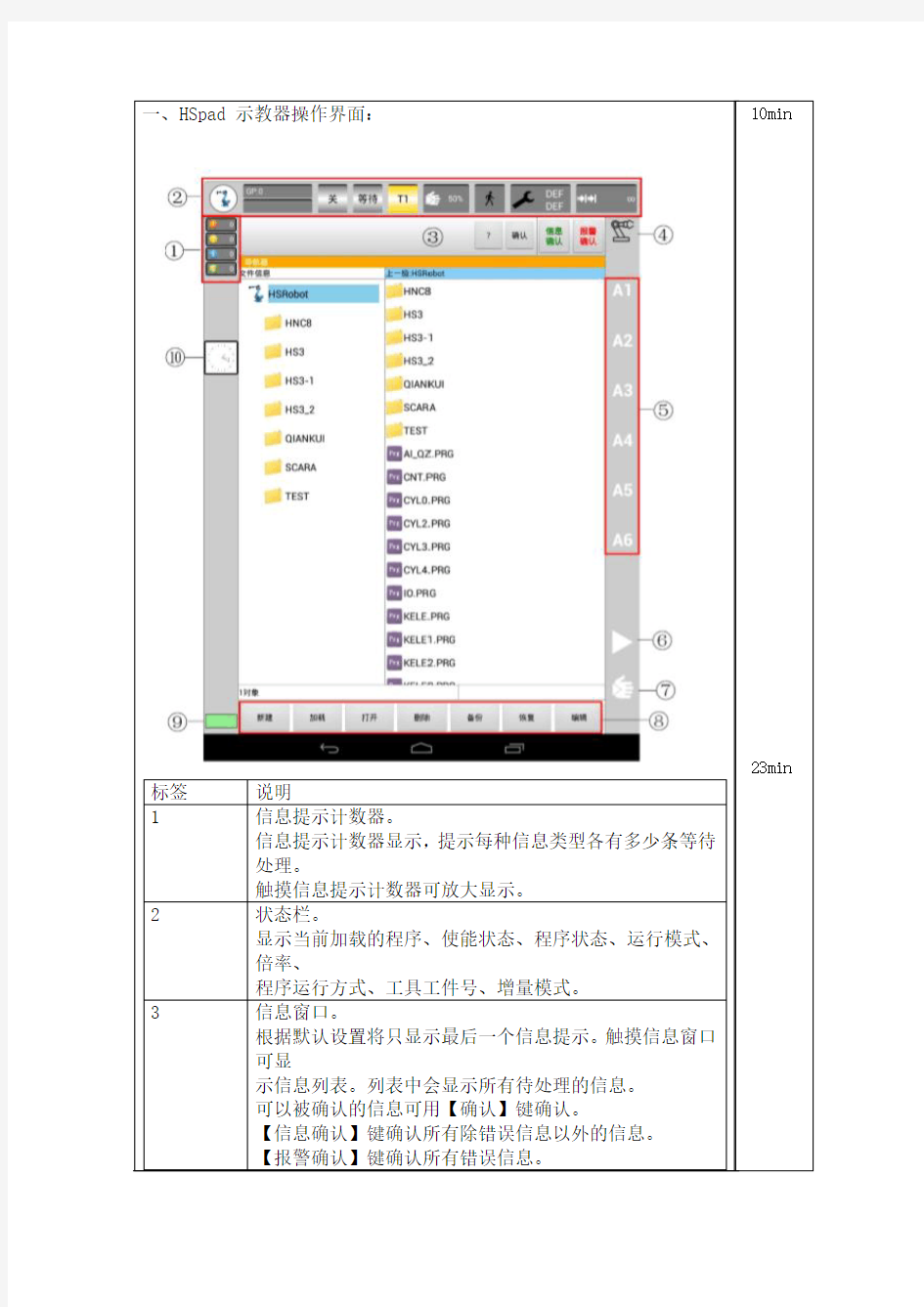
界面。 4.3先选择需进行编辑的程序TTT6,再按下“F1”键进入(程序PROGRAM)编辑界面,画面显示出选择的程序。按右侧的“↑”、“↓”键移动光标选择的程序段37(若程序中有中文注释时会以日文方式显示,对程序执行无影响)。 4.3按“F1”键进入编辑界面对程序段进行修改,此时光标在“3”字处闪,表示此字符可进行修改。按“←”和“→”键可移动光标,连续按“→”键10次后光标移动到“0”字(新)机器人示教器操作说明
一.示教操作盘面板介绍 示教操作盘是主管应用工具软件与用户之间的接口的操作装置。示教操作盘经由电缆与控制装置内部的主CPU印刷电路板和机器人控制印刷电路板连接。 示教操作盘在进行如下操作时使用。 ●机器人的JOG进给
●程序创建 ●程序的测试执行 ●操作执行 ●状态确认 示教操作盘由如下构件构成。 ●横向40字符、纵向16行的液晶画面显示屏 ●61个键控开关 ●示教操作盘有效开关 ●Deadman开关 ●急停按钮 1.示教操作盘有效开关 在盘左上角,如右图所示: 其将示教操作盘置于有效状态。示教操作盘处在无效状态下,不能进行JOG进给、程序创建和测试执行等操作。 2.Deadman开关 在盘背面,如右图所示两黄色键: 示教操作盘处在有效状态下松开此开关时,机器人 将进入急停状态。
3.急停按钮 在盘右上角,如右图所示红色键: 不管示教操作盘有效开关的状态如何,都会使 执行中的程序停止,机器人伺服电源被切断,使 得机器人进入急停状态。 示教操作盘的键控开关,由如下开关构成。 ●与菜单相关的键控开关 ●与JOG相关的键控开关 ●与执行相关的键控开关 ●与编辑相关的键控开关 1.与菜单相关的键控开关: 1.)、、、、 功能( F )键,用来选择液晶画面最下行的功能键菜单。2.) 翻页键将功能键菜单切换到下一页。
