基于贝叶斯推理的数据融合

基于贝叶斯推理的数据融合
1 贝叶斯推理的基本原理 (1)
2 数据融合中的贝叶斯推理 (2)
3 贝叶斯推理方法的优缺点 (3)
1 贝叶斯推理的基本原理
贝叶斯推理是英国学者Thomas Bayes 于1763年提出的,两个世纪以来,它越发展现出广阔的应用前景。贝叶斯推理的基本原理是随着测量的到来,将给定假设的先验密度更新为后验密度。贝叶斯推理与经典推理的不同之处,除对似然函数进行变换外,还可以用于多假设情况。
贝叶斯推理的基本原理是:给定一个前面的似然估计后,若又增加一个证据(测量),则可以对前面的(关于目标属性的)似然估计加以更新。也就是说,随着测量值的到来,可以将给定假设的先验密度更新为后验密度。贝叶斯推理的另一个特点是它适合于多假设情况。 假设12,,...,n A A A 表示n 个互不相容的穷举假设(即存在具有属性i 的一个目标)为一个事件(或事实,观测等),贝叶斯公式的形式为: 1()()
()()()i i i n j j
j P B A P A P A B P B A P A ==∑ (1)
且 ()1n i
i
P A =∑ 11()()(,)()n
n i i i
i i P B A P A P B A P B ====∑∑
()i P A 表示事件12,,...,n A A A 出现的可能性大小,为假设1A 为真的先验概率,这是实验前就已知道的事实。()i P A B 为给定证据B (目标i 存在)条件下,假设1A 为真的后布密度。
2 数据融合中的贝叶斯推理
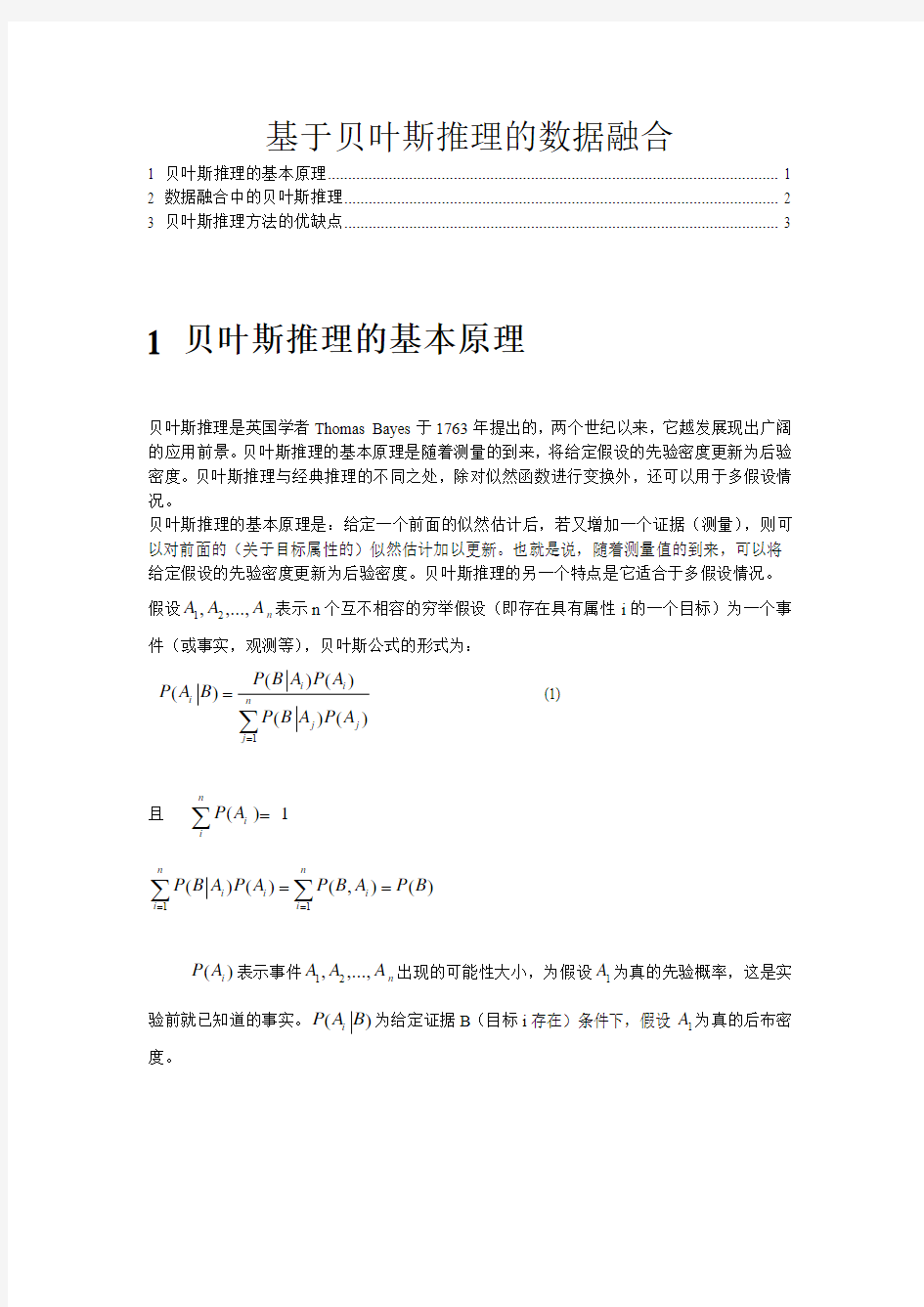
贝叶斯推理方法可以对多传感器测量数据进行融合,以计算出给定假设为真的后验概率。设有n 个传感器,它们可能是不同类的,他们共同对一个目标进行探测。再设目标有m 个属性需要进行识别,即有m 个假设或命题1,2,...,i A m =。贝叶斯融合算法在实现上分多级进行。在传感器一级,将测量数据依其获取的信息特征与要识别的目标属性联系进行分类,最终给出关于目标属性的一个说明12,,...,n B B B ,它依赖于测量数据和传感器分类法。第二步是计算每个传感器的说明(证据)在各假设为真条件下的似然函数。第三步是依据贝叶斯公司计算多测量证据下各个假设为真的后验概率。最后一步是判定逻辑,以产生属性判定结论,过程如图1所示
传感器1传感器2传感器n P(B1/Aj )
P(B2/Aj)P(Bn/Aj )
组合贝叶斯公式贝叶斯统计接侧判断逻辑极大后验给定门限的
极大后验等
B1B2B3融合结果
图1 基于贝叶斯推理的数据融合
在第三步中,计算目标身份的融合概率应分两步。首先,计算出假设i A 条件下,n 个证据联合似然函数,当各传感器独立探测时,12,,...,n B B B 相互独立,该联合似然函数为 1212(,,...,)()()...()n j j j n j P B B B A P B A P B A P B A = (2)
然后,应用Bayes 公式得到n 个证据条件下,假设的后验概率k A
121212(,,...,)()
(,,...,)(,,...,)n j j j n n P B B B A P A P A B B B P B B B = (3)
第四步一般是采用极大后验判定逻辑,直接选取或判定门限选取具有最大后验联合概率的目
标属性。取满足下述条件的假设k A
12121(,,...,)max (,,...,)k n k n j n
