传感器综合实验仿真报告
综合实验报告
( 2015 -- 2016年度第一学期)
名称:传感器原理与应用题目:综合实验—仿真部分院系:控制与计算机工程班级:测控1303
学号:1131160318
学生姓名:魏更
指导教师:
设计周数:一周
成绩:
日期:2016 年1月15日
一、课程设计(综合实验)的目的与要求
1、本实验的目的是配合《传感器原理与应用》课程的传感器静态特性与动态特性相关部分的内容,利用Matlab/Simulink 进行仿真验证。培养学生利用计算机进行数据处理和模型仿真的能力,为今后从事相关领域的工作打下基础。
2、要求学生了解传感器静态和动态特性的基础知识,掌握Matlab/Simulink 进行数据分析和仿真的基本方法。具体要求为:掌握基于最小二乘法的数据处理方法,能够进行简单的数据处理;掌握传感器动态特性的分析手段,了解不同阶次特性的基本性质,并能够进行相应的仿真实验,对传感器动态特性有感性认识。
二、实验正文
1、学习使用Matlab 进行最小二乘法数据处理,分别通过自己编写函数和使用Matlab 提供的函数实现相同功能。
①按照最小二乘法原理编写Matlab 程序。
程序如下:
x=(-200:100:1300);
y=[-5.8914,-3.5536,0,4.0962,8.1385,12.2086,16.3971,20.6443,24.9055,29.129,33.2754,37.3259,41.2756,45.
1187,48.8382,52.4103];
z1=sum(x);
z2=z1^2;
z3=sum(power(x,2));
z4=sum(x.*y);
z5=sum(y);
n=length(x);
k=(n*z4-z1*z5)/(n*z3-z2);
a0=(z3*z5-z1*z4)/(n*z3-z2);
fprintf('k=%f\n',k);
fprintf('a0=%f',a0);
y1=k*x+a0;
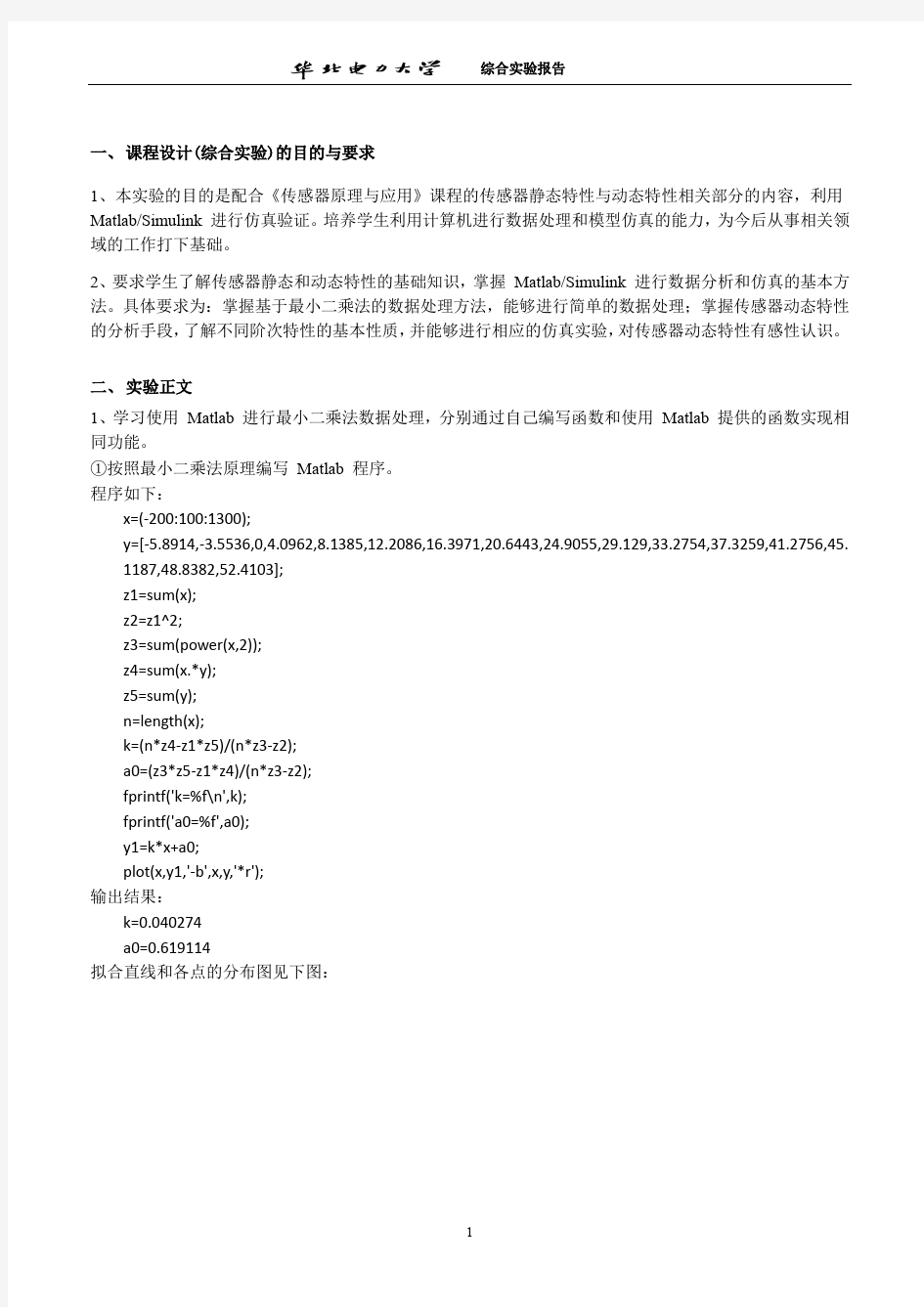
plot(x,y1,'-b',x,y,'*r');
输出结果:
k=0.040274
a0=0.619114
拟合直线和各点的分布图见下图:
②采用 Matlab 自带的拟合函数进行线性拟合,对前面的结果验证。 程序如下:
clc syms yt xt; m1=0; m2=0; m3=0; m4=0;
x=(-200:100:1300);
y=[-5.8914,-3.5536,0,4.0962,8.1385,12.2086,16.3971,20.6443,24.9055,29.129,33.2754,37.3259,41.2756,45.1187,48.8382,52.4103]; figure(1);
subplot(3,1,1);stem(x,y,'fill'); xlabel('温度/℃');
ylabel('K 型热电偶分度/mV'); title('原始数据点'); axis([-300 1400 -15 60]); for i=1:16; m1=m1+x(i); m2=m2+y(i); m3=m3+x(i)*y(i); m4=m4+x(i)*x(i); end
-200
0200400600800100012001400
k=(16*m3-m1*m2)/(16*m4-m1^2);
a0=(m4*m2-m1*m3)/(16*m4-m1^2);
xt=x;
yt=a0+k*xt;
subplot(3,1,2);plot(xt,yt);
xlabel('温度/℃');
ylabel('K型热电偶分度/mV');
title('最小二乘法程序拟合曲线');
axis([-300 1400 -15 60]);
a=polyfit(x,y,1);
xi=-200:0.001:1300;
yi=polyval(a,xi);
subplot(3,1,3);plot(xi,yi);
xlabel('温度/℃');
ylabel('K型热电偶分度/mV');
title('matlab自带拟合函数拟合曲线');
axis([-300 1400 -15 60]);
k
a0
a
figure(2);
stem(x,y,'fill');
xlabel('温度/℃');
ylabel('K型热电偶分度/mV');
axis([-300 1400 -15 60]);
hold on;
plot(xi,yi);
legend('原始数据点',’拟合曲线’);
sprintf('自带函数拟合直线方程:Y=%0.5gx+%0.5g',a(1),a(2))
输出结果:
k =
0.0403
a0 =
0.6191
a =
0.0403 0.6191
ans =
自带函数拟合直线方程:Y=0.040274x+0.61911
由输出结果可知依据最小二乘法编写的程序与matlab 自带函数相吻合。
③采用 Matlab 自带的拟合函数进行二次曲线拟合,并给出线性拟合的误差分析。 程序如下:
clc
x=(-200:100:1300);
y=[-5.8914,-3.5536,0,4.0962,8.1385,12.2086,16.3971,20.6443,24.9055,29.129,33.2754,37.3259,41.2756,45.1187,48.8382,52.4103];
-200
200
400
6008001000
1200
1400
2040
60温度/℃
K 型热电偶分度/m V
原始数据点
-200
200
400
60080010001200
1400
2040
60温度/℃
K 型热电偶分度/m V 最小二乘法程序拟合曲线
-200
200
400
600800
1000
1200
1400
2040
60温度/℃
K 型热电偶分度/m V matlab 自带拟合函数拟合曲线-200
200
400
600800
1000
1200
1400
-10
010203040
