自动控制原理 第十六讲 控制器的结构
Lecture16-Controller Structures
K.J.?str?m
1.Introduction
2.Feedback and Feedforward
3.Linear Schemes
4.Nonlinear Schemes
5.Gain Scheduling and Adaptation
6.Summary
Theme:Building complex control systems.
Bottom Up Design
?A way to view systems
?A number of building blocks
?Ideas to combine them
?What are the building blocks of control?
?What principles can be used to select and combine them??The danger:Can it be done better??Commissioning:Close loops one by one.
Top Down Design of Control Systems
?Model complete system
?Design an integrated system
?System concepts
–State feedback
–Observers
–Model predictive control
?Commissioning:Needs careful consideration.
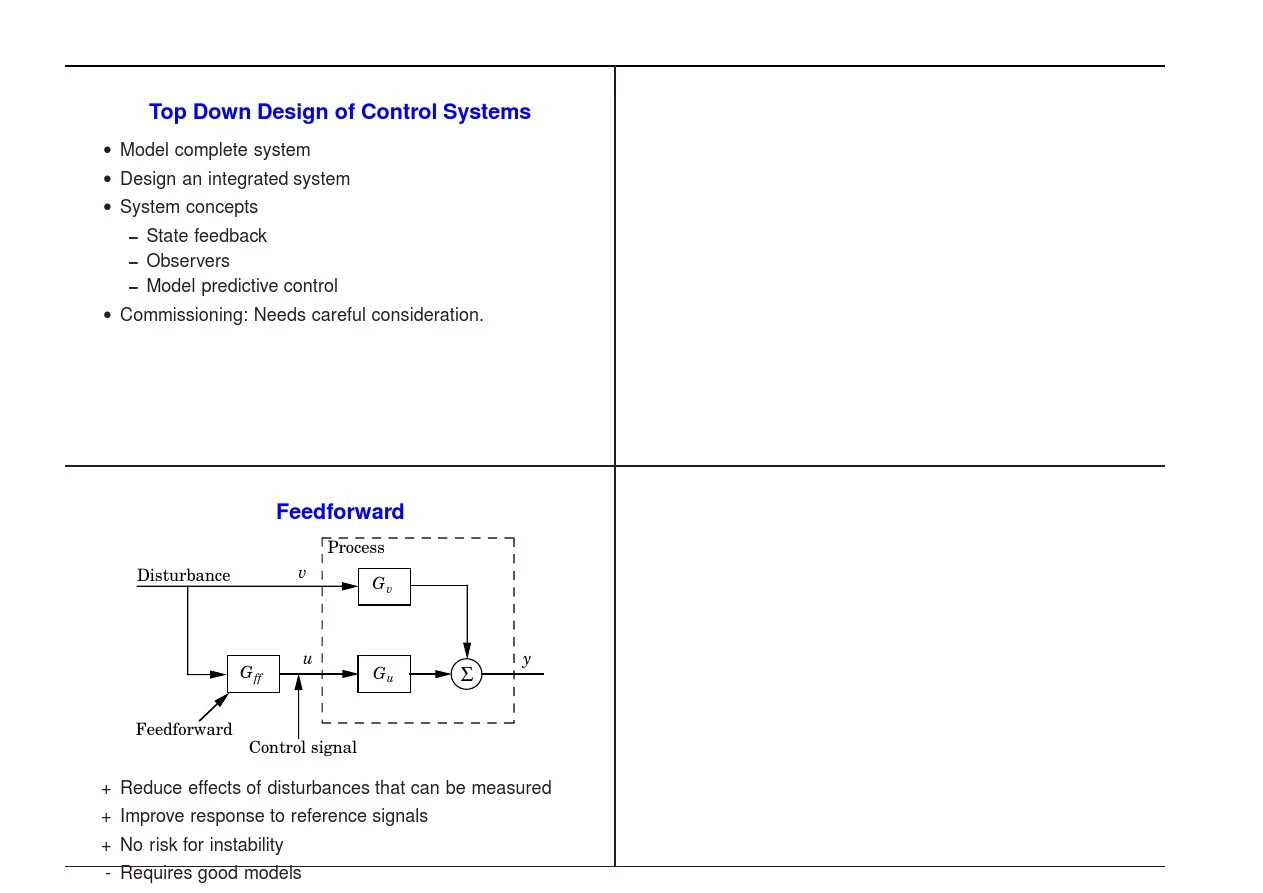
Feedforward
+Reduce effects of disturbances that can be measured +Improve response to reference signals
+No risk for instability
-Requires good models
Combination of Feedback and Feedforward
Model Following-2DOF
Filters
T ypical?lters
?Low pass
?High pass
?Band pass
?Notch
?Body bending?lters
T ypical applications
?Reduce disturbances
?Improve robustness(high frequency roll-off)
?Smooth reference signals
When is Cascade Control Useful?
Key idea:make tight feedback around essential places where there are essential perturbations(disturbances or uncertain-ties)
Guidelines:
?Well de?ned relation between primary and secondary
variables
?Essential disturbances and process variations in inner loop ?Inner loop faster
?Tight feedback(high gain and high bandwidth)in inner
loop
Attenuation of Disturbances with Speci?c
Character
Idea:Exploit model of distur-
bances(internal model principle)
?Constant disturbances(Inte-
gral Action)
?Sinusoidal disturbances
?Periodic disturbances
A disturbance observer is an alternative.
k i
t
e(s)ds?k d
d y f
k i
t
e(s)ds?k p
t
t?L
u(s)ds
A simple form of the Smith predictor
Model Predictive Control
?Beautifully simple
?Are there some snags?