P A B B B P A B B B ≤≤= (4)
作为判定结果。在需要的场合,还需要对最大后验概率的假设景象门限判定,判定规则如下:1P 为判定门限,若
12(,,...,)k n o P A B B B P ≥ (5)
则接受k A 否则拒绝判断等下一观测的到来。形成新的证据,再进行上述判定过程。
在使用贝叶斯方法时,需要我们实现能计算每个传感器对每个假设时间的似然函数()i P B A ,以及各假设事件i A 的先验概率()i P A 。当先验知识里缺少各假设事件i A 发生的可能性时,我们可以采用无差别对待原则,即可以为各()i P A 设置相同的值。
3 贝叶斯推理方法的优缺点
贝叶斯推理方法是最早用于补确定推理的方法,主要优点是具有公理基础和易于理解的数学性质,而且仅需中等计算时间。
主要缺点有:
(1) 所有要求的概率都是独立的,这给实际系统带来了很大的困难。有时甚至是不实际的。
(2) 先验知识的条件概率的获取,一方面比较困难,另一方面,很难保证领域专家给出的概率具有前有一致性,就需要领域专家和计算机花大量的时间来检验系统中概率的一致性。
(3) 为了保证系统的相关性和一致性,在系统中增加或删除一个规则时,需要重新计算所有的概率,不利于规则库的及时增加新规则或删除旧规则。
(4) 贝叶斯方法要求有统一的识别框架,不能再不同的层次上组合证据,当对不同层次的证据进行组合时,由于强行分配先验概率等,肯呢个引起错误的结论。
基于Bayes估计的多传感器数据融合方法研究
2000年7月系统工程理论与实践第7期 文章编号:1000-6788(2000)07-0045-04 基于Bayes估计的多传感器数据融合方法研究 吴小俊,曹奇英,陈保香,刘同明 (华东船舶工业学院电子与信息系,江苏镇江 212003) 摘要: 对多传感器数据融合方法进行研究,以Bayes估计理论为基础得到了多传感器最优融合数 据,并将它与其它方法得到的融合数据进行了比较. 关键词: Bayes估计;传感器;数据融合 中图分类号: T P30;T P27;T P18 Study on M ultisensor Data Fusion Methods Based on Bayes Estimation WU Xiao-jun,CAO Qi-ying,CHEN Bao-xiang,LIU Tong-ming (D epar tment o f Electr onics and Info rmat ion East China Shipbuilding I nstitute,Z henjiang Jiang su212003) Abstract: I n this paper,study is made o n the multisenso r dat a fusion methods.T he optimal fused data is g iven by Bayes estimat ion theo ry,and o ptimal fused results obtained by o ther m ethods ar e compar ed w ith it. Keywords: Bay es est imation;sensor;data fusion 1 引言 多传感器数据融合(Data F usion)或多传感器情报融合(Infor matio n Fusio n),是多谱传感器系统的一项核心技术,也是军事电子领域新近才出现的一个新兴技术方向.