5060温度/℃
K 型热电偶分度/m V
b=polyfit(x,y,2); xj=-200:0.001:1300; yj=polyval(b,xj); stem(x,y,'fill');
xlabel('温度/℃');
ylabel('K 型热电偶分度/mV'); axis([-300 1400 -15 60]); hold on; plot(xj,yj);
legend('原始数据点',’二次拟合曲线’);
sprintf('二次曲线方程:Y=(%0.5g )x^2+%0.5gx+%0.5g',b(1),b(2),b(3))
输出结果:
ans =
二次曲线方程:Y=(4.7012e-07)x^2+0.039757x+0.66142
线性拟合误差分析:
clc
x=(-200:100:1300);
y=[-5.8914,-3.5536,0,4.0962,8.1385,12.2086,16.3971,20.6443,24.9055,29.129,33.2754,37.3259,41.2756,45.1187,48.8382,52.4103]; c=polyfit(x,y,1); yn=polyval(c,x); s=yn-y; m=max(s)
v=m/(c(1)*(1300-c(1)*(-200)))
-200
200
400
600800
1000
1200
1400
-10
010203040
5060温度/℃
K 型热电偶分度/m V
输出结果:
m =
0.6191
v =
0.0118
所以线性拟合后的最大偏差为0.6191mV,线性度为1.18%。
2、学习传感器动态特性,包括零阶、一阶和二阶传感器动态特性,并采用Matlab/Simulink 进行仿真验证。
①对零阶传感器的动态特性进行仿真,并对仿真结果进行讨论。
零阶传感器的方程为:
Y(t)=KX(t), 式中K----静态灵敏度。
零阶传感器的传递函数为:
Y/X(D)=Y/X(S)=Y/X(jw)=b0/a0=K
仿真程序图与结果图如下:
当K=1.5时
由图可见零阶传感器其输出与输入成正比,并且与信号频率无关,因此无幅值和相位失真问题,因此零阶传感器具有理想的动态特性。
②对一阶传感器的动态特性进行仿真,并对仿真结果进行讨论。
一阶传感器的方程用算子式表示可写成:
(TD+1)Y(t)=KX(t), 式中K---静态灵敏度;T---时间常数。
一阶传感器的运算传递函数为:W(D)=Y/X(D)=K/(1+TD); 拉氏传递函数为:
W(S)=Y/X(S)=K/(1+TS);
频率传递函数为:
W(jw)=Y/X(jw)=K/(1+Tjw); 仿真程序图与结果图如下:
由图可见随着时间的推移正弦信号输出越来越趋于稳定的正弦波,阶跃信号输出越来越接近于1。
③对二阶传感器的动态特性进行仿真,并对仿真结果进行讨论,特别需要对阻尼比系数分情况进行讨论。运算传递函数为:
W(D)=Y/X(D)=K/(D^2/w0^2+2§D/w0+1)
拉式传递函数为:
W(S)=Y/X(S)=K/(S^2/w0^2+2§S/w0+1)
频率传递函数为:
W(jw)=Y/X(jw)=K/(jw^2/w0^2+2§jw/w0+1)
仿真程序图与结果图如下:
其中§分别为0.5、1、1.5。
由图中看出:
欠阻尼§<1时,阶跃函数出现过冲,即超过稳定值,经过一段时间振荡趋于稳定进入±5%误差带;正弦信号能经过一定时间稳定与原信号曲线幅值一致。
临界阻尼§=1时,无过冲现象,经过一段时间趋于原阶跃信号,其所需时间比欠阻尼短;正弦函数稳定后幅值比原信号小。
过阻尼§>1时,无过冲现象,经过一段时间趋于原阶跃信号,其所需时间比临界阻尼短;正弦函数稳定后幅值比原信号小,且比临界阻尼小。
由上可知在§≥1时:§越小,阶跃信号输出越快的趋向于阶跃原信号;§越小,正弦信号输出函数幅值越大。
三、课程设计(综合实验)总结或结论
1、通过这一个星期的课程设计与学习,我重温了一遍传感器原理的基本概念及相关理论,巩固了MATLAB基本使用方法,掌握了MA TLAB处理的基本编程技术,实现了数据的最小二乘法线性拟合及传感器的仿真。
2、MA TLAB是一个很好的编程平台,我要在今后的学习中继续深入学习,让MA TLAB发挥更大的作用,以帮助学习高深知识。
3、传感器课程设计虽然只有短短的一周,但是它是我们向工程问题靠近的很重要的训练,要体会理论知识必须联系实际,这样才是学习的最佳途径。
四、参考文献
[1] 王化祥,张淑英传感器原理及应用天津大学出版社第三版2007.2
大学物理仿真实验报告材料-碰撞与动量守恒
大学物理仿真实验报告 实验名称 碰撞与动量守恒 班级: : 学号: 日期:
碰撞和动量守恒 实验简介 动量守恒定律和能量守恒定律在物理学中占有非常重要的地位。力学中的运动定理和守恒定律最初是冲牛顿定律导出来的,在现代物理学所研究的领域中存在很多牛顿定律不适用的情况,例如高速运动物体或微观领域中粒子的运动规律和相互作用等,但是能量守恒定律仍然有效。因此,能量守恒定律成为了比牛顿定律更为普遍适用的定律。 本实验的目的是利用气垫导轨研究一维碰撞的三种情况,验证动量守恒和能量守恒定律。定量研究动量损失和能量损失在工程技术中有重要意义。同时通过实验还可提高误差分析的能力。 实验原理 如果一个力学系统所受合外力为零或在某方向上的合外力为零,则该力学系统总动量守恒或在某方向上守恒,即 (1) 实验中用两个质量分别为m1、m2的滑块来碰撞(图4.1.2-1),若忽略气流阻力,根据动量守恒有 (2) 对于完全弹性碰撞,要求两个滑行器的碰撞面有用弹性良好的弹簧组成的缓冲器,我们可用钢圈作完全弹性碰撞器;对于完全非弹性碰撞,碰撞面可用尼龙搭扣、橡皮泥或油灰;一般非弹性碰撞用一般金属如合金、铁等,无论哪种碰撞面,必须保证是对心碰撞。 当两滑块在水平的导轨上作对心碰撞时,忽略气流阻力,且不受他任何水平方向外力的影响,因此这两个滑块组成的力学系统在水平方向动量守恒。由于滑块作一维运动,
