GY-26电子指南针使用手册

GY-26电子指南针使用手册(IIC+串口)
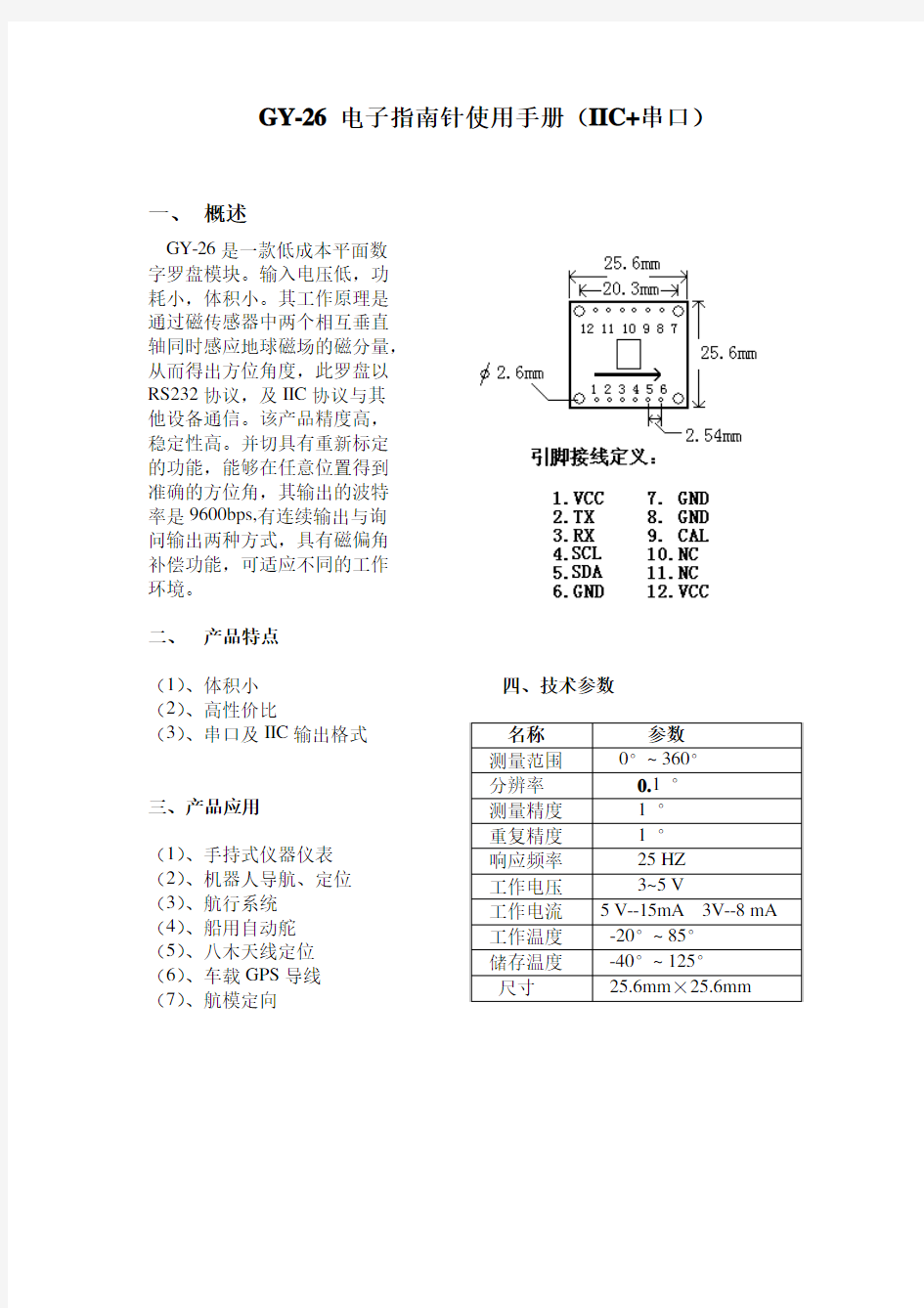
一、概述
GY-26是一款低成本平面数
字罗盘模块。输入电压低,功
耗小,体积小。其工作原理是
通过磁传感器中两个相互垂直
轴同时感应地球磁场的磁分量,
从而得出方位角度,此罗盘以
RS232协议,及IIC 协议与其
他设备通信。该产品精度高,
稳定性高。并切具有重新标定
的功能,能够在任意位置得到
准确的方位角,其输出的波特
率是9600bps,有连续输出与询
问输出两种方式,具有磁偏角
补偿功能,可适应不同的工作
环境。
二、产品特点
(1)、体积小
四、技术参数(2)、高性价比
(3)、串口及IIC 输出格式
三、产品应用
(1)、手持式仪器仪表
(2)、机器人导航、定位
(3)、航行系统
(4)、船用自动舵
(5)、八木天线定位
(6)、车载GPS 导线
(7)、航模定向
名称参数测量范围0°~360°分辨率0.1°测量精度1°重复精度1°响应频率25HZ 工作电压3~5V 工作电流5V--15mA 3V--8mA 工作温度-20°~85°储存温度-40°~125°尺寸25.6mm ×25.6mm
五、串口通信协议
(1)、串口通信参数
波特率:9600bps校验位:N数据位:8停止位:1
(2)、模块输出格式,每帧包含8个字节:
①.Byte0:0x0D(ASCII码回车)
②.Byte1:0x0A(ASCII码换行)
③.Byte2:0x30~0x33角度百位(ASCII0~3)
④.Byte3:0x30~0x39角度十位(ASCII0~9)
⑤.Byte4:0x30~0x39角度个位(ASCII0~9)
⑥.Byte5:0x2E(ASCII码小数点)
⑦.Byte6:0x30~0x39角度小数位(ASCII0~9)
⑧.Byte7:0x00~0xFF校验和(仅低8bit)
注:校验和Byte7=(Byte0+Byte1+…….Byte6)结果仅取低8bit
例:一帧数据<0x0D-0x0A-0x33-0x35-0x39-0x2E-0x36-0x1C>=359.6°
(3)、命令字节,由外部控制器发送至模块(十六进制)
①.0x31:进行一次角度测量--------返回值参考输出格式
②.0xC0:校准磁场开始---------返回值参考输出格式(000.0度)
③.0xC1:校准磁场结束--------------返回值参考硬铁补偿‘②’
④.0xA0-0XAA-0XA5-0XC5:
恢复出厂设定----------------------返回值参考输出格式(000.0度)
⑤.0xA0-0XAA-0XA5-IIC_ADDR:
模块的IIC地址修改-------------返回值参考输出格式(000.0度)
IIC地址范围参考“IIC通信协议(3)”
⑥.0x03+磁偏高8位:
磁偏角设定,正北方向设定--返回值参考输出格式(000.0度)
⑦.0x04+磁偏低8位:
磁偏角设定,正北方向设定--返回值参考输出格式(000.0度)
例:发送0XC0至模块时,模块应答以下1帧
<0x0D-0x0A-0x30-0x30-0x30-0x2E-0x30-0x05>表示成功
Led灯亮起,进入校准
例:发送0x03,0x00,0x04,0x64至模块时,模块应答以下1帧(4次)<0x0D-0x0A-0x30-0x30-0x30-0x2E-0x30-0x05>表示成功
磁偏角被修改为10.0度
六、IIC通信协议
(1)、进行IIC通信时,模块相当于24C04,EEPROM存储器,通信非常简单。
模块内部对应地址的数据(相当EEPROM各地址的数据),映射各参数
请参考下表
模块内部地址地址的数据含义
0x00未用到
0x01角度值高8位
0x02角度值低8位
0x03磁偏角高8位
0x04磁偏角低8位
0x05未用到
0x06未用到
0x07校准等级值
实际当前角度值为上表“角度值高8位”与“角度值低8位”合成的16
位数据,数据范围0-3599(因为分辨率为0.1°)
实际当前磁偏角值为“磁偏角高8位”与“磁偏角低8位”合成的16
位数据,数据范围0-3599(因为分辨率为0.1°)
(2)、模块的命令表,经IIC总线写入模块中
命令值作用
0x00+0x31角度测量
0x00+0xC0校准
0x00+0xC1停止校准
0x00+(0xA0+0XAA+0XA5+0XC5)恢复出厂设置
0x00+(0xA0+0XAA+0XA5+IIC_ADDR)IIC地址修改
0x03+磁偏高8位值磁偏角修改
0x04+磁偏低8位值磁偏角修改
磁偏角的值,范围0-3599(因为分辨率为0.1°),是由2个8位的数据组成,当修改模块磁偏角时,分为高8位值,低8位值,写入模块。
(3)、模块的IIC地址可修改,出厂默认是0xe0。模块上电时led对应IIC地址闪动,闪动的次数由模块上电led亮起,led灭掉开始记。若模块上电立即向模块发送命令,则led不闪动。向模块写入地址时,模块只接收以下16个数据地址,其他无效
模块地址Led闪动次数
0xe00
0xe21
0xe42
0xe63
0xe84
0xea5
0xec6
0xee7
0xf08
0xf29
0xf410
0xf611
0xf812
0xfa13
0xfc14
0xfe15
七、术语说明
(1)、磁偏角
磁北线与真北线之间的夹角(如图),地球表面任一点的磁子午圈同地理子午圈的夹角。不同的地点磁偏角不同,同一地点不同的时间磁偏角也不同。模块的磁偏角=原始角度+设定磁偏角度,即顺时针加上。例如:磁偏角为0的100度,此时更改磁偏角为10度,那么模块输出为100+10=110度。
(2)、硬铁补偿,磁场校准
当电子指南针使用的环境发生改变时,由于受到周围磁场的影响,输出的角度也将会受到干扰,为了消除干扰,需要进行环境磁场校准。本模块的校准方法有三种种如下:
①在模块的第9(CAL)引脚,接一按键至电源负极(GND),当第一
.
次按下按键时,进入校准状态,LED常亮起。保持模块水平,缓慢