3.)、 MENU(画面选择)键,按下,显示出画面菜单。 FCTN(辅助)键用来显示辅助菜单。 4.)、、、、、、、、SELECT(一览)键用来显示程序一览画面。 EDIT(编辑)键用来显示程序编辑画面。 DATA(数据)键用来显示寄存器等数据画面。 OTF键用来显示焊接微调整画面。 STATUS(状态显示)键用来显示状态画面。 I/O(输入/输出)键用来显示I/O画面。 POSN(位置显示)键用来显示当前位置画面。 DISP单独按下的情况下,移动操作对象画面。在与SHIFT键同时按下的情况下,分割画面(1个画面、2个画面、3个画面、状态/1 个画面)。 DIAG/HELP单独按下的情况下,移动到提示画面。在与SHIFT键同时按下的情况下, 移动到报警画面。 2.与JOG相关的键控开关 1.) SHIFT键与其他按键同时按下时,可以进行JOG进给、位置数据的示教、程序的启动等特定功能。左右的SHIFT键功能相同。
ABB 机器人简单操作指南
ABB机器人简单操作指南 1 机器人主要由以下两部分组成 控制柜机械手控制柜和机械手之间由两条电缆连接 可以用示教器或位于控制柜上的操作盘来控制机械手,见下图 2 机械手 下图显示了机械手上不同的轴的可移动的方向
3 控制柜 下图显示了控制柜的主要部分 示教器 操作盘主开关 驱动磁盘 4 操作盘 下图描述了操作盘的功能 电机开按钮及指示灯操作模式选择开关 急停,如果按下请拉出来工作时间计数器,显示机械手 的工作时间电机开 在电机开状态,机器人的电机被激活,Motors On按钮保持常亮. 常亮准备执行程序 快速闪烁(4Hz) 机器人没有校准或选择计数器没有更新.电机已经打开. 慢速闪烁(1Hz)一个保护停机被激活,电机关闭.
