自适应光学技术
自适应光学技术
姜文汉
中国工程院院士,中国科学院光电技术研究所,成都610209
关键词 自适应光学 波前探测 波前控制 波前校正 高分辨力成像 激光核聚变 人眼视网膜
动态光学波前误差是困扰光学界几百年的老问题,自适应光学技术提供了解决这一难题的途径。自适应光学通过对动态波前误差的实时探测 控制 校正,使光学系统能够自动克服外界扰动,保持系统良好性能。本文在说明自适应光学技术的基本原理后,介绍由中国科学院光电技术研究所研制的三套自适应光学系统及其使用结果:1.2m 望远镜天体目标自适应光学系统, 神光I 激光核聚变波前校正系统和人眼视网膜高分辨力成像系统。
1自适应光学 自动校正光学波前
误差的技术
从1608年利普赛(L i ppers hey)发明光学望远镜,
1609年伽里略(G alileo)第一次用望远镜观察天体以来
已经过去了近400年了,望远镜大大提高了人类观察遥
远目标的能力,但是望远镜发明后不久,人们就发现大
气湍流的动态干扰对光学观测有影响。大气湍流的动
态扰动会使大口径望远镜所观测到的星像不断抖动而
且不断改变成像光斑的形状。1704年牛顿(I.N e w ton)
在他写的《光学》[1]一书中,就已经描述了大气湍流使像
斑模糊和抖动的现象,他认为没有什么办法来克服这一
现象,他说: 唯一的良方是寻找宁静的大气,云层之上
的高山之巅也许能找到这样的大气 。天文学家们以极
大的努力寻找大气特别宁静的观测站址。但即使在地
球上最好的观测站,大气湍流仍然是一个制约观测分辨
率的重要因素。无论多大口径的光学望远镜通过大气
进行观察时,因受限于大气湍流,其分辨力并不比0.1~
0.2m的望远镜高。从望远镜发明到20世纪50年代的
350来年中,天文学家和光学家像谈论天气一样谈论大
气湍流,而且还创造了Seei ng这个名词来描述大气湍流
造成星像模糊和抖动的现象,但是对Seei ng的影响还是
无能为力。
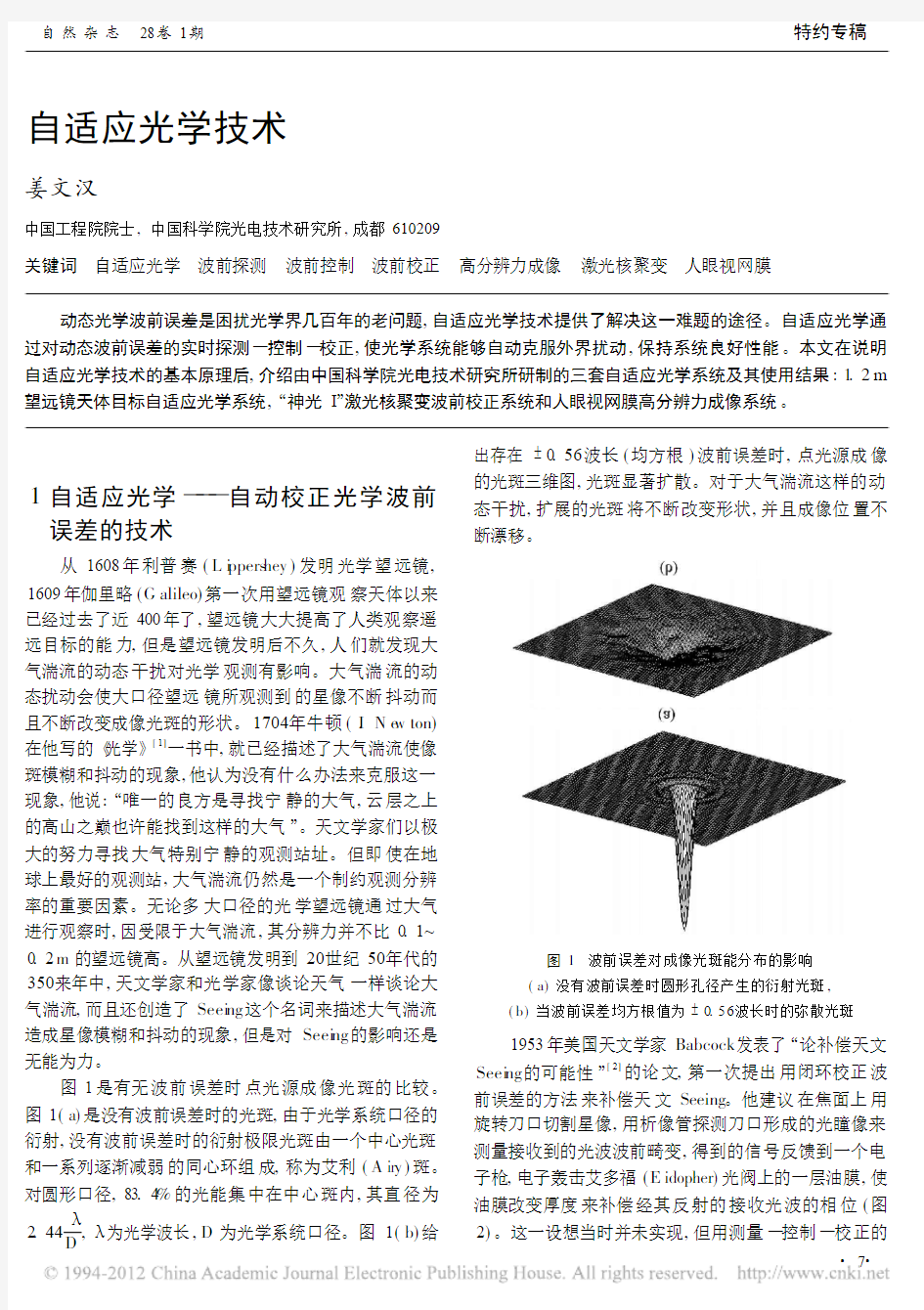
图1是有无波前误差时点光源成像光斑的比较。
图1(a)是没有波前误差时的光斑,由于光学系统口径的
衍射,没有波前误差时的衍射极限光斑由一个中心光斑
和一系列逐渐减弱的同心环组成,称为艾利(A ir y)斑。
对圆形口径,83.4%的光能集中在中心斑内,其直径为
2.44
D
, 为光学波长,D为光学系统口径。图1(b)给
出存在 0.56波长(均方根)波前误差时,点光源成像
的光斑三维图,光斑显著扩散。对于大气湍流这样的动
态干扰,扩展的光斑将不断改变形状,并且成像位置不
断漂移。
图1 波前误差对成像光斑能分布的影响
(a)没有波前误差时圆形孔径产生的衍射光斑,
(b)当波前误差均方根值为 0.56波长时的弥散光斑
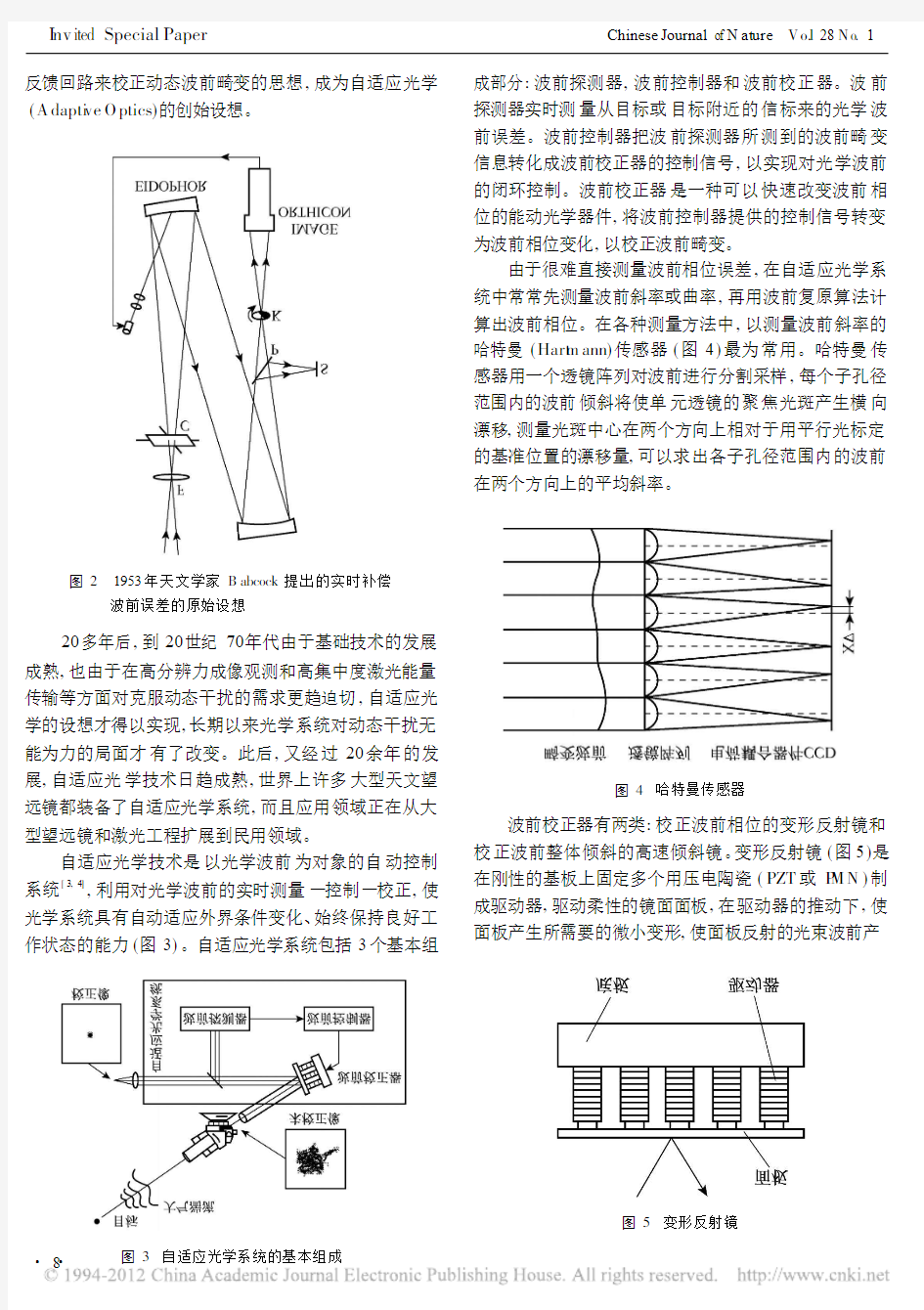
1953年美国天文学家Babcock发表了 论补偿天文
Seei ng的可能性 [2]的论文,第一次提出用闭环校正波
前误差的方法来补偿天文Seeing。他建议在焦面上用
旋转刀口切割星像,用析像管探测刀口形成的光瞳像来
测量接收到的光波波前畸变,得到的信号反馈到一个电
子枪,电子轰击艾多福(E idopher)光阀上的一层油膜,使
油膜改变厚度来补偿经其反射的接收光波的相位(图
2)。这一设想当时并未实现,但用测量 控制 校正的
7
反馈回路来校正动态波前畸变的思想,成为自适应光学(A dapti ve O ptics)
的创始设想。
图2 1953年天文学家B abcock 提出的实时补偿
波前误差的原始设想
20多年后,到20世纪70年代由于基础技术的发展成熟,也由于在高分辨力成像观测和高集中度激光能量传输等方面对克服动态干扰的需求更趋迫切,自适应光学的设想才得以实现,长期以来光学系统对动态干扰无能为力的局面才有了改变。此后,又经过20余年的发展,自适应光学技术日趋成熟,世界上许多大型天文望远镜都装备了自适应光学系统,而且应用领域正在从大型望远镜和激光工程扩展到民用领域。
自适应光学技术是以光学波前为对象的自动控制系统
[3,4]
,利用对光学波前的实时测量 控制 校正,使
光学系统具有自动适应外界条件变化、始终保持良好工作状态的能力(图3)。自适应光学系统包括3
个基本组
图3 自适应光学系统的基本组成
成部分:波前探测器,波前控制器和波前校正器。波前探测器实时测量从目标或目标附近的信标来的光学波前误差。波前控制器把波前探测器所测到的波前畸变信息转化成波前校正器的控制信号,以实现对光学波前的闭环控制。波前校正器是一种可以快速改变波前相位的能动光学器件,将波前控制器提供的控制信号转变为波前相位变化,以校正波前畸变。
由于很难直接测量波前相位误差,在自适应光学系统中常常先测量波前斜率或曲率,再用波前复原算法计算出波前相位。在各种测量方法中,以测量波前斜率的哈特曼(Hart m ann)传感器(图4)最为常用。哈特曼传感器用一个透镜阵列对波前进行分割采样,每个子孔径范围内的波前倾斜将使单元透镜的聚焦光斑产生横向漂移,测量光斑中心在两个方向上相对于用平行光标定的基准位置的漂移量,可以求出各子孔径范围内的波前在两个方向上的平均斜率。
图4 哈特曼传感器
波前校正器有两类:校正波前相位的变形反射镜和校正波前整体倾斜的高速倾斜镜。变形反射镜(图5)是在刚性的基板上固定多个用压电陶瓷(PZT 或P M N )制成驱动器,驱动柔性的镜面面板,在驱动器的推动下,使面板产生所需要的微小变形,使面板反射的光束波前产
图5 变形反射镜
8
生变化。高速倾斜镜是用压电驱动器推动刚性的镜面,产生两轴的倾斜,从而改变反射光束的方向。自适应光学系统中的波前校正器要求有很高的分辨力(10纳米或10纳弧度量级)和很快的响应速度(毫秒量级)。 自适应光学系统是将反馈控制用于光学系统内部。但与一般的控制系统相比,有如下的特点:控制对象是光学波前,控制的目标是要达到良好的光学质量,控制精度为1/10光波波长即数十纳米量级,控制通道数从几十到上百个,控制带宽达几百赫兹,可利用的光能有时非常弱,常常要用光子计数的方式进行波前探测。这
些特点带来一系列特殊的技术问题,也是自适应光学技术的难点之所在。
