:)=G(i+1:i+1+N-1); end g_N=-G(1:N)'; a=inv(g_NN)*g_N; %% x的求解 syms x for i=1:N X(i)=x^i; end f=X*a+1; x=double(solve(f)); %%极点的求解 p=log(x)/dt; c_NN=zeros(N,N); for i=1:N c_NN(i,:)=x.^(i-1); end c_N=G(1:N)'; %%增益求解 k=inv(c_NN)*c_N; p k z=zeros(1,N); p=p'; k=k'; Continuous_TransferFcn=0; for i=1:N Continuous_TransferFcn=Continuous_TransferFcn+zpk(z(i),p(i),k(i)); end Continuous_TransferFcn end end
例题 3.1(P32) >>G=[0 0.1924 0.2122 0.1762]; >> N=2; >> dt=1; >> Continuous_system_transferFcn(N,G,dt) p = -0.4934 -0.7085 k = 1.6280 -1.6280 Continuous_TransferFcn = 0.35024 s --------------------- (s+0.4934) (s+0.7085) Continuous-time zero/pole/gain model. 习题3.2(P34) >> G=[0 0.196 0.443 0.624 0.748 0.831]; >> N=3; >> dt=0.2; >> Continuous_system_transferFcn(N,G,dt) p = -0.0633 -1.7846 -11.1860 k = 1.1249 -1.3399 0.2150 Continuous_TransferFcn = -0.08507 s (s-253.1) ------------------------------- (s+0.06329) (s+1.785) (s+11.19) Continuous-time zero/pole/gain model.
系统辨识复习提纲(答案版)
系统辨识复习提纲 1.什么是系统?什么是系统辨识? 系统泛指由一群有关联的个体组成,根据预先编排好的规则工作,能完成个别元 件不能单独完成的工作的群体。即一群有相互关联的个体组 成的集合称为系统。 系统辩识就是:利用对未知系统的试验数据或在线运行数据(输入/输出数据)以及原理和原则建立系统的(数学)模型的科学。 2.什么是宽平稳随机过程,其遍历定理内容是什么? 答:在数学中,平稳随机过程或者严平稳随机过程,又称狭义平稳过程,是在固定时间和位置的概率分布与所有时间和位置的概率分布相同的随机过程:即随机过程的统计特性不随时间的推移而变化。这样,数学期望和方差这些参数也不随时间和位置变化。 如果平稳随机过程()t x de 各集和平均值等于相对应的时间平均值 x =μx ,()()+t x t x =Rx ()τ,式中x 伪随机过程()t x 的时间平均值; x μ为与以为 概率密度有关的数字特征量集合均值;Rx ()τ为自相关 函数。则称()t x 是各态遍历的平稳随机过程。 3.简述噪声模型及其分类。 P130 噪声模型:) () ()(111 ---=z C z D z H
分类: 1) 自回归模型,简称AR 模型,其模型结构为 )()()(1k v k e z C =- 2) 平均滑动模型,简称MA 模型,其模型结构为)()()(1k v z D k e -= 3)自回归平均滑动模型,简称ARMA 模型,其模型结构为 ))()()()(11k v z D k e z C --= 4.白噪声与有色噪声的区别是什么? 答:辨识所用的数据通常含有噪声。如果这种噪声相关性较弱或者强度很小,则可近似将其视为白噪声。白噪声过程是一种最简单的随机过程。严格地说,它是一种均值为零、谱密度为非零常数的平稳随机过程,或者说它是由一系列不相关的随机变量组成的一种理想化随机过程。白噪声过程没有“记忆性”,也就是说t 时刻的数值与t 时刻以前的过去值无关,也不影响t 时刻以后的将来值。 工程实际中数据所含的噪声往往是有色噪声。所谓有色噪声指的是噪声序列中每一时刻的噪声和另一时刻的噪声是相关的。 5.设一个随机序列)},,2,1(),({L k k z ∈的均值是参数θ 的线性函数 {()}()z k k τθ=E h 其最小二乘估计为:L L L L L z H H H ΛΛθττ1WLS )(? -= 试给出其递推形式的详细推导过程,要求其最终其递推矩阵为保对称的。 P64 在2n 阶“持续激励”输入信号的作用下,加权最小二乘法的解为 L L L L L z H H H ΛΛθττ1WLS )(? -= ?? ??????????=∑∑=-=L i L i i z i i i i i 11 1)()()()()()(h h h ΛΛτ 记k 时刻的参数估计值为
