直角坐标系与球面坐标系转换

1. 直角坐标与球坐标
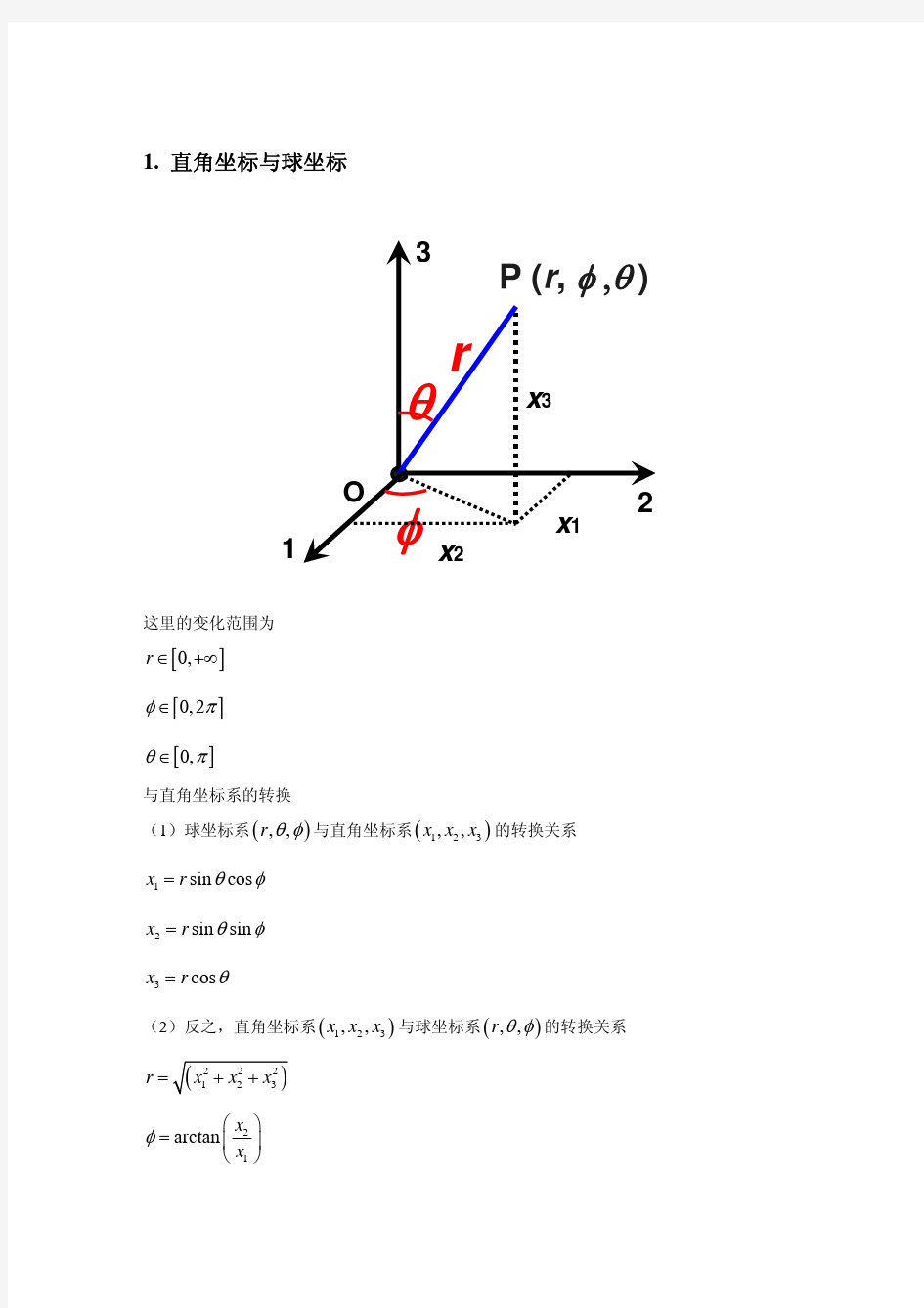
这里的变化范围为 []0,r ∈+∞
[]0,2φπ∈
[]0,θπ∈
与直角坐标系的转换
(1)球坐标系(),,r θφ与直角坐标系()123,,x x x 的转换关系 1sin cos x r θφ=
2sin sin x r θφ=
3cos x r θ=
(2)反之,直角坐标系()123,,x x x 与球坐标系(),,r θφ的转换关系
r =
21arctan x x φ??=????