旋转1周(旋转1周时间大约1分钟)。再次按下按键LED灭,校
准结束。
.
②控制器串口发送数据0XC0至模块后LED常亮起,模块应答成功数
据。保持模块水平,缓慢旋转1周(旋转1周时间大约1分钟)。发
送数据0XC1至模块,LED灭,校准结束。此时模块模块应答本次
校准的等级(0级~9级,级数越大说明校准越好),应答一帧格式为:
Byte0:0x0D(ASCII码回车)
Byte1:0x0A(ASCII码换行)
Byte2:0x30(ASCII码0)
Byte3:0x30(ASCII码0)
Byte4:0x30(ASCII码0)
Byte5:0x2E(ASCII码小数点)
Byte6:0x30~0x39校准等级(ASCII0~9)
Byte7:0x00~0xFF校验和(仅低8bit)
注:校验和Byte7=(Byte0+Byte1+…….Byte6)结果仅取低8bit
例:发送0XC1至模块时,模块应答以下1帧
<0x0D-0x0A-0x30-0x30-0x30-0x2E-0x39-0x0E>表示成功校准等级9
③.控制器经IIC总线发送数据0x00+0xC0至模块后LED常亮起保持模块
水平,缓慢旋转1周(旋转1周时间大约1分钟)。发送数据0x00+0XC1
至模块,LED灭,校准结束。
八、结束
(1)、模块参数都是基于一个标准5V状态下测试的。建议使用纹波较小的电源供给。
(2)、模块测量时LED的闪动对应测量的频率。校准时LED常亮。
(3)、模块测量时和校准时,保持水平,将获得最好的准确度,测量时应远离磁体尽量30厘米以上。
(4)、模块内部有记忆功能,可掉电记忆校准系数及磁偏角。
(5)、恢复出厂设定,即恢复出厂时的校准系数及磁偏角度,并不会修改模块当前的IIC地址。
(6)、模块输入输出的高低电平3-5V,可以直接与单片机串口,单片机IO连接,可以直接与PL2303,CH340,FT232等芯片连接,但不能与电脑串口直接连接。
电子罗盘的工作原理及校准 电子罗盘,电子指南针,android
Android ST集成传感器方案实现电子罗盘功能 电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。随着半导体工艺的 进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机 上都实现了电子罗盘的功能。而基于电子罗盘的应用(如Android的Skymap)在各个软件 平台上也流行起来。 要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。 1. 地磁场和航向角的背景知识 如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。 图1 地磁场分布图 地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2 地磁场矢量分解示意图 实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。