式(2)中矢量v可改成标量,的方向由正负号决定,若与所选取的坐标轴方向相同则取正号,反之,则取负号。 1.完全弹性碰撞 完全弹性碰撞的标志是碰撞前后动量守恒,动能也守恒,即 (3) (4) 由(3)、(4)两式可解得碰撞后的速度为 (5) (6) 如果v20=0,则有 (7) (8) 动量损失率为 (9) 能量损失率为 (10) 理论上,动量损失和能量损失都为零,但在实验中,由于空气阻力和气垫导轨本身的原因,不可能完全为零,但在一定误差围可认为是守恒的。 2.完全非弹性碰撞 碰撞后,二滑块粘在一起以10同一速度运动,即为完全非弹性碰撞。在完全非弹性碰撞中,系统动量守恒,动能不守恒。 (11) 在实验中,让v20=0,则有 (12) (13) 动量损失率 (14) 动能损失率 (15) 3.一般非弹性碰撞
照度实验报告
照度实验报告 一、背景 作业场所的合理采光与照明,对生产中的效率、卫生和安全都有重要的意义。它是工作 场所设计中的重要项目,无论是天然采光还是人工照明,其主要目的都是给人们的生活和生 产提供必需的视觉条件。 适当的照度设计应遵循工效学的原则,使照度设置达到保证物体的轮廓立体视觉,有利 于辨认物体的高低,深浅,前后远近及相对位置,有利于眼睛的辨色能力,有利于大视野, 降低疲劳、减少错误和工伤事故的发生。提高照度值可以提高识别速度和主体视觉,从而提 高工作效率和准确度。但照度值提高到使人产生眩光时,会降低工作效率。此外,利用照明 设计对人的情绪的影响,根据场所功能的需求,可使光环境对人产生兴奋或抑制的作用。在 绿色照明理念的指导下,人工照明应考虑节能和环保的要求。 二、实验目的 正确熟悉和使用照度计,采集光环境数据,并通过分析数据来判断光环境的照度是否合 理,假如不合理则提出合理的改善措施。 三、实验场所 上海海洋大学图书馆二楼大厅自习室(室外) 四、实验要求 1、照度采集 2、对自习室的照度情况进行分析 3、分析光照度合理性,并提出改善措施 五、分析 1、主观分析 (1)、主观评价调查数据 (2)、主观评价结果分析 a、计算每个项目的评分s(n): s(n)= 式中,s(n)为第n个项目的评分 p(m)为第m个状态的分值,其中,p(1)=0,p(2)=10,p(3)=50,p(4)=100, v (n,m)为第n个评价项目的第m个状态所得的票数。所以: s(1)= s(2)= s(3)= s(4)= s(5)= s(6)= =16.4 =10.8 =12.4 =12.6 =12.4 =12.6 s(7)= s(8)= s(9)= s(10)= b、计算总的光环境指数 s s= =9.2 =8.2 =9.4 =10 式中,w(n)为第n个评价项目权值,设其权值均为1 所以: s=11.4 为了便于分析和确定评价结果,本方法将光环境质量按光环境的指数范围分为四个质量 等级,其质量等级的划分及其含意如下表所示: 因为10<11.4<=50所以根据上表的结论,本实验的光环境质量等级为3,含义是: 问题较大 2、客观分析(照度数据采集及分析)(1)、照度采集现场 在进行照度值测量的时间点上我们选择了一个晴朗的下午2点~3点之间,光照十分充足, 因为时间和条件的限制就没有对阴天和晚上进行测量和分析。 图书馆二楼自习室现场
智能车实验报告
宁波大学 创新性开放实验报告题目基于光电传感器的自动寻迹小车 学号: 姓名: 专业: 指导教师: 目录 光电感应智能车............................................................................................. 错误!未定义书签。
一、硬件系统…………………………………………………………………………………错误!未定义书签。 (一)硬件框图 (3) 1、电源模块 (4) 2、寻迹模块 (4) 3、驱动模块 (5) 4、测速模块 (6) 二、软件系统 (7) (一)主程序流程图 (7) 1、电机驱动 (8) 2、舵机驱动 (10) 参考文献 (13)
光电感应自动寻迹智能车 【摘要】如果把自动寻迹小车成比例的扩大数倍,就成为真正有意义上的智能车,可以运用于军事、民用领域,对未来汽车行业的发展有一定的借鉴意义。通过光电传感器来寻找轨迹,以所编写的程序为软件支持,通过单片机计算生成相应的控制参数,驱动电机来使小车按照轨迹运动。其中小车在直线行驶过程控制参数保持不变,匀速行驶,而在小车要转弯之前则要先减速以防止小车过弯时冲出赛道,弯道过去之后在加速行驶以减少行驶时间。 【关键词】红外传感器;PID控制;自动寻迹 一、硬件系统 (一)智能小车的整体结构图 智能车通过单片机来接受和发出参数状态信号,电源模块是给智能车各个模块提供电压以使模块可以正常运作,寻迹模块则是包含着参数输送给单片机的作用,驱动模块是小车动起来的根源,测速模块是为了控制车速以使智能车平稳的沿着车道运行。
大物实验模拟仿真实验报告
西安交通大学实验报告 课程:数据结构实验实验名称:利用单摆测量重力加速度 系别:实验日期: 专业班级:实验报告日期: 姓名:学号: 第 1页 / 共3页 一、实验简介 单摆实验是个经典实验,许多著名的物理学家都对单摆实验进行过细致的研究。本实验的目的是学习进行简单设计性实验的基本方法,根据已知条件和测量精度的要求,学会应用误差均分原则选用适当的仪器和测量方法,学习累积放大法的原理和应用,分析基本误差的来源及进行修正的方法。 二、实验原理 单摆的结构参考图1单摆仪,一级近似的周期公式为 由此通过测量周期摆长求重力加速度。 三、实验内容 1、设计要求: (1) 根据误差均分原理,自行设计试验方案,合理选择测量仪器和方法. (2) 写出详细的推导过程,试验步骤. (3) 用自制的单摆装置测量重力加速度g,测量精度要求△g/g < 1%. 2、可提供的器材及参数: 游标卡尺、米尺、千分尺、电子秒表、支架、细线(尼龙线)、钢球、摆幅测量标尺(提供硬白纸板自制)、天平(公用).