arccos z r
θ??=???? (3)球坐标系与直角坐标系间单位矢量变化关系 123sin cos sin sin cos r e e e e θφθφθ=++ 12sin cos e e e φφφ=?+
123cos cos cos sin sin e e e e θθφθφθ=+? 球坐标系下,沿基矢方向的三个线段元为 ()dl d r r =
()dl sin d r φθφ=
()dl d r θθ=
球坐标的面元面积
()()2dS=dl *dl sin d d r φθθφθ=
体积元的体积为
()()()2dV=dl *dl *dl sin d d d r r r φθθφθ= 球面坐标中梯度的表达式
()11sin r u u u grad u e e e r r r φθθφθ
???=++??? 梯度,散度及旋度算子
11sin r e e e r r r φθθφθ
????=++??? ()()()()22111sin sin sin r F r r F F F r r r r φθθθ
φθθ????=++??? i 2sin 1sin sin r r e r e re r r
A r A rA φ
θφ
θθθφθθ????×=???A
空间大地坐标系与平面直角坐标系转换公式
§2.3.1 坐标系的分类 正如前面所提及的,所谓坐标系指的是描述空间位置的表达形式,即采用什么方法来表示空间位置。人们为了描述空间位置,采用了多种方法,从而也产生了不同的坐标系,如直角坐标系、极坐标系等。 在测量中常用的坐标系有以下几种: 一、空间直角坐标系 空间直角坐标系的坐标系原点位于参考椭球的中心,Z 轴指向参考椭球的北极,X 轴指向起始子午面与赤道的交点,Y 轴位于赤道面上且按右手系与X 轴呈90°夹角。某点在空间中的坐标可用该点在此坐标系的各个坐标轴上的投影来表示。空间直角坐标系可用图2-3来表示: 图2-3 空间直角坐标系 二、空间大地坐标系 空间大地坐标系是采用大地经、纬度和大地高来描述空间位置的。纬度是空间的点与参考椭球面的法线与赤道面的夹角;经度是空间中的点与参考椭球的自转轴所在的面与参考椭球的起始子午面的夹角;大地高是空间点沿参考椭球的法线方向到参考椭球面的距离。空间大地坐标系可用图2-4来表示:
图2-4空间大地坐标系 三、平面直角坐标系 平面直角坐标系是利用投影变换,将空间坐标空间直角坐标或空间大地坐标通过某种数学变换映射到平面上,这种变换又称为投影变换。投影变换的方法有很多,如横轴墨卡托投影、UTM 投影、兰勃特投影等。在我国采用的是高斯-克吕格投影也称为高斯投影。UTM 投影和高斯投影都是横轴墨卡托投影的特例,只是投影的个别参数不同而已。 高斯投影是一种横轴、椭圆柱面、等角投影。从几何意义上讲,是一种横轴椭圆柱正切投影。如图左侧所示,设想有一个椭圆柱面横套在椭球外面,并与某一子午线相切(此子午线称为中央子午线或轴子午线),椭球轴的中心轴CC ’通过椭球中心而与地轴垂直。 高斯投影满足以下两个条件: 1、 它是正形投影; 2、 中央子午线投影后应为x 轴,且长度保持不变。 将中央子午线东西各一定经差(一般为6度或3度)范围内的地区投影到椭圆柱面上,再将此柱面沿某一棱线展开,便构成了高斯平面直角坐标系,如下图2-5右侧所示。 图2-5 高斯投影 x 方向指北,y 方向指东。 可见,高斯投影存在长度变形,为使其在测图和用图时影响很小,应相隔一定的地区,另立中央子午线,采取分带投影的办法。我国国家测量规定采用六度带和三度带两种分带方法。六度带和三度带与中央子午线存在如下关系: 366 N L =中; n L 33=中 其中,N 、n 分别为6度带和3度带的带号。
空间直角坐标系坐标转换方法
坐标转换方法 空间直角坐标系如果其原点不动,绕着某一个轴旋转而构成的新的坐标系,这个过程就叫做坐标旋转。在旧坐标系中的坐标与在旋转后新坐标系中的坐标有一定的转换关系,这种转换关系可以用转换矩阵来表示。 如图5.7,直角坐标系XYZ,P点的坐标为(x, y, z),其相应的在XY 平面,XZ平面,YZ平面分别为M(x, y,0),Q(x,0, z)和N(0, y, z)。 图5.7直角坐标系XYZ 设?表示第j 轴的旋转角度,R j (?) 表示绕第j 轴的旋转,其正方向是沿坐标轴向原点看去的逆时针方向。很明显当j 轴为旋转轴时,它对应的坐标中的j 分量是不变的。由于直角坐标系是对称的,下面我们以绕Z轴旋转为例推导其旋转变换矩阵,其它两个轴推导和它是一样的。 设图5.7的坐标绕Z轴逆时针旋转θ角度,新坐标为X 'Y'Z',如图5.8所示: 图5.8 坐标绕Z 轴逆时针旋转θ角度 由于坐标中的z 分量不变,我们可以简化地在XY 平面进行分分析,如图
5.9所示: 图5.9坐标绕Z 轴逆时针旋转θ 角度的XY 平面示意图 点 M X 和点M X ' 分别是M 点在X 轴和X '轴的投影。如图5.9 cos cos() sin sin() X X X X x OM OM MOM OM y MM OM MOM OM ?θ?θ==∠=-??==∠=-? (5-1) cos cos sin sin X X X X x OM OM MOM OM y MM OM MOM OM ? ?'''''==∠=??'==∠=? (5-2) 把(5-1)式按照三角函数展开得: cos cos sin sin sin cos cos sin x OM OM y OM OM ?θ?θ ?θ?θ=+??=+? (5-3) 把(5-2)式代入(5-3)式得: cos sin sin cos x x y y x y θθ θθ''=+??''=-+? (5-4) 坐标中的z 分量不变,即z = z'这样整个三维坐标变换就可以写成(用新坐标表 示旧坐标) cos sin sin cos x x y y x y z z θθ θθ''=+? ?''=-+??' =? (5-5) 把式(5-5)用一个坐标旋转变换矩阵R Z (θ) 表示可以写成:
空间直角坐标系整理