–Cancellations may degrade performance
–Does not work if process is unstable
–Less general than state feedback
?Widely used in process industries
c K.J.?str?m August,20015
State Feedback and Observers
?Use model to estimate variables that are not directly measurable
?States are the variables required to account for
storage of
mass,momentum and energy ?Estimate the state
?Feedback from full state deviation ?Feedforward to generate u m and y m
Limiters
Limiters are often used
?T o avoid saturation
?An element in circuits for windup protection ?T o protect equipment to rapid changes
A simple amplitude limiter
Jump and Rate
Limiter
1
2
3
4
?10
1
vlim=2, alim=0.5Commonly used in the power industry for load changes to save boilers.
Ratio Control
Arrangement to obtain two ?ows that are proportional to each other,e.g.oil and air in boilers
y A The scheme B is preferable!Why?
Control of Fuel and Air in a Boiler
An elegant solution
Oil Power
Air
Fuzzy Control
?A nonlinear state feedback
–How do we get the states?
–What does the nonlinearity look like?
–Rules and interpolation
–Why so few rules
–When is it useful
?Excellent to automate successful manual operations ?Intuitive
?A lot of controversy:The No Model Myth
?Fuzzy control is more useful than its detractors claim but less useful than the propagandists claim
?Neuro-fuzzy
Gain Scheduling
Example of scheduling variables
?Production rate
?Machine speed
?Mach number and dynamic pressure
?Room occupancy
Adaptation
?Certainty Equivalence
?Many control and estimation schemes
?Dual control
–Control should be directing as well as investigating!
自动控制原理第一章习题解答
自编自控教材习题解答 第一章 1-2 图1-17 是液位自动控制系统原理示意图。图中SM为执行电动机。试分析系统的工作原理,指出该系统参考输入、干扰量、被控对象、被控量、控制器,并画出系统的方框图。 图1-17 习题1-2 液位自动控制系统 【解】 系统参考输入:预期液位;被控对象:水箱;被控量:水箱液位;控制器:电动机减速器和控制阀门;干扰量:用水流量Q2。系统的方块图如下 注意:控制系统的工作过程是在原物理系统中提炼出的控制流程,与原系统的物理组成不是完全对应的。有部分同学认为控制阀门是被控对象,只有阀门开度变化才有液位的变化。实际上它应该是执行机构,操纵它来改变被控对象的被控制量。 1-3在过去,控制系统常常以人作为闭环控制系统的一部分,图1-18是人在回路中的水位控制示意图,试画出该控制系统的方框图。 图1-18 习题1-3 阀门控制系统 【解】 略
1-4图1-19是仓库大门自动控制系统原理图。试说明系统自动控制大门开闭的工作原理,并画出系统的方块图。 图1-19 习题1-4 仓库大门自动系统 【解】 系统参考输入:给定门状态;被控对象:门;被控量: 门位置;控制器:放大器、伺服点击绞盘;系统的方块图如下 1-5 图1-20为水温控制系统示意图。冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。冷水流量变化用流量计测量。试绘制系统方块图,并说明为了保持热水温度为期望值,系统是如何工作的?指出该系统的参考输入、干扰量、被控对象和控制装置各是什么? 图1-20 习题1-5 水温控制系统示意图 【解】 该系统的参考输入:给定温度;干扰量:冷水流量的变化;被控对象:热交换器;被控量:交换器的水温;控制装置:温度控制器,此时控制器的输出不仅与实际水温有关而且和冷水的流量有关,所以该系统不仅是反馈控制而是反馈+前馈的复合控制方式。它 的主要目的是一旦冷水流量增大或减少时,及时调整蒸汽流量,不用等到水温降低或升高 实际 给定
自动控制原理 胡寿松 第二版 课后答案 第一章_参考答案
控制系统导论习题及参考答案 自动控制原理胡寿松第二版课后答案 1-2下图是仓库大门自动控制系统原理示意图,试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。 解当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。系统方框图如下图所示。 1-3根据图示的电动机速度控制系统 工作原理图,完成: (1) 将a,b与c,d用线连接成负 反馈状态; (2) 画出系统方框图。
解:(1)负反馈连接方式为:d b?; a?,c (2)系统方框图如图所示。 1-3 图(a),(b)所示的系统均为电压调节系统。假设空载时两系统发电机端电压均为110V,试问带上负载后,图(a),(b)中哪个能保持110V不变,哪个电压会低于110V?为什么? 解:带上负载后,开始由于负载的影响,图(a)与(b)系统的端电压都要下降,但图(a)中所示系统能恢复到110伏而图(b)系统却不能。理由如下: 图(a)系统,当u低于给定电压时,其偏差电压经放大器K放大后,驱动电机D转动,经减速器带动电刷,使发电机F的激磁电流 I增大,发电机的输出电压会升高,从而 j 使偏差电压减小,直至偏差电压为零时,电机才停止转动。因此,图(a)系统能保持110伏不变。 图(b)系统,当u低于给定电压时,其偏差电压经放大器K后,直接使发电机激磁电流增大,提高发电机的端电压,使发电机G 的端电压回升,偏差电压减小,但不可能等于零,因为当偏差电压为0时, i=0,发电机就不能工作。即图(b)所示系统的稳 f 态电压会低于110伏。
自动控制原理第五版课后答案完整版-2
第 一 章 1-1 图1-2是液位自动控制系统原理示意图。在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。 图1-2 液位自动控制系统 解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液 位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度 不变。 工作原理:当电位电刷位于中点(对应 r u )时,电动机静止不动,控制阀门有一定的 开度,流入水量与流出水量相等,从而使液面保持给定高度 r c ,一旦流入水量或流出水量 发生变化时,液面高度就会偏离给定高度r c 。 当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c 。 反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c 。 系统方块图如图所示: 1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统? (1) 222 ) ()(5)(dt t r d t t r t c ++=;
(2))()(8) (6)(3)(2 233t r t c dt t dc dt t c d dt t c d =+++; (3) dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω; (5)?∞-++=t d r dt t dr t r t c τ τ)(5) (6)(3)(; (6))()(2 t r t c =; (7)???? ?≥<=.6),(6,0)(t t r t t c 解:(1)因为c(t)的表达式中包含变量的二次项2 ()r t ,所以该系统为非线性系统。 (2)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该 系统为线性定常系统。 (3)该微分方程不含变量及其导数的高次幂或乘积项,所以该系统为线性系统,但第一项 () dc t t dt 的系数为t ,是随时间变化的变量,因此该系统为线性时变系统。 (4)因为c(t)的表达式中r(t)的系数为非线性函数cos t ω,所以该系统为非线性系统。 (5)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。 (6)因为c(t)的表达式中包含变量的二次项2()r t ,表示二次曲线关系,所以该系统为非 线性系统。 (7)因为c(t)的表达式可写为()()c t a r t =?,其中 0(6) 1(6)t a t ?