系统辨识
最小二乘法的系统辨识 摘要:在研究一个控制系统过程中,建立系统的模型十分必要。因此,系统辨识在控制系统的研究中起到了至关重要的作用。本文主要介绍了系统辨识的最小二乘方法,最小二乘法的一次完成过程进行了推导,最小二乘法的一次完成的缺陷在于对于有色噪声并没有很好的辨识效果。其中系统辨识在工程中的应用非常广泛,系统辨识的方法有很多种,最小二乘法是一种应用极其广泛的系统辨识方法,阐述了动态系统模型的建立及其最小二乘法在系统辨识中的应用,并通过实例分析最小二乘法应用于直流调速系统的系统辨识。 关键词:系统辨识、最小二乘法 一、系统辨识的定义 系统辨识、状态估计和控制理论是现代控制理论三个相互渗透的环节。1962年,L.A.zadeh给出“辨识”的定义为:系统辨识是在对输入和输出观测的基础上,在指定的一类系统中,确定一个与被识别的系统等价的系统。[1]最先提出了系统辨识的定义。 随着科技的发展,数学建模对科学研究及指导及生产都有非常重要的意义。给一个系统建立数学模型是一个比较复杂的工作,其中关键的一个环节是系统辨识。系统辨识就是研究如何利用系统的输入、输出信号建立系统的数学模型。[7]系统数学模型是系统输入、输出及其相关变量间的数学关系式,它描述系统输入、输出及相关变量之间相互影响、变化的规律性。换句话说,系统辨识就是从系统的运算和实验数据建立系统的模型(模型结构和参数)。系统辨识的三要素:数据、模型类和准则。系统辨识的基本原理:在输入输出的基础上,从一类系统中确定一个与所测系统等价的系统。[2] 二、最小二乘法的引出 最小二乘法是1795年高斯在预测星体运行轨道最先提出的,它奠定了最小二乘估计理论的基础.到了20世纪60年代瑞典学者Austron把这个方法用于动态系统的辨识中,在这种辨识方法中,首先给出模型类型,在该类型下确定系统模型的最优参数。 我们可以将所研究的对象按照对其了解的程度分成白箱、灰箱和黑箱。于其内部结构、机制只了解一部分,对于其内部运行规律并不十分清楚,这样的研究对象通常称之为“灰箱”;如果我们对于研究对象的内部结构、内部机制及运行规律均一无所知的话,则把这样的研究对象称之为“黑箱”。研究灰箱和黑箱时,将研究的对象看作是一个系统,通过建立该系统的模型,对模型参数进行辨识来确定该系统的运行规律。对于动态系统辨识的方法有很多,但其中应用最广泛,辨识效果良好的就是最小二乘辨识方法,研究最小二乘法在系统辨识中的应用具有现实的、广泛的意义。[4]
系统辨识作业及答案
一. 问答题 1. 介绍系统辨识的步骤。 答:(1)先验知识和建模目的的依据;(2)实验设计;(3)结构辨识;(4)参数估计;(5)模型适用性检验。 2. 考虑单输入单输出随机系统,状态空间模型 []) ()(11)()(11)(0201)1(k v k x k y k u k x k x +=??? ???+??????=+ 转换成ARMA 模型。 答:ARMA 模型的特点是u(k)=0, []) ()(11)()(0201)1(k v k x k y k x k x +=?? ? ???=+ 3. 设有一个五级移位寄存器,反馈取自第2级和第3级输出的模2加法和。试说明: (1) 其输出序列是什么? (2) 是否是M 序列? (3) 它与反馈取自第4级与第3级输出模2加法和所得的序列有何不同? (4) 其逆M 序列是什么? 答:(1)设设输入序列1 1 1 1 1 111018110107101006010015100114001113011112111111)()()()()()()()(()()()()()()()01110161110115110101410100)13(010011210011110011110011109()()()()()()()001112401110)23(111012211010211010020010011910011180011117()()()()()()()()10011 3200111310111030001112911010281010027010012610011 25 其输出序列为:1 1 1 1 1 0 0 1 0 1 ⑵不是M 序列 ⑶第4级与第3级模2相加结果
系统辨识—最小二乘法汇总