2.3.1 空间直角坐标系 一、教材知识解析 1、空间直角坐标系的定义:从空间某一个定点O 引三条互相垂直且有相同单位长度的数轴,这样就建立了空间直角坐标系O-xyz ,点O 叫做坐标原点,x 轴、y 轴和z 轴叫做坐标轴,这三条坐标轴中每两条确定一个坐标平面,分别称为xOy 平面、yOz 平面和xOz 平面。 2、右手直角坐标系及其画法: (1)定义:在空间直角坐标系中,让右手拇指指向x 轴的正方向,食指指向y 轴的正方 向,若中指指向z 轴的正方向,则称这个坐标系为右手直角坐标系。教材上所指的都是右手直角坐标系。 (2)画法: 将空间直角坐标系画在纸上时,x 轴与y 轴、x 轴与z 轴均成135°,而z 轴垂直于y 轴,y 轴和z 轴的长度单位相同,x 轴上的单位长度为y 轴(或z 轴)的长度的一半,这样,三条轴上的单位长度在直观上大体相等。 3、空间中点的坐标表示:点在对应数轴上的坐标依次为x 、y 、z ,我们把有序实数组(x , y ,z )叫做点A 的坐标,记为A (x ,y ,z )。 二、题型解析: 题型1、在空间直角坐标系下作点。 例1、在空间直角坐标系中,作出M(4,2,5). 解:法一:依据平移的方法,为了作出M(4,2,5), 可以按如下步骤进行:(1)在x 轴上取横坐 标为4的点1M ;(2)将1M 在xoy 平面内沿与y 轴平行的方向向右移动2个单位,得到 点2M ;(3)将2M 沿与z 轴平行的方向向上 移动5个单位,就可以得到点M (如图)。 法二:以O 为一个顶点,构造三条棱长分别为4,2,5的长方体,使此长方体在点O 处的三 条棱分别在x 轴的正半轴、y 轴的正半轴、z 轴的正半轴上,则长方体与顶点O 相对的顶点即为所求的点M 。 法三:在x 轴上找到横坐标为4的点,过此点作与x 垂直的平面α;在y 轴上找到纵坐标为2 的点,过此点作与y 垂直的平面β;在z 轴上找到竖坐标为5的点,过此点作与z 垂直的平面γ;则平面αβγ,,交于一点,此交点即为所求的点M 的位置。 【技巧总结】:(1)若要作出点M 000(,,)x y z 的坐标有两个为0,则此点是坐标轴上的点,可 直接在坐标轴上作出此点; (2)若要作出点M 000(,,)x y z 的坐标有且只有一个为0,则此点不在坐标轴上,但在某一坐 标平面内,可以按照类似于平面直角坐标系中作点的方法作出此点。 (3)若要作出点M 000(,,)x y z 的坐标都不为0,则需要按照一定的步骤作出该点,一般有三 种方法:①在x 轴上取横坐标为0x 的点1M ;再将1M 在xoy 平面内沿与y 轴平行的方向向左(00y <)或向右(00y >)平移0||y 个单位,得到点2M ;再将2M 沿与z 轴平
空间直角坐标系与大地坐标系转换程序
空间直角坐标系与大地坐标系转换程序 #include
坐标转换之计算公式
坐标转换之计算公式 一、参心大地坐标与参心空间直角坐标转换 1名词解释: A :参心空间直角坐标系: a) 以参心0为坐标原点; b) Z 轴与参考椭球的短轴(旋转轴)相重合; c) X 轴与起始子午面和赤道的交线重合; d) Y 轴在赤道面上与X 轴垂直,构成右手直角坐标系0-XYZ ; e) 地面点P 的点位用(X ,Y ,Z )表示; B :参心大地坐标系: a) 以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合; b) 大地纬度B :以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B ; c) 大地经度L :以过地面点的椭球子午面与起始子午面之间的夹角为大地经度L ; d) 大地高H :地面点沿椭球法线至椭球面的距离为大地高H ; e) 地面点的点位用(B ,L ,H )表示。 2 参心大地坐标转换为参心空间直角坐标: ?? ???+-=+=+=B H e N Z L B H N Y L B H N X sin *])1(*[sin *cos *)(cos *cos *)(2 公式中,N 为椭球面卯酉圈的曲率半径,e 为椭球的第一偏心率,a 、b 椭球的长短半 径,f 椭球扁率,W 为第一辅助系数 a b a e 2 2-= 或 f f e 1*2-= W a N B W e =-=22sin *1( 3 参心空间直角坐标转换参心大地坐标
[]N B Y X H H e N Y X H N Z B X Y L -+=+-++==cos ))1(**)()(*arctan( )arctan(2 2222 二 高斯投影及高斯直角坐标系 1、高斯投影概述 高斯-克吕格投影的条件:1. 是正形投影;2. 中央子午线不变形 高斯投影的性质:1. 投影后角度不变;2. 长度比与点位有关,与方向无关; 3. 离中央子午线越远变形越大 为控制投影后的长度变形,采用分带投影的方法。常用3度带或6度带分带,城市或工 程控制网坐标可采用不按3度带中央子午线的任意带。 2、高斯投影正算公式: 5 2224253 2236 4254 42232)5814185(cos 120 )1(cos 6 cos )5861(cos sin 720 495(cos sin 24 cos sin 2l t t t B N l t B N Bl N y l t t B B N l t B B N Bl B N X x ηηηηη-++-++-+=+-+++-++=) 3、高斯投影反算公式:
不同空间直角坐标系的转换
不同空间直角坐标系的转换 欧勒角 不同空间直角坐标系的转换,包括三个坐标轴的平移和坐标轴的旋转,以及两个坐标系的尺度比参数,坐标轴之间的三个旋转角叫欧勒角。 三参数法 三参数坐标转换公式是在假设两坐标系间各坐标轴相互平行,轴系间不存在欧勒角的条件下得出的。实际应用中,因为欧勒角不大,可以用三参数公式近似地进行空间直角坐标系统的转换。公共点只有一个时,采用三参数公式进行转换。