假设摆长l≈70.00cm;摆球直径D≈2.00cm;摆动周期T≈1.700s; 米尺精度△米≈ 0.05cm;卡尺精度△卡≈0.002cm;千分尺精度△千≈0.001cm;秒表精度△秒≈0.01s;根据统计分析,实验人员开或停秒表反应时间为0.1s左右,所以实验人员开,停秒表总的反应时间近似为△人≈0.2s. 3、对重力加速度g的测量结果进行误差分析和数据处理,检验实验结果是否达到设计要求. 4、自拟实验步骤研究单摆周期与摆长,摆角,悬线的质量和弹性系数,空气阻力等因素的关系,试分析各项误差的大小. 5、自拟试验步骤用单摆实验验证机械能守恒定律. 四、实验仪器 单摆仪,摆幅测量标尺,钢球,游标卡尺 五、实验操作 1. 用米尺测量摆线长度; 2. 用游标卡尺测量小球直径; 3. 把摆线偏移中心不超过5度,释放单摆,开始计时,单摆摆过50个周期后停止计时,记录所用时间; 六、实验结果
光电计数器实验报告
光电计数器实验报告 学生姓名李志 学号081244115 专业名称光信息科学与技术 指导教师易煦农 时间日期2011-10-19 摘要 21世纪是信息时代,是获取信息,处理信息,运用信息的时代。传感与检测技术的重要性在于它是获得信息并对信息进行必要处理 的基础技术,是获取信 息和处理加工信息的手段,无法获取信息则无法运用信息。 光电式传感器是将光信号转化为电信号的一种传感器。它的理论基础是光电效应。这类效应大致可分为三类。第一类是外光电效应,即在光照射下,能使电子逸出物体表面。利用这种效应所做成的器件有真空光电管、光电倍增管等。第二类是内光电效应,即在光线照射下,能使物质的电阻率改变。这类器件包括各类半导体光敏电阻。第三类是光生伏特效应,即在光线作用下,物体内产生电动势的现象,此电动势称为光生电动势。这类器件包括光电池、光电晶体管等。光电效应都是利用光电元件受光照后,电特性发生变化。敏感的光波长是在可见光附近,包括红外波长和紫外波长。数字式电子计数器有直观和计数精确的优点,目前已在各种行业中普遍使用。数字式电子计
数器有多种计数触发方式,它是由实际使用条件和环境决定的。有采用机械方式的接触式触发的,有采用电子传感器的非接触式触发的,光电式传感器是其中之一,它是一种非接触式电子传感器。采用光电传感器制作的光电式电子计数器。这种计数器在工厂的生产流水线上作产品统计,有着其他计数器不可取代的优点。 【关键词】光电效应光电传感器光电计数器 ABSTRACT The 21st century is the age of information, it is the access to information, treatment information, use of the information age. Sensing and detection technology is important because it is the access to information and the information necessary to deal with the underlying technology, is access to information and means of processing information, unable to get information you won't be able to use information. Photoelectric sensor is a light signal into an electric signal of the sensor. It is the theoretical basis of the photoelectric effect. These effects can be broadly divided into three categories. The first type is outside of the photoelectric effect, namely, in daylight, can make the tungsten surface. Use this effect caused by device with vacuum photocell, photomultiplier tubes, etc. The second category is the photoelectric effect, i.e., in the light, can make the electrical resistivity of the material change. Such devices include various types of photosensitive semiconductor. The third category is photo voltaic effect, in the light, the objects within the EMF EMF, this is called light-induced electromotive force. This class of
光电传感器的设计
光电传感器的设计-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
光电传感器的设计 题目:光电传感器的设计 院(系):信息工程学院 专业:光电信息科学与工程 姓名:褚飞亚 学号: 20 指导教师:张洋洋 2016年6月27号
摘要 随着信息技术的迅猛发展,传感器的应用技术也在飞速发展,新的应用技术呈现出爆炸式的发展。传感器作为作为测控系统中对象信息的入口,作为捕获信息的主要工具,在现代化事业中的重要性已被人们所认识。光电传感器的应用技术为信息科学的一个分支,俗称“电眼”。它是将传统光学技术与现代微电子技术以及计算机技术机密结合的纽带,是获取光信息或借助光提取其他信息的重要手段。现如今汽车成为大多数人必不可少的东西。经常开车的朋友们,应该都有过这样的苦恼每次开车到了单位或者小区大门口都要等门卫来开门或者等其按动电动门的开关,既费时间又费人力,如果巧妙地利用光电传感器就可以实现光控大门。所以借此次课程设计来设计一个光控大门,即把光敏电阻装在大门上并且在汽车灯光能照到的地方,把带动大门的电动机接在干簧管的电路中,那么夜间汽车开到大门前,灯光照射到光敏电阻时,干簧继电器就可以自动接通电动机电路,电动机就能带动大门打开。这样就解决了上述的问题。
目录 1、设计要求...............................................错误!未定义书签。 功能与用途 ............................................................................................. 错误!未定义书签。 指标要求 ................................................................................................. 错误!未定义书签。 2、光电传感器介绍及工作原理 ...............错误!未定义书签。 、光电传感器 ......................................................................................... 错误!未定义书签。 工作原理 ................................................................................................. 错误!未定义书签。 3、方案设计...............................................错误!未定义书签。 4、元件选择和电路设计 ...........................错误!未定义书签。 元件选择 ................................................................................................. 错误!未定义书签。 电路设计 ................................................................................................. 错误!未定义书签。 5、总结.......................................................错误!未定义书签。参考文献.....................................................错误!未定义书签。