中国科学院光电技术研究所于1979年在我国率先开始研究自适应光学。二十余年来,建立了基础技术,研制成功多套自适应光学系统。下面将简要介绍我们建立的几套不同结构和用途的自适应光学系统。
2自适应光学提高对天体目标成像的分辨力
由中国科学院光电技术研究所研制的1.2m 望远镜自适应光学系统
[5]
用于天文目标观测。该套系统安
置在云南天文台1.2m 望远镜上,在全口径上实现大气湍流动态波前误差的实时校正,实现对星体目标的高分辨力成像。系统原理结构如图6所示,主要由望远镜、自适应光学系统、精密跟踪系统和成像系统4部分
组成。
图6 云南天文台1.2m 望远镜的自适应光学系统
望远镜具有地平式机架,绕俯仰和方位两轴旋转以跟踪天体目标。望远镜的光学系统口径为1.2m,为库
德(Coude)式结构,光路经主镜和次镜后由反射镜导向,分别穿过俯仰轴和方位轴,传到位于望远镜下方的库德房,自适应光学和成像系统都在库德房内的平台上。为了提高对目标的跟踪精度,设置了两级精跟踪系统,以补偿地平式机架的跟踪误差和大气湍流造成的波前整体倾斜误差。第一级精跟踪系统的倾斜镜是在俯仰轴头的45 反射镜,并在方位轴顶部的45 反射镜处进行分光,一部分光透过45 反射镜进入精跟踪传感器,由像增强电荷耦合器件(I CCD )探测器进行跟踪误差探测。跟踪误差(星像光斑重心位移)计算和控制算法计算由高速数字信号处理器完成,其输出经过高压放大器放大后控制前述高速倾斜镜进行跟踪误差校正。
自适应光学系统由61单元变形反射镜、哈特曼传感器和波前处理机组成。哈特曼传感器同时进行自适应光学系统的波前误差和第二级精跟踪误差的探测,由60个六角形的子孔径构成。哈特曼传感器子孔径与变形反射镜驱动器的布局见图7。采用高量子效率、低噪声、高帧频电荷耦合器件(CCD )作为探测器。哈特曼光斑中心计算、波前复原计算和控制算法计算由专用数字信号处理器完成。哈特曼传感器得到的波前整体平均斜率数据用来控制第二级高速倾斜镜进行第二级精跟踪控制,进一步校正波前倾斜,减少星像抖动。波前校正后的图像由成像CCD
探测。
图7 1.2m 望远镜自适应光学系统的变形镜驱动
器与哈特曼子孔径的布局关系
图8是系统对亮度为3.3星等的星体3种不同校正状态的成像光强分布,系统未校正时,光斑宽度1.12arc -sec ;只加倾斜校正的长曝光像,光斑宽度0.49arcsec ;倾斜和波前校正系统都闭环时的长曝光像,光斑宽度0.20arcsec ;为衍射极限的1.3倍,已接近衍射极限成像。
9
3激光核聚变装置波前校正系统提高
了激光能量集中度
激光核聚变装置波前校正系统于1985研制
[6,7]
,采
用爬山法优化原理,用于中国科学院上海光学与精密机械研究所的 神光Ⅰ 激光核聚变装置上。这是国际上激光核聚变装置中第一套自适应光学系统。
神光Ⅰ 激光核聚变装置,是由两路钕玻璃固体激光器组成的一个庞大的装置。该装置由一个功率不大的激光器发出的一个激光脉冲经过多级氙灯泵浦的放
大器逐级放大,到光路末端形成口径达200mm 、脉冲功
率可达1012
瓦的高功率激光,将这束激光引入一个真空靶室并聚焦到靶室中央的靶球上引发核聚变。 整个系统十分庞大复杂(图9),每条光路总长度达到几十米,有一百多个光学表面,激光通过的光学材料的总厚度超过3m 。尽管已经在光学材料、光学加工和装调方面采取许多措施来保证精度,但由于光路长、光学表面多,光学表面加工误差和材料不均匀性的积累仍然产生可观的静态波前误差,使聚焦光斑弥散,靶面上能量集中度降低。为了校正这一套庞大系统的光学误
差,
研制了这一套激光波前校正系统。
图8 1.2m 望远镜自适应光学系统对星体校正前后的焦斑光强三维图(a)未校正长曝光像,(b)倾斜校正长曝光像,(c)
倾斜和波前校正长曝光像
图9 神光Ⅰ 激光核聚变装置中的激光波前校正系统
如图9所示,在光路的起始端引入一束与主激光波
长相同、方向一致的小功率连续激光,利用这一束激光作为光源进行校正,在光路的中段设置一个19单元的变形反射镜作为波前校正器。由于这一系统的目的是校正 神光Ⅰ 装置的静态误差,可以用较慢的速度完成
校正过程,因而采用了串行工作的爬山法优化方法。在光路末端通过一个分光镜将光引向一个聚焦透镜,在它的焦面上设置一个针孔,用光电倍增管探测通过针孔的激光能量作为优化判据。在脉冲激光正式工作之前,注入小功率连续激光,进行爬山法优化,在变形反射镜驱
10
动器上施加高频小振幅电压产生试验扰动,当一个驱动器上施加高频振动时,通过针孔的激光能量受到调制,光电倍增管探测这一调制信号,并与驱动信号进行比相,比相信号的极性表明应施加校正电压的方向,在这个方向上不断施加校正电压,直到比相信号改变极性时为止。此时通过针孔的激光能量达到极大值。在各个驱动器上连续进行这一过程,经过三到四个周期,整个系统的波前误差就可以得到校正,焦斑能量集中度显著提高。图10就是该系统校正前后的静态焦斑的光强分布图,可以看到,校正前焦斑是长形的,表明这一系统中
的波前误差是以像散为主,校正后成为接近衍射极限的圆形光斑,中心光强约为校正前的3
倍。
图10 神光Ⅰ 装置经自适应光学系统校正前后的静态焦斑。(a)校正前,显示系统有较大像散;(b)校正后,接近衍射极限,中心光强约为校正前的3倍。
4人眼视网膜成像自适应光学系统实现细胞尺度的观测
人眼作为光学系统是不完美的,除了大家都熟知的近(远)视和散光之外,还存在高阶像差。无论从内向外
观察外部世界还是从外向内观察眼底,这些像差使分辨力都没有达到由瞳孔直径和视觉细胞尺度所决定的极限。近年来,自适应光学技术应用到眼科,成为国际上视觉科学和自适应光学技术研究的热点。中国科学院光电技术研究所在成功研制出微小变形镜的基础上,研制了视网膜高分辨率观测用的自适应光学系统[8]
,并获
得了视网膜高分辨率图像。
如图11所示,人眼高分辨率成像自适应光学系统由人眼像差校正自适应光学系统和照明成像光学系统两部分组成。为测量人眼波前误差,必须在眼底形成一个发光点(信标),从这一信标发出经瞳孔出射的光束的波前误差即是被测人眼的像差。用半导体激光器产生这一信标,激光器的输出经空间滤波器和扩束镜后准直成平行光,再经反射镜和分光镜后入射进被测人眼,经人眼聚焦后在眼底形成信标光点。经眼底视网膜后向反射的信标光再由瞳孔出射,带有眼睛像差的信息,经分光镜、扩束望远镜、变形反射镜、缩束望远镜,再经分光镜反射后,