七参数法 用七参数进行空间直角坐标转换有布尔莎公式,莫洛琴斯基公式和范氏公式等。下面给出布尔莎七参数公式: 坐标转换多项式回归模型 坐标转换七参数公式属于相似变换模型。大地控制网中的系统误差一般呈区域性,当区域较小时,区域性的系统误差被相似变换参数拟合,故局部区域的坐标转换采用七参数公式模型是比较适宜的。但对全国或一个省区范围内的坐标转换,可以采用多项式回归模型,将各区域的系统偏差拟合到回归参数中,从而提高坐标转换精度。 两种不同空间直角坐标系转换时,坐标转换的精度取决于坐标转换的数学模型和求解转换系数的公共点坐标精度,此外,还与公共点的分布有关。鉴于地面控制网系统误差在???? ??????+??????????=??????????000111222Z Y X Z Y X Z Y X ???? ??????+????????????????????---+??????????+=??????????000111111222000)1(Z Y X Z Y X Z Y X m Z Y X X Y X Z Y Z εεεεεε
不同区域并非是一个常数,所以采用分区进行坐标转换能更好地反映实际情况,提高坐标转换的精度。
知识讲解空间直角坐标系基础
空间直角坐标系 【学习目标】 通过具体情境,感受建立空间直角坐标系的必要性,了解空间直角坐标系,会用空间直角坐标系刻画点的位置.通过表示特殊长方体(所有棱分别与坐标轴平行)顶点的坐标,探索并得出空间两点间的距离公式. 【要点梳理】 要点一、空间直角坐标系 1.空间直角坐标系 从空间某一定点O 引三条互相垂直且有相同单位长度的数轴,这样就建立了空间直角坐标系Oxyz ,点O 叫做坐标原点,x 轴、y 轴、z 轴叫做坐标轴,这三条坐标轴中每两条确定一个坐标平面,分别是xOy 平面、yOz 平面、zOx 平面. 2.右手直角坐标系 在空间直角坐标系中,让右手拇指指向x 轴的正方向,食指指向y 轴的正方向,如果中指指向z 轴的正方向,则称这个坐标系为右手直角坐标系. 3.空间点的坐标 空间一点A 的坐标可以用有序数组(x ,y ,z)来表示,有序数组(x ,y ,z)叫做点A 的坐标,记作A(x ,y ,z),其中x 叫做点A 的横坐标,y 叫做点A 的纵坐标,z 叫做点A 的竖坐标. 要点二、空间直角坐标系中点的坐标 1.空间直角坐标系中点的坐标的求法 通过该点,作两条轴所确定平面的平行平面,此平面交另一轴于一点,交点在这条轴上的坐标就是已知点相应的一个坐标. 特殊点的坐标:原点()0,0,0;,,x y z 轴上的点的坐标分别为()()(),0,0,0,,0,0,0,x y z ;坐标平面,,xOy yOz xOz 上的点的坐标分别为()()(),,0,0,,,,0,x y y z x z .
2.空间直角坐标系中对称点的坐标 在空间直角坐标系中,点(),,P x y z ,则有 点P 关于原点的对称点是()1,,P x y z ---; 点P 关于横轴(x 轴)的对称点是()2,,P x y z --; 点P 关于纵轴(y 轴)的对称点是()3,,P x y z --; 点P 关于竖轴(z 轴)的对称点是()4,,P x y z --; 点P 关于坐标平面xOy 的对称点是()5,,P x y z -; 点P 关于坐标平面yOz 的对称点是()6,,P x y z -; 点P 关于坐标平面xOz 的对称点是()7,,P x y z -. 要点三、空间两点间距离公式 1.空间两点间距离公式 空间中有两点()()111222,,,,,A x y z B x y z ,则此两点间的距离 ||d AB == 特别地,点(),,A x y z 与原点间的距离公式为OA = 2.空间线段中点坐标 空间中有两点()()111222,,,,,A x y z B x y z ,则线段AB 的中点C 的坐标为121212,,222x x y y z z +++?? ???. 【典型例题】 类型一:空间坐标系 例1.在正方体ABCD —A 1B 1C 1D 1中,E 、F 分别是BB 1、D 1B 1的中点,棱长为1,建立空间直角坐标系,求点E 、F 的坐标。 【答案】11,0,2E ? ? ???,11,,122F ?? ??? 【解析】 法一:如图,以A 为坐标原点,以AB ,AD ,AA 1所在直线分别为x 轴,y 轴,z 轴建立空
大地坐标转换成施工坐标公式
大地(高斯平面)坐标系工程坐标系转换大地坐标系--->工程坐标系 ======================== 待转换点为P,大地坐标为:Xp、Yp 工程坐标系原点o: 大地坐标:Xo、Yo 工程坐标:xo、yo 工程坐标系x轴之大地方位角:a dX=Xp-Xo dY=Yp-Yo P点转换后之工程坐标为xp、yp: xp=dX*COS(a)+dY*SIN(a)+xo yp=-dX*SIN(a)+dY*COS(a)+yo 工程坐标系--->大地坐标系 ======================== 待转换点为P,工程坐标为:xp、yp 工程坐标系原点o: 大地坐标:Xo、Yo 工程坐标:xo、yo 工程坐标系x轴之大地方位角:a dx=xp-xo dy=yp-yo P点转换后之工程坐标为xp、yp: xp=Xo+dx*COS(a)-dy*SIN(a)
yp=Yo+dx*SIN(a)+dy*COS(a) 坐标方位角计算程序 置镜点坐标:ZX ZY 后视点坐标:HX HY 方位角:W 两点间距离: S Lb1 0← {A, B, C, D}← A〝ZX=〞:B〝ZY=〞:C〝HX=〞:D 〝HY=〞:W=tg1((D-B)÷(C-A)):(D-B)>0=>(C-A)>0=>W=W:∟∟(D-B)>0=>(C-A)<0=>W=W+180:∟∟(D-B)<0=>(C-A)<0=>W=W+180:∟∟(D-B)<0=>(C-A)>0=>W=360+W∟∟W=W◢ S=√((D-B)2+(C-A)2) ◢ Goto 0← CASIO fx-4500p坐标计算程序 根据坐标计算方位角 W=W+360△W:“ALF(1~2)=”L1 A“X1=”:B“Y1=”:Pol(C“X2”-A,D“Y2”-B:“S=”▲W<0 直线段坐标计算 L1 X“X(0)”:Y“Y(0)”:S“S(0)”:A“ALF” L2 Lb1 2 L3 {L}:L“LX”