这一方向的出现归因于同一系统中同时使用着多个信息采集传感器.它们既可以是同种类型的,也可以是不同类型的.然而在实际应用中不同的传感器所测得的同一物体的某特性参数的数据会有偏差.数据融合的目的在于运用一定的准则和算法,借助现代科技成果,自动对来自各信源的数据呈报进行联合、变换、相关和合成,从中提取质量的战术情报,洞察战场威胁态势,为作战指挥决策提供可靠依据[1,2].本文以置信距离测度作为数据融合的融合度,利用置信矩阵、关系矩阵得到多传感器的最佳融合数,以Bay es估计理论为基础得到多传感器最优融合数据. 2 置信距离测度、置信距离矩阵及最佳融合数的确定[2] 多传感器测量同一指标参数时,设第i个传感器和第j个传感器测得的数据为X i、X j,X i、X j都服从正态分布,以它们的p df曲线作为传感器的特征函数,记成p i(x)、p j(x),x i、x j为X i、X j的一次观测值(读数). 为反映x i、x j之间的偏差大小,引进置信距离测度,设 d ij=2∫x j x i p i x x i d x=2A(1) d j i=2∫x i x j p i x x j d x=2B(2) 收稿日期:1998-12-14 资助项目:中国船舶工业总公司国防预研项目
基于贝叶斯推理的数据融合
基于贝叶斯推理的数据融合 1 贝叶斯推理的基本原理 (1) 2 数据融合中的贝叶斯推理 (2) 3 贝叶斯推理方法的优缺点 (3) 1 贝叶斯推理的基本原理 贝叶斯推理是英国学者Thomas Bayes 于1763年提出的,两个世纪以来,它越发展现出广阔的应用前景。贝叶斯推理的基本原理是随着测量的到来,将给定假设的先验密度更新为后验密度。贝叶斯推理与经典推理的不同之处,除对似然函数进行变换外,还可以用于多假设情况。 贝叶斯推理的基本原理是:给定一个前面的似然估计后,若又增加一个证据(测量),则可以对前面的(关于目标属性的)似然估计加以更新。也就是说,随着测量值的到来,可以将给定假设的先验密度更新为后验密度。贝叶斯推理的另一个特点是它适合于多假设情况。 假设12,,...,n A A A 表示n 个互不相容的穷举假设(即存在具有属性i 的一个目标)为一个事件(或事实,观测等),贝叶斯公式的形式为: 1()() ()()()i i i n j j j P B A P A P A B P B A P A ==∑ (1) 且 ()1n i i P A =∑ 11()()(,)()n n i i i i i P B A P A P B A P B ====∑∑ ()i P A 表示事件12,,...,n A A A 出现的可能性大小,为假设1A 为真的先验概率,这是实验前就已知道的事实。()i P A B 为给定证据B (目标i 存在)条件下,假设1A 为真的后布密度。
2 数据融合中的贝叶斯推理 贝叶斯推理方法可以对多传感器测量数据进行融合,以计算出给定假设为真的后验概率。设有n 个传感器,它们可能是不同类的,他们共同对一个目标进行探测。再设目标有m 个属性需要进行识别,即有m 个假设或命题1,2,...,i A m =。贝叶斯融合算法在实现上分多级进行。在传感器一级,将测量数据依其获取的信息特征与要识别的目标属性联系进行分类,最终给出关于目标属性的一个说明12,,...,n B B B ,它依赖于测量数据和传感器分类法。第二步是计算每个传感器的说明(证据)在各假设为真条件下的似然函数。