最小二乘法参数辨识 201403027 摘要:系统辨识在工程中的应用非常广泛,系统辨识的方法有很多种,最小 二乘法是一种应用极其广泛的系统辨识方法.阐述了动态系统模型的建立及其最小二乘法在系统辨识中的应用,并通过实例分析说明了最小二乘法应用于系统辨识中的重要意义. 关键词:最小二乘法;系统辨识;动态系统 Abstract: System identification in engineering is widely used, system identification methods there are many ways, least squares method is a very wide range of application of system identification method and the least squares method elaborated establish a dynamic system models in System Identification applications and examples analyzed by the least squares method is applied to illustrate the importance of system identification. Keywords: Least Squares; system identification; dynamic system
引言 随着科学技术的不断发展,人们认识自然、利用自然的能力越来越强,对于未知对象的探索也越来越深入.我们所研究的对象,可以依据对其了解的程度分为三种类型:白箱、灰箱和黑箱.如果我们对于研究对象的内部结构、内部机制了解很深入的话,这样的研究对象通常称之为“白箱”;而有的研究对象,我们对于其内部结构、机制只了解一部分,对于其内部运行规律并不十分清楚,这样的研究对象通常称之为“灰箱”;如果我们对于研究对象的内部结构、内部机制及运行规律均一无所知的话,则把这样的研究对象称之为“黑箱”.研究灰箱和黑箱时,将研究的对象看作是一个系统,通过建立该系统的模型,对模型参数进行辨识来确定该系统的运行规律.对于动态系统辨识的方法有很多,但其中应用最广泛,辨识 效果良好的就是最小二乘辨识方法,研究最小二乘法在系统辨识中的应用具有现实的、广泛的意义. 1.1 系统辨识简介 系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。现代控制理论中的一个分支。通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。而系统辨识所研究的问题恰好是这些问题的逆问题。通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。系统辨识包括两个方面:结构辨识和参数估计。在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。 1.2系统辨识的目的 在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。通过辨识建立数学模型通常有四个目的。 ①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。 ②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。用于系统分析的仿真模型要求能真实反映系统的特性。用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。 ③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。预测模型辨识的等价准则主要是使预测误差平方和最小。只要预测误差小就是好的预测
系统辨识研究综述
系统辨识研究综述 摘要:本文综述了系统辨识的发展与研究内容,对现有的系统辨识方法进行了介绍并分析其不足,进一步引出了把神经网络、遗传算法、模糊逻辑、小波网络知识应用于系统辨识得到的一些新型辨识方法。并对基于T-S模型的模糊系统辨识进行了介绍。文章最后对系统辨识未来的发展方向进行了介绍 关键词:系统辨识;建模;神经网络;遗传算法;模糊逻辑;小波网络;T-S 模型 1.系统辨识的发展和基本概念 1.1系统辨识发展 现代控制论是控制工程新的理论基础。辨识、状态估计和控制理论是现代控制论三个相互渗透的领域。辨识和状态估计离不开控制理论的支持;控制理论的应用又几乎不能没有辨识和状态估计。 而现代控制论的实际应用不能脱离被控对象的动态特性,且所用的数学模型需要选择一种使用方便的描述形式。但很多情况下建立被控对象的数学模型并非易事,尤其是实际的物理或工程对象,它们的机理复杂且含有各种噪声,使建立数学模型更加困难。系统辨识就是应此需要而形成的一门学科。 系统辨识和系统参数估计是六十年代开始迅速发展起来的。1960年,在莫斯科召开的国际自动控制联合会(IFCA)学术会议上,只有很少几篇文章涉及系统辨识和系统参数估计问题。然而,在此后,人们对这一学科给予了很大的注意,有关系统辨识的理论和应用的讨论日益增多。七十年代以来,随着计算机的开发和普及,系统辨识得到了迅速发展,成为了一门非常活跃的学科。 1.2系统辨识基本概念的概述 系统辨识是建模的一种方法。不同的学科领域,对应着不同的数学模型,从某种意义上讲,不同学科的发展过程就是建立它的数学模型的过程。建立数学模型有两种方法:即解析法和系统辨识。 L. A. Zadeh于1962年给辨识提出了这样的定义:“辨识就是在输入和输出数据的基础上,从一组给定的模型类中,确定一个与所测系统等价的模型。”当然按照Zadeh的定义,寻找一个与实际过程完全等价的模型无疑是非常困难的。根据实用性观点,对模型的要求并非如此苛刻。1974年,P. E. ykhoff给出辨识的定义“辨识问题可以归结为用一个模型来表示客观系统(或将要构造的系统) 本质为: 特征的一种演算,并用这个模型把对客观系统的理解表示成有用的形式。而1978