大地坐标与直角空间坐标转换计算公式
大地坐标与直角空间坐标转换计算公式 一、参心大地坐标与参心空间直角坐标转换 1名词解释: A :参心空间直角坐标系: a) 以参心0为坐标原点; b) Z 轴与参考椭球的短轴(旋转轴)相重合; c) X 轴与起始子午面和赤道的交线重合; d) Y 轴在赤道面上与X 轴垂直,构成右手直角坐标系0-XYZ ; e) 地面点P 的点位用(X ,Y ,Z )表示; B :参心大地坐标系: a) 以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合; b) 大地纬度B :以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B ; c) 大地经度L :以过地面点的椭球子午面与起始子午面之间的夹角为大地经度L ; d) 大地高H :地面点沿椭球法线至椭球面的距离为大地高H ; e) 地面点的点位用(B ,L ,H )表示。 2 参心大地坐标转换为参心空间直角坐标: ?? ? ?? +-=+=+=B H e N Z L B H N Y L B H N X sin *])1(*[sin *cos *)(cos *cos *)(2 公式中,N 为椭球面卯酉圈的曲率半径,e 为椭球的第一偏心率,a 、b 椭球的长短半径,f 椭球扁率,W 为第一辅助系数 a b a e 2 2-= 或 f f e 1 *2-= W a N B W e = -=22 sin *1( 西安80椭球参数: 长半轴a=6378140±5(m )
短半轴b=6356755.2882m 扁 率α=1/298.257 3 参心空间直角坐标转换参心大地坐标 [ ] N B Y X H H e N Y X H N Z B X Y L -+= +-++==cos ))1(**)() (*arctan() arctan(2 22 2 2 二 高斯投影及高斯直角坐标系 1、高斯投影概述 高斯-克吕格投影的条件:1. 是正形投影;2. 中央子午线不变形 高斯投影的性质:1. 投影后角度不变;2. 长度比与点位有关,与方向无关; 3. 离中央子午线越远变形越大 为控制投影后的长度变形,采用分带投影的方法。常用3度带或6度带分带,城市或工程控制网坐标可采用不按3度带中央子午线的任意带。 2、高斯投影正算公式: 52224253 2236 425442232)5814185(cos 120 )1(cos 6 cos )5861(cos sin 720 495(cos sin 24cos sin 2l t t t B N l t B N Bl N y l t t B B N l t B B N Bl B N X x ηηηηη-++-++-+=+-+++-++ =) 3、高斯投影反算公式:
空间直角坐标系的旋转转换
空间直角坐标系的旋转转换 using System; using System.Collections.Generic; using https://www.360docs.net/doc/2214922374.html,ponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.IO; using System.Windows.Forms; namespace ReferenceTransition { public partial class Form1 : Form { public Form1() { this.MaximizeBox = false; InitializeComponent(); } private double x, y, z; private double i, j, k; private double a1,a2,a3; private double b1, b2, b3; private double c1, c2, c3; private double rx, ry, rz; private string t1, t2, t3; private string k1, k2, k3; private void button1_Click(object sender, EventArgs e) { textBox1.Text = ""; textBox2.Text = ""; textBox3.Text = ""; textBox4.Text = ""; textBox5.Text = ""; textBox6.Text = ""; textBox7.Text = ""; textBox8.Text = ""; textBox9.Text = ""; richTextBox1.Text = ""; } private void button4_Click(object sender, EventArgs e) { try {
建立空间直角坐标系的几个常见思路