第三步是依据贝叶斯公司计算多测量证据下各个假设为真的后验概率。最后一步是判定逻辑,以产生属性判定结论,过程如图1所示 传感器1传感器2传感器n P(B1/Aj ) P(B2/Aj)P(Bn/Aj ) 组合贝叶斯公式贝叶斯统计接侧判断逻辑极大后验给定门限的 极大后验等 B1B2B3融合结果 图1 基于贝叶斯推理的数据融合 在第三步中,计算目标身份的融合概率应分两步。首先,计算出假设i A 条件下,n 个证据联合似然函数,当各传感器独立探测时,12,,...,n B B B 相互独立,该联合似然函数为 1212(,,...,)()()...()n j j j n j P B B B A P B A P B A P B A = (2) 然后,应用Bayes 公式得到n 个证据条件下,假设的后验概率k A 121212(,,...,)() (,,...,)(,,...,)n j j j n n P B B B A P A P A B B B P B B B = (3) 第四步一般是采用极大后验判定逻辑,直接选取或判定门限选取具有最大后验联合概率的目
贝叶斯分析
第四章贝叶斯分析 Bayesean Analysis §4.0引言 一、决策问题的表格表示——损失矩阵 对无观察(No-data)问题a=δ 可用表格(损失矩阵)替代决策树来描述决策问题的后果(损失): 或 损失矩阵直观、运算方便 二、决策原则 通常,要根据某种原则来选择决策规则δ,使结果最优(或满意),这种原则就叫决策原则,贝叶斯分析的决策原则是使期望效用极大。本章在介绍贝叶斯分
析以前先介绍芙他决策原则。 三、决策问题的分类: 1.不确定型(非确定型) 自然状态不确定,且各种状态的概率无法估计. 2.风险型 自然状态不确定,但各种状态的概率可以估计. 四、按状态优于: l ij ≤l ik ?I, 且至少对某个i严格不等式成立, 则称行动a j 按状态优于a k §4.1 不确定型决策问题 一、极小化极大(wald)原则(法则、准则) a 1a 2 a 4 min j max i l (θ i , a j ) 或max j min i u ij 例: 各行动最大损失: 13 16 12 14 其中损失最小的损失对应于行动a 3 . 采用该原则者极端保守, 是悲观主义者, 认为老天总跟自己作对. 二、极小化极小 min j min i l (θ i , a j ) 或max j max i u ij 例:
各行动最小损失: 4 1 7 2 其中损失最小的是行动a 2 . 采用该原则者极端冒险,是乐观主义者,认为总能撞大运。 三、Hurwitz准则 上两法的折衷,取乐观系数入 min j [λmin i l (θ i , a j )+(1-λ〕max i l (θ i , a j )] 例如λ=0.5时 λmin i l ij : 2 0.5 3.5 1 (1-λ〕max i l ij : 6.5 8 6 7 两者之和:8.5 8.5 9.5 8 其中损失最小的是:行动a 4 四、等概率准则(Laplace) 用 i ∑l ij来评价行动a j的优劣 选min j i ∑l ij 上例: i ∑l ij: 33 34 36 35 其中行动a1的损失最小五、后梅值极小化极大准则(svage-Niehans) 定义后梅值s ij =l ij -min k l ik 其中min k l ik 为自然状态为θ i 时采取不同行动时的最小损失.