进入哈特曼波前传感器。
图11 人眼高分辨率成像自适应光学系统
波前传感器测量出子孔径光斑位置,由计算机采集
并计算出每一子孔径的波前斜率,再经波前复原和控制算法的计算,得到变形反射镜每一驱动器的控制信号。这一控制信号由高压放大器放大后驱动变形反射镜实现波前校正的闭环控制。经过20~30次迭代,残余波前误差经校正达到极小,系统实现稳定校正。此时计算机触发闪光灯经光学系统照明视网膜成像区域。视网膜后向反射的照明光沿信标光同一光路并通过分光镜到达成像CCD 相机,摄取视网膜图像。
自适应光学系统采用的变形反射镜驱动器和波前传感器子孔径的布局见图12。97个方形子孔径排成11
11
图12 变形反射镜驱动器和波前传感器子孔径的
布局
11阵列,与37个驱动器匹配。为拍摄视网膜不同位置的图像,设置了一块带有小孔阵列的靶板,不同位置的小孔可以单独照明,被测者凝视被照明小孔时,眼底的中心凹对准此小孔,眼球产生对仪器光轴不同的偏转,而CCD 拍摄的是光轴区域,这样就可以获取视网膜不同横向位置的图像。靶板的视场为 6 6 。 对22个受试者校正前后前35阶泽尼克(Z erni ke)波前模式波前误差均方根值的平均值示于图13。可以看到,系统对前20阶波前误差有校正作用。对眼底视网膜视觉细胞的成像结果见图14,未校正前不能分辨的视觉细胞在校正后能清楚分辨。图15是离视网膜黄斑中心凹不同偏角的视觉细胞图,测量结果,中心凹正中和偏离中心凹2 和4 区域的视觉细胞直径分别为3.3 m,5.1 m 和6.9 m,表明偏离中心凹愈远,视觉细
胞的密度愈低。
图13 22个人眼校正前后波前误差的前35
阶泽尼克波前误差均方根值的均值
图14 自适应光学系统校正前(a)和校正后(b)的视网膜图像
视网膜是由多层组织构成的,厚度为百余微米,为获取不同层次组织的图像,CCD 相机可沿轴向调焦,使CCD 成像面共轭于不同深度的视网膜组织上。在离视觉细胞81~91 m 处,可以清晰获取毛细血管图像。图16是两个不同横向位置
上的图像,可以清楚看到毛细血管和内部的血球。
由于人眼是人类唯一可以从外部对深部组织进行无损观察的器官,这一技术将为视觉生理研究和疾病的早期诊断提供前所未有的有力工具。
12
图15
相对于黄斑中心凹不同偏离量的视网膜细胞图像
图16 黄斑中心凹周围的毛细血管图
5结语
自适应光学技术具有实时克服光学系统各种动、静态误差的影响,保持系统工作在最佳状态的能力,使其
不仅仅可用于上述几个方面,而且在其他领域也有许多应用。如在激光大气传输的动态误差校正,精密跟踪精度的提高,激光加工中的光束稳定、净化和整形,大型航天望远镜由温度变化和失重造成变形的补偿,自由空间激光通信大气扰动的补偿,以及医学光学仪器的分辨力提高等。随着相关技术的进步和单元技术的突破,尤其是用微电子、微机械和微光学技术制造的小型或微型的、成本低廉的单元器件(如阵列透镜,变形反射镜)的实现,自适应光学技术的应用范围将大大扩展。 此外,自适应光学的单元技术可以在更多领域中获得应用。如微位移驱动定位技术可以产生几十微米级的位移行程、纳米级的位移分辨率和毫秒级的响应速度,这在许多需要精密定位的领域中是十分需要的技术。自适应光学系统中的波前校正器,包括变形反射镜、高速倾斜镜和精密光学平移器,可以分别单独用于光学波前、光束方向和光程的精密调节,可以在多种激光和光学系统中用于光腔调整、精密跟踪和快速扫描,以及其他需要进行精密波前调整的场合。波前传感器技术如哈特曼波前探测器不仅是方便可靠的波前测量设备,还是一种性能非常好的光学测试仪器,现场使用
时不需要精确的基准,因而抗干扰性强。如果采用高帧频的CCD 探测器,还可快速记录光场的时间变化,这样,哈特曼传感器可以同时记录下光场的强度和位相时空变化的全部信息,可以全面评价激光器的光束质量,测量光学特性的动态变化,为分析被测系统提供完整的光场数据。
总之,以克服大气湍流对望远镜成像的干扰为主要
目的发展起来的自适应光学技术,正在十分迅速地向各个应用领域推广。相信在不久的将来,自适应光学技术将可以在许多方面开花结果,不仅在大型科学工程中发挥其独特的作用,而且将在日常生活中发现它存在的价值。(2005年11月7日收到)
1 TY SON R .Pri n ci p l es of Adap tive Op ti cs[M ].B oston s :A cade m ic
Press ,1991.
2 BAB COCK H W.Th e po s s i b ilit y of co m p ensati ng astronom i cal see -i ng [M ].Pub lication o f t h e A st ronom ical Soc i et y of t h e Paci fic ,
1953,65:229-236.
3 HARDY J W.Adapti ve O p ti cs fo r A strono m i cal T el escope [M ].N e w York:O xford ,1998.
4 姜文汉.现代仪器仪表技术与设计[M ].北京:科学出版社,2003,1049-1114.
5 RAO C,et a.l Perfor m an ce on t he 61-el e m ent upg raded adap tive
op tical s y st e m for 1.2-m e l es cope of the Y unn an O bservatory [C ].SPIE Proc .2004,5639:11-20.
6 姜文汉等.爬山法自适应光学波前校正系统[J ].中国激光,
1986,15:17-21.7 JI ANG W,e.t a.l H art m ann -Shack w avefron t sensing and w avefront
con tro l al gorit hm [C ].SPI E Proc .1990,1271:82-93.
8 凌宁等.用于活体人眼视网膜观察的自适应光学成像系统[J ].光学学报,2004,24:1153-1158.
