能量法
第十章能量法
承载的构件或结构发生变形时,加力点的位置都要发生变化,从而使载荷位能
减少。如果不考虑加载过程中其他形式的能量损耗,根据机械能守恒定律,减少了
的载荷位能将全部转变为应变能储存于构件或结构内。据此,通过计算构件或结构
的应变能,可以确定构件或结构加力点处沿加力方向的位移。
但是,机械能守恒定律难以确定构件或结构上任意点沿任意方向的位移,也不
能确定构件或结构上各点的位移函数。应用更广泛的能量方法,不仅可以确定构件
或结构上加力点处沿加力方向的位移,而且可以确定构件或结构上任意点沿任意方
向的位移;不仅可以确定特定点的位移,而且可以确定梁的位移函数。
本章介绍的是:用应变能的概念,根据能量守恒原理来解决与弹性结构或构件
变形有关问题的一般方法,这种方法称为能量法。能量法既可用于计算构件或结构
位移;也可用以解决静不定问题及其它一些问题;本章只讨论用能量方法计算位移。
§10.1 杆件的应变能计算
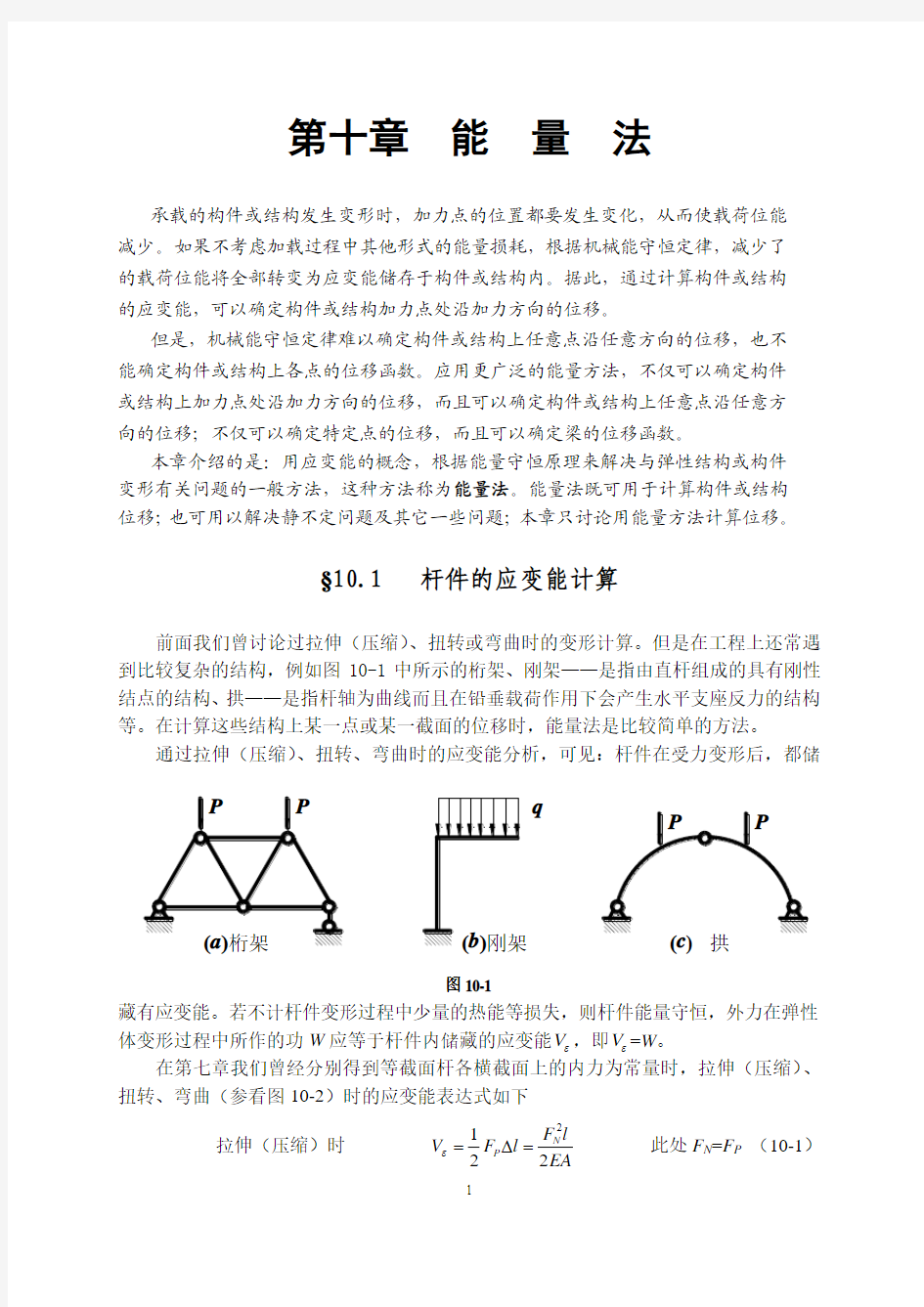
前面我们曾讨论过拉伸(压缩)、扭转或弯曲时的变形计算。但是在工程上还常遇到比较复杂的结构,例如图10-1中所示的桁架、刚架——是指由直杆组成的具有刚性结点的结构、拱——是指杆轴为曲线而且在铅垂载荷作用下会产生水平支座反力的结构等。在计算这些结构上某一点或某一截面的位移时,能量法是比较简单的方法。
通过拉伸(压缩)、扭转、弯曲时的应变能分析,可见:杆件在受力变形后,都储藏有应变能。若不计杆件变形过程中少量的热能等损失,则杆件能量守恒,外力在弹性
体变形过程中所作的功W应等于杆件内储藏的应变能V
ε,即V
ε
=W。
在第七章我们曾经分别得到等截面杆各横截面上的内力为常量时,拉伸(压缩)、扭转、弯曲(参看图10-2)时的应变能表达式如下
拉伸(压缩)时
2
1
22
N
P
F l
V F l
EA
ε
=?=此处F N=F P(10-1)
圆轴扭转时 21
22x P P
M l V M GI ε?== 此处M x =M P (10-2)
平面弯曲时 2122P M l
V M EI
εθ== 此处M =M P (10-3)
综合以上三个表达式中外力表达的部分,可以把应变能概括地写为
1
2
V W F εδ==
(10-4) 式中 F ——在拉伸(压缩)时表示拉力(压
力),在扭转或弯曲时表示集中力偶,所以此处F 称为广义力;
δ——在广义力作用处与广义力F 相应的位移,称为广义位移,在拉伸(压缩)时它是与拉力(压力)相应的位移l ?,在扭转时它是与扭转力偶矩相应的转角φ,在平面弯曲时它是与弯曲力偶矩相应的截面转角θ(如图2所示)。 倘若构件或结构上作用着若干个广义力F i (i =1、2、 、n ),由这些广义力共同引起的广义位移为δi (i =1、2、 、n ),则此时也可以从广义力所作的功来求应变能:由于外力所作功W 或应变能V ε均可证明与加载顺序无关,而只
与各载荷最终值有关(见例10-1);故在求上述
应变能V ε时,可认为各载荷F i ,均同时从零开始
按同一比例增长到最终值。当构件或结构上的广义位移δi 与广义力F i 成正比时,在这种加载方式下,构件或结构内的应变能可用每一广义力在其作用点的广义位移上所作的功的和来计量,即
11221
11112222n
n n i i i V W F F F F εδδδδ===+++=∑ (10
5)- 由于杆件处于线性弹性(即材料符合虎克定律,力与变形成正比)的情况下,广义力与
广义位移之间应该有成正比例的关系,设其比例系数为ci,则
i i i F c δ=
将其代入式(10-1) 可得
22
111122i n n i i i i i
F V W c c εδ=====∑∑
(106- 上式表明杆件的应变能与外力功都是广义力Fi的二次齐次函数,所以对功或应变能来
说,在一般情况下力的作用独立性原理已不再成立,也就不能再用叠加法进行计算。由于i c 是比例系数,故由式(103)-可见应变能总是正值。
例101- 如图10-3所示,有一简支梁,跨中C 点受有集中力P F ,左支座上作用有
弯曲力偶矩0M ,试计算此梁与弯曲变形相应的应变能。
解: (1)若P F 与0M 同时作用,并由零逐渐增加到这一数值。由挠度表可直接查得跨中和左端支座截面处由于P F 、0M 分别作用时所引起的位移,再利用叠加法即得
2
3200,
4816163P P C A M l M l F l F l y EI EI EI EI
θ=+=+
由于力与位移方向一致,所以将此位移代人式(10-5)时应取正值,从而得
2
2230
001112296616P P P C A M l M F l F l V W F y M EI εθ??==+=++ ???
(2)假定先作用集中力P F ,然后再加0M ,如图10-4,则集中力所作功为
32311224896P P P F P CP P F l F l W F y F EI EI
===
且在再加力偶0M 的过程中外力作功为
0002
20
0,01122316P
M F AM P CM P M l M l W M F y F EI EI
θ=+=+ 上式的第二项是力P F 在跨中C 点位移0CM y (由力偶0M 所引起的)所作的功;由于这一过程中,P F 之值不变,所以所作功为0P CM F y 而没有系数
1
2
。 于是总的应变能为
0222300,196616P P
P P F M F M l M F l F l V W W W EI ε??==+=++ ???
以上两种不同加载顺序下所得结果完全相同;由此可见,应变能的数值只与
所受载荷(P F ,0M )的最终值有关,与加载的顺序无关。同时,由于存在2
016
P M F l ,
可见P F 与0M 引起的变形对它们作的功是互相影响的,所以对功或应变能来说,力的作用独立性原理不再成立,因而也就在计算时不能应用叠加法。
现验证如下:
在按叠加法计算时,须分别计算此梁在P F 与0M 各自单独作用下的应变能,然后求和,其结果应为
(x )
图10-5
0022232300011
22
11124823966P P CF AM P P P V W F y M M l M l F l F l F M EI EI EI εθ==
+??
=?+?=+ ???
显然这比上面结果少了2
016P M F l EI
这一项;这就说明了,在计算外力作功或应变能时不能
应用叠加法。
由上面的例题可见:当所求杆件的外力与外力作用处的位移已知时,此杆件的应变能可以比较简便地算出。但是,如果位移是尚待求出的未知量,就不能按上面讲的方法求应变能了;此时,必须用到广义内力(F N 、M x 、F Q 、M )来表达应变能公式,再通过内力与外力的关系,得出应变能与外力的关系式。由于无论外力多么复杂,内力分量只有F N 、M x 、F Q 、M 四种,下面仅就弯曲变形为例,讨论如何以M 表达弯曲应变能。
如图10-5所示,若杆件的截面上的内力M 沿杆件
长度是改变的,即M =M (x ),可以把杆件分成长度为d x 的微分段,在这个微分段的两个端截面上的内力的
改变dM (x )可以忽略不计,因此可以利用式(10-3)表示这个微分段的应变能
2()2M x dx
dV dW EI
ε==
全杆的应变能应由积分来得出为
2()2l
M x dx
V W EI ε==? (10-7) 同理,可以分别求得当杆件截面上的内力F N 、M x 、F Q 沿杆长改变时,全杆的应变
能为
2()2N l
F x dx V W EA
ε==?