系统辨识考试答案
2.描述用随机信号测试线性系统的动态响应的原理与方法。
用伪随机噪声作为输入测试系统的动态响应: 伪随机信号的自相关函数是周期为 T 的周期函数,其互相关函数为: R x y ( ) T 0 g( )R ( )d x 2T g( )R T x ( ) d ..... kg( ) kg(T ) ...... T >系统的脉冲响应时间时, g(T ) =0,? ,则R ( ) kg( ) xy ,与白噪声作输 入信号时结果相同,但此处R xy ( ) 的计算只需在0~T 一个周期的时间内进行 。 这就是采用伪随机信号测试系统动态特性的优越性。 用随机信号测试线性系统的动态响应的原理是相关滤波原理 利用随机信号测试线性系统的动态特性的理论基础是维纳一霍夫积分方程,即 R xy ( ) g( )R x ( )d = g ( ) R x ( ) 当系统输出端存在干扰n (t ) 时,系统的实际输出 y(t)与输入 x(t)的互相关函 数为: R xy ( ) E{ x(t) y(t )} E{ x(t )[ z(t ) n(t ) ] } R xz ( ) R xn ( ) 为了测试系统的动态响应特性,选用与测量噪声 n(t)无关的激励信号 x(t), 即 x(t)与 n(t)无关,故其互相关函数 R xn ( ) =0,所以 R xy ( ) R xz ( ) ,即实际输入 与输出 (带测量噪声 )的互相关函数 R ( ) 等价于真实输入与输出 (不带测量噪声 ) xy
的互相关函数 R ( ) 。这就是相关滤波原理。利用相关滤波原理测试测试线性系 xz 统的动态响应的突出优点是抗干扰能力强。 用白噪声作为输入测试系统的动态响应: 维纳一霍夫积分方程变为: R xy ( ) g ( )R x 0 ( )d g ( )k ( )d kg( ) 0 可见,当输入为自噪声时,系统输入输出的互相关函数 R ( ) 与脉冲响应函 xy 数 g ( )成正比。白噪声输入时对系统的正常工作影响不大, 但要求较长的观测时 间。 用伪随机噪声作为输入测试系统的动态响应: 伪随机信号的自相关函数是周期为 T 的周期函数,其互相关函数为: R x y ( ) T 0 g( )R ( )d x 2T g( )R T x ( ) d ..... kg( ) kg(T ) ...... T >系统的脉冲响应时间时, g(T ) =0,? ,则 R ( ) kg( ) xy ,与白噪声作输 入信号时结果相同,但此处 R ( ) 的计算只需在 0~T 一个周期的时间内进行。 xy 这就是采用伪随机信号测试系统动态特性的优越性。 3. 为什么说最小二乘法是系统辨识的基本方法,该方法的主要特点是什么? 最小二乘法是一种经典的数据处理方法, 在系统辨识和参数估计领域中有着 广泛应用。 既可用于动态系统也可用于静态系统, 既可用于线性系统也可用于非 线性系统。 既可用于离线估计也可用于在线估计, 既可用于参数模型的辨识也可 用于非参数模型的辨识。 系统辨识中的许多估计算法不能解决问题时, 都可以用 最小二乘法的步骤来解释, 在原则上可以将许多辨识方法与最小二乘法组合便于 统一处理,所以说最小二乘法是系统辨识的基本方法。 主要特点:利用最小二乘法时,计算原理简单,容易理解,不要求观测数据 提供其概率统计方面的信息, 而其估计结果却在一个比较实际而广泛的条件下有 着最佳的统计学特性:即一致性、无偏性和有效性。 4.结合所从事的研究工作,阐述系统辨识技术的实际应用 在自动控制系统中, 对所研究的较复杂的对象往往要求通过观测和计算来定 量地判明其内在规律, 为此必须建立所研究对象的数学模型, 从而进行分析、 设 计、预测、控制的决策。有些被控对象由于其复杂性,很难用理论分析的方法得 到数学模型, 而系统辨识技术就是要确定被控对象的数学模型问题, 由此在自动
系统辨识与参数估计习题