光电探测技术实验报告
光电探测技术实验报告 班级:08050341X 学号:28 姓名:宫鑫
实验一光敏电阻特性实验 实验原理: 光敏电阻又称为光导管,是一种均质的半导体光电器件,其结构如图(1)所示。由于半导体在光照的作用下,电导率的变化只限于表面薄层,因此将掺杂的半导体薄膜沉积在绝缘体表面就制成了光敏电阻,不同材料制成的光敏电阻具有不同的光谱特性。光敏电阻采用梳状结构是由于在间距很近的电阻之间有可能采用大的灵敏面积,提高灵敏度。 实验所需部件: 稳压电源、光敏电阻、负载电阻(选配单元)、电压表、 各种光源、遮光罩、激光器、光照度计(由用户选配) 实验步骤: 1、测试光敏电阻的暗电阻、亮电阻、光电阻 观察光敏电阻的结构,用遮光罩将光敏电阻完全掩 盖,用万用表测得的电阻值为暗电阻 R暗,移开遮光罩,在环境光照下测得的光敏电阻的 阻值为亮电阻,暗电阻与亮电阻之差为光电阻,光 电阻越大,则灵敏度越高。 在光电器件模板的试件插座上接入另一光敏电阻, 试作性能比较分析。 2、光敏电阻的暗电流、亮电流、光电流 按照图(3)接线,电源可从+2~+8V间选用,分别在暗光和正常环境光照下测出输出电压V暗和V亮则暗电流L暗=V暗/R L,亮电流L亮=V亮/R L,亮电流与暗电流之差称为光电流,光电流越大则灵敏度越高。 分别测出两种光敏电阻的亮电流,并做性能比较。 图(2)几种光敏电阻的光谱特性 3、伏安特性: 光敏电阻两端所加的电压与光电流之间的关系。 按照图(3)分别测得偏压为2V、4V、6V、8V、10V、12V时的光电流,并尝试高照射光源的光强,测得给定偏压时光强度的提高与光电流增大的情况。将所测得的结果填入表格并作出V/I曲线。 注意事项: 实验时请注意不要超过光电阻的最大耗散功率P MAX, P MAX=LV。光源照射时灯胆及灯杯温度均很高,请勿用手触摸,以免烫伤。实验时各种不同波长的光源的获取也可以采用在仪器上的光源灯泡前加装各色滤色片的办法,同时也须考虑到环境光照的影响。
自动化传感器实验报告四--直流全桥的应用——电子秤实验
广东技术师范学院实验报告 学院:自动化专业:自动化班级:08自动化 成绩: 姓名:学号: 组 别: 组员: 实验地点:实验日期:指导教师签名: 实验二项目名称:直流全桥的应用——电子秤实验 一、实验目的 了解应变直流全桥的应用及电路的标定。 二、基本原理 电子秤实验原理与实验三相同,利用全桥测量原理,通过对电路调节使电路输出的电压值为重量对应值,电压量纲(V)改为重量量纲(g)即成为一台原始的电子秤。 三、需用器件和单元 传感器实验箱(二)中应变式传感器实验单元,应变式传感器实验模板、砝码、智能直流电压表(或虚拟直流电压表)、±15V电源、±5V电源。 四、实验内容与步骤 1.按实验一中的步骤2,将差动放大器调零,按图3-1全桥接线,打开直流稳压电源开关,调节电桥平衡电位器Rw1,使直流电压表显示为零。 2.将10只砝码全部置于传感器的托盘上,调节电位器Rw3(增益即满量程调节)使直流电压表显示为0.200V或-0.200V。 3.拿去托盘上的所有砝码,调节电位器Rw1(零位调节)使直流电压表显示为0.000V。 4.重复2、3步骤的标定过程,一直到精确为止,把电压量纲V改为重量量纲g,就可以称重,成为一台原始的电子秤。 5.把砝码依次放在托盘上,填入下表4-1。 表4-1电桥输出电压与加负载重量值 6. 误差:0% 非线性误差:0% 五、实验注意事项 1.不要在砝码盘上放置超过1kg的物体,否则容易损坏传感器。 2.电桥的电压为±5V,绝不可错接成±15V。
六、实验报告要求 1.记录实验数据,绘制传感器的特性曲线。 2.分析什么因素会导致电子秤的非线性误差增大,怎么消除,若要增加输出灵敏度,应采取哪些措施。 答:环境因素和实验器材的校正不准会导致非线性误差增大。通过多次校正,调节变位器可消除或减少误差。若要增加输出灵敏度可增加相形放大电路。
物理仿真实验报告1
物理仿真实验报告1
物理仿真实验报告 受迫振动 班级应物01 姓名赵锦文 学号10093020
一、实验简介 在本实验中,我们将研究弹簧重物振动系统的运动。在这里,振动中系统除受弹性力和阻尼力作用外,另外还受到一个作正弦变化的力的作用。这种运动是一类广泛的实际运动,即一个振动着的力学体系还受到一个作周期变化的力的作用时的运动的一种简化模型。如我们将会看到的,可以使这个体系按照与施加力相同的频率振动,共振幅既取决于力的大小也取决于力的频率。当力的频率接近体系的固有振动频率时,“受迫振动”的振幅可以变得非常大,这种现象称为共振。共振现象是重要的,它普遍地存在于自然界,工程技术和物理学各领域中.共振概念具有广泛的应用,根据具体问题中共振是“利”还是“害”,再相应地进行趋利避害的处理。 两个相互耦合的简谐振子称为耦合振子,耦合振子乃是晶体中原子在其平衡位置附近振动的理想模型。 本实验目的在于研究阻尼振动和受迫振动的特性,要求学生测量弹簧重物振动系统的阻尼常数,共振频率。 二、实验原理 1.受迫振动 砝码和挂钩 弹簧 弹簧 振荡器 图13.1 受迫振动 质量M 的重物按图1放置在两个弹簧中间。静止平衡时,重物收到的合外力为0。当重物被偏离平衡位置时,系统开始振动。由于阻尼衰减(例如摩擦力),最终系统会停止振动。振动频率较低时,可以近似认为阻力与振动频率成线性关系。作用在重物上的合力: x M x Kx x x k x k F 21=--=---=ββ 其中k1, k2是弹簧的倔强系数。
K = k1+ k2是系统的等效倔强系数。 x 是重物偏离平衡位置的距离, β 是阻尼系数。 因此重物的运动方程可表示为: 22 0=++x x x ωγ 其中 γβ=M and ω02 =K M 。 在欠阻尼状态时(ωγ0>),方程解为: ) cos(22 0 φγωγ+-=-t Ae x t A, φ 由系统初始态决定。方程的解是一个幅度衰减的谐振动,如图2所示。 T 图13.2 衰减振动 振动频率是: f T = =-11202 2π ωγ (13.1) 如果重物下面的弹簧1k 由一个幅度为a 的振荡器驱动,那么这个弹簧作用于重物的力是) cos (1x t a k -ω。此时重物的运动方程为: M t a k x x x cos 212 0ωωγ= ++ . 方程的稳态解为: ) cos(4)(2 2 2 22 1θωω γωω-+-= t M a k x (13.2) 其中 )2(tan 2 201 ωωγω θ-=-。图13.3显示振动的幅度与频率的关系。
传感器测速实验报告(第一组)
传感器测速实验报告 院系: 班级: 、 小组: 组员: 日期:2013年4月20日