数据融合方法优缺点
数据融合方法 随着交通运行状态评价研究的不断发展,对数据的准确性和广泛覆盖性提出了更高的要求,在此基础上,不同的数据融合模型被引进应用于交通领域中来计算不同检测设备检测到的数据。现阶段,比较常用的数据融合方法主要有:表决法、模糊衰退、贝叶斯汇集技术、BP神经网络、卡尔曼滤波法、D.S理论等方法。 1现有方法应用范围 结合数据融合层次的划分,对数据融合方法在智能交通领域的应用作以下归纳总结: 表数据融合层次及对应的方法 2各种融合方法的优缺点 主要指各种融合方法的理论、应用原理等的不同,呈现出不同的特性。从理论成熟度、运算量、通用性和应用难度四个方面进行优缺点的比较分析,具体内容如下: (1)理论成熟度方面:卡尔曼滤波、贝叶斯方法、神经网络和模糊逻辑的理论已经基本趋于成熟;D—S证据推理在合成规则的合理性方
面还存有异议;表决法的理论还处于逐步完善阶段。 (2)运算量方面:运算量较大的有贝叶斯方法、D.S证据推理和神经网络,其中贝叶斯方法会因保证系统的相关性和一致性,在系统增加或删除一个规则时,需要重新计算所有概率,运算量大;D.S证据推理的运算量呈指数增长,神经网络的运算量随着输入维数和隐层神经元个数的增加而增长;运算量适中的有卡尔曼滤波、模糊逻辑和表决法。 (3)通用性方面:在这六种方法中,通用性较差的是表决法,因为表决法为了迁就原来产生的框架,会割舍具体领域的知识,造成其通用性较差;其他五种方法的通用性相对较强。 (4)应用难度方面:应用难度较高的有神经网络、模糊逻辑和表决法,因为它们均是模拟人的思维过程,需要较强的理论基础;D.S证据推理的应用难度适中,因其合成规则的难易而定:卡尔曼滤波和贝叶斯方法应用难度较低。 3 适用的交通管理事件 之前数据融合技术在交通领域中的应用多是在例如车辆定位、交通事件识别、交通事件预测等交通事件中,但是几乎没有数据融合技术在交通运行状态评价的应用研究,而本文将数据融合技术应用在交通运行状态评价中,为了寻找到最适用于交通运行状态评价的数据融合技术方法,有必要将之前适用于其它交通管理事件的数据融合技术进行评价比较。 表2 各种融合方法适用的交通管理事件的比较
选修2-2 第二章 推理与证明(B)
实用文档 选修2-2 第二章 推理与证明(B) 一、选择题 1、某人在上楼梯时,一步上一个台阶或两个台阶,设他从平地上到第一级台阶时有f (1) 种走法,从平地上到第二级台阶时有f (2)种走法,……则他从平地上到第n (n ≥3)级台阶 时的走法f (n )等于( ) A .f (n -1)+1 B .f (n -2)+2 C .f (n -2)+1 D .f (n -1)+f (n -2) 2、已知扇形的弧长为l ,半径为r ,类比三角形的面积公式:S =底×高2 ,可推知扇形面 积公式S 扇等于( ) A.r 22 B.l 22 C.lr 2 D .不可类比 3、设凸n 边形的内角和为f (n ),则f (n +1)-f (n )等于( ) A .n π B.(n -2)π
C.π D.2π 4、“∵四边形ABCD是矩形,∴四边形ABCD的对角线相等.”以上推理的大前提是 ( ) A.正方形都是对角线相等的四边形 B.矩形都是对角线相等的四边形 C.等腰梯形都是对角线相等的四边形 D.矩形都是对边平行且相等的四边形 5、设f(x)是定义在正整数集上的函数,且f(x)满足:“当f(k)≥k2成立时,总可推出 f(k+1)≥(k+1)2成立”,那么,下列命题总成立的是( ) A.若f(3)≥9成立,则当k≥1时,均有f(k)≥k2成立 B.若f(5)≥25成立,则当k≤5时,均有f(k)≥k2成立 C.