工作模式自动(生产模式) 在这个模式下,当运行准备就绪后,不能用控制杆手动移动机器人 工作模式手动减速运行(程序模式) 在机器人工作区域里面对其编程时候.也用于在电机关状态设置机器人. 工作模式手动全速(选择,测试模式) 用来在全速情况下运行程序 急停 当按下按钮时,无论机器人处于什么状态都立即停止.要重新启动需将按钮恢复工作时间计数器 显示机械手工作的时间 5 示教器 见下图 控制运行 使能设备 显示屏 控制杆 急停按钮手动慢速运行:打开手动慢速运行窗口 编程: 打开编程及测试窗口
输入/输出:打开输入输出窗口,用来手动操作输入输出信号 其它:打开其它窗口如系统参数,维护,生产及文件管理窗口. 停止: 停止程序执行 对比度: 调节显示屏的对比度 菜单键: 按下后显示包含各种命令的菜单 功能键: 按下后直接选择各种命令 动作单元: 按下后手动慢速运行机器人或其它机械元件 动作形式: 按下后选择怎样手动慢速运行机器人,再定位或直线 动作形式: 轴-轴移动. 1=轴1-3, 2=轴4-6 增加: 增加手动慢速运行开/关 列表: 按下后将指针从一个窗口移到另一个窗口(通常由双画线分开) 返回/翻页: 按下翻页或返回上级菜单 删除: 删除选中的参数 确认: 按下输入数据
工业机器人控制的功能
工业机器人控制的功能、组成和分类 1. 对机器人控制系统的一般要求 机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,其基本功能如下: ·记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。·示教功能:离线编程,在线示教,间接示教。在线示教包括示教盒和导引示教两种。 ·与外围设备联系功能:输入和输出接口、通信接口、网络接口、同步接口。 ·坐标设置功能:有关节、绝对、工具、用户自定义四种坐标系。 ·人机接口:示教盒、操作面板、显示屏。 ·传感器接口:位置检测、视觉、触觉、力觉等。 ·位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。 ·故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障自诊断。 2.机器人控制系统的组成(图1) (1)控制计算机控制系统的调度指挥机构。一般为微型机、微处理器有32位、64位等,如奔腾系列CPU以及其他类型CPU。 (2)示教盒示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的CPU以及存储单元,与主计算机之间以串行通信方式实现信息交互。 (3)操作面板由各种操作按键、状态指示灯构成,只完成基本功能操作。 (4)硬盘和软盘存储存储机器人工作程序的外围存储器。 (5)数字和模拟量输入输出各种状态和控制命令的输入或输出。 (6)打印机接口记录需要输出的各种信息。 (7)传感器接口用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。 (8)轴控制器完成机器人各关节位置、速度和加速度控制。 (9)辅助设备控制用于和机器人配合的辅助设备控制,如手爪变位器等。 (10)通信接口实现机器人和其他设备的信息交换,一般有串行接口、并行接口等。(11)网络接口 1)Ethernet接口:可通过以太网实现数台或单台机器人的直接PC通信,数据传输速率高达10Mbit/s,可直接在PC上用windows库函数进行应用程序编程之后,支持TCP/IP通信协议,通过Ethernet接口将数据及程序装入各个机器人控制器中。 2)Fieldbus接口:支持多种流行的现场总线规格,如Device net、AB Remote I/O、Interbus-s、profibus-DP、M-NET等。
工业机器人技术应用(教案)4-初识工业机器人的作业示教