(10-8)
2()2x P l
M x dx
V W GI ε==? (10-9) 2()2Q l
F x dx V W k
GA
ε==? (10-10)
式中,k —是与截面形状、尺寸有关的系数,对于矩形截面为1.2,圆截面为1.185,
薄壁圆环截面2,工字形截面为1.176。
在杆件处于组合变形的情况下,截面上将同时出现几种内力,如图10-6所示,若微分段dx 的两端截面上有内力(对微分段杆而言,它们都是外力)F N (x )、F Q (x )、M x (x )、M (x ),若杆件在小变形的情况下,则对于微分段d x 每一种内力仅对它相应的位移作功,而对其它位移不作功。例如:轴力F N 与剪力F Q 引起的变形相互垂直,剪
B
图10-7
力F Q 与轴力F N 引起的变形垂直,扭矩M x 与弯矩M 引起的转角d θ互相垂直,弯矩M 与扭矩M x 引起的扭转角d ?也互相垂直,所以相应的F N (x )、F Q (x )、M (x )、M x (x )对这些位移均不作功。于是,在微分段dx 上作用的力和力偶所作的总功为
22
221111
()()()()()2222
()()()()122222N x Q Q N x P dW F x dx M x d M x d kF x dy F x dx F x dx M x dx M x dx k
EA EI GI GA
θ?=
??+?+?+?=+++ 由于V ε=W ,故d V ε=d W ,因而将上式对杆件全长积分后,即可得杆件在组合变形时总的应变能为
22
22()()()()2222Q N x P l l l l
kF x dx
F x dx M x dx M x dx V EA EI GI GA ε=+++????
(10-11) 式中,第三项扭转应变能是对圆截面杆推导的。
值得注意的是:对于跨度较大的梁,剪切应变能与弯曲应变能比较数值很小,一般可以
忽略不计。
例10-2 如图10-7所示简支梁,跨中受集
中力F P 作用,梁的抗弯刚度为EI ,并且为常量。试求此梁的弯曲应变能。
解:(1)梁的支反力:2
P
A B F F F ==
(2)梁的弯矩方程:选定每一段的坐标原点如图10-7中所示。
AC 段:111
1()(0)22P A F l
M x F x x x ==≤≤ BC 段: 222
21
()(0)22
P B F M x F x x x ==≤≤ (3)弯曲应变能:由式(10-7)得
()()2
22222
2231212120
000()()228896l
l l l
P P P F x F x M x dx M x dx F l V dx dx EI EI EI EI EI
ε=+=+=
?
??? 如果直接按外力功计算应变能可得
1
2
P P F V F εδ=
由挠度表(附录Ⅳ)可以查得
348P
P F
F l EI
δ= 由于F P 与P F δ同向,于是
3231
24896P P P F l F l V F EI EI
ε=?=
由此可见:按外力功或内力功计算应变能的结果
完全相同,但后者无需预先知道相应的位移。 例10-3 如图10-8所示悬臂梁,自由端有F P 及M 0共同作用,梁的抗弯刚度EI 且为常量。试求此梁的弯曲应变能。
解:(1)梁的弯矩方程
0()P M x M F x =-
(2)弯曲应变能:由式(10-7)得
2
2223200000()()22226l
l P P P M F x M l F M l F l M x dx V dx EI EI EI EI EI
ε-===-+??
如果直接按外力功(式(10-5))计算应变能可得
011
22
P B B V F y M εθ=+
利用挠度表(附录Ⅳ)可以查得
2
3032P B M l F l y EI EI =-
2
02P B M l F l EI EI
θ=-+
因为 011
22
P B B V F y M εθ=+ 以及力F P 与B y 中的正号部分同向、与其负号部分反向;而0M 与B θ中正号部分反
向、与其负号部分同向,故
2320002223001
1()()
23222226P P P P P M l M l F l F l V F M EI EI EI EI
M l F M l F l EI EI EI
ε=-+-=-+
由此可见,按内力计算应变能或按外力功计算结果完全相同。但用内力计算时不需要先求出杆的位移,比较简便。
§10.2 单位载荷法
用能量法计算结构位移的方法有许多种,单位载荷法(又称单位力法,莫尔法)是
广泛采用的方法之一。下面首先从梁的弯曲引起的位移来推出这种方法,然后再推广到其它的位移情况。
设梁在F P 1、F P 2……作用下发生弯曲变形如图10-9a 。设沿载荷F P 1、F P 2……方向的位移分别为1δ、2δ……,则载荷F P 1、F P 2……分别在1δ、2δ……上作功,因此梁内储存了应变能V ε,按照式(10-7)
2()2l M x dx V EI
ε=? (a )
式中,M (x )——是在F P 1、F P 2……共同作用下梁任一截面上的弯矩,即梁的弯矩方程。积分范围应该是整个梁长l 。
现在我们来求在上述载荷作用下,梁轴线上任一点C 的挠度y 。
如图10-9b 所示,仍为此梁,我们设想先在C 点沿挠度y 的方向施加一单位载荷
1X =,沿单位载荷1X =方向的位移是0δ,
对于此图中所示梁,按式(10-7)可得出应变能为
2
0()2l M x dx
V EI
ε=? (b ) 式中()M x ——是在单位力1X =单独作用下梁任一截面上的弯矩,即在单位力1X =单
独作用下梁的弯矩方程。
再看图10-9c ,如果在此梁上,先加单位力1X =,然后加F P 1、F P 2……。先加单位载荷 1X =,梁将发生变形,如图10-9c 中虚线所示,此时梁的应变能是V ε0。在此变形的位置上再加载荷F P 1、F P 2……,梁将进一步变形,由图中虚线位置移到实线位置。在材料符合虎克定律,变形很小的情况下,各载荷之间符合互不影响的力的作用独立性原理,因而图10-9c 中从虚线到实线的情况就等于图10-9a 中由F P 1、F P 2……所引起的变形的情况。于是梁因载荷F P 1、F P 2……作用所产生的应变能V ε,不因预先作用1X =而改变,仍是用(a )式来表示。此外,因为在C 点已经有1X =作用着,且因其方向与挠度y 方向一致,于是在载荷F P 1、F P 2……的作用过程中,单位力1X =又完成了数量为
X y ?的功。因为V ε=W ,故由于单位力1X =的存在和载荷F P 1、F P 2……所引起的变形
而增加的那一部分应变能也等于X y ?。所以按先作用单位力1X =,然后加载荷F P 1、F P 2……的方式,梁内的总的应变能应为
V ε1=V ε0+V ε+X y ? (c )
从另一方面考虑,当此梁在载荷F P 1、F P 2……作用下的最后位置上,梁的弯矩方程应为()()M x M x +,
这里()M x 与()M x 分别为载荷F P 1、F P 2……引起的弯矩和单位载荷1X =引起的弯矩,于是由式(10-7),梁内总的应变能又可写为
2
1()()2l M x M x dx
V EI
ε??+??=? (d )
由(c )、(d )两式知
V ε0+V ε+X y ?=2
22()()()()()()222l l l l M x M x dx M x dx M x M x dx M x dx EI EI EI EI
??+?
?=++???? (e ) 从(e )式中减去(a )式和(b )式,得到
X y ?=()()l M x M x dx
EI
?
(f )
现将1X =代人,于是(f )式可改写为
1?y =()()l M x M x dx
EI
?
(10-12)
此式就是计算梁挠度的莫尔定理,又称莫尔积分法。由于用了单位载荷,故这种求位移的方法又称为单位载荷法或单位力法。注意:作此积分时()M x 、()M x 应按弯矩的符号规定给以正负号。如上式右端积分结果为正,说明单位载荷所作的功1?y 为正,即载荷引起的挠度y 与单位载荷的方向一致;如积分结果为负,则说明挠度y 的方向与单位载荷的方向相反。
以上讨论的是,求梁轴线上任一点C 的挠度。如果要求梁上任一截面的转角θ,则仿照上面完全相同的步骤,在该截面处加一单位力偶1X =,仍用()M x 表示单位力偶引起的弯矩,又可得到
1?()()l M x M x dx
EI
θ=?
(10-13)
式中()M x 仍为载荷作用下梁任一截面上的弯矩。
对于刚架,一般在求位移时只考虑弯曲变形,故以上两式仍然适用,但积分应对每一杆进行,然后求和;若将y 或θ统一地用?表示,则对于刚架应有
1?1()()i
n
i i l i i i
M x M x dx
E I =?=∑?
(10-14)
式中 i =1,2, ,n 为刚架中杆件的号码,n 为杆的总数。
对于桁架结构,如果需要求某一节点沿某一方向的位移?,则在该节点上沿该位移
方向加一单位载荷1X =,仿照上面推导式(10-13)的步骤,可以得到
1?1n
Ni Ni i
i i i
F F l E A =?=∑
(10-15) 式中 i =1,2, ,n 为桁架中杆件的号码,n 为杆的总数; F Ni ——在载荷作用下第i 杆的轴力;
Ni F ——在单位载荷1X =作用下第i 杆的轴力;
Ni F 、Ni F 均应有正负号,正号表示拉力,负号表示压力; i i E A ——第i 杆的抗拉(压)刚度。
单位载荷法还可以应用于组合变形的情况,由于所得的结果与以上公式完全相似,这里就不再推导。
应用单位荷载法计算位移一般需按如下步骤进行:
(1)根据所要求的广义位移,确定对应的单位广义力,建立单位广义力状态。即在需求广义位移的截面处加单位广义力X =1:若要求的位移是梁中某截面处的挠度,就在该截面处加一单位集中力X =1;若要求的位移是梁中某截面的转角,就在该截面处沿转动方向加一单位集中力偶X =1;若要求的位移是结构中某相邻两个截面的相对移动,就在这两个截面处沿相对移动方向各加一个单位集中力X =1;若要求的位移是梁中某两个截面的相对转角,就在该两截面处沿相对转动方向各加一个单位集中力偶X =1。
(2)分别作出结构在真实荷载作用下的内力图(即F NP 、F QP 、M P 、M xP 图)和单位广义力产生的内力图(即图、、、x Q N M M F F )
。 (3)用式(10-12)~(10-15)计算所要求的位移(符合图乘条件时,用图乘代替积分)。
(4)认真校核每一步。需要特别强调的是:初学者往往在做公式计算题时遗忘刚度(EA 、EI 、GA )等,而做数值计算题时又往往单位不统一。必须注意避免出现这些情况。
例10-4 图10-10a 所示的简支梁受均布载荷作用,已知载荷集度q ;梁 的抗弯刚度EI 是常量。试用单位载荷法求梁跨中C 点的挠度和端截面B 的转角。
解: (一) 先求跨中挠度y C :在C 点加单位载荷11X =,如图10-10b 所示。其余步骤如下:
(1)求支座反力
载荷引起的支座反力: ,2
2A B ql
ql F F =
=
单位载荷引起的支座反力: 1
1,
2
2
A B F F ==
(2)列弯矩方程
2
21()(0)222
A qlx qx M x F x ql x l =-=-
≤≤
1
(0/2)2
()1(/2)()(/2)
2
A A x F x x l M x F x X x l l x l x l ?