若f(7)<49成立,则当k≥8时,均有f(k) 实用文档 6、已知p =a +1 a -2 (a >2),q =2-a 2+4a -2 (a >2),则( ) A .p >q B .p 一、背景介绍: 多传感器数据融合是一种信号处理、辨识方法,可以与神经网络、小波变换、kalman 滤波技术结合进一步得到研究需要的更纯净的有用信号。 多传感器数据融合涉及到多方面的理论和技术,如信号处理、估计理论、不确定性理论、最优化理论、模式识别、神经网络和人工智能等。多传感器数据融合比较确切的定义可概括为:充分利用不同时间与空间的多传感器数据资源,采用计算机技术对按时间序列获得的多传感器观测数据,在一定准则下进行分析、综合、支配和使用,获得对被测对象的一致性解释与描述,进而实现相应的决策和估计,使系统获得比它的各组成部分更充分的信息。 多传感器信息融合技术通过对多个传感器获得的信息进行协调、组合、互补来克服单个传感器的不确定和局限性,并提高系统的有效性能,进而得出比单一传感器测量值更为精确的结果。数据融合就是将来自多个传感器或多源的信息在一定准则下加以自动分析、综合以完成所需的决策和估计任务而进行的信息处理过程。当系统中单个传感器不能提供足够的准确度和可靠性时就采用多传感器数据融合。数据融合技术扩展了时空覆盖范围,改善了系统的可靠性,对目标或事件的确认增加了可信度,减少了信息的模糊性,这是任何单个传感器做不到的。 实践证明:与单传感器系统相比,运用多传感器数据融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。信号级融合方法最简单、最直观方法是加权平均法,该方法将一组传感器提供的冗余信息进行加权平均,结果作为融合值,该方法是一种直接对数据源进行操作的方法。卡尔曼滤波主要用于融合低层次实时动态多传感器冗余数据。该方法用测量模型的统计特性递推,决定统计意义下的最优融合和数据估计。 多传感器数据融合虽然未形成完整的理论体系和有效的融合算法,但在不少应用领域根据各自的具体应用背景,已经提出了许多成熟并且有效的融合方法。多传感器数据融合的常用方法基本上可概括为随机和人工智能两大类,随机类方法有加权平均法、卡尔曼滤波法、多贝叶斯估计法、产生式规则等;而人工智能类则有模糊逻辑理论、神经网络、粗集理论、专家系统等。可以预见,神经网络和人工智能等新概念、新技术在多传感器数据融合中将起到越来越重要的作用。 数据融合存在的问题 (1)尚未建立统一的融合理论和有效广义融合模型及算法; (2)对数据融合的具体方法的研究尚处于初步阶段; (3)还没有很好解决融合系统中的容错性或鲁棒性问题; (4)关联的二义性是数据融合中的主要障碍; (5)数据融合系统的设计还存在许多实际问题。 二、算法介绍: 2.1多传感器数据自适应加权融合估计算法: 设有n 个传感器对某一对象进行测量,如图1 所示,对于不同的传感器都有各自不同的加权因子,我们的思想是在总均方误差最小这一最优条件下,根据各个传感器所得到的测量值以自适应的方式寻找各个传感器所对应的最优加权因子,使融合后的X值达到最优。 高二数学选修2-2第二章推理与证明 1、 下列表述正确的是( ). ①归纳推理是由部分到整体的推理;②归纳推理是由一般到一般的推理;③演绎推理是由一般到特殊的推理;④类比推理是由特殊到一般的推理;⑤类比推理是由特殊到特殊的推理. A .①②③; B .②③④; C .②④⑤; D .①③⑤. 2、下面使用类比推理正确的是 ( ). A.“若33a b ?=?,则a b =”类推出“若00a b ?=?,则a b =” B.“若()a b c ac bc +=+”类推出“()a b c ac bc ?=?” C.“若()a b c ac bc +=+” 类推出“ a b a b c c c +=+ (c ≠0) ” D.