实验二十霍尔转速传感器测速实验 一、实验目的 了解霍尔转速传感器的应用。 二、基本原理 利用霍尔效应表达式:U H=K H IB,当被测圆盘上装有N只磁性体时,圆盘每转一周磁场就变化N次。每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。 本实验采用3144E开关型霍尔传感器,当转盘上的磁钢转到传感器正下方时,传感器输出低电平,反之输出高电平 三、需用器件与单元 霍尔转速传感器、直流电源+5V,转动源2~24V、转动源电源、转速测量部分。 四、实验步骤 1、根据下图所示,将霍尔转速传感器装于转动源的传感器调节支架上,调节探头对准转盘内的磁钢。 图9-1 霍尔转速传感器安装示意图 2、将+15V直流电源加于霍尔转速器的电源输入端,红(+)、黑( ),不能接错。 3、将霍尔传感器的输出端插入数显单元F,用来测它的转速。 4、将转速调解中的转速电源引到转动源的电源插孔。 5、将数显表上的转速/频率表波段开关拨到转速档,此时数显表指示电机的转速。 6、调节电压使转速变化,观察数显表转速显示的变化,并记录此刻的转速值。
五、实验结果分析与处理 1、记录频率计输出频率数值如下表所示: 电压(V) 4 5 8 10 15 20 转速(转/分)0 544 930 1245 1810 2264 由以上数据可得:电压的值越大,电机的转速就越快。 六、思考题 1、利用霍尔元件测转速,在测量上是否有所限制? 答:有,测量速度不能过慢,因为磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误。 2、本实验装置上用了十二只磁钢,能否只用一只磁钢? 答:如果霍尔是单极的,可以只用一只磁钢,但可靠性和精度会差一些;如果霍尔 是双极的,那么必须要有一组分别为n/s极的磁钢去开启关断它,那么至少要两只磁钢。
传感器实训报告
教学做一体化课程设计报告题目智能小车 课程名称传感器与自动检测技术 系部名称信息工程系 专业应用电子技术 班级10应用电子技术班 学生姓名何洁 学号 2010407101 指导教师张存吉 课程设计时间 2012年6月25日——6月29日 电子信息教研室制
摘要 本系统以AT89C51为核心,综合温湿度传感器、霍尔传感器、光电传感器、接近开关传感器、烟雾传感器等,设计的智能小车系统能够实现显示现场的温湿度,实时显示小车的速度,智能小车按照预定的轨迹运行,终点精确停车功能。具有运行环境烟雾探测功能以及其他扩展功能(避障、人体探测、光线检测等)。 实验目的: 将课本上所学习到的理论知识在实践中融会贯通、相互结合。提高动手能力,将传感器真正运用到实践中并直观的表达出来。同时也了解传感器的功能以及特点。 实验内容: 1、通过学习传感器的模块,将其运用到智能小车中 2、将所需的元件了解其中的原理 3、智能小车制作的过程中遇到的问题以及解决方法 4、程序的书写 实验过程: 一、温度传感器的制作 在进行温度传感器模板的制作时,首先需要了解温度传感器的一些原理与特性。在学习的过程中,我明白了温度传感器的分类,按照用途分可以分为基准温度计和工业温度计;按照工作原理分可以分为膨胀式、电阻式、热电式等等;按照输出方式分可
以分为自发电型、非电测型等。在了解了基础的知识后,就要需要了解运用在小车上的温度传感器。经过分析我采用了型号为SHT10这一个温湿度传感器,它具有极高的可靠性与稳定性。 最后我利用protel99软件,将温度传感器的原理图绘出。如下图: 在确定原理图正确连接后,封装元件并导入PCB制版,PCB最后效果图如下:
光电传感器介绍
光电式传感器 1.概述 光电传感器是采用光电元件作为检测元件的传感器。它首先把被测量的变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号。光电传感器一般由光源、光学通路和光电元件三部分组成。光电检测方法具有精度高、反应快、非接触等优点,而且可测参数多,传感器的结构简单,形式灵活多样,因此,光电式传感器在检测和控制中应用非常广泛。光电传感器是各种光电检测系统中实现光电转换的关键元件,它是把光信号(红外、可见及紫外光辐射)转变成为电信号的器件。 光电式传感器是以光电器件作为转换元件的传感器。它可用于检测直接引起光量变化的非电量,如光强、光照度、辐射测温、气体成分分析等;也可用来检测能转换成光量变化的其他非电量,如零件直径、表面粗糙度、应变、位移、振动、速度、加速度,以及物体的形状、工作状态的识别等。光电式传感器具有非接触、响应快、性能可靠等特点,因此在工业自动化装置和机器人中获得广泛应用。近年来,新的光电器件不断涌现,特别是CCD图像传感器的诞生,为光电传感器的进一步应用开创了新的一页。 2.物理特性 2.1外光电效应 2.1.1光子假设 1887年,赫兹发现光电效应,爱因斯坦第一个成功解释光电效应。爱因斯坦根据普朗克量子假说而进一步提出的光量子,即光子概念,对光电效应研究做出了决定性的贡献。爱因斯坦光子假说的核心思想是:表面上看起来连续的光波是量子化的。单色光由大量不连续的光子组成。若单色光频率为n,那么每个 光子的能量为E=hv, 动量为。 由爱因斯坦光子假说发展成现代光子论(photon theory)的两个基本点是:
(1) 光是由一颗一颗的光子组成的光子流。每个光子的能量为E = hv,动量 为。由N个光子组成的光子流,能量为N hv。 (2) 光与物质相互作用,即是每个光子与物质中的微观粒子相互作用。 根据能量守恒定律,约束得最不紧的电子在离开金属面时具有最大的初动 能,所以对于电子应有: 2.2 内光电效应 光电传感器通常是指能敏感到由紫外线到红外线光的光能量,并能将光能转化成电信号的器件。其工作原理是基于一些物质的光电效应。 光电效应:当具有一定能量E的光子投射到某些物质的表面时,具有辐射能量的微粒将透过受光的表面层,赋予这些物质的电子以附加能量,或者改变物质的电阻大小,或者使其产生电动势,导致与其相连接的闭合回路中电流的变化,从而实现了光—电转换过程。在光线作用下能使物体电阻率改变的称为内光电效应。属于内光电效应的光电转换元件有光敏电阻以及由光敏电阻制成的光导管等。 2.2.1光电导效应 光照变化引起半导体材料电导变化的现象称光电导效应(又称为光电效应、光敏效应),即光电导效应是光照射到某些物体上后,引起其电性能变化的一类光致电改变现象的总称。当光照射到半导体材料时,材料吸收光子的能量,使非传导态电子变为传导态电子,引起载流子浓度增大,因而导致材料电导率增大。在光线作用下,对于半导体材料吸收了入射光子能量,若光子能量大于或等于半导体材料的禁带宽度,就激发出电子-空穴对,使载流子浓度增加,半导体的导电性增加,阻值减低,这种现象称为光电导效应。光敏电阻就是基于这种效应的光电器件。
西安交大物理仿真实验实验报告
西安交通大学实验报告 第 1 页(共10 页)课程:_____大学物理实验____ 实验日期 : 2014 年 11月 30日 专业班号______组别__无___ 交报告日期: 2012 年 12 月 4 日 姓名___ 学号______ 报告退发:(订正、重做) 同组者____________________________ 教师审批签字: 实验名称:超声波测声速 一、实验目的: 1。了解超声波的产生、发射、和接收方法; 2.用驻波法、相位比较法测量声速。 二、实验仪器: SV—DH系列声速测试仪,示波器,声速测试仪信号源. 三、实验原理: 由波动理论可知,波速与波长、频率有如下关系:v = f λ,只要知道频率 和波长就可以求出波速.本实验通过低频信号发生器控制换能器,信号发生器的 输出频率就是声波频率。声波的波长用驻波法(共振干涉法)和行波法(相位比 较法)测量.下图是超声波测声速实验装置图.