建立空间直角坐标系的几种常见思路 坐标法是利用空间向量的坐标运算解答立体几何问题的重要方法,运用坐标法解题往往需要建立空间直角坐标系.依据空间几何图形的结构特征,充分利用图形中的垂直关系或构造垂直关系来建立空间直角坐标系,是运用坐标法解题的关键.下面举例说明几种常见的空间直角坐标系的构建策略. 一、利用共顶点的互相垂直的三条棱构建直角坐标系 例1 已知直四棱柱ABCD -A 1B 1C 1D 1中,AA 1=2,底面ABCD 是直角梯形,∠A 为直角,AB ∥CD ,AB =4,AD =2,DC =1,求异面直线BC 1与DC 所成角的余弦值. 解析:如图1,以D 为坐标原点,分别以DA 、DC 、DD 1所在直线为x 、y 、z 轴建立空间直角坐标系,则C 1(0,1,2)、B (2,4,0), ∴1(232)BC =--,,,(010)CD =-, ,. 设1BC 与CD 所成的角为θ, 则11317cos BC CD BC CD θ==. 二、利用线面垂直关系构建直角坐标系 例2 如图2,在三棱柱ABC -A 1B 1C 1中,AB ⊥侧面BB 1C 1C ,E 为棱CC 1上异于C 、C 1的一点,EA ⊥EB 1.已知2AB =,BB 1=2,BC =1,∠BCC 1=3 π.求二面角A -EB 1-A 1的平面角的正切值. 解析:如图2,以B 为原点,分别以BB 1、BA 所在直线为y 轴、z 轴,过B 点垂直于平面AB 1的直线为x 轴建立空间直角坐标系. 由于BC =1,BB 1=2,AB =2,∠BCC 1=3 π, ∴在三棱柱ABC -A 1B 1C 1中,有B (0,0,0)、A (0,0,2)、B 1(0,2,0)、3102c ??- ? ??? ,,、133022C ?? ? ?? ?,,. 设302E a ?? ? ??? ,,且1322a -<<, 由EA ⊥EB 1,得10EA EB =, 即3322022a a ????---- ? ? ? ???? ,,,,
坐标转换模型
坐标转换模型 1.空间直角坐标系间的转换模型(七参数模型) ①公式(布尔莎模型): ②分析: (1)将O-XYZ中的长度单位缩放l+m倍,使其与O'-X'Y'Z'的长度单位一致; (2)从X反向看向原点O,以O为旋转点,让O-XYZ绕X轴顺时针旋转Wx角,使经过旋转后的Y轴与O'-X'Y'Z’平面平行; (3)从Y反向看向原点O,以O为旋转点,让O-XYZ绕Y轴顺时针旋转Wy角,使经过旋转后的X轴与O'-X'Y'Z'平面平行。显然,此时Z轴也与Z'轴平行; (4)从Z反向看向原点O,以O点为旋转点,O-XYZ绕Z轴顺时针旋转Wz角,使经过旋转后的X轴与X’轴平行。显然,此时O-XYZ的三个坐标轴己与O'-X'Y'Z’中相应的坐标轴平行; 原坐标为O-XYZ,转换到新坐标O-X’Y’Z’.(两坐标系都为空间直角坐标系)其中(dX dY dZ)为坐标原点的平移参数,即将坐标O-XYZ的原点分别沿三个坐标轴平移-dX,-dY,-dZ,使原坐标轴与O-X’Y’Z’的点重合。m为尺度参数,(w1 w2 w3)分别为坐标轴的旋转参量(角度),构成的旋转矩阵分别为: 分别将R1 R2 R3代入上式,可得:
当旋转角度w1 w2 w3很小时(<=10),cos(w)=1,sin(w)=0;在误差允许范围内可以将模型简化为:(同样七参数模型) 四参数模型是在七参数模型的特例,没有考虑坐标轴的旋转量,只考虑坐标轴的平移。 总结: 类似布尔莎模型(以坐标原点为参考点),还有莫洛金斯基坐标模型(以目标点为变换中心)、武测转换模型和范士转换模型(以控制网参考点的站心地平坐标系的三个坐标轴为旋转轴),这些坐标转换模型很容易实现相关坐标在不同坐标系的转换,但是参考位置的偏移向量的相关参数,在实际运用中这些参量是很难测定的,并且受地球重力等物理因素的影响,两个坐标系统即使经过相似变换,仍可能存在较大的残差,所以这些模型适用于简单且规则模型中。 ④程序: clc clear all dX=input('please input value of dX=');
坐标转换之计算公式
创作编号: GB8878185555334563BT9125XW 创作者: 凤呜大王* 坐标转换之计算公式 一、参心大地坐标与参心空间直角坐标转换 1名词解释: A :参心空间直角坐标系: a) 以参心0为坐标原点; b) Z 轴与参考椭球的短轴(旋转轴)相重合; c) X 轴与起始子午面和赤道的交线重合; d) Y 轴在赤道面上与X 轴垂直,构成右手直角坐标系0-XYZ ; e) 地面点P 的点位用(X ,Y ,Z )表示; B :参心大地坐标系: a) 以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合; b) 大地纬度B :以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B ; c) 大地经度L :以过地面点的椭球子午面与起始子午面之间的夹角为大地经度 L ; d) 大地高H :地面点沿椭球法线至椭球面的距离为大地高H ; e) 地面点的点位用(B ,L ,H )表示。 2 参心大地坐标转换为参心空间直角坐标: ?? ? ?? +-=+=+=B H e N Z L B H N Y L B H N X sin *])1(*[sin *cos *)(cos *cos *)(2 公式中,N 为椭球面卯酉圈的曲率半径,e 为椭球的第一偏心率,a 、b 椭球的长短半径,f 椭球扁率,W 为第一辅助系数
a b a e 2 2-= 或 f f e 1 *2-= W a N B W e = -=22 sin *1( 3 参心空间直角坐标转换参心大地坐标 [ ] N B Y X H H e N Y X H N Z B X Y L -+= +-++==cos ))1(**)() (*arctan() arctan(2 22 2 2 二 高斯投影及高斯直角坐标系 1、高斯投影概述 高斯-克吕格投影的条件:1. 是正形投影;2. 中央子午线不变形 高斯投影的性质:1. 投影后角度不变;2. 长度比与点位有关,与方向无关; 3. 离中央子午线越远变形越大 为控制投影后的长度变形,采用分带投影的方法。常用3度带或6度带分带,城市或工程控制网坐标可采用不按3度带中央子午线的任意带。 2、高斯投影正算公式:
平面直角坐标变换