“n n a a b =n (b )” 类推出“n n a a b +=+n (b )” 3、 有一段演绎推理是这样的:“直线平行于平面,则平行于平面内所有直线;已知直线 b ?/平面α,直线a ≠ ?平面α,直线b ∥平面α,则直线b ∥直线a ”的结论显然是错误的, 这是因为 ( ) A.大前提错误 B.小前提错误 C.推理形式错误 D.非以上错误 4、用反证法证明命题:“三角形的内角中至少有一个不大于60度”时,反设正确的是( )。 (A)假设三内角都不大于60度; (B) 假设三内角都大于60度; (C) 假设三内角至多有一个大于60度; (D) 假设三内角至多有两个大于60度。 5、在十进制中01232004410010010210=?+?+?+?,那么在5进制中数码2004折合成十进制为 ( ) A.29 B. 254 C. 602 D. 2004 6、利用数学归纳法证明“1+a +a 2+…+a n +1=a a n --+112 , (a ≠1,n ∈N)”时,在验证n=1 成立时,左边应该是 ( ) (A)1 (B)1+a (C)1+a +a 2 (D)1+a +a 2+a 3 7、某个命题与正整数n 有关,如果当)(+∈=N k k n 时命题成立,那么可推得当1+=k n 时 用于运动识别的聚类特征融合方法和装置 提供了一种用于运动识别的聚类特征融合方法和装置,所述方法包括:将从被采集者的加速度信号 中提取的时频域特征集的子集内的时频域特征表示成以聚类中心为基向量的线性方程组;通过求解线性方程组来确定每组聚类中心基向量的系数;使用聚类中心基向量的系数计算聚类中心基向量对子集的方差贡献率;基于方差贡献率计算子集的聚类中心的融合权重;以及基于融合权重来获得融合后的时频域特征集。 加速度信号 →时频域特征 →以聚类中心为基向量的线性方程组 →基向量的系数 →方差贡献率 →融合权重 基于特征组合的步态行为识别方法 本发明公开了一种基于特征组合的步态行为识别方法,包括以下步骤:通过加速度传感器获取用户在行为状态下身体的运动加速度信息;从上述运动加速度信息中计算各轴的峰值、频率、步态周期和四分位差及不同轴之间的互相关系数;采用聚合法选取参数组成特征向量;以样本集和步态加速度信号的特征向量作为训练集,对分类器进行训练,使的分类器具有分类步态行为的能力;将待识别的步态加速度信号的所有特征向量输入到训练后的分类器中,并分别赋予所属类别,统计所有特征向量的所属类别,并将出现次数最多的类别赋予待识别的步态加速度信号。实现简化计算过程,降低特征向量的维数并具有良好的有效性的目的。 传感器 →样本及和步态加速度信号的特征向量作为训练集 →分类器具有分类步态行为的能力 基于贝叶斯网络的核心网故障诊断方法及系统 本发明公开了一种基于贝叶斯网络的核心网故障诊断方法及系统,该方法从核心网的故障受理中心采集包含有告警信息和故障类型的原始数据并生成样本数据,之后存储到后备训练数据集中进行积累,达到设定的阈值后放入训练数据集中;运用贝叶斯网络算法对训练数据集中的样本数据进行计算,构造贝叶斯网络分类器;从核心网的网络管理系统采集含有告警信息的原始数据,经贝叶斯网络分类器计算获得告警信息对应的故障类型。本发明,利用贝叶斯网络分类器构建故障诊断系统,实现了对错综复杂的核心网故障进行智能化的系统诊断功能,提高了诊断的准确性和灵活性,并且该系统构建于网络管理系统之上,易于实施,对核心网综合信息处理具有广泛的适应性。 告警信息和故障类型 →训练集 —>贝叶斯网络分类器 数据融合各种算法及数学知识汇总 粗糙集理论 理论简介 面对日益增长的数据库,人们将如何从这些浩瀚的数据中找出有用的知识? 