=≤≤??=???+?-=-≤≤??
(3)代入式(10-12)求y C : 由于梁上的均布载荷与单位载荷对跨中都是对称的,所以在莫尔积分中的上限和下限,可取由0到l /2,然后乘2.这样
2
2
24
()()2
522
22384l
l
C M x M x dx qlx qx x ql y dx EI EI
EI ????==
-=
? ??????
?
计算结果为正值,表示y C 的方向与所加单位载荷11X =的方向一致。
(二) 再求B 端截面的转角: 在B 端加单位力偶21X =,如图10-10c 。 (1)求单位载荷引起的支座反力与弯矩方程
1
1,
A B F F l
l =-= ; ()(0)
A x M x F x
x l l
==-≤≤ (2)代入式(10-13)求B θ: 利用前面的M (x )及上一行的()M x 得
()23
00()()1
2
224l
l
B M x M x dx qlx qx x ql dx EI EI
l EI θ????==
--=- ? ??????? 逆钟向
B θ为负值,表示B θ的转向与单位
力偶21X =的转向相反,即截面B 的转角为逆时针转向。
例10-5 求图10-11a 所示刚架C 点的水平位移,q 为均布载荷集度,EI 为常量。
解: 在C 点加单位载荷
1X =如图10-11b 所示。
由图10-11a 、b 可见,在列
BC 、AB 杆的弯矩方程时,若分别以C 、B 为原点,可以不求支座反力。
(1)列弯矩方程
2
111()(0)2
qx M x x a =-
≤≤; 2
22()(0)2
qa M x x h =-
≤≤
11()0
(0)M x x a =≤≤; 222()(0)M x x x h =-≤≤
(2)代入式(10-14)求C ?水平。
C ?水平=
12121()()()()BC AB M x M x dx M x M x dx EI
?
?+???? 将上面(1)的结果代入,得
C ?水平=()222
2201
024h
qa qa h x dx EI
EI ??+
--= ???
? 结果得正值,表明C ?水平的方向与所加单位载荷的方向相同,即向右。
例10-6 应用单位载荷法求图10-12a 所示刚架上C 点的水平位移C δ和转角C θ。各杆的抗弯刚度均为EI 。
解: (一)先求水平位移C δ:在C 点加单位载荷1X =1,如图10-12b 所示。 (1)求支座反力
载荷引起的支座反力: ,;
P
P
Ax P Ay C F F F F F F =-=-
=
单位载荷引起的支座反力: 1,1;1A x A y
C
F F
F
=-=-=
(2)列弯矩方程 选各杆的原点如图10-12中所示。 CB 段1(0)x l ≤≤
1
111111(),()12
P C C F x M x F x M x F x x x ==
===
AD 段22(0)l x ≤≤
2222222(),
()1Ax Ax P M x F x F x M x F x x x =-==-==
DB 段23()l x l ≤≤
(
)
223333(),()2
2
P Ax Ax P F l l
M x F x F x M x F x x =---=
=-=
(3)代入式(10-14)求C δ
223
/2331122
00/21
()()32228i n
l l l i P P P P C l i M x M x dx F lx dx F x dx F x dx F l EI EI EI EI EI δ===++=∑????
计算结果为正值,表示y C 的方向与所加单位载荷F 的方向一致,即水平向右。
(二) 再求转角C θ: 在C 点加一单位力偶2X =1,如图10-12c 。 (1)求单位力偶引起的支座反力
11
0,;Ax Ay C F F F l l
==
=- ; (2)单位力偶引起的弯矩方程 CB 段1(0)x l ≤≤
1
121()1C x M x X F x l
'=+=-
AD 段22(0)l x ≤≤: 2()0M x = DB 段23()l x l ≤≤: 3()0M x = (3)代入式(10-14)求C θ
21101
()()1()()0012i
n
l i i P C l i M x M x dx F l M x M x dx EI EI EI θ=??==++=
?
???∑?
? C θ为正值,表示C θ的转向与单位力偶2X 的转向相同,即截面C 的转角为逆时针转向。
例10-7 图10-13a 、c 为一等截面悬臂曲梁,梁轴线为1/4圆弧。若弹性常数和截面的几何性质E 、G 、A 、I 均已知。试求在图示荷载F P 作用下自由端A 的竖向位移Ay Δ和均布水压q 作用下自由端A 的水平位移Ax Δ。
解. 当曲杆的曲率不大时,可用直杆公式计算位移,其误差并不大。大量实际计算结果表明,当杆轴曲率半径大于截面高度的5倍时,曲率对位移的影响不超过0.3%。因此,本例按式(10-12)计算。
为求图10-13a 中点A 的竖向位移,需在该点施加一个竖向单位力X=1如图b 所示。
利用图示分离体平衡条件,可得内力方程如下
对图10-10a :
0,cos(90)0=-sin ix NP P NP P F F F F F θθ'
=+?-=∑得 0,
cos 0
=cos iy QP P QP P F F F F F θθ'=+=∑得
()0,
sin 0
=-sin O
i P P P P M
F M F R M F R θθ=+=∑得
对图10-13b :
0,1cos(90)0=-sin N N ix F F F θθ'=+??-=∑得 0,
1cos 0
=cos Q Q iy F F F θθ'=+=∑ 得
()0,
1sin 0
=-sin O
i M
F M R M R θθ=+=∑ 得
利用位移计算公式(10-12),则有
()9090003
900(-sin )(-sin )cos cos =++=++
(-sin )(-sin )+=++444N Q P P Ay F F M s P P P P s F F Rd Rd EA GA
R F R F R F R F R Rd EI EA GA EI
θθθθ
θαθθθπππθα?
???????↓??? 式中FN Δ、FQ Δ、M Δ分别表示轴力、剪力、弯矩引起的位移;计算结果为正,表示点A 竖向位移的方向与所加单位力方向相同。反之,表示点A 竖向位移的方向与所加单位力方向相
反。若该曲梁是高度为h 的矩形截面钢筋混凝土梁,则G ≈0.4E ,I/A=h 2/12,又设h /R =1/10,则FQ Δ/M Δ<1/400,FN Δ/M Δ<1/1200。由此可见,对于细长的受弯杆件,剪切和轴向变形对位移的影响很小,可以略去不计。这就是式(10-12)中
只有弯矩项的原因。由于可以忽略剪力和轴力的影响,因此,在求图10-13c 的水平位移时,只需建立荷载与单位力的弯矩方程。对于图c 、d 所示
的分离体,由力矩平衡条件易知
对图10-13c :
20
()=0,
+()cos(-)=0
=-sin O i P P M F M q Rd R M qR θ
??θ?θ∑?得
对图10-13d :
()=0,
+1R(1-cos )=0
=-(1-cos )O
i M
F M M R θθ∑ 得
将其代入位移计算公式可得
[]()4
902
1=
(-sin )-(1-cos )=
2Ax qR qR R Rd EI
EI
θθθ?
?→?
。 ?
例10-8 如图8所示,曲杆AB 的轴线是半径为R 的四分之一圆弧,杆的横截面是直径为d 的实心圆,d R ,杆的A 端固定,B 端自由,并在B 端作用有垂直于杆轴线
x
y z
q l
h
b
m
m
m m
所在平面的集中力F P 。已知材料的拉压弹性模量为E ,剪切弹性模量为G ,许用拉应力为[]σ。(1)按第三强度理论,许用荷载[]P F = ;
(2)在荷载P F 的作用下,自由端绕杆轴线的转角B θ= 。 解. (1)荷载F P 在固定端A 处产生的弯矩和扭矩均达最大值,且:
max ,max ,
P x P M F R M F R == 在A 截面最高点D 有最大拉应力和最大剪应力,其值分别为:
,max max max max max
331
,/32
/162x P P z P
M M F R
F R W d W d στσππ===
=
=
故此危险点处于二向应力状态,其单元体的应力状态图如图9a 所示,所以
(1max max 2311,022
σσσσσ?==?=??
[],313max 3
3
[]P cr P P R
d
F F σσσσπ∴=-==
≤?
≤
=
=
(2) 求B θ:用能量法求算较为方便,为此,在B 截面加一逆时针转向的单位力
1X =1X =/2
/20
0()()()()1T T
B P
M M M M Rd Rd EI GI ππ????θ??∴
?=+?
?
即
()2
22/2
/20
02
2/2
/2
/2
2222440cos 1cos sin 1cos 21cos 2cos 221632sin 1424P P B P
P P P
P P P P P F R F R d d EI GI F R F R d d EI
GI F R F R F R F R EI GI Ed G d πππππ???
θ??
?????π?π?π-=--+?
?=-- ???
??
??=?--=-- ? ?????
?
??
?
B θ计算结果为正,表明B θ与所加单位力偶1X =的转向相同,即为逆时针转向。
例10-9 图10-14a 所示桁架,各杆的EA 相等。求:(1)节点C 的竖向位移;(2)AC 杆与BC 杆的相对转角。
解. (1) 节点C 竖向位移
为了用公式(10-15)计算位移,用节点法或截面法分别解出载荷和成对单位广义力作用下的各杆轴力,并分别标在图10-14a 、b 的杆边。将其代入式(10-15),可得
()1==)+21+1+20222N NP Cy P P P P F F l F a F a a EA EA F a
EA ??
??
??????????
↓∑
(2)AC 杆与BC 杆的相对转角
为求相对转角,单位广义力状态如图10-14c 所示,是一对加在AC 与CB 杆上的单位力偶。单位力偶作用下的各杆轴力标在图10-14c 的杆边,将其代入式(10-14),可得
121==)+(-)-+2N NP C P P P P
F F l F a F a EA EA a a F EA
?????