Adaptive Optical Technol ogy Jiang W en -han
M e m ber,C hines e Acade m y of Eng i neeri n g,In stit u te o f Op tics and E-lectron i cs ,Ch i n ese Acade m y of Sci en ces ,C hengdu 610209K ey w ords adapti ve op tics ,w avefron t s en si ng ,w avefron t con tro,l w av efront correcti on ,h i gh res o l u tion i m agi n g ,l aser fusi on,hu m an eye s reti na
13
机器视觉技术发展现状文献综述
机器视觉技术发展现状 人类认识外界信息的80%来自于视觉,而机器视觉就是用机器代替人眼来做 测量和判断,机器视觉的最终目标就是使计算机像人一样,通过视觉观察和理解 世界,具有自主适应环境的能力。作为一个新兴学科,同时也是一个交叉学科,取“信息”的人工智能系统,其特点是可提高生产的柔性和自动化程度。目前机器视觉技术已经在很多工业制造领域得到了应用,并逐渐进入我们的日常生活。 机器视觉是通过对相关的理论和技术进行研究,从而建立由图像或多维数据中获机器视觉简介 机器视觉就是用机器代替人眼来做测量和判断。机器视觉主要利用计算机来模拟人的视觉功能,再现于人类视觉有关的某些智能行为,从客观事物的图像中提取信息进行处理,并加以理解,最终用于实际检测和控制。机器视觉是一项综合技术,其包括数字处理、机械工程技术、控制、光源照明技术、光学成像、传感器技术、模拟与数字视频技术、计算机软硬件技术和人机接口技术等,这些技术相互协调才能构成一个完整的工业机器视觉系统[1]。 机器视觉强调实用性,要能适应工业现场恶劣的环境,并要有合理的性价比、通用的通讯接口、较高的容错能力和安全性、较强的通用性和可移植性。其更强调的是实时性,要求高速度和高精度,且具有非接触性、实时性、自动化和智能 高等优点,有着广泛的应用前景[1]。 一个典型的工业机器人视觉应用系统包括光源、光学成像系统、图像捕捉系统、图像采集与数字化模块、智能图像处理与决策模块以及控制执行模块。通过 CCD或CMOS摄像机将被测目标转换为图像信号,然后通过A/D转换成数字信号传送给专用的图像处理系统,并根据像素分布、亮度和颜色等信息,将其转换成数字化信息。图像系统对这些信号进行各种运算来抽取目标的特征,如面积、 数量、位置和长度等,进而根据判别的结果来控制现场的设备动作[1]。 机器视觉一般都包括下面四个过程:
热成像技术原理及其应用
热成像技术原理及其应用(参考) 第一章导言 1 热成像系统技术基础 热成像系统能把物体发射的红外辐射(红外光)转变成可见光,从而将人类的视觉由可见光扩大到不可见红外光。人的眼睛不能响应0.4~0.7μm以外的光,要使人眼在夜间看东西象白天一样,使红外转换为可见景物的视觉判读成为可能,需目标相对背景有显著的发射率、温差和与大气窗口相一致的红外辐射传输通道;还需要一种光电器件能响应物体发射出的红外光子。 人眼是接受可见光辐射的最好敏感元件:眼睛的光谱响应范围0.4~0.7μm,正好符合太阳光源的输出峰值,这个波段集中了38%的太阳辐射能量,且地球上的物体具有良好的反射度;眼睛是一种理想的可见光波段量子噪声限探测器(量子能级的低噪声);人眼对非可见红外光有很好的滤波功能。 自然可见图像主要是由反射和反射度差产生。相反热像仪对红外光响应所形成的热图像主要是由发射率差产生。 目前热像仪工作的三个红外辐射传输的窗口是1μm~3μm,3μm~5μm,8μm~14μm。 2 热成像系统技术发展简述 最初的热成像系统是circa温度记录仪(1930);
1952年美国陆军制成第一台自动温度记录仪(采用双轴扫描和测辐射热探测器,照相胶卷记录图像),以后10年主要是民用; 1956年美国空军研制了第一台实时FLIR航扫仪(AN/A-AS-3),后发展改进研制了第一台二维图像的热像仪XA-1(单元扫描); 1960年Perkin-Elmer公司为陆军研制了地面FLIR(锑化铟、双折射棱镜扫描,5°视场、瞬时视场1mrad、帧频0.2); 1960~1974由空军和德克萨斯仪器公司及海军和休斯飞机公司分别制定扫描FLIR研制计划,研制完成60多种FLIR,产品几百件(试用于对北越轰炸); 到90年代初扫描型热像仪发展至顶盛,美国发展了采用64元、120元、180元制冷MTC探测器的热成像通用组件(以色列120元,英国32元和8条SPRITE探测器)同期世界上生产了约10万台热像仪(1代);80-90年代美国的标准组件计划是第一代红外热像仪(扫描型)发展的标志性事件。 九十年代末美国、法国(SOFRADIR)、英国、以色列相继研制并批量生产了非制冷焦平面探测器、制冷焦平面探测器,至此引发了一场热成像技术的革命,进入了2代热成像技术发展阶段。2000年,美国和法国的焦平面红外探测器产业化,这是第二代红外热像仪(凝视型)发展的标志性事件。2015年,低成本非制冷红外探测器产业化。 3 热成像系统工作原理 基本内容 辐射理论和目标识别 目标辐射的大气传输 热像仪指标体系 高效的红外光学系统 探测器及其工作条件(制冷、真空)
自由空间光通信的现状与发展趋势
自由空间光通信的现状与发展趋势 自由空间光通信的现状与发展趋势(一) 1 前言 20世纪90年代后期,随着全光接入网的发展,人们对传输速率的要求越来越高;随着通信范围的延伸,人们对快捷通信链路建立的兴趣进一步提高。自由空间光通信技术因其具有独到的优势,在固定无线宽带技术中,能为宽带接入的快速部署提供一种灵活的解决方案,又得到了极大的关注。其应用范围已从军用和航天逐渐迈入民用领域,其技术本身也在不断的完善中。 自由空间光通信可在以下一些范围发挥重要作用。1)可以作为光纤通信和微波通信冗余链路的备份;2)可以应用于移动通信基站间的互连,无线基站数据回传;3)应用于城域网的建设以及最后一公里接入;4)在技术上或经济上不宜敷设光缆的地区,在不宜采用或限制使用无线电通信的地方;5)在军事设施或其他要害部门需要严格保密的场合6)在企业内部网互连和数据传输。 2 自由空间光通信的基本原理及其特点
自由空间光通信系统(FSO)是以大气作为传输媒质来进行光信号的传送的。只要在收发两个端机之间存在无遮挡的视距路径和足够的光发射功率,通信就可以进行。 系统所用的基本技术是光电转换。在点对点传输的情况下,每一端都设有光发射机和光接收机,可以实现全双工的通信。光发射机的光源受到电信号的调制,并通过作为天线的光学望远镜,将光信号经过大气信道传送到接收端的望远镜。高灵敏度的光接收机,将望远镜收到的光信号再转换成电信号。由于大气空间对不同光波长信号的透过率有较大的差别,可以选用透过率较好的波段窗口。光的无线系统通常使用850nm或1550nm的工作波长。同时考虑到1500nm的光波对于雾有更强的穿透能力,而且人眼更安全,所以1550nm波长的FSO系统具有更广阔的使用前景。 自由空间光通信与微波技术相比,它具有调制速率高、频带宽、不占用频谱资源等特点;与有线和光纤通信相比,它具有机动灵活、对市政建设影响较小、运行成本低、易于推广等优点。自由空间光通信可以在一定程度弥补光纤和微波的不足。它的容量与光纤相近,但价格却低得多。它可以直接架设在屋顶,由空中传送。既不需申请频率执照,也没有敷设管道挖掘马路的问题。使用点对点的系统,在确定发收两点之间视线不受阻挡的通道之后,一般可在数小时之内安装完
空间激光通信研究现状及发展趋势
空间激光通信研究现状及发展趋势 前言:在即将到来的信息时代,构建信息传播速率快、信息传输量大、覆盖空间广阔的通信网络是很重要的。空间激光通信技术正是构建符合未来社会发展需求的通信网络的重要技术支持之一。我国的各大高校和科学研究机构都有对这一方面展开研究,比如武汉大学的静态激光通信、华中科技大学的对潜激光通信、中科院成都光电所的自适应激光通信、中电集团34所的大气静态激光通信等。空间激光通信的应用,有助于构建一体化的通信网络,对于我国发展具有深远的影响。 一、空间激光通信的技术特点 1.1光波频率高 空间激光通信就是利用激光进行信号传输的通信技术[1]。激光的频率比微波高出三到四个数量级。这就导致以激光为载波进行通信,能够利用的频带更加宽广,在短时间内传输大量的数据。在地球科学研究、环境灾害监测、军事信息获取等领域,经常需要在一段时间内实现海量数据的传输,空间激光通信就可以有效实现这一点。 1.2光波波长短 空间激光通信所运用的光波具有极短的波长。光波的波长决定了发射天线的口径。如果光波的波长较短,发射天线的口径也
会比较小,这样,激光在发射过程中就会相对集中,不容易发生分散,同时消耗的功率也比以往的微波发射低,节省更多的能源。不仅仅是发射天线,接收终端的型号也与光波的波长长短有关。利用短波长的光波进行信息传输,接收终端的体积、重量也可以相应缩小,同时消耗更低的能源。这种性质使得空间激光通信能够搭配多种通信平台,适用范围极为广阔。 1.3方向性强 空间激光通信发射的激光光束很窄,指向明确,能够直达目的地,很少发生散射[2]。以往的微波通信,光束宽,指向性不明显,容易发生散射和折射,影响通信的效果,导致通信不稳定。空间激光通信就将这一问题进行极大程度的改善。另外,空间激光通信还具有防窃听的能力,在传输过程中不容易被外界窃取信息,在保证了通信的稳定性的同时,也保证了通信的保密性。 1.4波段远离电磁波谱 如果通信光波的波段距离电磁波谱较近,就容易在传输的过程中受到电磁波谱的干扰。所以,空间激光通信采取远离电磁波谱的光波波段。在机场、战争区域等环境中,电磁波谱的干扰极为严重,只有利用空间激光通信才能够确保信息的顺利传输。 二、空间激光通信的关键技术 2.1激光调制发射技术 激光调制发射技术具有高功率和高速率的特点。这种技术的主要组成部件有激光器、驱动器、温度控制、功率控制、光放大