我们如何将所学到的知识去粗取精?什么是对事物的粗线条描述什么是细线条描述? 粗糙集合论回答了上面的这些问题。要想了解粗糙集合论的思想,我们先要了解一下什么叫做知识?假设有8个积木构成了一个集合A,我们记: A={x1,x2,x3,x4,x5,x6,x7,x8},每个积木块都有颜色属性,按照颜色的不同,我们能够把这堆积木分成R1={红,黄,蓝}三个大类,那么所有红颜色的积木构成集合X1={x1,x2,x6},黄颜色的积木构成集合X2={x3,x4},蓝颜色的积木是:X3={x5,x7,x8}。按照颜色这个属性我们就把积木集合A进行了一个划分(所谓A的划分就是指对于A中的任意一个元素必然属于且仅属于一个分类),那么我们就说颜色属性就是一种知识。在这个例子中我们不难看到,一种对集合A的划分就对应着关于A中元素的一个知识,假如还有其他的属性,比如还有形状R2={三角,方块,圆形},大小R3={大,中,小},这样加上R1属性对A构成的划分分别为: A/R1={X1,X2,X3}={{x1,x2,x6},{x3,x4},{x5,x7,x8}} (颜色分类) A/R2={Y1,Y2,Y3}={{x1,x2},{x5,x8},{x3,x4,x6,x7}} (形状分类) A/R3={Z1,Z2,Z3}={{x1,x2,x5},{x6,x8},{x3,x4,x7}} (大小分类) 上面这些所有的分类合在一起就形成了一个基本的知识库。那么这个基本知识库能表示什么概念呢?除了红的{x1,x2,x6}、大的{x1,x2,x5}、三角形的{x1,x2}这样的概念以外还可以表达例如大的且是三角形的 {x1,x2,x5}∩{x1,x2}={x1,x2},大三角{x1,x2,x5}∩{x1,x2}={x1,x2},蓝色的小的圆形({x5,x7,x8}∩{x3,x4,x7}∩{x3,x4,x6,x7}={x7},蓝色的或者中的积木{x5,x7,x8}∪{x6,x8}={x5,x6,x7,x8}。而类似这样的概念可以通过求交运算得到,比如X1与Y1的交就表示红色的三角。所有的这些能够用交、并表示的概念以及加上上面的三个基本知识(A/R1,A/R2.A/R3)一起就构成了一个知识系统记为R=R1∩R2∩R3,它所决定的所有知识是 A/R={{x1,x2},{x3,x4},{x5},{x6},{x7},{x8}}以及A/R中集合的并。 下面考虑近似这个概念。假设给定了一个A上的子集合X={x2,x5,x7},那么用我们的知识库中的知识应该怎样描述它呢?红色的三角?****的大圆? 都不是,无论是单属性知识还是由几个知识进行交、并运算合成的知识,都不能得到这个新的集合X,于是我们只好用我们已有的知识去近似它。也就是在所有的现有知识里面找出跟他最像的两个一个作为下近似,一个作为上近似。于是我们选择了“蓝色的大方块或者蓝色的小圆形”这个概念: {x5,x7}作为X的下近似。选择“三角形或者蓝色的”{x1,x2,x5,x7,x8}作为它的上近似,值得注意的是,下近似集是在那些所有的包含于X的知识库0,则1a +1b +1c 的值( ) A .一定是正数 B .一定是负数 C .可能是零 D .正、负不能确定 8、如果x >0,y >0,x +y +xy =2,则x +y 的最小值是( ) A.32 B .23-2 C .1+ 3 D .2-3 9、设f (n )=1n +1+1n +2+…+1 2n (n ∈N *),那么f (n +1)-f (n )等于( ) A.12n +1 B.1 2n +2
多传感器数据融合算法.
高二数学选择进修2-2第二章推理与证明
贝叶斯分类多实例分析总结
数据融合各种算法整理汇总
第二章 推理与证明(A)