自动控制原理第五版课后答案解析[完整版]
WORD 资料可编辑 第一章 1-1 图 1-2 是液位自动控制系统原理示意图。在任意情况下,希望液面高度 c 维持不变,试说明系统工作原理并画出系统方块图。 图 1-2液位自动控制系统 解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位u r(表征液 位的希望值c r);比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高 度不变。 工作原理:当电位电刷位于中点(对应u r)时,电动机静止不动,控制阀门有一定的 开度,流入水量与流出水量相等,从而使液面保持给定高度c r,一旦流入水量或流出水量 发生变化时,液面高度就会偏离给定高度c r。 当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转 动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中 点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度c r。 反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面 升高到给定高度c r。 系统方块图如图所示: 1-10下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统? c(t)5r 2(t) t d2r (t) 2
WORD 资料可编辑 (2) (3) (4) (5) (6) (7) d 3c(t ) 3 d 2 c(t) 6 dc(t) 8c(t ) r (t ) dt 3 dt 2 dt ; t dc(t ) c(t ) r (t) 3 dr (t ) dt dt ; c(t) r (t ) cos t 5 ; r ( )d c(t) 3r (t) 6 dr (t ) 5 t dt ; c(t) r 2 (t) ; c(t) 0, t 6 r (t), t 6. 解:( 1)因为 c(t) 的表达式中包含变量的二次项 r 2 (t ) ,所以该系统为非线性系统。 ( 2)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。 ( 3)该微分方程不含变量及其导数的高次幂或乘积项,所以该系统为线性系统,但第一项 t dc(t ) dt 的系数为 t ,是随时间变化的变量,因此该系统为线性时变系统。 (4)因为 c(t) 的表达式中 r(t) 的系数为非线性函数 cos t ,所以该系统为非线性系统。 ( 5)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。 (6)因为 c(t) 的表达式中包含变量的二次项 r 2 (t ) ,表示二次曲线关系,所以该系统为非 线性系统。 0 (t 6) a (7)因为 c(t) 的表达式可写为 c(t ) a r (t) ,其中 1 (t 6) ,所以该系统可看作是 线性时变系统。
自动控制原理答案——第一章
第1章 习 题 1-1 日常生活中存在许多控制系统,其中洗衣机的控制是属于开环控制还是闭环控制?卫生间抽水马桶水箱蓄水量的控制是开环控制还是闭环控制? 解:洗衣机的洗衣过程属于开环控制,抽水马桶的蓄水控制属于闭环控制。 1-2 用方块图表示驾驶员沿给定路线行驶时观察道路正确驾驶的反馈过程。 解:驾驶过程方块图如图 所示。 图 驾驶过程方块图 1-3自动热水器系统的工作原理如图T1.1所示。水箱中的水位有冷水入口调节阀保证,温度由加热器维持。试分析水位和温度控制系统的工作原理,并以热水出口流量的变化为扰动,画出温度控制系统的原理方块图。 图T1.1 习题1-3图 解:水位控制:输入量为预定的希望水位,设为H r, 被控量为水箱实际水位,设为H。当H=H r时,浮子保持一定位置,冷水调节阀保持一定开度,进水量=出水量,水位保持在希望水位上。当出水量增加时,实际水位下降,浮子下沉,冷水入口调节阀开大,进水量增加,水位上升直到H=H r。同理,当出水量减少时,实际水位上升,浮子上升,冷水入口调节阀关小,进水量减少,水位下降直到H=H r。 温度控制:在热水电加热器系统中,输入量为预定的希望温度(给定值),设为T r,被控量(输出量)为水箱实际水温,设为,控制对象为水箱。扰动信号主要是由于放出热水并注入冷水而产生的降温作用。当T=T r时,温控开关断开,电加热器不工作,此时水箱中水温保持在希望水温上。当使用热水时,由于扰动作用使实际水温下降,测温元件感受T 第一章 绪论 1-1 试比较开环控制系统和闭环控制系统的优缺点. 解答:1开环系统 (1) 优点:结构简单,成本低,工作稳定。用于系统输入信号及扰动作用能预先知道时,可得到满意的效果。 (2) 缺点:不能自动调节被控量的偏差。因此系统元器件参数变化,外来未知扰动存在时,控制精度差。 2 闭环系统 ⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量 偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。它是一种按偏差调节的控制系统。在实际中应用广泛。 ⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。 1-2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说 明之。 解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。 闭环控制系统常采用负反馈。由1-1中的描述的闭环系统的优点所证明。