几何光学的基本原理
第三章几何光学 本章重点: 1、光线、光束、实像、虚像等概念; 2、Fermat原理 3、薄透镜的物像公式和任意光线的作图成像法; 4、几何光学的符号法则(新笛卡儿法则); 本章难点: 5、理想光具组基点、基面的物理意义; §3.1 几何光学的原理 几何光学的三个实验定律: 1、光的直线传播定律——在均匀的介质中,光沿直线传播; 2、光的独立传播定律——光在传播过程中与其他光束相遇时,不改变传播方 向,各光束互不受影响,各自独立传播。 3、光的反射定律和折射定律 当光由一介质进入另一介质时,光线在两个介质的分界面上被分为反射光线和折射光线。 反射定律:入射光线、反射光线和法线在同一平面内,这个平面叫做入射面,入射光线和反射光线分居法线两侧,入射角等于反射角 光的折射定律:入射光线、法线和折射光线同在入射面内,入射光线和折射光线分居法线两侧,介质折射率不仅与介质种类有关,而且与光波长有关。 §3.2 费马原理 一、费马原理的描述:光在指定的两点间传播,实际的光程总是一个极值(最大值、最小值或恒定值)。 二、表达式 ,(A,B是二固定点) Fermat原理是光线光学的基本原理,光纤光学中的三个重要定律——直线传播定律,反射定律和折射定律()——都能从Fermat原理导出。 §3.3 光在平面界面上的反射和折射、光学纤维 一、基本概念:单心光束、实像、虚像、实物、虚物等 二、光在平面上的反射 根据反射定律,可推导出平面镜是一个最简单的、不改变光束单心性的、能成完善像的光学系统. 三、单心光束的破坏(折射中,给出推导) 四、全反射 1、临界角
2、全反射的应用 全反射的应用很广,近年来发展很快的光学纤维,就是利用全反射规律而使光线沿着弯曲路程传播的光学元件。 2、应用的举例(棱镜) §3.4 光在球面上的反射和折射 一、基本概念 二、符号法则(新笛卡儿符号法则) 在计算任一条光线的线段长度和角度时,我们对符号作如下规定: 1、光线和主轴交点的位置都从顶点算起,凡在顶点右方者,其间距离的数值为正,凡在顶点左方者,其间距离的数值为负。物点或像点至主抽的距离,在主轴上方为正,在下方为负。 2、光线方向的倾斜角度部从主铀(或球面法线)算起,并取小于π/2的角度。由主轴(或球面法线)转向有关光线时,若沿顺时针方向转,则该角度的数值为正;若沿逆时针方向转动时,则该角度的数值为负。 3、在图中出现的长度和角度只用正值。 三、球面反射对光束单心性的破坏 四、近轴光线条件下球面反射的物像公式 五、近轴光线条件下球面折射的物像公式(高斯公式) 六、高斯物像公式 七、牛顿物像公式(注意各量的物理意义) 八、例题一个折射率为1.6的玻璃哑铃,长20cm,两端的曲率半径为2cm。若在哑铃左端5cm处的轴上有一物点,试求像的位置和性质。 §3.5 薄透镜 一、基本概念: 凸透镜、凹透镜、主轴、主截面、孔径、厚透镜、薄透镜、物方焦平面、像方焦平面等 二、近轴条件下薄透镜的成像公式 如果利用物方焦距和像方焦距
自适应光学技术
自适应光学技术 姜文汉 中国工程院院士,中国科学院光电技术研究所,成都610209 关键词 自适应光学 波前探测 波前控制 波前校正 高分辨力成像 激光核聚变 人眼视网膜 动态光学波前误差是困扰光学界几百年的老问题,自适应光学技术提供了解决这一难题的途径。自适应光学通过对动态波前误差的实时探测 控制 校正,使光学系统能够自动克服外界扰动,保持系统良好性能。本文在说明自适应光学技术的基本原理后,介绍由中国科学院光电技术研究所研制的三套自适应光学系统及其使用结果:1.2m 望远镜天体目标自适应光学系统, 神光I 激光核聚变波前校正系统和人眼视网膜高分辨力成像系统。 1自适应光学 自动校正光学波前 误差的技术 从1608年利普赛(L i ppers hey)发明光学望远镜, 1609年伽里略(G alileo)第一次用望远镜观察天体以来 已经过去了近400年了,望远镜大大提高了人类观察遥 远目标的能力,但是望远镜发明后不久,人们就发现大 气湍流的动态干扰对光学观测有影响。大气湍流的动 态扰动会使大口径望远镜所观测到的星像不断抖动而 且不断改变成像光斑的形状。1704年牛顿(I.N e w ton) 在他写的《光学》[1]一书中,就已经描述了大气湍流使像 斑模糊和抖动的现象,他认为没有什么办法来克服这一 现象,他说: 唯一的良方是寻找宁静的大气,云层之上 的高山之巅也许能找到这样的大气 。天文学家们以极 大的努力寻找大气特别宁静的观测站址。但即使在地 球上最好的观测站,大气湍流仍然是一个制约观测分辨 率的重要因素。无论多大口径的光学望远镜通过大气 进行观察时,因受限于大气湍流,其分辨力并不比0.1~ 0.2m的望远镜高。从望远镜发明到20世纪50年代的 350来年中,天文学家和光学家像谈论天气一样谈论大 气湍流,而且还创造了Seei ng这个名词来描述大气湍流 造成星像模糊和抖动的现象,但是对Seei ng的影响还是 无能为力。 图1是有无波前误差时点光源成像光斑的比较。 图1(a)是没有波前误差时的光斑,由于光学系统口径的 衍射,没有波前误差时的衍射极限光斑由一个中心光斑 和一系列逐渐减弱的同心环组成,称为艾利(A ir y)斑。 对圆形口径,83.4%的光能集中在中心斑内,其直径为 2.44 D , 为光学波长,D为光学系统口径。图1(b)给 出存在 0.56波长(均方根)波前误差时,点光源成像 的光斑三维图,光斑显著扩散。对于大气湍流这样的动 态干扰,扩展的光斑将不断改变形状,并且成像位置不 断漂移。 图1 波前误差对成像光斑能分布的影响 (a)没有波前误差时圆形孔径产生的衍射光斑, (b)当波前误差均方根值为 0.56波长时的弥散光斑 1953年美国天文学家Babcock发表了 论补偿天文 Seei ng的可能性 [2]的论文,第一次提出用闭环校正波 前误差的方法来补偿天文Seeing。他建议在焦面上用 旋转刀口切割星像,用析像管探测刀口形成的光瞳像来 测量接收到的光波波前畸变,得到的信号反馈到一个电 子枪,电子轰击艾多福(E idopher)光阀上的一层油膜,使 油膜改变厚度来补偿经其反射的接收光波的相位(图 2)。这一设想当时并未实现,但用测量 控制 校正的 7
(完整版)光学仪器基本原理习题及答案
第四章 光学仪器基本原理 1.眼睛的构造简单地可用一折射球面来表示,其曲率半径为5.55mm ,内部为折射率等于4/3的液体,外部是空气,其折射率近似地等于1。试计算眼球的两个焦距。用右眼观察月球时月球对眼的张角为1°,问视网膜上月球的像有多大? 解;眼球物方焦距;当s ’=∞时,f=﹣5.55/﹙4/3﹣1﹚=﹣16.65㎜=﹣1.665㎝ 眼球的象方焦距:f '=s '=mm 2.2213455.534 =-? 当u=1°时,由折射定律n 1sinu 1=n 2sinu 2 U 1=1°n 1=1,n 2=4∕3 像高l '=f 'tanu 2=f 'sinu 2=f '×3∕4 sin1o =22.2×3∕4×0.01746=0.29mm 2.把人眼的晶状体看成距视网膜2㎝的一个简单透镜。有人能看清距离在100㎝到300㎝ 间的物体。试问:⑴此人看清远点和近点时,眼睛透镜的焦距是多少?⑵为看清25㎝远的物体,需配戴怎样的眼镜? 解:人眼s '=2cm. S 1=100cm.s 2=300cm 近点时透镜焦距'f =21002 100+?=1.961cm 远点时透镜焦距f '=23002 300+? =1.987cm 当s =﹣25cm 时s '=﹣100cm ﹦﹣1m 34125.0100.1111=+-=---=-'= Φs s D 300=度 3.一照相机对准远物时,底片距物镜18㎝,当镜头拉至最大长度时,底片与物镜相距20 ㎝,求目的物在镜前的最近距离? 解:.18.0m f =' m s 20.0=' 照相机成像公式: f s s '=-'1 11 556.020.01 18.01111-=+-='+'-=s f s m s 8.1-= 目的物在镜前的最近距离为m 8.1
热成像仪原理