?????? ???
??∑
。
§10.3 图 乘 法
由上节可知,计算梁和刚架在载荷作用下的位移时,先要列出()M x 和()M x 方程,然后代入式(10-12)、(10-13)、(10-14)进行积分运算才能求得结果。这样的计算往往是比较麻烦的。但是当梁和刚架符合○1杆轴为直线;○2代表()M x 和()M x 的两个弯矩图中至少有一个是直线图形这些条件时,则上述积分可用图形互乘的代数运算来代替,从而使运算简化。
公式推导
假设在定积分
()()B
A
I M x M x dx =?
的被积函数中M (x )为曲线,()M x 为直线,如图10-15所示。若以图中O 点为原点,则()M x 可表示为
()=tan M x x α?
式中tan α是斜直线()M x 的斜率。由此,积分I 成为
tan ()B
A
I M x xdx α=?
若记M (x )·dx =dA ,它是M (x )图曲线下画阴影线的微面积。则()B A
M x xdx ? 表示曲线M (x )下的图形面积对y 轴的静矩,以x C 表示曲线M (x )下的图形面积形心的位置坐标,A M 为曲线M (x )下的图形面积,则上述定积分变成
()()tan B
M C M C A
I M x M x dx A x A y α===?
式中:tan C C y x α= 为曲线M (x )下的图形面积形心对应的直线y = ()M x 在x =x C 处的纵坐标。上式即为图乘法的依据。
图乘法计算位移的前提条件是杆件为等截面直杆,也即EI 是常数。 因为 ()()1
1
()()M C l l
M x M x dx M x M x dx A y EI EI
EI
=
=
??
? 故以弯曲变形为主的结构位移计算公式(10-14)可改写为
1
i n
M Ci i i i
A y E I =??=∑
(10-16)
由此可见,式(10-12)和(10-13)中的积分可用载荷弯矩图M P (x )图的面积A M 与M P (x )图的形心C 所对应的()M x 图中的()M C =y C 的乘积来代替。这种方法称为图乘法。
图乘法求位移时需注意的问题
(1)i M A (载荷弯矩图的面积)与y C 在杆轴线同侧时i M A ·y C 为正,反之为负。
(2)如果整根杆件不符合图乘法条件,但经过分段后可以使其符合图乘条件,则仍可应用图乘法分段计算。
(3)拱、曲杆结构和连续变截面的结构只能用公式积分,不能进行图乘。
(4)如果某段弯矩图面积及形心位置不易确定时,可将其分解为几个简单图形分别图乘再叠加计算。
在利用图乘法进行运算时,需要计算弯矩图的面积和形心。对于常见的简单图形,笔者已经求得了载荷弯矩图M(x)图与单位弯矩图()
M x图的图乘结果,并将这些结果汇总于表10-1中,以备读者做题时查用。
几种常见图形的图乘结果
表10-1
0()()
l
M x M x dx
?的值
位移计算举例
例10-10 简支梁受均布荷载q的作用如图10-16a所示。梁的抗弯刚度为EI,长度为l。q、EI、l均为已知。求:梁在B端截面的转角和跨中挠度。
解. (1) B截面的转角
为求B截面的转角,单位广义力状态为在B截面加一单位集中力偶,如图10-16b 所示。分别作出梁在荷载和单位力偶作用下的弯矩图如图10-16a、b所示。
由于单位广义力的弯矩图为直线,梁又是等截面的,因此可用图乘法代替积分。查表10-1第6行第1列可知A M ·y C =3/31h lh 。其中:h 1=1,h 3=ql 2/8。代入图乘公式,得
3
124B C ql A y EI EI
θ== ,(逆时针转向)
(2)跨中挠度
为求跨中挠度,建立图10-16c 所示单位广义力状态与单位弯矩图。查表10-1第6行第3列可知
A ·y C =31213h h l
ab
l +
其中:h 1=l /4,h 3=ql 2/8,a =b =l /2。代入图乘公式,得
241
Δ55()1248384Cy C A y EI
l l ql ql EI EI
=
=??=↓ ?
例10-11 试用图乘法求图10-17a 所示梁自由端的挠度y B 。已知梁是等截面的,其抗弯刚度为EI 。
解: 为了求y B ,在梁的自由端加单位载荷
1X =。其余步骤如下。
分别作载荷及单位载荷所产生的弯矩图,如
图10-17b 、c 所示。查表10-1第8行第1列和第2行第1列可知
A M 1·y C 1+ A M 2·y C 2=131443
lh h lh h
+。其中:h 1=-l ,h 3=-ql 2/2,h 4=-F P l 。代入图乘公式,得
()()23411()()42383B C P P l ql l y A y l l F l EI EI F l ql EI EI
????==?-?-+?-?-??
?????=+↓
例10-12 试用图乘法求图10-18a 所示外伸梁自由端C 的挠度y C 。已知梁是等截面的,其抗弯刚度为EI 。
解: 为了求C y ,在梁的自由端C 加单位载荷1X =。分别作载荷及单位载荷所产生的弯矩图,如图10-18b 、c 所示。查表10-1第6行第1列和第8行第1列及第2行第1列,分段图乘可知A M ·y C =
131414
343
lh h ah h lh h ++。 其中:h 1=-/2l ,h 3=ql 2/8,h 4=- ql 2/8。代入图乘公式,得
()222221
132842283281114812848128C l l ql l l ql l l ql y EI
ql ql EI EI
??
??????????=
?-?+??-?-+?-?-??
? ? ? ? ???????????????=-+
+=↓ ??? 例10-13 试用图乘法求图10-19a 所示悬臂梁中点C 的挠度y C 。已知梁是等截面的,其抗弯刚度为EI 。
解: 为了求C y ,在梁的中点C 加单位载荷1X =。分别作载荷及单位载荷所产生的弯矩图,如图10-19b 、c 所示。查表10-1第2行第2列可知
A M ·y C =()123/2
26l h h h +。
其中:h 1=-F P /2l ,h 2=-F P l ,h 3=- l /2。代入图乘公式,得
()()3
512622248P P C P F l F l l l y F l EI EI
????=??-+--=
↓ ? ?????
例10-14 试用图乘法求图10-20a 所示简支梁端截面A 的转角A θ。已知梁是等截面的,其抗弯刚度为EI 。
解: 为了求端截面A 的转角A θ,在梁端截
面A 处加单位力偶1X =。分别作载荷及单位载荷所产生的弯矩图,如图10-20b 、c 所示。查表10-1第2行第2列和第3行第2列可知
A ·y C =()()12312
32266
a a
h h h h h h '''+++。其中:h 1=F P /2a ,h 2=34
P F a 3,h 3=1/2;
12
331/2,1,4
P F a
h h h '''===代入图乘公式,得
()23311221624224512P P P A P F a F a F a a EI
F a EI θ??
????=
+??+?+? ? ?????????=顺时针转向
例10-15 试用图乘法求图10-21a 所示变截面简支梁跨中C 的挠度C y 。梁的抗弯
刚度如图所示。
人、机、料、法、环,全面解析
人、机、料、法、环,全面解析 人机料法环是对全面质量管理理论中的五个影响产品质量的主要因素的简称。一篇关于人、机、料、法、环的解析文章,请收好! 这五大要素论中,人是处于中心位置和驾驶地位的,就像行驶的汽车一样,汽车的四只轮子是“机”、“料”、“法”、“环”四个要素,驾驶员这个“人”的要素才是主要的。没有了驾驶员这辆车也就只能原地不动成为废物了。 一个工厂如果机器、物料、加工产品的方法也好,并且周围环境也适合生产,但这个工厂没有员工的话,那他还是没法进行生产。 人的分析: 1.技能问题? 2.制度是否影响人的工作? 3.是选人的问题吗?
4.是培训不够吗? 5.是技能不对口吗? 6.是人员对公司心猿意马吗? 7.有责任人吗? 8.人会操作机器?人适应环境吗?人明白方法吗?人认识料吗? 机的分析: 就是指生产中所使用的设备、工具等辅助生产用具。生产中,设备的是否正常运作,工具的好坏都是影响生产进度,产品质量的又一要素。 1.选型对吗? 2.保养问题吗? 3.给机器的配套对应吗? 4.作机器的人对吗?机器的操作方法对吗?机器放的环境适应吗? 机器设备的管理分三个方面,即使用、点检、保养。使用即根据机器设备的性能及操作要求来培养操作者,使其能够正确操作使用设备进行生产,这是设备管理最基础的内容。 点检指使用前后根据一定标准对设备进行状态及性能的确认,及早发现设备异常,防止设备非预期的使用,这是设备管理的关键。 保养指根据设备特性,按照一定时间间隔对设备进行检修、清洁、上油等,防止设备劣化,延长设备的使用寿命,是设备管理的重要部分。 料的分析: 1.是真货吗? 2.型号对吗? 3.有保质期吗? 4.入厂检验了吗? 5.用的符合规范吗?