系统辨识与参数估计课程习题 一、 选择题:答案唯一,在( )内填入正确答案的编号。 1. 对于批量最小二乘格式L L L E Y +θΦ=,其最小二乘无偏估计的必要条件是( )。 A. 输入序列}{k u 为“持续激励”信号 B. L E 与T L L T L ΦΦΦ-1)(正交 C. L E 为非白噪声向量 D. 0}{=L E E 2. 对象模型为T k k k y e ?θ=+时,采用递推最小二乘估计后的残差序列的计算式为 ( )。 A. 1?T k k k k y ε?θ-=- B. 1?T k k k k y ε?θ-=- C. ?T k k k k y ε?θ=- D. 11?T k k k k y ε?θ--=- 3. 在上题的条件下,递推最小二乘算法中的增益矩阵k K 可以写成( )。 A. 11k k P ?-- B. 1k k P ?- C. 1k k P ?- D. k k P ? 4. 可以同时得到对象参数和干扰噪声模型参数的估计算法是( )。 A. 辅助变量法 B. 广义最小二乘法 C. 最小二乘限定记忆法 D. 相关最小二乘两步法 5. 增广最小二乘估计的关键是( )。 A. 将控制项增广进k ?中,并用残差项取代进行估计 B. 将输出项增广进k ?中,并用残差项取代进行估计 C. 将噪声项增广进k ?中,并用残差项取代进行估计 D. 将噪声项增广进k ?中,并用输出项取代进行估计 答案:1. B 2. C 3. D 4. B 5. C ■ 二、 判断题:以○表示正确或×表示错误。
1.估计残差平方和最小是确定辨识过程对象结构的唯一标准。( ) 2.最小二乘估计的批量算法和递推算法在数学上是等价的。( ) 3.广义最小二乘法就是辅助变量法和增广最小二乘法交替试用。( ) 4.在递推最小二乘算法中,若置0>==T k P P P ,则该算法也能克服“数据饱和” 现象,进而可适用于时变系统。( ) 5.用神经网络对SISO 非线性系统辨识,采用的是输入层和输出层均为一个神经元的三层前馈神经元网络结构。( ) 答案:1. × 2. ○ 3. × 4. ○ 5. × ■ 三、 设y 和n 21x ,x ,x Λ之间满足关系)x a x a x a (ex p y n n 2211+++=Λ,试图利用y 和 n 21x ,x ,x Λ的观测值来估计参数n 21a ,a ,a Λ,请将该模型化成最小二乘格式。 答案:θ?T n n 2211x a x a x a ln(y)z =+++==Λ 其中,[][]n 21T n 21T x ,,x ,x a ,,a ,a ΛΛ==?θ ■ 四、 对于多输入单输出(MISO )系统可由下面的模型描述 k k k e u z B y z A +=---111)()( 其中,k u 为系统的m ×1维输入向量;k y 为系统的标量输出;k e 为标量i.i.d 随机噪 声;1 -z 为延迟算子,即11--=k k y y z ;)(1-z A 为标量参数多项式,)(1-z B 为1×m 的 参数多项式向量: a a n n z a z a z A ---+++=Λ.1)(111 b b n n z B z B B z B ---+++=Λ.)(1101 请写出:最小二乘递推算法公式和计算步骤或流程。 答案: 根据题意,可写出最小二乘格式为: k T k k e y +=θ? 其中, []T n k T k T k n k k k T k b a u u u y y y 12121,,;,,----------=ΛΛ? 1201,,,;,,,a b T n n a a a B B B θ??=??L L 因此,采用批量最小二乘法估计时,设采集数据时刻为k=1,2,…,L ,则有批量最小二乘格式为:
系统辨识介绍
系统辨识 系统辨识是研究如何用实验研究分析的办法来建立待求系统数学模型的一门学科。Zadeh(1962)指出:“系统辨识是在输入和输出数据的基础上,从一类模型中确定一个与所观测系统等价的模型”。Ljung(1978)也给出如下定义:“系统辨识有三个要素——数据、模型类和准则,即根据某一准则,利用实测数据,在模型类中选取一个拟合得最好的模型”。实际上,系统的数学模型就是对该系统动态本质的一种数学描述,它向人们提示该实际系统运行中的有关动态信息。但系统的数学模型总比真实系统要简单些,因此,它仅是真实系统降低了复杂程度但仍保留其主要特征的一种近似数学描述。 建立数学模型通常有两种方法,即机理分析建模和实验分析建模。机理分析建模就是根据系统内部的物理和化学过程,概括其内部变化规律,导出其反映系统动态行为并表征其输入输出关系的数学方程(即机理模型)。但有些复杂过程,人们对其复杂机理和内部变化规律尚未完全掌握(如高炉和转炉的冶炼过程等)。因此,用实验分析方法获得表征过程动态行为的输入输出数据,以建立统计模型,实际上是系统辨识的主要方面,它可适用于任何结构的复杂过程。 系统辨识的主要步骤和内容有以下几个方面。 1、辨识目的 根据对系统模型应用场合的不同,对建模要求也有所不同。例如,对理论模型参数的检验及故障检测和诊断用的模型则要求建得精确些。而对于过程控制和自适应控制等用的模型的精度则可降低一些,因为这类模型所关心的主要是控制效果的好坏,而不是所估计的模型参数是否收敛到真值。 