第四章初识工业机器人的作业示教 4.1 工业机器人示教的主要内容 4.1.1 运动轨迹 4.1.2 作业条件 4.1.3 作业顺序 学习目标导入案例课堂认知扩展与提高本章小结思考练习 4.2 工业机器人的简单试教学与再现 4.2.1 在线示教及其特点 4.2.2 在线示教的基本步骤其特点 4.3 工业机器人的离线编程技术 4.3.1 离线编程及其特点 4.3.2 离线编程系统的软件架构 4.3.3 离线编程的基本步骤 课前回顾 如何选择机器人坐标系和运动轴? 机器人点动与连续移动有何区别,分别适合在哪些场合运用? 学习目标 认知目标 掌握工业机器人示教的主要内容 熟悉机器人在线示教的特点与操作流程 熟悉机器人离线编程的特点与操作流程 掌握机器人示教 - 再现工作原理 能力目标 能够进行工业机器人简单作业在线示教与再现 能够进行工业机器人离线作业示教与再现 导入案例 机器人职业前景分析 对于机器人企业来说,他们需要的高端人才,至少应熟悉编程语言和仿真设计,以及神经网络、模糊控制等常用控制算法,能达到指导员工的程度。在此基础上,能依据实际情况自主研究算法。此外,最好还能主导大型机电一体化设备的研发,具备一定的管理能力。而其余调试,操作员工的要求相应递减。跟据职能划分,大概可分为四个工种: 1. 工程师助手,主要责任是协助工程师绘制机械图样、电气图样、简单工装夹具设计、制作工艺卡片、指导工人按照装配图进行组装;2. 机器人生产线试产员与操作员;3. 机器人总装与调试者;4.高端维修或售后服务人员。 课堂认知 4.1 工业机器人示教的主要内容
目前,企业引入的以第一代工业机器人为主,其基本工作原理是“示教 - 再现”。 “示教”也称导引,即由操作者直接或间接导引机器人,一步步按实际作业要求告知机器人应该完成的动作和作业的具体内容,机器人在导引过程中以程序的形式将其记忆下来,并存储在机器人控制装置内;“再现”则是通过存储内容的回放,机器人就能在一定精度范围内按照程序展现所示教的动作和赋予的作业内容程序是把机器人的作业内容用机器人语言加以描述的文件,用于保存示教操作中产生的示教数据和机器人指令。 机器人完成作业所需的信息包括运动轨迹、作业条件和作业顺序。 4.1.1 运动轨迹 运动轨迹是机器人为完成某一作业,工具中心点( TCP )所掠过的路径,是机器示教的重点。从运动方式上看,工业机器人具有点到点( PTP )运动和连续路径( CP )运动2 种形式。按运动路径种类区分,工业机器人具有直线和圆弧 2 种动作类型。 示教时,直线轨迹示教 2 个程序点(直线起始点和直线结束点);圆弧轨迹示教3 个程序点(圆弧起始点、圆弧中间点和圆弧结束点)。在具体操作过程中,通常 PTP 示教各段运动轨迹端点,而 CP 运动由机器人控制系统的路径规划模块经插补运算产生。 机器人运动轨迹 机器人运动轨迹的示教主要是确认程序点的属性。每个程序点主要包含: 位置坐标:描述机器人 TCP 的 6 个自由度( 3 个平动自由度和 3 个转动自由度)。 插补方式:机器人再现时,从前一程序点移动到当前程序点的动作类型。 再现速度:机器人再现时,从前一程序点移动到当前程序点的速度。 空走点:指从当前程序点移动到下一程序点的整个过程不需要实施作业,用于示教除作业开始点和作业中间点之外的程序点。 作业点:指从当前程序点移动到下一程序点的整个过程需要实施作业,用于作业开始点和作业中间点。 空走点和作业点决定从当前程序点移动到下一程序点是否实施作业。 提示作业区间的再现速度一般按作业参数中指定的速度移动,
FANUC机器人示教器的简单认识.
FANUC机器人示教器的简单认识 示教器是主管应用工具软件与用户(机器人)之间的接口操作装置。示教器通过电缆与控制柜连接。我们在机器人的点动进给、程序创建、程序的测试执行、操作执行和姿态确认等等操作时都会使用示教器。 一、示教器开关 示教器具有如下开关: 开关功能 示教器有效开关 将示教器置于有效状态。示教器无效时,点动进给、程序创建、测试执行无法进行。 安全开关 三位置安全开关,按到中间位置成为有效。有效时,从安全开关松开手、或者用力将其握住时,机器人就会停止。 急停按钮 不管示教器有效开关的状态如何,机器人都会停止(停止方法的详情,请参照“为了安全使用”的“机器人的停止方法”)。 表一:示教器开关
二、示教器按键 示教器按键由与菜单相关的按键、与点动相关的按键、与执行相关的按键、与编辑相关的按键和其他按键组成。
(1)与应用相关的按钮 按键功能 功能键(F),用来选择画面最下行的功 能键菜单。 NEXT(翻页)键将功能键菜单切换到 下一页。