人、机、料、法、环-全面解析
人、机、料、法、环,全面解析,请收好 创芯人科技 1月17日 人机料法环是对全面质量管理理论中的五个影响产品质量的主要因素的简称。一篇关于人、机、料、法、环的解析文章,请收好! 人:指制造产品的人员; 机:指制造产品所用的设备; 料:指制造产品所使用的原材料; 法:指制造产品所使用的方法; 环:指产品制造过程中所处的环境。 这五大要素论中,人是处于中心位置和驾驶地位的,就像行驶的汽车一样,汽车的四只轮子是“机”、“料”、“法”、“环”四个要素,驾驶员这个“人”的要素才是主要的。没有了驾驶员这辆车也就只能原地不动成为废物了。 一个工厂如果机器、物料、加工产品的方法也好,并且周围环境也适合生产,但这个工厂没有员工的话,那他还是没法进行生产。 人的分析: 技能问题? 制度是否影响人的工作? 是选人的问题吗? 是培训不够吗? 是技能不对口吗? 是人员对公司心猿意马吗? 有责任人吗? 人会操作机器?人适应环境吗?人明白方法吗?人认识料吗? 机的分析: 就是指生产中所使用的设备、工具等辅助生产用具。生产中,设备的是否正常运作,工具的好坏都是影响生产进度,产品质量的又一要素。 选型对吗? 保养问题吗? 给机器的配套对应吗? 作机器的人对吗?机器的操作方法对吗?机器放的环境适应吗? 机器设备的管理分三个方面,即使用、点检、保养。使用即根据机器设备的性能及操作要求
来培养操作者,使其能够正确操作使用设备进行生产,这是设备管理最基础的内容。 点检指使用前后根据一定标准对设备进行状态及性能的确认,及早发现设备异常,防止设备非预期的使用,这是设备管理的关键。 保养指根据设备特性,按照一定时间间隔对设备进行检修、清洁、上油等,防止设备劣化,延长设备的使用寿命,是设备管理的重要部分。 料的分析: 是真货吗? 型号对吗? 有保质期吗? 入厂检验了吗? 用的符合规范吗? 料适应环境吗,料与机器配合的了吗,料和其它料会不互相影响? 法的分析: 是按法做的吗? 看的明白吗? 写的明白吗? 法适合吗? 有法吗? 方法是给对应的人吗?方法在这个环境下行吗? 环的分析: 在时间轴上环境变了吗? 光线、温度、湿度、海拔、污染度考虑了吗? 环境是安全的吗? 环境是人为的吗?小环境与大坏境能并容吗? 工作场所环境。指各种产品、原材料的摆放,工具、设备的布置和个人5S。 对危险品控制。一是化学物品的堆放,诸如酒精、天那水之类。二是生产过程中产品对六种化学物质的控制(铅、汞、镉、六价络、多溴联苯、多溴二苯醚) 生产环境。指具体生产过程中针对生产条件对温度、湿度、无尘度等要求的控制。 问题的层次: 对人机料法环的初步定性 初步定性后的二次原因的查找 二次原因的查找仍然可以用人机料法环的分析 二次原因的查找定性后仍需要三次定性即对二次定性结果的原因查找,依然可以适宜和人机料法环的分析方法 其实也就是多题几个为什么 举例: 发现地上的机油
能量法
第十章能量法 承载的构件或结构发生变形时,加力点的位置都要发生变化,从而使载荷位能 减少。如果不考虑加载过程中其他形式的能量损耗,根据机械能守恒定律,减少了 的载荷位能将全部转变为应变能储存于构件或结构内。据此,通过计算构件或结构 的应变能,可以确定构件或结构加力点处沿加力方向的位移。 但是,机械能守恒定律难以确定构件或结构上任意点沿任意方向的位移,也不 能确定构件或结构上各点的位移函数。应用更广泛的能量方法,不仅可以确定构件 或结构上加力点处沿加力方向的位移,而且可以确定构件或结构上任意点沿任意方 向的位移;不仅可以确定特定点的位移,而且可以确定梁的位移函数。 本章介绍的是:用应变能的概念,根据能量守恒原理来解决与弹性结构或构件 变形有关问题的一般方法,这种方法称为能量法。能量法既可用于计算构件或结构 位移;也可用以解决静不定问题及其它一些问题;本章只讨论用能量方法计算位移。 §10.1 杆件的应变能计算 前面我们曾讨论过拉伸(压缩)、扭转或弯曲时的变形计算。但是在工程上还常遇到比较复杂的结构,例如图10-1中所示的桁架、刚架——是指由直杆组成的具有刚性结点的结构、拱——是指杆轴为曲线而且在铅垂载荷作用下会产生水平支座反力的结构等。在计算这些结构上某一点或某一截面的位移时,能量法是比较简单的方法。 通过拉伸(压缩)、扭转、弯曲时的应变能分析,可见:杆件在受力变形后,都储藏有应变能。若不计杆件变形过程中少量的热能等损失,则杆件能量守恒,外力在弹性 体变形过程中所作的功W应等于杆件内储藏的应变能V ε,即V ε =W。 在第七章我们曾经分别得到等截面杆各横截面上的内力为常量时,拉伸(压缩)、扭转、弯曲(参看图10-2)时的应变能表达式如下 拉伸(压缩)时 2 1 22 N P F l V F l EA ε =?=此处F N=F P(10-1)
工程力学-能量法
12 能量法 1、外力的功、应变能、比能等的有关概念, 外力的功 应变能 比能 2、基本变形杆件应变能计算和组合变形杆件应变能计算对于线弹范围内的等直拉压杆的应变能 梁横力弯曲的剪切应变能为(常忽略) 当扭矩Mt沿杆轴变化时,圆轴的扭转应变能 横力弯曲时,不计剪切能,,弯矩沿截面变化,梁的应变能为 3、功能原理、功的互等定理和位移互等定理 4、余能概念 5、卡氏第一和第二定理 解题范例
12.1具有中间铰的线弹性材料梁,受力如图12.1(a)所示,两端梁的弯曲刚度均为EI。用莫尔法确定中间铰两侧界面的相对转角有下列四种分段方法,使判断哪一种是正确的。 (A)按图(b)所示施加一对单位力偶,积分时不必分段; (B)按图(b)所示施加一对单位力偶,积分时必须分段; (C)按图(c)所示施加一对单位力偶,积分时不必分段; (D)按图(c)所示施加一对单位力偶,积分时必须分段; 图12.1 答案:(A) 12.2图12.2示简支梁中点只承受集中力F时,最大转角为,应变能为;中点只承受集中力偶M时,最大挠度是、梁的应变能为。当同时在中点施加F和M时,梁的应变能有以下四种答案,试判断哪一种是正确的。 (A)+; (B)++M; (C)++F; (D)++( M+F); 图12.2 [解] 因为对于线性弹性结构,先加F时梁内的应变能为: =F f F 在加M时,由于反对称载荷,梁中点的挠度仍是f F,所以梁内应变能将增加: M= 当同时施加F和M时的应变能,等于先加F再加M时的应变能,即 + 故答案(A)正确。 12.3 用卡氏第二定理求图12.3所示刚架A截面的位移和B截面的转角。略去剪力Q和轴力N的影响,EⅠ为已知.
(完整版)SMT生产5M管理人.机.料.法.环——最全面解析
SMT生产5M管理人.机.料.法.环——最全面解析 人.机.料.法.环——最全面解析 ? 人:指制造产品的人员; ? ? 机:指制造产品所用的设备; ? ? 料:指制造产品所使用的原材料; ? ? 法:指制造产品所使用的方法; ? ? 环:指产品制造过程中所处的环境。 这五大要素论中,人是处于中心位置和驾驶地位的,就像行驶的汽车一样,汽车的四只轮子是“机”、“料”、“法”、“环”四个要素,驾驶员这个“人”的要素才是主要的。没有了驾驶员这辆车也就只能原地不动成为废物了。
一个工厂如果机器、物料、加工产品的方法也好,并且周围环境也适合生产,但这个工厂没有员工的话,那他还是没法进行生产。 人的分析 1.技能问题? 2.制度是否影响人的工作? 3.是选人的问题吗? 4.是培训不够吗? 5.是技能不对口吗? 6.是人员对公司心猿意马吗? 7.有责任人吗? 8.人会操作机器?人适应环境吗?人明白方法吗?人认识料吗? 机的分析: 就是指生产中所使用的设备、工具等辅助生产用具。生产中,设备的是否正常运作,工具的好坏都是影响生产进度,产品质量的又一要素。 1.选型对吗? 2.保养问题吗? 3.给机器的配套对应吗? 4.作机器的人对吗?机器的操作方法对吗?机器放的环境适应吗? 机器设备的管理分三个方面,即使用、点检、保养。使用即根据机器设备的性能及操作要求来培养操作者,使其能够正确操作使用设备进行生产,这是设备管理最基础的内容。 点检指使用前后根据一定标准对设备进行状态及性能的确认,及早发现设备异常,防止设备非预期的使用,这是设备管理的关键。
保养指根据设备特性,按照一定时间间隔对设备进行检修、清洁、上油等,防止设备劣化,延长设备的使用寿命,是设备管理的重要部分。 料的分析: 1.是真货吗? 2.型号对吗? 3.有保质期吗? 4.入厂检验了吗? 5.用的符合规范吗? 6.料适应环境吗,料与机器配合的了吗,料和其它料会不互相影响? 法的分析: 1.是按法做的吗? 2.看的明白吗? 3.写的明白吗? 4.法适合吗? 5.有法吗? 6.方法是给对应的人吗?方法在这个环境下行吗? 环的分析: 1.在时间轴上环境变了吗? 2.光线、温度、湿度、海拔、污染度考虑了吗? 3.环境是安全的吗? 4.环境是人为的吗?小环境与大坏境能并容吗? 工作场所环境。指各种产品、原材料的摆放,工具、设备的布置和个人5S。 对危险品控制。一是化学物品的堆放,诸如酒精、天那水之类。二是生产过程中产品对六种化学物质的控制(铅、汞、镉、六价络、多溴联苯、多溴二苯醚)生产环境。指具体生产过程中针对生产条件对温度、湿度、无尘度等要求的控制。 问题的层次: 1.对人机料法环的初步定性 2.初步定性后的二次原因的查找 3.二次原因的查找仍然可以用人机料法环的分析 4.二次原因的查找定性后仍需要三次定性即对二次定性结果的原因查找,依然可以适宜和人机料法环的分析方法 5.其实也就是多题几个为什么
愚巧法(Pokayoke)全面解析
愚巧法(Pokayoke)全面解析 防呆法(Pokayoke、Fool-proof)防呆措施 又称防错法、防呆措施、愚巧法。意即在过程失误发生之前即加以防止。是一种在作业过程中采用自动作用、报警、标识、分类等手段,使作业人员不特別注意也不会失误的方法。 其含义:为了实现生产合格率100%的目标,必须在模具、工装夹具方面多用脑筋,添置防止不合格品发生的设备,这就是防呆装置。 狭义:如何设计一个东西,使错误绝不会发生。广义:如何设计一个东西,而使错误发生的机会减至最低的程度。 因此,更具体的说“防呆法”是: 1.具有即使有人为疏忽也不会发生错误的构造──不需要注意力。 2.具有外行人来做也不会错的构造──不需要经验与直觉 3.具有不管是谁或在何时工作都不会出差错的构造──不需要专门知识与高 度的技能。 防呆装置有6类: 1.出现操作失误物品就装不上工装夹具。 2.物品不符合规格,机器就不会加工。 3.出现操作失误,机器就不会加工。 4.自动修正操作失误、动作失误,然后开始加工。
5.在后工序检查出前工序不合格,前工序停止操作。 6.作业上如有遗漏,后工序停止动作。 “防呆法”4原则:1.使作业的动作轻松 难于观察、难拿、难动等作业即变得难做,变得易疲劳而发生失误。区分颜色使得容易看,或放大标示,或加上把手使得容易拿,或使用搬运器具使动作轻松。 2.是作业不要技能与直觉 需要高度技能与直觉的作业,容易发生失误.考虑治具及工具,进行机械化,使新进人员或支持人员也能做不出错的作业。 3.是作业不会有危险 因不安全或不安定而会给人或产品带来危险时,加以改善使之不会有危险.又,马虎行之或勉强行之而发生危险时,设法装设无法马虎或无法勉强的装置。4.是作业不依赖感官 依赖像眼睛、耳朵、感触等感官进行作业时,容易发生误。制作治具或使之机械化,减少用人的感官来判断的作业。又,一定要依赖感官的作业,譬如,当信号一红即同时有声音出现,设法使之能做二重三重的判断。 “防呆法”进行步骤:【步骤1】发现人为疏忽:发生何种之人为疏忽,搜集数据进行调查,重估自己的工作找出疏忽所在。平常即搜集像异材混入、表示失误、数量不足、零件遣忘记
4人机料法环的全面解析
人、机、料、法、环,全面解析 人机料法环是对全面质量管理理论中的五个影响产品质量的主要因素的简称。 人:指制造产品的人员; 机:指制造产品所用的设备; 料:指制造产品所使用的原材料; 法:指制造产品所使用的方法; 环:指产品制造过程中所处的环境。 这五大要素论中,人是处于中心位置和驾驶地位的,就像行驶的汽车一样,汽车的四只轮子是“机”、“料”、“法”、“环”四个要素,驾驶员这个“人”的要素才是主要的。没有了驾驶员这辆车也就只能原地不动成为废物了。一个工厂如果机器、物料、加工产品的方法也好,并且周围环境也适合生产,但这个工厂没有员工的话,那他还是没法进行生产。 人的分析: 1.技能问题? 2.制度是否影响人的工作? 3.是选人的问题吗? 4.是培训不够吗? 5.是技能不对口吗? 6.是人员对公司心猿意马吗? 7.有责任人吗? 8.人会操作机器?人适应环境吗?人明白方法吗?人认识料吗? 机的分析:
就是指生产中所使用的设备、工具等辅助生产用具。生产中,设备的是否正常运作,工具的好坏都是影响生产进度,产品质量的又一要素。 1.选型对吗? 2.保养问题吗? 3.给机器的配套对应吗? 4.作机器的人对吗?机器的操作方法对吗?机器放的环境适应吗? 机器设备的管理分三个方面,即使用、点检、保养。使用即根据机器设备的性能及操作要求来培养操作者,使其能够正确操作使用设备进行生产,这是设备管理最基础的内容。 点检指使用前后根据一定标准对设备进行状态及性能的确认,及早发现设备异常,防止设备非预期的使用,这是设备管理的关键。 保养指根据设备特性,按照一定时间间隔对设备进行检修、清洁、上油等,防止设备劣化,延长设备的使用寿命,是设备管理的重要部分。 料的分析: 1.是真货吗? 2.型号对吗? 3.有保质期吗? 4.入厂检验了吗? 5.用的符合规范吗? 6.料适应环境吗,料与机器配合的了吗,料和其它料会不互相影响? 法的分析: 1.是按法做的吗? 2.看的明白吗? 3.写的明白吗? 4.法适合吗? 5.有法吗? 6.方法是给对应的人吗?方法在这个环境下行吗? 环的分析: 1.在时间轴上环境变了吗? 2.光线、温度、湿度、海拔、污染度考虑了吗? 3.环境是安全的吗? 4.环境是人为的吗?小环境与大坏境能并容吗?