例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉子的温度,再与温度值相比较,去控制加热系统,以达到设定值。 1-3 试判断下列微分方程所描述的系统属于何种类型(线性,非 线性,定常,时变)? (1)22 ()()() 234()56()d y t dy t du t y t u t dt dt dt ++=+ (2)()2()y t u t =+ (3)()()2()4()dy t du t t y t u t dt dt +=+ (4)() 2()()sin dy t y t u t t dt ω+= (5)22 ()() ()2()3()d y t dy t y t y t u t dt dt ++= (6)2() ()2() dy t y t u t dt += 《自动控制原理》习题课习题讲解 第二章内容 1、试建立图示电路各系统的传递函数和微分方程。 解:(a) 应用复数阻抗概念可写出 )()(11 )(11 s U s I cs R cs R s U c r ++ = (1) 2) ()(R s Uc s I = (2) 联立式(1)、(2),可解得: Cs R R R R Cs R R s U s U r c 212112) 1()()(+++= 微分方程为: r r c c u CR dt du u R CR R R dt du 121211 +=++ (2) 由图解2-1(d )可写出 [] Cs s I s I s I R s U c R R r 1 )()()()(++= (5) )()(1 ) (s RI s RI Cs s I c R c -= (6) [] Cs s I s I R s I s U c R c c 1 )()()()(++= (7) 联立式(5)、(6)、(7),消去中间变量 )(s I C 和)(s I R ,可得: 131 2)()(2 22222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u R C dt du CR dt du u R C dt du CR dt du 2 22222221 213++=++ 2、试建立图示电路各系统的传递函数 解:由图可写出 s C R s U c 221)(+ = s C R s C R s C R s U r 11111211 1 ) (+? ++ 整理得 )()(s U s U r c = 1)(1 )(21221122121221122121+++++++s C R C R C R s C C R R s C R C R s C C R R 3、试用结构图等效化简求图2-32所示各系统的传递函数)() (s R s C 。 第二部分古典控制理论基础习题详解 一 概述 2-1-1 试比较开环控制系统和闭环控制系统的优缺点。 【解】: 控制系统优点缺点 开环控制简单、造价低、调节速度快调节精度差、无抗多因素干扰能力闭环控制抗多因素干扰能力强、调节精度高结构较复杂、造价较高 2-1-2试列举几个日常生活中的开环和闭环控制系统的例子,并说明其工作原理。 【解】: 开环控制——半自动、全自动洗衣机的洗衣过程。 工作原理:被控制量为衣服的干净度。洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。 闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。 工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。 2-1-3 试判断下列微分方程所描述的系统属何种类型(线性、非线性;定常、时变)。 【解】: (1)线性定常系统;(2)线性时变系统;(3)非线性定常系统;(4)线性定常系统。 1 2 2-1-4 根据题2-1-1图所示的电动机速度控制系统工作原理图: (1)将a ,b 与c ,d 用线连接成负反馈系统; (2)画出系统方框图。 【解】: (1)a -d 连接,b -c 连接。 (2)系统方框图 题2-1-4解图 抽头移动,电动机获得一个正电压,通过齿轮减速器传递,使阀门打开,从而增加入水流量使水位上升,当水位回到给定值时,电动机的输入电压又会回到零,系统重新达到平衡状态。反之易然。 题2-1-5解图 第一章绪论 一、自动控制技术 自动控制技术被大量应用于工农业生产、医疗卫生、环境监测、交通管理、科研开发、军事领域、特别是空间技术和核技术。自动控制技术的广泛应用不仅使各种生产设备、生产过程实现了自动化,提高了生产效率和产品质量,尤其在人类不能直接参与工作的场合,就更离不开自动控制技术了。自动控制技术还为人类探索大自然、利用大自然提供了可能和帮助。 二、自动控制理论的发展过程 1.1945年之前,属于控制理论的萌芽期。1945年,美国人伯德(Bode)的“网络分析与放大器的设计”奠定了控制理论的基础,至此进入经典控制理论时期,此时已形成完整的自动控制理论体系。 2.二十世纪六十年代初。用于导弹、卫星和宇宙飞船上的“控制系统的一般理论”(卡尔曼Kalman)奠定了现代控制理论的基础。现代控制理论主要研究多输入-多输出、多参数系统,高精度复杂系统的控制问题,主要采用的方法是以状态空间模型为基础的状态空间法,提出了最优控制等问题。 3.七十年代以后,各学科相互渗透,要分析的系统越来越大,越来越复杂,自动控制理论继续发展,进入了大系统和智能控制时期。例如智能机器人的出现,就是以人工智能、神经网络、信息论、仿生学等为基础的自动控制取得的很大进展。 三、自动控制技术与人类历史发展 1.自动计时漏壶:古代利用滴水、沙多少来计量时间的一种仪器。水漏是以壶盛水,利用水均衡滴漏原理,观测壶中刻箭上显示的数据来计算时间。历史可追溯到夏、商时期。沙漏是为了避免水因气温变化而影响计时精度而设计的。