平面直角坐标变换 【摘要】对利用EXCEL电子表格进行高斯投影换算的方法进行了较详细的介绍,对如何进行GPS坐标系转换进行了分析,提出了一种简单实用的坐标改正转换方法,介绍了用EXCEL完成转换的思路。 [关键字] 电子表格;GPS;坐标转换 作为尖端技术GPS,能方便快捷性地测定出点位坐标,无论是操作上还是精度上,比全站仪等其他常规测量设备有明显的优越性。随着我国各地GPS差分台站的不断建立以及美国SA政策的取消,使得单机定位的精度大大提高,有的已经达到了亚米级精度,能够满足国土资源调查、土地利用更新、遥感监测、海域使用权清查等工作的应用。在一般情况下,我们使用的是1954年北京坐标系或1980年西安坐标系(以下分别简称54系和80系),而GPS测定的坐标是WGS-84坐标系坐标,需要进行坐标系转换。对于非测量专业的工作人员来说,虽然GPS定位操作非常容易,但坐标转换则难以掌握,EXCEL是比较普及的电子表格软件,能够处理较复杂的数学运算,用它来进行GPS坐标转换、面积计算会非常轻松自如。要进行坐标系转换,离不开高斯投影换算,下面分别介绍用EXCEL进行换算的方法和GPS 坐标转换方法。 一、用EXCEL进行高斯投影换算 从经纬度BL换算到高斯平面直角坐标XY(高斯投影正算),或从XY换算成BL(高斯投影反算),一般需要专用计算机软件完成,在目前流行的换算软件中,存在一个共同的不足之处,就是灵活性较差,大都需要一个点一个点地进行,不能成批量地完成,给实际工作带来许多不便。笔者发现,用EXCEL可以很直观、方便地完成坐标换算工作,不需要编制任何软件,只需要在EX CEL的相应单元格中输入相应的公式即可。下面以54系为例,介绍具体的计算方法。 完成经纬度BL到平面直角坐标XY的换算,在EXCEL中大约需要占用21列,当然读者可以通过简化计算公式或考虑直观性,适当增加或减少所占列数。在EXCEL中,输入公式的起始单元格不同,则反映出来的公式不同,以公式从第2行第1列(A2格)为起始单元格为例,各单元格的公式如下: 单元格 单元格内容 说明A2 输入中央子午线,以度.分秒形式输入,如115度30分则输入1 15.30 起算数据L0 B2 =INT(A2)+(INT(A2*100)-INT(A2)*100)/60+(A2*10000-INT(A2* 100)*100)/3600 把L0化成度 C2 以度小数形式输入纬度值,如38°14′20″则输入38.1420 起算数据B D2 以度小数形式输入经度值 起算数据L E2 =INT(C2)+(INT(C2*100)-INT(C2)*100)/60+(C2*10000-INT(C2* 100)*100)/3600 把B化成度 F2 =INT(D2)+(INT(D2*100)-INT(D2)*100)/60+(D2*10000-INT(D2* 100)*100)/3600 把L化成度 G2 =F2-B2 L-L0 H2 =G2/57.2957795130823 化作弧度 I2 =TAN(RADIANS(E2)) Tan(B) J2 =COS(RADIANS(E2)) COS(B)
空间直角坐标系与空间大地坐标系的相互转换及其C++源程序
空间直角坐标系与空间大地坐标系的相互转换 1.空间直角坐标系/笛卡尔坐标系 坐标轴相互正交的坐标系被称作笛卡尔坐标系。三维笛卡尔坐标系也被称为空间直角坐标系。在空间直角坐标系下,点的坐标可以用该点所对应的矢径在三个坐标轴上的投影长度来表示,只有确定了原地、三个坐标轴的指向和尺度,就定义了一个在三维空间描述点的位置的空间直角坐标系。 以椭球体中心O为原点,起始子午面与赤道面交线为X轴,在赤道面上与X轴正交的方向为Y轴,椭球体的旋转轴为Z轴构成右手坐标系O.XYZ,在该坐标系中,P点的位置用X,Y,Z表示。 在测量应用中,常将地球空间直角坐标系的坐标原点选在地球质心(地心坐标系)或参考椭球中心(参心坐标系),z轴指向地球北极,x轴指向起始子午面与地球赤道的交点,y轴垂直于XOZ面并构成右手坐标系。 空间直角坐标系 2.空间大地坐标系 由于空间直角坐标无法明确反映出点与地球之间的空间关系,为了解决这一问题,在测量中引入了大地基准,并据此定义了大地坐标系。大地基准指的是用于定义地球参考椭球的一系列参数,包括如下常量: 2.1椭球的大小和形状
2.2椭球的短半轴的指向:通常与地球的平自转轴平息。 2.3椭球中心的位置:根据需要确定。若为地心椭球,则其中心位于地球质心。 2.4本初子午线:通过固定平极和经度原点的天文子午线,通常为格林尼治子午线。 以大地基准为基础建立的坐标系被称为大地坐标系。由于大地基准又以参考椭球为基准,因此,大地坐标系又被称为椭球坐标系。大地坐标系是参心坐标系,其坐标原点位于参考椭球中心,以参考椭球面为基准面,用大地经度L、纬度B 和大地高H表示地面点位置。过地面点P的子午面与起始子午面间的夹角叫P 点的大地经度。由起始子午面起算,向东为正,叫东经(0°~180°),向西为负,叫西经(0°~-180°)。过P点的椭球法线与赤道面的夹角叫P点的大地纬度。由赤道面起算,向北为正,叫北纬(0°~90°),向南为负,叫南纬(0°~-90°)。从地面点P沿椭球法线到椭球面的距离叫大地高。大地坐标坐标系中,P点的位置用L,B表示。如果点不在椭球面上,表示点的位置除L,B外,还要附加另一参数——大地高H。 空间大地坐标系 3.空间直角坐标与大地坐标间的转换 3.1大地坐标转换为空间直角坐标
建立空间直角坐标系的几种方法
建立空间直角坐标系的几种方法 坐标法是利用空间向量的坐标运算解答立体几何问题的重要方法,运用坐标法解题往往需要建立空间直角坐标系.依据空间几何图形的结构特征,充分利用图形中的垂直关系或构造垂直关系来建立空间直角坐标系,是运用坐标法解题的关键.下面举例说明几种常见的空间直角坐标系的构建策略. 一、利用共顶点的互相垂直的三条棱构建直角坐标系 例1 已知直四棱柱ABCD -A 1B 1C 1D 1中,AA 1=2,底面ABCD 是直角梯形,∠A 为直角,AB ∥CD ,AB =4,AD =2,DC =1,求异面直线BC 1与DC 所成角的余弦值. 解析:如图1,以D 为坐标原点,分别以DA 、DC 、DD 1所在直线为x 、y 、z 轴建立空间直角坐标系,则C 1(0,1,2)、B (2,4,0), ∴1(232)BC =-- , ,,(010)CD =- ,,. 设1BC 与CD 所成的角为θ, 则11cos 17BC CD BC CD θ== . 二、利用线面垂直关系构建直角坐标系 例2 如图2,在三棱柱ABC -A 1B 1C 1中,AB ⊥侧面BB 1C 1C ,E 为棱CC 1上异于C 、C 1的一点,EA ⊥EB 1 .已知AB =BB 1=2,BC =1,∠BCC 1=3 π.求二面角A -EB 1-A 1的平面角的正切值. 解析:如图2,以B 为原点,分别以BB 1、BA 所在直线为y 轴、z 轴,过B 点垂直于平面AB 1的直线为x 轴建立空间直角坐标系. 由于BC =1,BB 1=2,AB ,∠BCC 1=3 π, ∴在三棱柱ABC -A 1B 1C 1中,有B (0,0,0)、A (0, )、B 1(0,2,0) 、102c ?-???? ,、1302C ???? ?,,. 设0E a ????? ,且1322a -<<, 由EA ⊥EB 1,得10EA EB = ,