统计能量法相关资料
1、什么是统计能量分析(SEA)及其发展历程? 在以前,结构声的传输主要讨论和研究在一个方向或几个方向的无限结构元之间的传输。对一个有限系统到另一个有限系统之间的结构声传输,由于各个系统的几何形状的影响,使问题变得较复杂,从而给研究带来了比较大的困难。这种系统振动的空间模态是由系统的特征函数和依赖于它的共振频率的系统频率响应特征决定的。一般来说,由两个有限系统形成的耦合系统所具有的模态和共振频率是与组成该系统的两个子系统的共振频率是不一样的。两个子系统之间的功率流(振动子结构之间的振动功率流或振动结构与声传播介质之间的传输功率流)取决于两个子系统的共振频率之间的匹配程度及它们之间的模态的相似程度和在两个子系统中阻尼的分布。另外传统的机械振动分析主要是研究低频模态,因为在许多实际情况下,系统的低频模态是主要的,而且这些模态具有最大的位移响应,对结构振动具有主要的影响;另一方面由于低频时,在所研究的频带范围内,模态数比较少,这样使得利用经典的机械振动分析方法,如传递矩阵法、有限元分析法、边界元分析法成为可能。从实验来说,这些模态也可通过实验方法加以测量。但是对于大型的结构,特别是大型薄结构,如航空器结构、船舶结构或大型机械结构,振动模态分布在很宽的频带范围内,另外载荷激励也是宽带的,如宽带噪声场对飞机蒙皮、火箭运载体的激励,在工业机械噪声控制中,虽然我们常常忽略宽带噪声对结构激励所引起的噪声,但是工业机械结构振动辐射的噪声一般在300Hz~5kHz的宽带范围内,在高模态密度的情况下,经典分析方法给结构振动研究带来更多的困难,甚至不可能.因此采用统计模型的方法来研究问题是很自然的和适当的。 统计能量分析是60年代初开始发展起来的研究动态系统响应的一种统计分析方法,目前已得到广泛应用而成为随机振动分析的重要手段。在机械振动中,人们已习惯于把统计分析方法应用于时间上是随机变化的确定系统的振动。而统计能量分析的重要特征是把振动系统用许多统计集合来描述,也就是统计能量分析中所用的各种参数都是统计参数,而不是指时间特征是随机的或不是随机的。 统计能量分析这个名词强调了这个新的研究方法的特点,用统计能量分析的主要创始人之一的,SEA已经看作是研究复杂结构振动的一种观点,它本身是应用了一系列的理论和实验的“方法”,而大多数方法在SEA出现以前就已经广泛使用,统计一词强调可用已知动态参数分布的统计集合数来描述所要研究的系统;能量一词表示感兴趣的变量是能量,而其它动态变量,如位移、声压等,可以从能量中得到;分析一词用来强调SEA是一种研究问题的方法而不是一种特殊的技术。 SEA方法是20世纪60年代初发展起来的,是解决复杂系统宽带高频动力学问题的重要工具。当时美国BBN公司的一个课题组在波士顿试图借用室内声学和热传导的一些经验来解决航空航天器发射过程中系统受到随机宽带激励后声和振动响应问题。之后,这个课题组的主要成员R.Lyon和,激发了一系列的基础理论研究和实验验证。Energy Analysis of
全面解析数据挖掘的分类及各种分析方法
全面解析数据挖掘的分类及各种分析方法 1.数据挖掘能做以下六种不同事情(分析方法): ?分类(Classification) ?估值(Estimation) ?预言(Prediction) ?相关性分组或关联规则(Affinitygroupingorassociationrules) ?聚集(Clustering) ?描述和可视化(DescriptionandVisualization) ?复杂数据类型挖掘(Text,Web,图形图像,视频,音频等) 2.数据挖掘分类 以上六种数据挖掘的分析方法可以分为两类:直接数据挖掘;间接数据挖掘?直接数据挖掘 目标是利用可用的数据建立一个模型,这个模型对剩余的数据,对一个特定的变量(可以理解成数据库中表的属性,即列)进行描述。 ?间接数据挖掘 目标中没有选出某一具体的变量,用模型进行描述;而是在所有的变量中建立起某种关系。 ?分类、估值、预言属于直接数据挖掘;后三种属于间接数据挖掘 3.各种分析方法的简介 ?分类(Classification) 首先从数据中选出已经分好类的训练集,在该训练集上运用数据挖掘分类的技术,建立分类模型,对于没有分类的数据进行分类。 例子: a.信用卡申请者,分类为低、中、高风险 b.分配客户到预先定义的客户分片 注意:类的个数是确定的,预先定义好的 ?估值(Estimation) 估值与分类类似,不同之处在于,分类描述的是离散型变量的输出,而估值处理连续值的输出;分类的类别是确定数目的,估值的量是不确定的。 例子: a.根据购买模式,估计一个家庭的孩子个数 b.根据购买模式,估计一个家庭的收入 c.估计realestate的价值
能量法(1)测试卷
能量法(1)测试卷 测试卷一(45分钟): 测11.1.1 图示悬臂梁,当单独作用力F 时,截面B 的转角为θ,若先加C M ,后加F ,则在加F 的过程中,力偶C M ____ A. 不做功; B. 做正功; C. 做负功,其值为C M θ; D. 做负功,其值为 1 2 C M θ; 测11.1.2 一圆轴在图示两种受扭情况下,其______。 A. 应变能相同,自由端扭转角不同; B. 应变能不同,自由端扭转角相同; C. 应变能和自由端扭转角均相同; D. 应变能和自由端扭转角均木同。 测11.1.3 图示梁支承在弹簧常量分别为和的B 、C 两弹簧上,试求A 截面的铅垂位移。EI 为已知。 1k 2k
测11.1.4 绗架如图示,各杆材料、截面面积均相同,若E =200 GPa ,A 200,F=40kN,a =l m ,求D 点的铅垂位移。 2mm 测试卷二(45分钟): 测11.2.1 一杆同时承受集中力F 和力偶M ,设单独作用F 时,杆的变形 能为;单独作用M 时,杆的变形能为。在F 和M 共同作用下, ()V F ε()V M ε对于图_______所示的载荷作用方式,杆的应变能(,)()()V F M V F V M εεε≠+。
测11.2.2 图示结构中,水平梁ACB 的弯曲刚度为EI ,斜杆CD 的长度为L 、拉压刚度为EA ,若单位力按图示方式施加,如果不计梁AC 段轴力引起的变 形.则按单位载荷法.B 点的垂直位移为Δ= ()() N N F F M x M x dx EA EI +∫,式中第一项表示______。 A .C 点的总位移; B . C 点沿C D 方向的位移; C .C 点的铅垂位移; D .CD 杆缩短引起B 点的铅垂位移。 测1t .2.3 图示小曲率曲杆,弯曲刚度为置J ,在A4。作用下的弯矩方程为 测11.2.3 图示小曲率曲杆,弯曲刚度为置EI ,在e M 作用下的弯矩方程为M(θ), 设Δ= 1(x M Rd EI θθ)∫ ,则Δ是_______。 A .截面A 的转角A B θ; B. 截面B 的转角ΔB; C .截面B 、A 的相对转角; D. 截面B 形心的水平位移。 测11.2.4 图示等直杆,受一对大小相等、方向相反的力F 作用。若已知杆的拉压刚度为EA 和材料的泊松比为μ,则由功的互等定理可知,该杆的轴向变形ΔL =_____。(提示;在杆的轴向施加另一组拉力F 。) 测11.2.5 刚架如图示,EI 为常数,求K 点的水平位移和铅垂位移。
全面解析人机料法环
全面解析人、机、料、法、环! 人机料法环是对全面质量管理理论中的五个影响产品质量的主要因素的简称。一篇关于人、机、料、法、环的解析文章,请收好! ?人:指制造产品的人员; ?机:指制造产品所用的设备; ?料:指制造产品所使用的原材料; ?法:指制造产品所使用的方法; ?环:指产品制造过程中所处的环境。 这五大要素论中,人是处于中心位置和驾驶地位的,就像行驶的汽车一样,汽车的四只轮子是“机”、“料”、“法”、“环”四个要素,驾驶员这个“人”的要素才是主要的。没有了驾驶员这辆车也就只能原地不动成为废物了。 一个工厂如果机器、物料、加工产品的方法也好,并且周围环境也适合生产,但这个工厂没有员工的话,那他还是没法进行生产。 人的分析: 1. 技能问题? 2. 制度是否影响人的工作? 3. 是选人的问题吗? 4. 是培训不够吗? 5. 是技能不对口吗? 6. 是人员对公司心猿意马吗? 7. 有责任人吗? 8. 人会操作机器?人适应环境吗?人明白方法吗?人认识料吗? 机的分析: 就是指生产中所使用的设备、工具等辅助生产用具。生产中,设备的是否正常运作,工具的好坏都是影响生产进度,产品质量的又一要素。 1. 选型对吗? 2. 保养问题吗? 3. 给机器的配套对应吗?