其原理是通过流沙推动齿轮组,使指针在时刻盘上指示时刻。最早记载见于元代。 2.记里鼓车:记里鼓车是中国古代用于计算道路里程的车,行一里路打一下鼓的装置,故名“记里鼓车”。记里鼓车这是一种会自动记载行程的车辆,是中国的科学家、发明家研制出的自动机械物体,被机器人专家称为是一种中国。记里鼓车的记程功能是由完成的。车中有一套减速齿轮系,始终与车轮同时转动,其最末一只在车行一里时正好回转一周,车子上层的木人受牵动,由绳索拉起木人右臂击鼓一次,以示里程。 3.指南车:指南车又称司南车,是中国古代用来指示方向的一种装置。它与指南针利用地磁效应不同,它不用磁性。它是利用机械传动系统来指明方向的一种机械装置。其原理是,靠人力来带动两轮的指南车行走,依靠车内的机械传动系统来传递转向时两车轮的差动来带动车上的指向木人与车转向的方向相反角度相同,使车上的木人指示方向,不论车子转向何方,木人的手始终指向指南车出发时设置木人指示的方向,“车虽回运而手常指南”。 4.伺服机构(servomechanism)系指经由闭和回路控制方式达到一个机械系统位置、速度、或加速度控制的系统,其中被控量为机械位置或机械位置对时间的。一个伺服系统的构成通常包含受控体(plant)、致动器(actuator)、(sensor)、(controller)等几个部分。 1.1.1 自动控制和自动控制系统 ; 自动控制原理(非自动化类)习题答案 第一章 习题 1-1(略) 1-2(略) 、 1-3 解: 受控对象:水箱液面。 被控量:水箱的实际水位 h " 执行元件:通过电机控制进水阀门开度,控制进水流量。 比较计算元件:电位器。 测量元件:浮子,杠杆。 放大元件:放大器。 h h (与电位器设定 电压 u 相对应,此时电位器电刷位于中点位置)。 当 h h 时,电位器电刷位于中点位置,电动机不工作。一但 h ≠ h 时,浮子位置相应升高(或 ' 降低),通过杠杆作用使电位器电刷从中点位置下移(或上移),从而给电动机提供一定的工作电压,驱动 电动机通过减速器使阀门的开度减小(或增大),以使水箱水位达到希望值 h 。 水位自动控制系统的职能方框图 1-4 解: 受控对象:门。 执行元件:电动机,绞盘。 放大元件:放大器。 受控量:门的位置 , 测量比较元件:电位计 工作原理:系统的被控对象为大门。被控量为大门的实际位置。输入量为希望的大门位置。 当合上开门开关时,桥式电位器测量电路产生偏差电压,经放大器放大后,驱动电动机带动绞盘转动, 使大门向上提起。同时,与大门连在一起的电位器电刷上移,直到桥式电位器达到平衡,电动机停转,开 门开关自动断开。反之,当合上关门开关时,电动机带动绞盘反转,使大门关闭。 * 仓库大门自动控制开(闭)的职能方框图 1-5 解: 系统的输出量:电炉炉温 给定输入量:加热器电压 被控对象:电炉 放大元件:电压放大器,功率放大器,减速器 比较元件:电位计 测量元件:热电偶 职能方框图: 第二章 习题 2-1 解:对微分方程做拉氏变换: ? X (s ) R (s ) ? C (s ) N (s ) ? ? X (s ) KX (s ) ? X (s ) X (s ) ? X (s ) ? ? TsX (s ) X (s ) ? X (s ) X (s ) ? KN (s ) ? ?K X (s ) sC (s ) sC (s ) ? 绘制上式各子方程的方块图如下图所示: KK C (s ) / R (s ) , Ts (T 1)s s K K 1 s s 1 s s 第1章习题参考答案 1-1 自动控制系统通常由哪些环节组成?它们在控制过程中担负什么功能? 解:见教材P4- 1-2 试比较开环控制系统和闭环控制系统的优缺点。 解:见教材P4-6 1-7题1-7图是仓库大门自动控制系统原理示意图。试说明系统自动控制大门开闭的工作原理并画出系统原理方框图。 解: 当合上开门开关时, 电桥会测量出开门位置与开门实际位置间的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起,与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制,系统原理方框如下图所示。 电桥电路放大器电动机绞盘大门 _ 期望门位实际门位 仓库大门控制系统原理方框图 1-8 电冰箱制冷系统工作原理如题1-8图所示。试简述系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统原理方框图。 题1-8图电冰箱制冷系统工作原理 题1-7图仓库大门自动开闭控制系统原 解: 电冰箱制冷系统结构如下图 电冰箱制冷系统结构图 系统的控制任务是保持冰箱内温度c T 等于给定温度r T 。冰箱体是被控对象;箱内温度是被控量,希望的温度r T 为给定量(由电位器的输出电压r U 对应给出);继电器、压缩机、蒸发器、冷却器所组成制冷循环系统起执行元件的作用。 温度控制器中的双金属温度传感器(测量元件)感受冰箱内的温度并转换为电压信号c U ,与控制器旋钮设定的电位器输出电压r U (对应于希望温度r T )相比较,构成偏差电压c r U U U -=?(表征希望温度与实际温度的偏差),控制继电器K 。当U ?大到一定值时,继电器接通,压缩机启动,将蒸发器中的高温低压制冷剂送往冷却器散热,降温后的低温低压制冷剂被压缩成低温高压液态进入蒸发器,急速降压扩展成气体,吸收箱体内的热量,使箱体的温度下降;而高温低压制冷剂又被吸入冷却器。如此循环,使冰箱达到制冷的效果。电冰箱控制系统的原理方框图如下图所示。 电冰箱控制系统的原理方框图 自动控制原理课后答案 1 请解释下列名字术语:自动控制系统、受控对象、扰动、给定值、参考输入、反馈。 解:自动控制系统:能够实现自动控制任务的系统,由控制装置与被控对象组成;受控对象:要求实现自动控制的机器、设备或生产过程 扰动:扰动是一种对系统的输出产生不利影响的信号。