热成像仪原理 热成像仪是利用红外探测器和光学成像物镜接受被测目标的红外辐射能量分布图形反映到红外探测器的光敏元件上,从而获得红外热像图,这种热像图与物体表面的热分布场相对应。通俗地讲热像仪就是将物体发出的不可见红外能量转变为可见的热图像。热图像的上面的不同颜色代表被测物体的不同温度。 热像仪的应用非常广泛,只要有温度差异的地方都有应用。比如:在建筑领域,检查空鼓、缺陷、瓷砖脱落、受潮、热桥等;在消防领域可以查找火源,判定事故的起因,查找烟雾中的受伤者;公安系统可以找夜间藏匿的人;汽车生产领域可以检测轮胎的行走性能、空调发热丝、发动机、排气喉等性能;医学可以检测针灸效果、早期发现鼻咽癌、乳腺癌等疾病;电力检查电线、连接处、快关闸、变电柜等。 热像仪是利用红外探测器和光学成像物镜接受被测目标的红外辐射能量分布图形反映到红外探测器的光敏元件上,从而获得红外热像图,这种热像图与物体表面的热分布场相对应。通俗地讲热像仪就是将物体发出的不可见红外能量转变为可见的热图像。热图像的上面的不同颜色代表被测物体的不同温度。 任何有温度的物体都会发出红外线,热像仪就是接收物体发出的红外线,通过有颜色的图片来显示被测量物表面的温度分布,根据温度的微小差异来找出温度的异常点,从而起到与维护的作用。一般也称作红外热像仪。 一.热像仪的发展 热像仪在最早是因为军事目的而得以开发,近年来迅速向民用工业领域扩展。自二十世纪70年代,欧美一些发达国家先后开始使用热像仪在各个领域进行探索。 热像仪也经过几十年的发展,已经发展成非常轻便的现场测试设备。由于测试往往产生的温度场差异不大和现场环境复杂等因素,好的热像仪必须具备160*120像素、分辨率小于0.1℃、空间分辨率小、具备红外图像和可见光图像合成功能等。 热像仪是利用红外探测器和光学成像物镜接受被测目标的红外辐射能量分布图形反映到红外探测器的光敏元件上,从而获得红外热像图,这种热像图与物体表面的热分布场相对应。通俗地讲热像仪就是将物体发出的不可见红外能量转变为可见的热图像。热图像的上面的不同颜色代表被测物体的不同温度。 二.热像仪的品牌 作为世界最先进的高科技产品,热像仪的知名品牌主要集中在美国。近年来,我国在热像仪领域也取得了巨大进步,但是在技术上相对美国还有一定差距,相信国内品牌再经过几年的发展,一定能够和美国品牌抗衡。 热像仪的品牌非常多,客户在选择时,有点无从下手,在选择热像仪时,建议选择大品牌的热像仪。 2012年4月,美国知名的Thermal infrared imager TIMES,发布了2011年全球热像仪品牌排名,美国RNO连续5年荣登销量榜首,其PC160G热像仪更是以40%的市场份额连续8年荣登单品销量冠军。在选择时,可以根据这个排名,进行参考选择。同时选择适合自己的型号。 1. 美国RNO RNO公司于1940年成立于美国芝加哥,是全球历史最为悠久的热像仪生产企业,在二战中,RNO热像仪曾广泛应用美国军方。经过70年的发展,RNO下设了美国RNO热像仪公司,美俄合资RNO夜视仪公司。RNO是全球最为专业的热像仪公司,其下属的RNO夜视仪,在3,4代高端夜视仪领域拥有极大的知名度。
光谱仪的发展历史与现状
光谱仪的发展历史与现状 【摘要】光谱分析方法作为一种重要的分析手段,在科研、生产、质量控制等方面发挥了重要作用。本文主要从光谱仪原理、光谱仪基本特性、发展历程、重要发明(UVS、AAS)以及未来展望等几个方面进行简要的阐述。 【关键词】光谱仪原理、基本特性、发展历程、UVS、AAS 1.光谱仪基本原理 光谱仪器是进行光谱研究和物质结构分析,利用光学色散原理及现代先进电子技术设计的光电仪器。它的基本作用是测量被研究光(所研究物质反射、吸收、散射或受激发的荧光等)的光谱特性,包括波长、强度等谱线特征[1]。因此,光谱仪器应具有以下功能: (1)分光:把被研究光按一定波长或波数的发布规律在一定空间分开。(2)感光:将光信号转换成易于测量的电信号,相应测量出各波长光的强度,得到光能量按波长的发布规律。 (3)绘谱线图:把分开的光波及其强度按波长或波数的发布规律记录保存或显示对应光谱图。 要具备上述功能,一般光谱仪器都可分成四部分组成:光源和照明系统,分光系统,探测接收系统和传输存储显示系统。 根据光谱仪器的工作原理可以分成两大类:一类是基于空间色散和干涉分光的经典光谱仪;另一类是基于调制原理分光的新型光谱仪。
经典光谱仪结构图 光源和照明系统可以是研究的对象,也可以作为研究的工具照射被研究的物质。一般来说,在研究物质的发射光谱如气体火焰、交直流电弧以及电火花等激发试样时,光源就是研究的对象;而在研究吸收光谱、拉曼光谱或荧光光谱时,光源则作为照明工具(如汞灯、红外干燥灯、乌灯、氙灯、LED、激光器等等)。为了尽可能多地会聚光源照射的光强度,并传递给后面的分光系统,就需要专门设计照明系统[2]。 分光系统是任何光谱仪的核心部分,它一般是由准直系统、色散系统、成像系统三部分组成,主要作用是将照射来的光在一定空间按照一定波长规律分开。如图2-1所示,准直系统一般由入射狭缝和准直物镜组成,入射狭缝位于准直物镜的焦平面上。光源和照明系统发出的光通过狭缝照射到准直物镜,变成平行光束投射到色散系统上。色散系统的作用是将入射的单束复合光分解为多束单色光。多束单色光经过成像物镜按照波长的顺序成像在透镜焦平面上;这样,单束的复合光经过分光系统后成功变成了多束单色光的像。目前主要的色散系统主要有物质色散(如棱镜)、多缝衍射(如光栅)和多光束干涉(如干涉仪)探测接收系统的作用是将成像系统焦平面上接收的光谱能量转换成易于测量的电信号,并测量出对应光谱组成部分的波长和强度,从而获得被研究物质的特性参数如物质的组成成分及其含量以及物质的温度、星体的运动速度等等。目前光谱仪器的接收系统可以分为目视系统、摄谱系统和光电系统。经典光谱仪器根据设计需要可以选择其中一种,但干涉调制光谱仪器只能采用光电接收系统。 传输存储显示系统是将探测接收系统测量出来的电信号经过初步处理后存储或通过高速传输接口上传给上位机,在上位机上对光谱数据进行进一步数据处理及显示等。 2.光谱仪基本特性 光谱仪器的基本特性主要包括:工作光谱围、色散率、分辨率、光强度以及工作效率等五个方面。 (1)工作光谱围 指使用光谱仪器所能记录的光谱围。它主要决定于仪器中光学零件的光谱透
大视场凝视型红外共形光学系统设计_姜洋
第41卷第6期红外与激光工程2012年6月Vol.41No.6Infrared and Laser Engineering Jun.2012 大视场凝视型红外共形光学系统设计 姜洋1,2,孙强1,孙金霞3,刘英1,李淳1,王健1,杨乐1,2 (1.中国科学院长春光学精密机械与物理研究所,吉林长春130033; 2.中国科学院研究生院,北京100049; 3.中国空空导弹研究院,河南洛阳471009) 摘要:为提高导弹整流罩气动性能,增强导引头系统稳定性,增大观察视场,完成了共形整流罩结合红外鱼眼镜头的新型红外凝视成像导引头光学系统设计。光学系统采用的椭球形共形整流罩将反远距结构与f-θ成像相结合,通过控制像方视场角提高像面照度的均匀性。对不同结构共形系统的像差特性进行了分析。光学系统解决了大视场光阑像差问题,最终获得±90°的无渐晕观察视场,其冷光阑效率为100%,全视场MTF在15lp/mm处均大于0.5,点斑均方根半径小于30μm,在半径为50μm 圆内能量集中度为93%以上,像面相对照度高于85%,满足大视场光学系统的成像要求。 关键词:光学系统设计;共形光学;红外成像制导;鱼眼镜头 中图分类号:TN216文献标志码:A文章编号:1007-2276(2012)06-1575-06 Design of infrared staring conformal optical system with wide field of view Jiang Yang1,2,Sun Qiang1,Sun Jinxia3,Liu Ying1,Li Chun1,Wang Jian1,Yang Le1,2 (1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun130033,China; 2.Graduate University of Chinese Academy of Sciences,Beijing100049,China; 3.China Airborne Missile Academy,Luoyang471009,China) Abstract:In order to optimize the aerodynamic performance of missile domes,enhance the stability and enlarge the FOV,an infrared staring imaging seeker combining the conformal dome and infrared fisheye lens was designed.The solution used an ellipsoidal conformal dome,inverted telephoto lens and f-θlens.Uniform illumination was realized through managing the imaging angle and pupil aberrations.Aberration characteristics of conformal dome were analyzed.The pupil aberrations at large FOV were solved.An optical system with±90°unvignetted FOR,100%cold stop efficient was designed.The MTF is higher than0.5at the spatial frequency of15lp/mm across the entire field.The RMS radiuses of spot diagram are less than 30μm;the geometric encircled energy is above93%in50μm range;the relative illumination is above85% at margin FOV.The specifications can meet the requirements of the wide field systems. Key words:optical system design;conformal optics;infrared imaging guidance;fisheye lens 收稿日期:2011-10-05;修订日期:2011-12-03 基金项目:国家自然科学基金(60977001);国家863计划(2007AA122110) 作者简介:姜洋(1984-),男,博士生,主要从事光学系统设计等方面的研究。Email:le_zhi@https://www.360docs.net/doc/1716075028.html, 导师简介:孙强(1971-),男,研究员,博士生导师,博士,主要从事现代红外光学仪器、二元光学、红外系统仿真等方面的研究。 Email:sunq@https://www.360docs.net/doc/1716075028.html,