4. 作机器的人对吗?机器的操作方法对吗?机器放的环境适应吗? 机器设备的管理分三个方面,即使用、点检、保养。使用即根据机器设备的性能及操作要求来培养操作者,使其能够正确操作使用设备进行生产,这是设备管理最基础的内容。 点检指使用前后根据一定标准对设备进行状态及性能的确认,及早发现设备异常,防止设备非预期的使用,这是设备管理的关键。 保养指根据设备特性,按照一定时间间隔对设备进行检修、清洁、上油等,防止设备劣化,延长设备的使用寿命,是设备管理的重要部分。 料的分析: 1. 是真货吗? 2. 型号对吗? 3. 有保质期吗? 4. 入厂检验了吗? 5. 用的符合规范吗? 6. 料适应环境吗,料与机器配合的了吗,料和其它料会不互相影响? 法的分析: 1. 是按法做的吗? 2. 看的明白吗? 3. 写的明白吗? 4. 法适合吗? 5. 有法吗? 6. 方法是给对应的人吗?方法在这个环境下行吗? 环的分析: 1. 在时间轴上环境变了吗? 2. 光线、温度、湿度、海拔、污染度考虑了吗? 3. 环境是安全的吗? 4. 环境是人为的吗?小环境与大坏境能并容吗? ?工作场所环境。指各种产品、原材料的摆放,工具、设备的布置和个人5S。 ?对危险品控制。一是化学物品的堆放,诸如酒精、天那水之类。二是生产过程中产品对六种化学物质的控制(铅、汞、镉、六价络、多溴联苯、多溴二苯醚) ?生产环境。指具体生产过程中针对生产条件对温度、湿度、无尘度等要求的控制。 问题的层次: 1. 对人机料法环的初步定性 2. 初步定性后的二次原因的查找 3. 二次原因的查找仍然可以用人机料法环的分析 4. 二次原因的查找定性后仍需要三次定性即对二次定性结果的原因查找,依然可以适宜和人机料法环的分析 方法 5. 其实也就是多题几个为什么
人机料法环的全面解析
人机料法环的全面解析文档编制序号:[KK8UY-LL9IO69-TTO6M3-MTOL89-FTT688]
人、机、料、法、环,全面解析 人机料法环是对全面质量管理理论中的五个影响产品质量的主要因素的简称。 人:指制造产品的人员; 机:指制造产品所用的设备; 料:指制造产品所使用的原材料; 法:指制造产品所使用的方法; 环:指产品制造过程中所处的环境。 这五大要素论中,人是处于中心位置和驾驶地位的,就像行驶的汽车一样,汽车的四只轮子是“机”、“料”、“法”、“环”四个要素,驾驶员这个“人”的要素才是主要的。没有了驾驶员这辆车也就只能原地不动成为废物了。一个工厂如果机器、物料、加工产品的方法也好,并且周围环境也适合生产,但这个工厂没有员工的话,那他还是没法进行生产。 人的分析: 1.技能问题? 2.制度是否影响人的工作? 3.是选人的问题吗? 4.是培训不够吗? 5.是技能不对口吗? 6.是人员对公司心猿意马吗? 7.有责任人吗? 8.人会操作机器人适应环境吗人明白方法吗人认识料吗 机的分析: 就是指生产中所使用的设备、工具等辅助生产用具。生产中,设备的是否正常运作,工具的好坏都是影响生产进度,产品质量的又一要素。 1.选型对吗? 2.保养问题吗? 3.给机器的配套对应吗?
4.作机器的人对吗机器的操作方法对吗机器放的环境适应吗 机器设备的管理分三个方面,即使用、点检、保养。使用即根据机器设备的性能及操作要求来培养操作者,使其能够正确操作使用设备进行生产,这是设备管理最基础的内容。 点检指使用前后根据一定标准对设备进行状态及性能的确认,及早发现设备异常,防止设备非预期的使用,这是设备管理的关键。 保养指根据设备特性,按照一定时间间隔对设备进行检修、清洁、上油等,防止设备劣化,延长设备的使用寿命,是设备管理的重要部分。 料的分析: 1.是真货吗? 2.型号对吗? 3.有保质期吗? 4.入厂检验了吗? 5.用的符合规范吗? 6.料适应环境吗,料与机器配合的了吗,料和其它料会不互相影响? 法的分析: 1.是按法做的吗? 2.看的明白吗? 3.写的明白吗? 4.法适合吗? 5.有法吗? 6.方法是给对应的人吗方法在这个环境下行吗 环的分析: 1.在时间轴上环境变了吗? 2.光线、温度、湿度、海拔、污染度考虑了吗? 3.环境是安全的吗? 4.环境是人为的吗小环境与大坏境能并容吗
新电商法全面解析
新电子商务法将在2019年1月1日正式实施,新电商法上线对于我们来说最重要的是要了解相关法律并重视各条法律法规,下面来详细全面解析新电商法。 1、电商法究竟说了什么? 电商法基本上就是一些基础的法律条文。整个电商法里很多内容是现成的,也就是其他法律条文里面都有的。电商法只是把与电商相关的内容集中一下,并没有太大的突破。它的出现就是为了规范市场,只是为了规范合理运营,遵循市场运作规则,更好地服务相关市场和相关消费者群体。 2、电子商务做什么? 电子商务就是通过互联网等信息网络销售商品、提供服务、经营活动。法律提出了一个特别的点,有些东西不在电子商务的范畴内,比如文化产品服务、电视节目、新闻出版,包括金融产品这一类,这些没有规范在电子商务内。 我们可以有刷D的内容,大家不用避讳,刷D是电商中避不开的话题。 3、新电商法目的
制定电子商务法是为了推进商业技术和模式的研发,包括知识或者技术的创新,这些东西都是需要一定的市场沉淀的。还有就是消费升级,这么多年来阿里一直在做,比如质量、服务上的提升。 原来电子商务不被正视,现在从法律层面确定其形式,线上线下应该共同管理,有利于未来国内电商市场甚至是互联网市场的发展。 4、卖家要办理登记 本次电商法中有一个规定,就是办理登记,只要你是电子商务经营者,就要去办相关的市场登记,比如营业执照或个体工商户。到时候也会有对平台的一些规范,我们将会看到什么样的情况下需要登记,基本上跟现在是差不多的。 5、个税交纳 税收怎么征收。如果你本来就是公司,包括天猫、企业店,那么这样的店铺就按原来规定的去交就好了。 交纳比例: 小额纳税人:分为定税(每个月固定交纳税金)和财务公司纳税(按3%或3.5%的税率); 一般纳税人:按开票额交纳。
咨询方法与技巧-全面解析要点
咨询中(面对面的方法及技巧 第一首先准备六大问题 1、你是谁 2、你要跟我谈什么? 3、你谈的事情对我有什么好处? 4、如何证明你讲的是事实? 5、为什么我要跟你签约? 6、为什么我要现在跟你签约? 1、我是谁? 1 老师 1)学科准备小升初中高考试题分析 2)及时了解教育信息3)分析学习问题 2 心理专家 1)教育心理学 2)销售心理学 3销售 1)营销学 2)成功学 2、你要跟我谈什么? 1孩子的学习问题: 1.)孩子自身问题 a 智力因素b 非智力因素(1学习目标学习动机学习兴趣 2. )学校问题 a 老师因素 b 环境因素 2家庭教育问题 A 亲子关系 b 孩子心理成长 c 3、改变孩子学习状态 提高孩子的成绩 增加孩子的综合素质 4、 1 2 3 4 5 奖杯证书 6 5、 1 2 3 6、为什么我要现在跟你签? 1 时间的紧迫性 2 老师的紧张 3 学生很多 4 优惠活动 5 某某王牌老师正好有空挡 第二咨询前的准备工作 从电话中初步了解孩子的情况
1、家住哪里:如果近, 可以推陪读; 如果远, 那么就可以类推比他更远的孩子是在这怎么学习的, 距离不是问题, 主要是解决孩子的主动性问题. 家庭住址还可以反映这个家庭的经济情况. 2、哪所学校的: 从学校可以看出孩子所在学习环境的整体范围, 同时给我们提供了调查他所在学校的一些学生和老师的情况, 对现场咨询帮助非常大. 同时可以准备相对应道具 3、谁管孩子的学习:一般不管孩子学习的人是家里的主要经济来源, 俗话说叫能做主的, 那么对于邀约时尽量把做主的约来, 如果做主的没有来, 那么对价格和一些细节可以保留, 一定要等做主的来. 4、辅导历史:如果辅导过, 那么对于这样的家长一种是不满意, 一种是满意. 单; 满意, 说明家长信任辅导, 那么就要突出我们的辅导优势, 增加家长的辅导欲望. 5、孩子的爱好:这主要是为了孩子直接来的时候可以和他有共同的话题, . 6、根据孩子的初步情况准备道具常用道具和特用道具 , 特用道具是和学生有直接关系的, 如同班同学同学校同学, 抓住任何一个细节. 第三咨询中的准备 1注意道具的摆设和使用时机,特别强调道具ppts 测评的使用 要求: 1、所培训的必须背诵下来 2、学会灵活运用不要生搬硬套 3、熟练掌握各年级测评报告 4 、学会铺垫(说我们的成功案例) 如某学生120个小时,成绩提高了**全日制在我们这里学习了15天,提高了90某学生在我响辅导效果。
全面解析人、机、料、法、环
人机料法环是对全面质量管理理论中的五个影响产品质量的主要因素的简称。 这五大要素论中,人是处于中心位置和驾驶地位的,就像行驶的汽车一样,汽车的四只轮子是“机”、“料”、“法”、“环”四个要素,驾驶员这个“人”的要素才是主要的。没有了驾驶员这辆车也就只能原地不动成为废物了。 一个工厂如果机器、物料、加工产品的方法也好,并且周围环境也适合生产,但这个工厂没有员工的话,那他还是没法进行生产。 一、4M1E 人机料法环又简称“4M1E法”: “4M”——人员(Man)机器(Machine)物料(Material)方法(Method) “1E”——环境(Environment) 人:指制造产品的人员; 机:指制造产品所用的设备; 料:指制造产品所使用的原材料; 法:指制造产品所使用的方法; 环:指产品制造过程中所处的环境。
人的分析: 1. 技能问题? 2. 制度是否影响人的工作? 3. 是选人的问题吗? 4. 是培训不够吗? 5. 是技能不对口吗? 6. 是人员对公司心猿意马吗? 7. 有责任人吗? 8. 人会操作机器?人适应环境吗?人明白方法吗?人认识料吗? 机的分析: 就是指生产中所使用的设备、工具等辅助生产用具。生产中,设备的是否正常运作,工具的好坏都是影响生产进度,产品质量的又一要素。 1. 选型对吗? 2. 保养问题吗? 3. 给机器的配套对应吗? 4. 作机器的人对吗?机器的操作方法对吗?机器放的环境适应吗? 机器设备的管理分三个方面,即使用、点检、保养。使用即根据机器设备的性能及操作要求来培养操作者,使其能够正确操作使用设备进行生产,这是设备管理最基础的内容。 点检指使用前后根据一定标准对设备进行状态及性能的确认,及早发现设备异常,防止设备非预期的使用,这是设备管理的关键。 保养指根据设备特性,按照一定时间间隔对设备进行检修、清洁、上油等,防止设备劣化,延长设备的使用寿命,是设备管理的重要部分。 料的分析: 1. 是真货吗? 2. 型号对吗? 3. 有保质期吗?