1。驻波法测波长 由声源发出的平面波经前方的平面反射后,入射波与发射波叠加,它们波动方程分别是: 叠加后合成波为: 振幅最大的各点称为波腹,其对应位置: 振幅最小的各点称为波节,其对应位置: 因此只要测得相邻两波腹(或波节)的位置Xn、Xn—1即可得波长. 2。相位比较法测波长
从换能器S1发出的超声波到达接收器S2,所以在同一时刻S1与S2处的波有一相位差:。因为x改变一个波长时,相位差就改变2π。利用李萨如图形就可以测得超声波的波长. 四、实验内容 1.接线 2.调整仪器 (1)示波器的使用与调整 使用示波器时候,请先调整好示波器的聚焦.然后鼠标单击示波器的输入信号的接口,把信号输入示波器.接着调节通道1,2的幅度微调,扫描信号的时基微调。最后选择合适的垂直方式选择开关,触发源选择开关,内触发源选择开关,Auto-Norm-X—Y开关,在示波器上显示出需要观察的信号波形。输入信道的信号是由实验线路的连接决定的。 (2)信号发生器的调整 根据实验的要求调整信号发生器,产生频率大概在35KHz左右,幅度为5V 的一个正弦信号。由于本实验测声速的方法需要通过换能器(压电陶瓷)共振把电信号转为声信号,然后再转为电信号进行的,所以在开始测量前需要调节信号的频率为换能器的共振频率。在寻找共振频率时,通过调节信号发生器的微调旋钮,观察示波器上信号幅度是否为最大来逐步寻找的。 (3)超声速测定仪的使用 在超声速测定仪中,左边的换能器是固定的,右边的换能器是与游标卡尺的滑动部分连接在一起的。这样,左右换能器间的距离就可以通过游标卡尺来测量出来,在上图的下半部分是一个放大的游标卡尺的读数图. 3.实验内容 寻找到超声波的频率(就是换能器的共振频率)后,只要测量到信号的波长就可以求得声速.我们采用驻波法和相位比较法来测量信号波长: (1)驻波法 信号发生器产生的信号通过超声速测定仪后,会在两个换能器件之间产生驻波。改变换能器之间的距离(移动右边的换能器)时,在接收端(把声信号转为电信号的换能器)的信号振幅会相应改变。当换能器之间的距离为信号波长的一
智能循迹小车实验报告
简单电子系统设计报告 ---------智能循迹小车 学号201009130102 年级10 学院理学院 专业电子信息科学与技术 姓名马洪岳 指导教师刘怀强
摘要 本实验完成采用红外反射式传感器的自寻迹小车的设计与实现。采用与白色地面色差很大的黑色路线引导小车按照既定路线前进,在意外偏离引导线的情况下自动回位。 本设计采用单片机STC89C51作为小车检测、控制、时间显示核心,以实验室给定的车架为车体,两直流机为主驱动,附加相应的电源电路下载电路,显示电路构成整体电路。自动寻迹的功能采用红外传感器,通过检测高低电平将信号送给单片机,由单片机通过控制驱动芯片L298N驱动电动小车的电机,实现小车的动作。 关键词:STC89C51单片机;L298N;红外传感器;寻迹 一、设计目的 通过设计进一步掌握51单片机的应用,特别是在控制系统中的应用。进一步学习51单片机在系统中的控制功能,能够合理设计单片机的外围电路,并使之与单片机构成整个系统。 二、设计要求 该智能车采用红外传感器对赛道进行道路检测,单片机根据采集到的信号的不同状态判断小车当前状态,通过电机驱动芯片L298N发出控制命令,控制电机的工作状态以实现对小车姿态的控制,绕跑到行驶一周。 三、软硬件设计 硬件电路的设计 1、最小系统:
小车采用atmel公司的AT89C52单片机作为控制芯片,图1是其最小系统电路。主要包括:时钟电路、电源电路、复位电路。其中各个部分的功能如下: (1)、电源电路:给单片机提供5V电源。 (2)、复位电路:在电压达到正常值时给单片机一个复位信号。 图1 单片机最小系统原理图 2、电源电路设计: 模型车通过自身系统,采集赛道信息,获取自身速度信息,加以处理,由芯片给出指令控制其前进转向等动作,各部分都需要由电路支持,电源管理尤为重要。在本设计中,51单片机使用5V电源,电机及舵机使用5V电源。考虑到电源为电池组,额定电压为4.5V,实际充满电后电压则为4-4.5V,所以单片机及传感器模块采用最小系统模块稳压后的5V电源供电,舵机及电机直接由电池供电。 3、传感器电路:
大物仿真实验实验报告
学院数统学院专业信计21 姓名倪皓洋学号 2120602015 实验名称:刚体的转动惯量 一实验简介: 在研究摆的中心升降问题时,惠更斯发现了物体系的重心与后来欧勒称之为转动惯量的量。转动惯量是表征刚体转动惯性大小的物理量,它与刚体的质量、质量相对于转轴的分布有关。 二实验目的: 1.用实验方法验证转动惯量,并求转动惯量。 2.观察转动惯量与质量的分布关系。 3.学习作图的曲线改直法,并由作图法处理实验数据。 三实验原理: 1. 刚体的转动定律 具有确定转轴的刚体,在外力矩作用下,将获得较加速度β,其值与外力矩成正比,与刚体的转动惯量成反比即有刚体的转动定律: M=Iβ 利用转动定律,通过实验的方法,可求得难以用计算方法得到的转动惯量。 2.应用转动定律求转动惯量 如图所示,待测刚体由塔轮,伸杆及杆上的配重物组成。刚体将在砝码的拖动下绕竖直轴转动 设细线不可伸长,砝码受到重力和细线的张力作用,从静止开始以加速度a下落,其运动方程为mg-t=ma,在t时间内下落的高度为h=at2/2。刚体收到张力的力矩为T r和轴摩擦力力矩M f。由转动定律可得到刚体的转动运动方程:T r--M f=I β。绳与塔轮间无相对滑动时有a =rβ,上述四个方程得到: m(g - a)r - Mf = 2hI/rt2 (2) M f与张力矩相比可以忽略,砝码质量m比刚体的质量小的多时有a< 的方法求得转动惯量I。 3.验证转动定律,求转动惯量 从(3)出发,考虑用以下两种方法: A.作m – 1/t2图法:伸杆上配重物位置不变,即选定一个刚体,取固定力臂r 和砝码下落高度h,(3)式变为: M = K1/ t2 (4) 式中K1 =2hI/ gr2为常量。上式表明:所用砝码的质量与下落时间t的平方成反比。