基于模型辨识的自适应光学系统控制技术研究
基于模型辨识的自适应光学系统控制技术研究自适应光学技术能够实时补偿光在传输过程中由传输介质引起的随机波前畸变,进而被广泛应用天文观测、空间目标观测和激光传输等系统。近年来,随着相关理论和技术的不断发展,自适应光学技术在光通信、医学成像、激光加工等众多领域取得了进一步的应用。波前控制作为自适应光学系统的关键技术之一,直接影响自适应光学系统的波前校正性能。目前,大多数自适应光学系统采用的算法是简单且易于实现的比例积分控制,但是其控制参数调节多依赖人为经验,且控制性能和稳定性难以兼顾。虽然有很多自适应光学控制的算法被提出,如鲁棒控制、预测控制、最优控制等,但大多数局限于理论仿真和实验室研究,离实际应用还存在一定距离,少部分算法实际应用又具有局限性。目前,随着自适应光学应用领域的拓展和对控制性能要求的不断提高,控制算法难以满足实际需求。因此,为了解决自适应光学系统的控制难题,本文提出采用线性二次高斯控制方法。首先,针对线性二次高斯控制需要精度较高的被控对象系统模型问题,本文根据自适应光学系统实际工作情况,提出了基于变量带误差模型的子空间辨识方法。利用自适应光学系统的输入与输出数据,建立了自适应光学系统的状态空间模型。仿真结果表明了所建立的自适应光学系统的状态空间模型准确度高,具有较强的噪声抑制能力和鲁棒性。且该方法还可为其它模型类控制算法提供一种模型基础。其次,本文以自适应光学系统的状态空间辨识模型为基础,采用采用基于状态调节的线性二次高斯控制技术。以最小化残余波前作为线性二次型性能指标,
通过最小化二次型性能指标,确定反馈控制规律的增益。根据入射波前的泽尼克多项式扩展形式和变形镜以及波前传感器的线性关系来定义自适应光学系统的状态向量。而针对自适应光学系统的初始状态未知问题,本文利用卡尔曼滤波器和卡尔曼滤波状态对自适应光学系统的状态向量作线性估计。通过求解状态估计和卡尔曼滤波器增益,以及最小化求解二次型性能指标得到的状态调节增益,可以实现自适应光学系统的线性二次高斯闭环控制。数值仿真验证了线性二次高斯控制的可行性和波前校正能力。然后,通过静态波前和动态波前校正实验来验证了线性二次高斯控制的波前校正能力,实验结果与数值仿真结果保持一致,证明了线性二次高斯控制的可行性与有效性。实验结果表明了线性二次高斯控制校正后的各项性能指标都要优于比例积分控制。而且在自适应光学系统的响应速度、光斑抖动的抑制以及系统的稳定性与鲁棒性等方面,线性二次高斯控制表现较为出色。最后,本文通过实验研究了系统噪声和高斯白噪声对自适应光学系统线性二次高斯控制波前像差校正效果的影响。实验结果表明了采用系统近似噪声作为测量噪声的线性二次高斯控制其波前校正效果提升明显。这也从另一方面表明了系统噪声对线性二次高斯控制影响显著,若能准确获取自适应光学系统的噪声统计模型,将有望进一步提高线性二次高斯控制在自适应光学系统的波前像差校正能力。
浅析智能光学发展现状
龙源期刊网 https://www.360docs.net/doc/1716075028.html, 浅析智能光学发展现状 作者:梁宇宏 来源:《科技资讯》2017年第31期 摘要:现代光学研究有朝着宏观/微观双向发展的趋势,随着光学技术应用领域的不断扩展,传统的,以“静态系统”为主的光学技术已难以适应科学研究的新需求。由此智能光学应运而生,其是基于传统光学技术提供的一个全新概念,其技术基础主要依赖于自适应光学和主动光学技术。本文从智能光学的概念出发,对智能光学技术(智能光学系统、动态光学调制技术、动态光学探测技术等)进行评述。同时,基于智能光学技术的特点,对智能光学发展现状进行探究。 关键词:智能光学自适应及主动光学动态光学调制动态光学探测及发展现状 中图分类号:O43 文献标识码:A 文章编号:1672-3791(2017)11(a)-0228-02 智能光学(Smart Optics or Intelligent Optics),是传统光学与现代计算机系统相结合的产物。智能光学集新材料、计算机信息、电子、紧密加工等现代技术于一体,极大地扩展了传统光学系统应用领域。智能光学以自适应光学和主动光学技术为基础,与微电子学、信息光学、光电子学等学科领域有着紧密的联系——智能光学与相关学科相互促进、共同发展。 1 智能光学的概念 国外科学家(Greenaway)将智能光学定义为能够实现动态调整的光学技术和组件。智能光学是一项不断发展的概念,其最初是建立在自适应光学和主动光学上的一项技术——以反射光学组件为主要设备进行波前相位的动态调制。这里将对自适应光学和主动光学进行简单介绍。 1.1 自适应光学 在介绍自适应光学技术前,先对“大气湍流”的概念进行简单介绍。大气湍流实质上是大气中的一种运动形式,由于大气湍流的存在,大气中的水气、热量、动量以及污染物的水平和垂直交换作用得到了极大地增强,而这种运动强度增大趋势远大于分子运动强度的程度。我们知道,大气属于光波的传输媒介之一,光波在大气当中传播时,由于受到大气湍流的影响,进而产生波前畸变(波前在经过传输介质传输后发生了变化)。自适应光学技术应用旨在补偿因大气湍流或其他因素导致的波前畸变。当前,自适应光学主要在智能光学中起到利用变形镜实现高速、小幅波前调制的重要作用。 1.2 主动光学
红外热成像基本原理概论
红外热成像仪基本原理与发展前景概论 光电1201 王知权 120150111 前言 红外热像仪是利用红外探测器、光学成像物镜和光机扫描系统(目前先进的焦平面技术则省去了光机扫描系统)接受被测目标的红外辐射能量分布图形反映到红外探测器的光敏元上,在光学系统和红外探测器之间,有一个光机扫描机构(焦平面热像仪无此机构)对被测物体的红外热像进行扫描,并聚焦在单元或分光探测器上,由探测器将红外辐射能转换成电信号,经放大处理、转换或标准视频信号通过电视屏或监测器显示红外热像图。 原理 红外线是一种电磁波,具有与无线电波和可见光一样的本质。红外线的发现是人类对自然认识的一次飞跃。利用某种特殊的电子装置将物体表面的温度分布转换成人眼可见的图像,并以不同颜色显示物体表面温度分布的技术称之为红外热成像技术,这种电子装置称为红外热像仪。 这种热像图与物体表面的热分布场相对应;实质上是被测目标物体各部分红外辐射的热像分布图由于信号非常弱,与可见光图像相比,缺少层次和立体感,因此,在实际动作过程中为更有效地判断被测目标的红外热分布场,常采用一些辅助措施来增加仪器的实用功能,如图像亮度、对比度的控制,实标校正,伪色彩描绘等高线和直方进行数学运算、打印等。 红外成像系统简介 红外技术是一门研究红外辐射的产生、传播、转化、测量及其应用的技术科学。任何物体的红外辐射包括介于可见光与微波之间的电磁波段。通常人们又把红外辐射称为红外光、红外线。实际上其波段是指其波长约在0.75μm到1000μm 的电磁波。通常人们将其划分为近、中、远红外三部分。近红外指波长为 0.75-3.0μm;中红外指波长为3.0-20μm;远红外则指波长为20-1000μm。由于大气对红外辐射的吸收,只留下三个重要的“窗口”区,即1-3μm、3-5μm 和8-13μm可让红外辐射通过。 红外探测器是红外技术的核心,它是利用红外辐射与物质相互作用所呈现出来的物理效应来探测红外辐射的传感器,多数情况下是利用这种相互最用所呈现出的电学效应。红外探测器主要分为光子探测器和热敏感探测器两大类型。其中,光子探测器按原理啊可分为光电导探测器、光伏探测器、光电磁探测器和量子阱探测器。 光子探测器的材料有PbS,PbSe,InSb,HgCdTe(MCT),GaAs/InGaAs等,其中HgCdTe和InSb斗需要在低温下才能工作。光子探测器按其工作温度又可分为制
机器视觉技术发展现状文献地的综述
机器视觉技术发展现状文献地的综述 一、机器视觉简介机器视觉就是用机器代替人眼来做测量和 判断。机器视觉主要利用计算机来模拟人的视觉功能,再现于人类视觉有关的某些智能行为,从客观事物的图像中提取信息进行处理,并加以理解,最终用于实际检测和控制。机器视觉是一项综合技术,其包括数字处理、机械工程技术、控制、光源照明技术、光学成像、传感器技术、模拟与数字视频技术、计算机软硬件技术和人机接口技术等,这些技术相互协调才能构成一个完整的工业机器视觉系统[[]郭静,罗华,张涛、机器视觉与应用[J]、电子科技,全文结束》》,27(7): 185-188] o机器视觉强调实用性,要能适应工业现场恶劣的环境,并要有合理的性价比、通用的通讯接口、较高的容错能力和安全性、较强的通用性和可移植性。其更强调的是实时性,要求高速度和高精度,且具有非接触性、实时性、自动化和智能高等优点,有着广泛的应用前景[l]o一个典型的工业机器人视觉应用系统包括光源、光学成像系统、图像捕捉系统、图像采集与数字化模块、智能图像处理与决策模块以及控制执行模块。通过CCD或CMOS摄像机将被测目标转换为图像信号,然后通过A/D 转换成数字信号传送给专用的图像处理系统,并根据像素分布、亮度和颜色等信息,将其转换成数字化信息。图像系统对这些信号进行各种运算来抽取目标的特