第七章 能量积分法
第七章 能量积分法 在前面几章内,讨论了定解问题的几种解法,或者说就是考虑怎样把定解问题的解找出来。至于解的本质,基本上未加讨论。第一章已讲过,定解问题的适定性包含三个方面的内容,除了解的存在性以外,还要考察解是不是只有一个(惟一性)、解是不是连续地依赖于定解条件(稳定性)。在这一章内,我们利用能量积分的方法来证明波动方程定解问题的解既是惟一的也是稳定的。 §7.1 一维波动方程初值问题的能量不等式 在这一节内,我们将就弦振动问题导出振动弦的动能和位能的表达式,然后再证明总能量(动能与位能的和)所满足的不等式。 由物理学知,若质点的质量是m ,在时刻t 其速度是v ,则它在时刻t 的动能为21 2 mv 。现在考虑弦上的元素ds ,当弦作微小横向振动时 ds dx ≈,它在时刻t 的速度为t u ,所以ds 在时刻t 所具有的动能近似地 为21 2 t u dx ρ,其中ρ是弦的密度(一般来说是x 的函数),整个弦在t 时刻的动能为 2 012 l t U u dx ρ=? (7.1) 再看弦在t 时刻的位能(或称势能),所谓位能就是使弦变形时所做的功。假设弦的不受外力作用,则使弦变形的力只有张力,反抗张力所做的功就是弦的位能的增量。由第一章§1.1中第一个例子可知,当弦的振幅很小时,它的张力可以看作是一个常向量,其大小记作T ,
张力在位移方向的分量是近似于x Tu 。在这个力的作用下,弦变形了,其位移的增量是x u du u dx ?≈=。所以弦上元素ds 在t 时刻的位能近似为 2 12 x Tu dx ,整个弦在t 时刻的位能为 2 12l x V Tu dx =? (7.2) 当然,如果除了张力T 以外,在t 时刻在弦位移方向还受到密度为 (,)f x t 的外力作用,这时位能应为 2 01()2 l x V Tu fu dx =+? (7.3) 将(7.1)和(7.2)(或(7.3))相加,即得弦在t 时刻的总能量 22 01()()2l t x E t u Tu dx ρ= +? (7.4) 或 22011 ()()22 l t x E t u Tu fu dx ρ=++? (7.5) 如果ρ是常数,并不计常数因子,(7.4)可以表示为 222 0()((,)(,))l t x E t u x t a u x t dx =+? (7.6) 其中2T a ρ = 。或者更简单地写成 22 0()((,)(,))l t x E t u x t u x t dx =+? (7.7) 我们把(7.6)或(7.7)称为能量积分,或称为u 的能量模(有时将其正平方根称为u 的能量模)。 现在来考察初值问题 22 22200(,),,0,(),, (),,t t t u u a f x t x t t x u x x u x x ?ψ==???=+-∞<<+∞>????? =-∞<<+∞?? =-∞<<+∞??? (7.8) 设u 是(7.8)的解(古典解),为了建立能量不等式,我们过点00(,)x t 作特征线00()x x a t t =±-,它们与x 轴相交于00(,0)x at -及00(,0)x at +,这
结构动力学能量法
结构动力学能量法 势能:设位移函数。局限性,不能同时考虑多种函数,频率偏高,动位移精度好,动内力 精度低。 考虑梁的轴向、弯曲、剪切和扭转变形的应变能: (1)或者: (2)动能: (3) (4) (5) 根据能量守恒,即最大动能等于最大势能,可以求出结构的频率。 若只考虑弯曲变形,梁的频率为: (6) 如果还有集中质量则,
(7) 式中的y 为位移函数,只要满足位移边界条件即可。 以上两式也叫瑞雷商。 从式(7)还可以推导出: (8) (9)应用:如图,
其周期: 例题:两边简支的梁,取 取
余能:保持势能的优点,只设一个位移函数,可以推广到板壳及有限元中,计算频率精度特高,接近实际频率,动位移差,动内力精度高。 1、弯曲梁动力计算的最小余能公式 ∑ ?? - + + = ∏R u dx EA x N GA x Q EJ x M l ) 2 ) ( 2 ) ( 2 ) ( ( 2 2 2 μ (1)式中:最后一项为支座沉陷的余能。 结构运动方程: ) ( ) ( ]) ( [ 1 2= '' + -'' ''x y N x y m x y EJω(2)该方程比静力问题多了) ( 2x y mω -这一项,可以把它比拟成弹性地基上的梁。
0)()(])([1=''++''''x y N x ky x y EJ (3) 该简支梁弯曲变形余能为: 12 1212/0 2)22(212k x dx x x x P EJ l +-=∏? (4) 如果梁是放在弹性系数为k 的地基上时,其弹簧的余能为: dx k x ky l ?0 2 2)]([ dx m x y m EJ x M l )2)]([2)((2 2 20 2ωω-=∏? (5) 其中M (x )为假想惯性力引起的弯矩函数。 考虑剪切变形影响时式(5)可以改写成: dx m x y m GA x Q EJ x M l )2)]([2)(2)((2 2 220 2ωωμ-+=∏? (6) 设 l x a x y πsin )(= (7) 则假想惯性力为:)()(2 x y mw x q = (8) ?? ???=??-=??)() ()()(x Q x x M x q x x Q (9) 可以得到: ? ? ??? +=+=l x a N l x l a m x M l x l a N l x l a m x Q πππωππ ππ ωsin sin }()(cos cos )(122 12 (10) 将式(10)代入(6)得到 GAl a N l a EJ N l a m GA N l a m EJ N m l a m l a m l GA l a m l EJ l μπωμπωωωωπμωπ24222] 2[2)(212)(222122 12 2123221224224222424++++-+=∏ (11) 式(11)对a m 2 ω取导数:
第十章 能量法
一、是非题 10.1 杆系结构的变形能,等于各杆变形能之和。() 10.2 弹性体变形能与加力次序无关,只与最后受力有关。() 10.3 结构上的外力作功可能为正或负,因而结构的变形能有正负之分。() 10.4 线性弹性结构的变形能可以叠加而非弹性结构的变形能不能叠加。() 10.5 载荷与变形能之间必为非线形关系。() 10.6以莫尔积分求各种结构在载荷作用下的位移时都可以采用图形互乘法。() 10.7应用单位力法计算出结构在某处的位移值时在数值上就等于该单位力所做的虚功。() 10.8若由载荷引起之弯矩图面积的代数和为零(=0 ),则不论其形心所对应的单位力弯矩图之值Mc 为何值,图乘所得必为零。() 10.9超静定结构的多余约束数即等于建立力法方程的变形条件数。() 10.10结构中的内力与应力只与结构受力和结构尺寸有关,与材料无关。() 10.11变形协调法在本质上也是力法。() 10.12力法的基本未知量均不能用静力平衡条件求得。() 10.13温度变化和支座位移不会引起静定结构的内力,但一般会引起超静定结构的内力。() 10.14力法基本方程均是根据结构支座处的位移约束条件建立的。() 10.15n 次超静定结构的静定基可由解除结构任意n 个约束而得。() 10.16力法正则方程适用于任何材料制成的小变形超静定结构。() 10.17外力超静定结构必须解除外部多余约束而得到静定基。() 10.18以力法求解超静定结构后经力平衡方程验算无误,说明结果正确。() 二、选择题
10.19设一梁在n 个广义力F 1 ,F 2 ,……,F n 共同作用下的外力功 ,则式中为()。 A. 广义力F i 在其作用处产生的挠度 B. 广义力F i 在其作用处产生的相应广义位移 C. n 个广义力在F i 作用处产生的挠度 D. n 个广义力在F i 作用处产生的广义位移 10.20一根梁处于不同的载荷或约束状态,则() A. 梁的弯矩图相同,其变形能也一定相同 B. 梁的弯矩图不同,其变形能也一定不同 C. 梁的变形能相同,其弯矩图也一定相同 D. 梁的弯矩图相同,而约束状态不同,其变形能也不同 10.21一梁在集中力F 作用下,其应变能为V e 。若将力F 改为 2 F ,其他条件不变,则其应变能为()。 A. 2 V e B. 4 V e C. 8 V e D. 16 V e 10.22当结构上作用多个载荷时,其变形能()。 A. 可以叠加 B. 不可以叠加 C. 再某些情况下可以叠加 D. 产生不同种应力的才可以叠加 10.23变形体虚功原理的应用条件是()