如果扰动产生在系统内部称为内扰;扰动产生在系统外部,则称为外扰。外扰是系统的输入量。 给定值:受控对象的物理量在控制系统中应保持的期望值 参考输入即为给定值。 反馈:将系统的输出量馈送到参考输入端,并与参考输入进行比较的过程。 2 请说明自动控制系统的基本组成部分。 解:作为一个完整的控制系统,应该由如下几个部分组成: ①被控对象:所谓被控对象就是整个控制系统的控制对象; ②执行部件:根据所接收到的相关信号,使得被控对象产生相应的动作;常 用的执行元件有阀、电动机、液压马达等。 ③给定元件:给定元件的职能就是给出与期望的被控量相对应的系统输入量(即参考量); ④比较元件:把测量元件检测到的被控量的实际值与给定元件给出的参考值 进行比较,求出它们之间的偏差。常用的比较元件有差动放大 器、机械差动装置和电桥等。 ⑤测量反馈元件:该元部件的职能就是测量被控制的物理量,如果这个物理量 是非电量,一般需要将其转换成为电量。常用的测量元部件有 测速发电机、热电偶、各种传感器等; ⑥放大元件:将比较元件给出的偏差进行放大,用来推动执行元件去控制被 控对象。如电压偏差信号,可用电子管、晶体管、集成电路、 晶闸管等组成的电压放大器和功率放大级加以放大。 ⑦校正元件:亦称补偿元件,它是结构或参数便于调整的元件,用串联或反 馈的方式连接在系统中,用以改善系统的性能。常用的校正元 件有电阻、电容组成的无源或有源网络,它们与原系统串联或 与原系统构成一个内反馈系统。 3 请说出什么是反馈控制系统,开环控制系统和闭环控制系统各有什么优缺点? 解:反馈控制系统即闭环控制系统,在一个控制系统,将系统的输出量通过某测量机构对其进行实时测量,并将该测量值与输入量进行比较,形成一个反馈通道,从而形成一个封闭的控制系统; 开环系统优点:结构简单,缺点:控制的精度较差; 闭环控制系统优点:控制精度高,缺点:结构复杂、设计分析麻烦,制造成本高。 4 请说明自动控制系统的基本性能要求。 解:(1)稳定性:对恒值系统而言,要求当系统受到扰动后,经过一定时间的调整能够回到原来的期望值。而对随动系统而言,被控制量始终跟踪参考量的变化。稳定性通常由系统的结构决定的,与外界因素无关,系统的稳定性是对系统的基本要求,不稳定的系统不能实现预定任务。 自动控制原理第六章课后习题答案(免费) 线性定常系统的综合 6-1 已知系统状态方程为: ()100102301010100x x u y x ? -???? ? ?=--+ ? ? ? ????? = 试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3. 解: 由()100102301010100x x u y x ? -???? ? ?=--+ ? ? ? ????? =可得: (1) 加入状态反馈阵()012K k k k =,闭环系统特征多项式为: 32002012()det[()](2)(1)(2322)f I A bK k k k k k k λλλλλ=--=++++-+--+- (2) 根据给定的极点值,得期望特征多项式: *32()(1)(2)(3)6116f λλλλλλλ=+++=+++ (3) 比较()f λ与*()f λ各对应项系数,可得:0124,0,8;k k k === 即:()408K = 6-2 有系统: ()2100111,0x x u y x ? -????=+ ? ?-????= (1) 画出模拟结构图。 (2) 若动态性能不能满足要求,可否任意配置极点? (3) 若指定极点为-3,-3,求状态反馈阵。 解(1) 模拟结构图如下: (2) 判断系统的能控性; 0111c U ?? =?? -?? 满秩,系统完全能控,可以任意配置极点。 (3)加入状态反馈阵01(,)K k k =,闭环系统特征多项式为: ()2101()det[()](3)22f I A bK k k k λλλλ=--=+++++ 根据给定的极点值,得期望特征多项式: *2()(3)(3)69f λλλλλ=++=++ 比较()f λ与*()f λ各对应项系数,可解得:011,3k k == 即:[1,3]K = 第 一 章 1-1 图1-2是液位自动控制系统原理示意图。在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。 图1-2 液位自动控制系统 解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液 位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度 不变。 工作原理:当电位电刷位于中点(对应 r u )时,电动机静止不动,控制阀门有一定的 开度,流入水量与流出水量相等,从而使液面保持给定高度 r c ,一旦流入水量或流出水量 发生变化时,液面高度就会偏离给定高度r c 。 当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c 。 反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c 。 系统方块图如图所示: 1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统? (1) 222 ) ()(5)(dt t r d t t r t c ++=; (2))()(8) (6)(3)(2 233t r t c dt t dc dt t c d dt t c d =+++; (3) dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω; (5)?∞-++=t d r dt t dr t r t c τ τ)(5) (6)(3)(; (6))()(2 t r t c =; (7)???? ?