实验中选用一系列的砝码质量,可测得一组m与1/t2的数据,将其在直角坐标系上作图,应是直线。即若所作的图是直线,便验证了转动定律。 从m – 1/t2图中测得斜率K1,并用已知的h、r、g值,由K1 =2hI/gr2求得刚体的I。 B.作r – 1/t图法:配重物的位置不变,即选定一个刚体,取砝码m和下落高度h为固定值。将式(3)写为: r = K2/ t (5) 式中K2 = (2hI/ mg)1/2是常量。上式表明r与1/t成正比关系。实验中换用不同的塔轮半径r,测得同一质量的砝码下落时间t,用所得一组数据作r-1/t图,应是直线。即若所作图是直线,便验证了转动定律。 从r-1/t图上测得斜率,并用已知的m、h、g值,由K2 = (2hI/ mg)1/2求出刚体的I。 四实验仪器: 刚体转动仪,滑轮,秒表,砝码 其中刚体转动仪包括: A.、塔轮,由五个不同半径的圆盘组成。上面绕有挂小砝码的细线,由它对刚体施加外力矩。 B、对称形的细长伸杆,上有圆柱形配重物,调节其在杆上位置即可改变转动惯量。与A和配重物构成一个刚体。 C.、底座调节螺钉,用于调节底座水平,使转动轴垂直于水平面。 此外还有转向定滑轮,起始点标志,滑轮高度调节螺钉等部分 。 双击刚体转动仪底座下方的旋钮,会弹出底座放大窗口和底座调节窗口,在底座调节窗口的旋钮上点击鼠标左、右键,可以调整底座水平。在底座放大窗口上单击右键可以转换视角。(如下图) 光电式传感器测转速实验报告 ——传感器与检测技术 班级:1321202 专业:测控技术与仪器学号:201320120209 姓名:林建宇 1.实验目的: 1)掌握利用光电传感器进行非接触式转速测量的方法; 2)掌握测量和显示电路的设计方法; 3)了解光电式传感器以及示波器的使用方法。 2.实验基本原理: 光电式转速传感器有反射型和透射型二种,本实验装置是透射型的(光电断续器也称光耦),传感器端部二内侧分别装有发光管和光电管,发光管发出的光源透过转盘上通孔后由光电管接收转换成电信号,由于转盘上有均匀间隔的6个孔,转动时将获得与转速有关的脉冲数,脉冲经处理由频率表显示f,即可得到转速n=10f。实验原理框图如下图所示。 光耦测转速实验原理框图 3.需用器件与单元: 主机箱中的直流稳压电源、示波器、电压表、频率\转速表;转动源、光电转速传感器—光电断续器(已装在转动源上)。 4.实验步骤: (1)、按图1所示接线,并且接上示波器,将直流稳压电源调到10V档。 图1、光电传感器测速实验接线示意图 (2)、检查接线无误后,合上主机箱电源开关,调节电机控制旋钮,F/V表以及示波器就会显示相应的频率f,计算转速为n=10f。实验完毕,关闭主、副电源。 5、实验结论与总结 组数 1 2 3 4 5 6 仪器频率108 133 166 186 232 373 示波器频率106.083 134.913 167.949 188.170 232.125 373.892 转速1080 1330 1660 1860 2320 3730 (注:转速单位为转/分钟) 平均误差?△=∑△i/6 (i=6) ?△≈0.855 σ≈1.070 总结:通过计算可知标准差较小,仪器准确率较高。由仪器和示波器所测的两种频率,其中示波器所显示的为标准值。根据上面实验观察到的波形,由于孔所占比例小,所以方波的高电平比低电平要宽。光电式传感器测转速方法简单,易于实现。 物理仿真实验氢氘光谱拍摄实验报告范本 一、实验目的 1.掌握氢氘光谱各谱线系的规律,即计算氢氘里德伯常数RH,RD的方法。 2.掌握获得和测量氢氘光谱的实验方法。 3.学习光栅摄谱仪的运行机理,并学会正确使用。 二、实验仪器及其使用方法 WPS-1自动控制箱,光源:铁电极。电弧发生器,光源:氢氘放电管。中间光阑,哈德曼光阑,摄谱窗口。 平面光栅摄谱仪是以平面衍射光栅作为色散元件的光谱仪器。它的光学系统用Ebert-Fastie装置(垂直对称式装置),其光学系统如图2所示。由光源B(铁电极、氢氘放电管)发射的光,经过消色差的三透镜照明系统L均匀照明狭缝S,再经反射镜P折向球面反射镜M下方的准光镜O1上,经O1反射,以平行光束射到光栅G上,经光栅衍射后,不同方向的单色光束射到球面反射镜的中央窗口暗箱物镜O2处,最后按波长排列聚焦于感光板F上,旋转光栅G,改变光栅的入射角,便可改变拍摄谱线的波段范围和光谱级次。这种装置的入射狭缝S和光谱感光板是垂直平面内对称于光栅G放置的,由于光路结构的对称性,彗差和像散可以矫正到理想的程度,使得在较长谱面范围内,谱线清晰、均匀。同时由于使用球面镜M同时作为准直物镜和摄谱物镜,因此不产生色差,且谱面平直。使用摄谱仪做光谱实验时必须注意以下事项: (1)摄谱仪为精密仪器,使用时要注意爱护。尤其是狭缝,非经教师允许,不可以随意调节各旋钮,手柄均应轻调慢调,旋到头时不能再继续用力,不要触及仪器的各光学表面; (2)燃电弧时,注意操作安全。电弧利用高频高压,点燃后不要用手触及仪器外壳;更换电极时要切断高压电,用绝缘性能好的钳子或手套来更换;电弧有强紫外线辐射,使用时要戴防护眼镜; (3)铁弧电极上不能有氧化物,应经常磨光,呈圆锥形;调节两电极头之间的距离,注意电极头成像不要进入中间光阑。 三、实验原理 巴尔末总结出来的可见光区氢光谱的规律为: (n = 3,4,5 ……) 式中的B=364.56nm。此规律可改写为: 式中的为波数,为氢的里德伯常数(109 678cm)。 根据玻尔理论或量子力学中的相关理论,可得出对氢及类氢离子的光谱规律为: 其中,和为整数,z为该元素的核电荷数,相应元素的里德伯常数为: 其中,m和e为电子的质量和电荷,c是真空中的光速,h为普朗克常数,M为原子核的质量。显然,随元素的不同R应略有不同,但当认为M→∞时,便可得到里德伯常量为: 这与玻尔原子理论(即电子绕不动的核运动)所推出的R值完全一样。现在公认的传感器设计实验―光电测转速
【实验报告】物理仿真实验氢氘光谱拍摄实验报告范本