征,如面积、数量、位置和长度等,进而根据判别的结果来控制现场的设备动作[1]。机器视觉一般都包括下面四个过程: 二、机器视觉的发展历史机器视觉是在20世纪50年代从统计模式识别开始,当时的工作主要集中在二维图像分析、识别和理解上。从20世纪70年代才真正开始发展,并涌现出了主动视觉理论框架、基于感知特征群岛物体识别理论框架等新的概念、方法及理论。Marr视觉计算机理论是视觉研究迄今较为完善的理论,其使视觉研究有了一个较为明确的体系[[]曹国斌,刘雪娇,王华.图像和机器视觉技术概述[J]、电子工业专用设备,全文结束》》(8):27-31?]o Marr视觉理论从计算视觉理论出发,将立体视觉分为自上而下的三个阶段,即早期的二维视觉数据获取、中期的要素处理和后期三维信息的形成和表达。经历这单个阶段即可完成二维到三维的转换工作、图2 Marr理论框架的三个阶段早期阶段的“要素图” (primarysketch)是由二维图像中的点、直线、曲线和纹理等特征组成,早期阶段的处理是从图像中获取这些特征。中期阶段的处理是处理特征要素的位置和相互关系,从而完成对物体的识别、运动分析和形状恢复等操作,该阶段处理的结果仅仅是对空间场景的二维半描述。如若要完成对空间场景的真正三维描述,还需第三阶段的后期视觉处理,将物体自身坐标统一到一个世界坐标系中[3]。作为立体视觉的基础理论,Marr理论具有极其重要的指导作用,但肋仃理论自身有缺陷,如单向性(视觉处理只能从前至后处理)、被动性(视觉处理只能是给什么图像处理
典型光学仪器的基本原理
1、光学仪器在国民生产和生活中各个领域广泛应用,绝大多数光学仪器可归纳为望远镜系统、显微镜系统和照明系统三类。 2、人眼构造:人眼本身就相当于一个摄影系统,外表大体呈球形,直径约为25mm,由角膜、瞳孔、房水、睫状体、晶状体和玻璃体等组成的屈光系统相当于成像系统的镜头,起聚焦成像作用。眼睛内的视网膜和大脑的使神经中枢等相当于成像系统的感光底片和控制系统,能够接收外界信号并成像。 3、视度调节:眼睛通过睫状肌的伸缩本能地改变水晶体光焦度的大小以实现对任意距离的物体自动调焦的过程称作眼睛的视度调节。 4、视觉调节:人眼除了随着物体距离的改变而调节晶状体曲率外,还可以在不同的明暗条件下工作,人眼能感受非常大范围的光亮度变化,即眼睛对不同的亮度条件下具有适应的调节能力,这种能力称为眼睛的视觉调节。 5、放大镜定义:放大镜(英文名称:magnifier):用来观察物体细节的简单目视光学器件,是焦距比眼的明视距离小得多的会聚透镜。物体在人眼视网膜上所成像的大小正比于物对眼所张的角(视角)。 6、视角愈大,像也愈大,愈能分辨物的细节。移近物体可增大视角,但受到眼睛调焦能力的限制。使用放大镜,令其紧靠眼睛,并把物放在它的焦点以内,成一正立虚像。放大镜的作用是放大视角。 7、显微镜:显微镜是由一个透镜或几个透镜的组合构成的一种光学仪器,是人类进入原子时代的标志。主要用于放大微小物体成为人的肉眼所能看到的仪器。显微镜分光学显微镜和电子显微镜:光学显微
镜是在1590年由荷兰的詹森父子所首创。现在的光学显微镜可把物体放大1600倍,分辨的最小极限达0.1微米,国内显微镜机械筒长度一般是160mm。 8、光学显微镜由目镜,物镜,粗准焦螺旋,细准焦螺旋,压片夹,通光孔,遮光器,转换器,反光镜,载物台,镜臂,镜筒,镜座,聚光器,光阑组成。 9、显微镜以显微原理进行分类可分为光学显微镜与电子显微镜。 10、光学显微镜:通常皆由光学部分、照明部分和机械部分组成。无
大视场离轴三反光学系统设计
14红外2017年8月文章编号:1672-8785(2017)08-0014-05 大视场离轴三反光学系统设计 罗秦以3张冬冬1钮新华^ (1.中国科学院上海技术物理研究所,h海200083 ; 2.中国科学院红外探测与成像技术重点实验室,上海200Q83; 3.中国科学院大学,北京100〇49) 摘要:针对地球环境j s感的大视场和宽光谱的应用需求,在同轴三反学系统的基 础上,通过视场离轴实现了无中心遮拦,并设计了一种焦距为12〇m m、F数为3.5、工 作波长为〇,4?I.65啤、像元尺寸为7.5 n m以及采用C o o k三片式结构的光学系统。在 没有使用自由曲面的情况下,实现了 30°x4°的大视场.其中,主镜为六次双曲面,次 镜为二次扁椭圆面,三镜为四次扁椭圆面。在全视场范围内,该系统在奈奎斯特频率 处的调制传递菡数(Modulation Transfer Rm etion,M T I?)大于0,6,接近翁_射极限。:其藝 散斑崖径的均方根值小于探_器的像元尺寸,畸变小于2.5%,说明本文系统具有优良 的成像性能》 关键词:光学设计;大视场;离轴三反光学系统 中图分类号:TH703 文献标志码:A DOI:10.3969/j.issn.l672-8785.2017.08.003 Optical Design of OfF-axis Three-mirror System with Wide Field LUO Qin ZHANG Dong-dong x,NIU Xin-hua 1 (1. Shanghai Institute of Technical Physicsf Chinese Academy of Sciences, Shanghai 200083, China; 2. Key Laboratory of Infrared System Detection and Imaging Technology, Chinese Academy of Sciences, Shanghai 200083, China; 3. University of Chinese Academy of Sciences, Beijing 100049, China) Abstract: To meet the application needs of wide field and wide spectrum of earth environment remote sensing, a center without obstructing is realized by means of field off-axis on the basis of coaxial three- mirror optical systems. An optical system with a Cook three-mirror structure is designed. The optical system has its focal length of 120 mm, F number of 3.5, operating wavelength of 0.4 to 1.65 \xm and pixel size of 7.5 |j.m. it realizes the 30° x 4° large field of view without any free-form surfaces. In the optical system, the primary mirror is a 6 times hyperboloid; the second mirror is a secondary flat ellipse and the third mirror is a 4 times flat ellipse. The system has its Modulation Transfer Function (MTF) greater than 0.6 at the Nyquist freaquency in the whole field of view, which is close to the diffraction limit. Its RMS dispersion spot diameter is less than the pixel size of the detector and its distortion is less than 2.5%. These results show that the system has excellent imaging performance. Key words: optical design; wide field; ofF-axis three-mirror system 收稿日期:2017-03-19 作者简介:罗秦(1992-),男,江西抚州人,硕士研究生,主要从事光学系统设计方面的研究。 E-mail: luoqin888@https://www.360docs.net/doc/1716075028.html, I nfrared(monthly)/V ol.38, No.8, A ug 2017https://www.360docs.net/doc/1716075028.html,/hw