≥<=.6),(6,0)(t t r t t c 解:(1)因为c(t)的表达式中包含变量的二次项2 ()r t ,所以该系统为非线性系统。 (2)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该 系统为线性定常系统。 (3)该微分方程不含变量及其导数的高次幂或乘积项,所以该系统为线性系统,但第一项 () dc t t dt 的系数为t ,是随时间变化的变量,因此该系统为线性时变系统。 (4)因为c(t)的表达式中r(t)的系数为非线性函数cos t ω,所以该系统为非线性系统。 (5)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。 (6)因为c(t)的表达式中包含变量的二次项2()r t ,表示二次曲线关系,所以该系统为非 线性系统。 (7)因为c(t)的表达式可写为()()c t a r t =?,其中 0(6) 1(6)t a t ? 第一章: 例1试举几个工业生产中开环与闭环自动控制系统的例子,画出它们的框图,并说明它们的工作原理,讨论其特点。 答 图1-1所示为直流电动机的开环控制系统示意图。 图1-1 直流电动机开环控制系统示意图 该系统的结构图可用图1-2表示。 图1-2 开环系统结构图 在本系统中,要控制的是直流电动机的转速,所以直流电动机是控制对象,直流电动机的转速是系统的输出量。在励磁电流I f与负载恒定的条件下,当电位器滑动端在某一位置时 U表示),电动机就以一定的转速n运转。如果由于外部或内部(电位器对应的输出电压用 g 扰动,例如由于负载突然增加,使电动机转速下降,那么电动机在无人干预的情况下将偏离给定速度。也就是说开环控制系统只有输入量对输出量产生作用,而没有输出对输入的反作用。 图1-3所示为直流电动机的闭环控制系统示意图。 图1-3 直流电动机闭环控制系统示意图 该系统的结构图如图1-4所示。 图1-4 闭环控制结构图 这里,用测速发电机将输出量n 检测出来,并转换成与给定电压物理量相同的反馈电压f U ,然后反馈到输入端与给定电压g U 相比较,其偏差U 经过运算放大器放大后,用来控制功率放大器的输出电压U 和电动机的转速n 。当电位器滑动到某一位置时,电动机就以一个指定的转速转动。由于外部或内部扰动,例如,由于负载突然增加,使电动机转速降低,那么这一速度的变化,将由测速机检测出来。此时反馈电压相应降低,与给定电压比较后,偏差电压增大,再经过功率放大器放大后,将功率放大器输出电压U 升高,从而减小或消除电动机的转速偏差。这样,不用人的干预,系统就可以近似保持给定速度不变。由此可看出,闭环系统是把输出量反馈到输入端形成闭环,使得输出量参与系统的控制。 例2 图P1-3为液位自动控制系统示意图。在任何情况下,希望液面高度h 维持不变。试说明系统工作原理,并画出系统结构图。 图P1-3 液位自动控制系统示意图 答 (1)工作原理:闭环控制方式。 当电位器电刷位于中点位置时,电动机不动,控制阀门有一定的开度,使水箱中流入水量和流出水量相等,从而液面保持在希望高度上。当进水或出水量发生变化,例如液面下降,通过浮子和杠杆检测出来,使电位器电刷从中点位置上移,从而给电动机提供一定的控制电压,驱动电动机通过减速器开大阀门开度,使液位上升,回到希望高度。电位器电刷回到中点,电动机停止。 (2)被控对象是水箱,被控量是水箱液位,给定量是电位器设定位置(代表液位的希望值)。 主扰动是流出水量。 系统的方框图如图1-7所示。 《自动控制原理》习题解答 第一章习题及答案 1-1 根据题1-1图所示的电动机速度控制系统工作原理图 (1) 将a ,b 与c ,d 用线连接成负反馈状态; (2) 画出系统方框图。 解 (1)负反馈连接方式为:d a ?,c b ?; (2)系统方框图如图解1-1 所示。 1-2 题1-2图是仓库大门自动控制系统原理示意图。试说明系统自动控制大门开闭的工作原理,并画出系统方框图。 题1-2图 仓库大门自动开闭控制系统 解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。系统方框图如图解1-2所示。 1-3 题1-3图为工业炉温自动控制系统的工作原理图。分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。 题1-3图 炉温自动控制系统原理图 解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比, c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动 机驱动。炉子的实际温度用热电偶测量,输出电压f u 。 f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。 在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。 当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程: 控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。 ?→T C ?→↑→↑→↑→↑→↑→↓→↓T u u u u u c a e f θ1C ↑ 系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压r u (表征炉温的希望值)。系统方框图见图解1-3。 1-4 题1-4图是控制导弹发射架方位的电位器式随动系统原理图。图中电位器1P 、2P 并 第一讲思考题 1.说说服务自动化对现在生活的影响。 服务自动化的发展,将改变服务业,深刻影响我们的生活。