按下[MENU](菜单)键,显示出画面 菜单。 FCTN(辅助)键用来显示辅助菜单。 SELECT(一览)键用来显示程序一览 画面。 EDIT(编辑)键用来显示程序编辑界 面。 DATA(数据)键用来显示数据画面。 POSN(位置显示)键用来显示当前位 置画面。 单独按下的情况下,移动操作对象画 面。 在与SHIFT键同时按下的情况下,分 割屏幕(单屏、双屏、三屏)。 单独按下的情况下,移动到提示画面。 在于SHIFT键同时按下的情况下,移 动到报警界面。 单独按下时,按照G1→G1S→G2→G 2S→…的顺序,依次切换组、副组。 按住GROUP(组切换)键的同时,按 住希望变更的组号码的数字键,即可变更为 该组。 HANDLING TOOL(搬运工具)用示 教器上的应用专用按键。应用专用按键根据 应用而有所不同。 注释: GROUP键,只有在订购了多动作和附加轴控制的软件选项,追加并启动附加轴和独立附加轴的情况下才有效。
机器人示教器操作说明
一.示教操作盘面板介绍 示教操作盘就是主管应用工具软件与用户之间的接口的操作装置。示教操作盘经由电缆与控制装置内部的主CPU印刷电路板与机器人控制印刷电路板连接。 示教操作盘在进行如下操作时使用。 ●机器人的JOG进给 ●程序创建
●程序的测试执行 ●操作执行 ●状态确认 示教操作盘由如下构件构成。 ●横向40字符、纵向16行的液晶画面显示屏 ●61个键控开关 ●示教操作盘有效开关 ●Deadman开关 ●急停按钮 1、示教操作盘有效开关 在盘左上角,如右图所示: 其将示教操作盘置于有效状态。示教操作盘处在无效状态下,不能进行JOG进给、程序创建与测试执行等操作。 2、Deadman开关 在盘背面,如右图所示两黄色键: 示教操作盘处在有效状态下松开此开关时,机器人 将进入急停状态。 3、急停按钮 在盘右上角,如右图所示红色键: 不管示教操作盘有效开关的状态如何,都会使 执行中的程序停止,机器人伺服电源被切断,使
得机器人进入急停状态。 示教操作盘的键控开关,由如下开关构成。 ●与菜单相关的键控开关 ●与JOG相关的键控开关 ●与执行相关的键控开关 ●与编辑相关的键控开关 1、与菜单相关的键控开关: 1、)、、、、 功能( F )键,用来选择液晶画面最下行的功能键菜单。 2.) 翻页键将功能键菜单切换到下一页。 3、)、 MENU(画面选择)键,按下,显示出画面菜单。 FCTN(辅助)键用来显示辅助菜单。 4、)、、、、、、、、SELECT(一览) 键用来显示程序一览画面。 EDIT(编辑) 键用来显示程序编辑画面。 DATA(数据) 键用来显示寄存器等数据画面。 OTF键用来显示焊接微调整画面。 STATUS(状态显示) 键用来显示状态画面。 I/O(输入/输出)键用来显示I/O画面。 POSN(位置显示) 键用来显示当前位置画面。
工业机器人操作指南
一机器人示教单元使用 1.示教单元的认识 2.使用示教单元调整机器人姿势 在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。
按下面板上的“JOG”键,进入关节调整界面,此时按动J1--J6关节对应的按键可使机器人以关节为运行。按动“OVRD↑”和“OVRD↓”能分别升高和降低运行机器人速度。各轴对应动作方向好下图所示。当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。 按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:
直交调整模式TOOL调整模式
三轴直交调整模式 圆桶调整模式 2.4在手动运行模式下按“HAND”进入手爪控制界面。在机器人本体内部设计有四组双作用
电磁阀控制电路,由八路输出信号OUT-900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。 按键“+C”和“-C”对应“OUT-900”和“OUT-901” 按键“+B”和“-B”对应“OUT-902”和“OUT-903” 按键“+A”和“-A”对应“OUT-904”和“OUT-905” 按键“+Z”和“-Z”对应“OUT-906”和“OUT-907” 在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。 3.使用示教单元设置坐标点 先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列:J1: J5: J2: J6: J3: J4: 先按“FUNCTION”功能键,再按“F4”键退出调整界面。然后按下“F1”键进入