2、验前知识 验前知识是在进行辨识模型之前对系统机理和操作条件、建模目的等了解的统称。有些场合为了获得足够的验前知识还要对系统进行一些预备性的实验,以便获得一些必要的系统参数,如系统中主要的时间常数和纯滞后时间,是否存在非线性,参数是否随时间变化,允许输入输出幅度和过程中的噪声水平等。 3、实验设计 实验设计的主要内容是选择和决定:输入信号的类型、产生方法、引入点、采样周期、在线或离线辨识、信号的滤波等。由于实际中对实验条件存在种种限制,如对输入和输出的幅度、功率、变化率的限制,最大采样速度的限制,实验进行时间、次数或能够取得的和用于建模的样本总个数的限制等。因此,怎样在这些限制条件下设计实验,以便在尽可能短的时间获得尽可能多的能反映系统本质特性的有用信息,是实验设计的中心任务。 4、模型类别的确定 为确定模型类别,需要在验前知识的基础上做必要的假定,即确定系统数学模型的具体表达形式。一般是根据对象的性质和控制的方法决定用微分方程还是用差分方程,脉冲响应函数还是用状态方程,线性模型还是非线性模型,定常参数模型还是时变参数模型,随机模型还是确定性模型,单一模型还是多层混杂模型等等,这就是所谓模型类别的确定问题。数学模型的具体表达形式确定后,才能进一步确定系统模型的参数。
系统辨识综述
系统辨识方法综述 摘要 在自然和社会科学的许多领域中,系统的设计、系统的定量分析、系统综合及系统控制,以及对未来行为的预测,都需要知道系统的动态特性。在研究一个控制系统过程中,建立系统的模型十分必要。因此,系统辨识在控制系统的研究中起到了至关重要的作用。本文论述了用于系统辨识的多种方法,重点论证了经典系统辨识方法中运用最广泛的的最小二乘法及其优缺点,引出了将遗传算法、模糊逻辑、多层递阶等知识应用于系统辨识得到的一些现代系统辨识方法,最后总结了系统辨识今后的发展方向。 关键字:系统辨识;最小二乘法;遗传算法;模糊逻辑;多层递阶 Abstract In many fields of natural and social science, the design of the system, the quantitative analysis of the system, the synthesis of the system and the control of the system, as well as the prediction of the future behavior, all need to know the dynamic characteristics of the system. It is very necessary to establish a system model in the process of studying a control system. Therefore, system identification plays an important role in the research of control system. This paper discusses several methods for system identification, the key argument is that the classical system identification methods using the least squares method and its advantages and disadvantages, and leads to the genetic algorithm, fuzzy logic, multi hierarchical knowledge application in system identification of some modern system identification method. Finally, the paper summarizes the system identification in the future direction of development. Keywords:System identification; least square method; genetic algorithm; fuzzy logic; multi hierarchy 第一章系统辨识概述 系统辨识是研究建立系统数学模型的理论和方法。系统辨识是建模的一种方法,不同的学科领域,对应着不同的数学模型。从某种意义上来说,不同学科的发展过程就是建立他的数学模型的过程。辨识问题可以归结为用一个模型来表示客观系统(或将要构造的系统)本质牲征的一种演算,并用这个模型把对客观系统的理解表示成有用的形式。当然也可以有另外的描述,辨识有三个要素:数据,模型类和准则。辨识就是按照一个准则在一组模型类中