不同坐标系之间的变换
不同坐标系之间的变换 SANY GROUP system office room 【SANYUA16H-
§10.6不同坐标系之间的变换 10.6.1欧勒角与旋转矩阵 对于二维直角坐标,如图所示,有: ?? ? ?????????-=??????1122cos sin sin cos y x y x θθθθ(10-8) 在三维空间直角坐标系中,具有相同原点的两坐标系间的变换一般需要在三个坐标平面上,通过三次旋转才能完成。如图所示,设旋转次序为: ①绕1OZ 旋转Z ε角,11,OY OX 旋 转至0 0,OY OX ; ②绕0 OY 旋转Y ε角 10 ,OZ OX 旋转至0 2 ,OZ OX ; ③绕2OX 旋转X ε角, 0,OZ OY 旋转至22,OZ OY 。 Z Y X εεε,,为三维空间直角坐标变换的三个旋转角,也称欧勒角,与 它相对应的旋转矩阵分别为: ???? ? ?????-=X X X X X R εεεεεcos sin 0sin cos 00 01 )(1 (10-10)
????? ?????-=Y Y Y Y Y R εεεεεcos 0sin 010sin 0cos )(2 (10-11) ???? ? ?????-=10 0cos sin 0sin cos )(3Z Z Z Z Z R εεεεε (10-12) 令 )()()(3210Z Y X R R R R εεε= (10- 13) 则有: ???? ? ?????=??????????=??????????1110111321222)()()(Z Y X R Z Y X R R R Z Y X Z Y X εεε (10-14) 代入: ???? ??? ??? +-+++--=Y X Z Y X Z X Z Y X Z X Y X Z Y X Z X Z Y X Z X Y Z Y Z Y R εεεεεεεεεεεεεεεεεεεεεεεεεεεεεcos cos sin sin cos cos sin cos sin cos sin sin cos sin sin sin sin cos cos cos sin sin sin cos sin sin cos cos cos 0一般Z Y X εεε,,为微小转角,可取: sin sin sin sin sin sin sin ,sin ,sin 1cos cos cos =========Z Y Z X Y X Z Z Y Y X X Z Y X εεεεεεεεεεεεεεε 于是可化简
空间坐标转换说明
坐标转换说明 GPS 接收机接收到GPS (大地坐标:经度、纬度和高度值)信号后,并不利于显示,需要将大地坐标进行转换,现选用东北天坐标系(也叫站心坐标系)作为显示的依据。 GPS 接收机接收到的第一个信号L (经度)、B (纬度)和H (高度),作为东北天坐标系的原点。当接收到第二个信号时L 1、B 1和H 1,应用坐标转换公式,转换到东北天坐标系下进行显示。依次类推,凡是接收到的GPS 信号都转换到东北天坐标系下进行显示,在东北天坐标系下预测出来的坐标值通过坐标转换公式在显示屏上显示大地坐标(经度、纬度和高度)。 1.大地坐标与直角坐标的相互转化 对空间某一点,大地坐标系(L ,B ,H )到直角坐标系(X ,Y ,Z )的转换关系如下: ?? ???+-=+=+=B H e N Z L B H N Y L B H N X sin ])1([sin cos )(cos cos )(2 (1) 由直角坐标系(X ,Y ,Z )转化到大地坐标系(L ,B ,H )的公式如下: ??? ????--=+-++==)1(sin /]})1((/[)(arctan{)/arctan(2222e N B Z H H e N Y X H N Z B X Y L (2) 式中:B e a N 22sin 1/-=,N 为该点的卯酉圈曲率半径;2222/)(a b a e -=,a 、b 、e 分别为该大地坐标系对应参考椭球的长半轴、短半轴和第一偏心率。长半 轴a =6378137±2m ,短半轴b =6356.7523142km ,90130066943799 .02=e 。 从公式(2)看出,经度比较容易求得,纬度和高度必须通过迭代计算获直接计算得到。迭代计算的次序为:N H B →→,通常迭代四次可以达到H 优于0.001m ,B 优于0.00001''的计算精度;教科书中给出的直接法计算公式比较繁琐,有的计算公式的应用条件受到一定限制,例如要求大地高度小于10000m 时,才能使B 、H 达到上述计算精度,有的直接计算公式精度较低。 根据[张华海]提供的方法,本文建议采用该方法将直角坐标(X ,Y ,Z )转变成大地坐标(L ,B ,H )。该方法的公式形式比较简便,B 、H 的计算精度高;用计算出的具有一定精度的0B ,直接求出H ,一次性计算出满足精度要求的H ;再将H 值代入公式(2)中,求出B 值。 令))/(arctan(22b Y X Za u ?+=,a 、b 分别为长半轴和短半轴。将u 代入下