家庭生活服务自动化把人们从繁重的家务劳动中解放出来,各种机器人代替人们去做家务,人们生活更轻松、舒适;楼宇服务自动化提高了建筑的品质,将水、电、供热、供气、安全服务综合一体,能达到节能、自控、环保的目的,提高环境的舒适性,减少安全隐患;交通服务自动化规范且方便了人们的出行,智能交通灯让人们的交通出行有秩序,减少交通事故发生,电子不停车收费系统ETC 提高了交通通行率,节约了人们的时间。总之,服务自动化提高了服务效 率和服务质量,并降低了服务成本。 2.以日常生活中的自动化设备为例,说说其工作原理 冰箱的工作原理:制冷剂在蒸发器里由低压液体汽化为气体,吸收冰箱内 的热量,使箱内温度降低。变成气的制冷剂被压缩机吸入,靠压缩机做 功把它压缩成高温高压的气体,再排入冷凝器。在冷凝器中不断向周围空间放热,逐步凝结成液体。这些高压液体必须流经毛细管,节流降压才能缓慢流入蒸发器,维持在蒸发器里继续不断地汽化,吸热降温。就这样,冰箱利用电能做功,借助制冷剂的物态变化,把箱内蒸发器周围的热量搬送到箱后冷凝器里去放出,如此周而复始不断地循环,以达到制冷目的。 第二讲思考题 1.画出如下指南车的前馈控制方框图 2.都是负反馈闭环控制,水位控制与导弹打飞机有什么本质不同 水位控制中,水位的期望值是不变的,而导弹打飞机中,导弹的希望轨迹是在改变的,导弹打飞机比水位控制复杂得多,水位控制中是实际液位跟踪不变的希望液位,控制水位相对简单,导弹打飞机中,由于导弹的希望轨迹是在不断变化的,要根据飞机飞行方向不断调整导弹的飞行轨迹,使导弹的实际飞行轨迹与希望轨迹靠拢。 第三讲思考题 1.工业PC与个人PC均为基于MPU的微型计算机,有什么区别? 二者在应用的侧重面有所不同。工业PC侧重数据的处理运算、监测、统计和控制等方面的应用,个人PC则是以信息传递、文字处理、娱乐等方面为主。很多工业PC不仅要处理大量的数据,还要同时控制相应的设备运行,所以它的数据运算、处理能力非常强大,运算速度极快,这些工业PC配置很高,个人PC是不能和它相比的。个人PC的显示功能较强,高配置的都会配有功能卓越的显卡,而有的工业PC对此没有很高的要求。 2.工业网络和互联网、手机移动网络有什么区别? 工业通信网络称之为总线的方式,它相当于一组线来连接所有的设备,工业网络总线很多,工业产品要使用好些不同种类的网络,比如一辆汽车要使用以太网、CAN总线、MOST总线、LIN总线、FlexRay总线,并且这些网络用于不同的控制目的。工业网络标准太多,各厂商从自身利益考虑会极力推行自己的网络标准。不同的网络协议针对特定的应用领域,因而具有 自动控制原理1 一、 单项选择题(每小题1分,共20分) 1. 系统和输入已知,求输出并对动态特性进行研究,称为( c ) A.系统综合 B.系统辨识 C.系统分析 D.系统设计 2. 惯性环节和积分环节的频率特性在( d )上相等。 A.幅频特性的斜率 B.最小幅值 C.相位变化率 D.穿越频率 3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( d ) A.比较元件 B.给定元件 C.反馈元件 D.放大元件 4. ω从0变化到+∞时,延迟环节频率特性极坐标图为(a ) A.圆 B.半圆 C.椭圆 D.双曲线 5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( d ) A.比例环节 B.微分环节 C.积分环节 D.惯性环节 6. 若系统的开环传 递函数为 2) (5 10+s s ,则它的开环增益为(c ) A.1 B.2 C.5 D.10 7. 二阶系统的传递函数5 2 5 ) (2 ++= s s s G ,则该系统是(b ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统 8. 若保持二阶系统的ζ不变,提高ωn ,则可以(b ) A.提高上升时间和峰值时间 B.减少上升时间和峰值时间 C.提高上升时间和调整时间 D.减少上升时间和超调量 9. 一阶微分环节Ts s G +=1) (,当频率T 1= ω时,则相频特性)(ωj G ∠为( a ) A.45° B.-45° C.90° D.-90° 10.最小相位系统的开环增益越大,其( d ) A.振荡次数越多 B.稳定裕量越大 C.相位变化越小 D.稳态误差越小 11.设系统的特征方程为()0516178234 =++++=s s s s s D ,则此系统 ( ) A.稳定 B.临界稳定 C.不稳定 D.稳定性不确定。 12.某单位反馈系统的开环传递函数为:()) 5)(1(++= s s s k s G ,当k =( )时,闭环系统临界稳定。 A.10 B.20 C.30 D.40 13.设系统的特征方程为()025103234=++++=s s s s s D ,则此系统中包含正实部特征的个数有( ) A.0 B.1 C.2 D.3 14.单位反馈系统开环传递函数为()s s s s G ++= 65 2,当输入为单位阶跃时,则其位置误差为( ) A.2 B.0.2 C.0.5 D.0.05 15.若已知某串联校正装置的传递函数为1 101 ) (++= s s s G c ,则它是一种( ) A.反馈校正 B.相位超前校正(完整版)自动控制原理课后习题及答案
自动控制原理-胡寿松第5版-课后习题及答案-完整(汇编)
自动控制原理答案(第二版)+中国电力出版社
自动控制原理第一章教案
自动控制原理答案完全版-第二版(孟庆明)
(完整版)自动控制原理第1章习题参考答案
胡寿松版完整答案自动控制原理第五版课后习题答案
自动控制原理第六章课后习题答案(免费)
自动控制原理课后答案(第五版)
自动控制原理第一章习题
自动控制原理习题1(含答案)
2015-《自动化专业概论》结课作业-自1501班-彭孝德
自动控制原理第六版期末考试八套习题集要点