由于罗盘保持水平,只需要用磁力计水平方向两 轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。当罗盘水平旋转的时候,航向角在0?- 360?之间变化。 2.ST集成磁力计和加速计的传感器模块LSM303DLH 2.1 磁力计工作原理 在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。这种具有晶体结构的合金材料对外界的磁场很敏感,磁 场的强弱变化会导致AMR自身电阻值发生变化。 在制造过程中,将一个强磁场加在AMR上使其在某一方向上磁化,建立起一个主磁域,与主磁域垂直的轴被称为该AMR的敏感轴,如图3所示。为了使测量结果以线性的方式变化,AMR材料上的金属导线呈45º角倾斜排列,电流从这些导线上流过,如图4所示。由初始的强磁场在AMR材料上建立起来的主磁域和电流的方向有45º的夹角。 图3 AMR材料示意图 图4 45º角排列的导线
毕业论文致谢
毕业论文致谢 毕业论文致谢模板 毕业论文致谢模板(一): 感谢我的导师 教授,他们严谨细致、一丝不苟的作风一向是我工作、学习中的榜样;他们循循善诱的教导和不拘一格的思路给予我无尽的启迪。 感谢我的#老师,这片论文的每个实验细节和每个数据,都离不 开你的细心指导。而你开开朗的个性和宽容的态度,帮忙我能够很 快的融入我们这个新的实验室。 感谢我的室友们,从遥远的家来到这个陌生的城市里,是你们和我共同维系着彼此之间兄弟般的感情,维系着寝室那份家的融洽。 四年了,仿佛就在昨日。四年里,我们没有红过脸,没有吵过嘴, 没有发生上大学前所担心的任何不开心的事情。只是今后大家就难 得再聚在一齐吃每年元旦那顿饭了吧,没关系,各奔前程,大家珍重。但愿远赴M国的C平平安安,留守复旦的快快乐乐,挥师北上 的G顺顺利利,也愿离开我们寝室的开开心心。我们在一齐的日子,我会记一辈子的。 感谢我的爸爸妈妈,焉得谖草,言树之背,养育之恩,无以回报,你们永远健康快乐是我最大的心愿。 在论文即将完成之际,我的情绪无法平静,从开始进入课题到论文的顺利完成,有多少可敬的师长、同学、朋友给了我无言的帮忙,在那里请理解我诚挚的谢意。 毕业论文致谢模板(二): 毕业论文致谢
从开始写作至论文最终定稿,总共花费了我一个月以来所有的业余时间,虽说在繁忙的工作之余要完成这样一篇论文的确不是一件很简单的事情,但我内心深处却满含深深的感激之情。感谢**单位为我们带给的这次学习机会,感谢**班所有的任课老师,感谢班主任老师**,是你们让我能够静静地坐下来,在知识的海洋里吸取更多的营养,从而能够为自己进一步的加油充电。透过论文的撰写,使我能够等系统、全面的学习有关财务管理新型的、先进的前沿理论知识,并得以借鉴众多专家学者的宝贵经验,这对于我今后的工作和我为之服务的企业,无疑是不可多得的宝贵财富。由于本理论水平比较有限,论文中的有些观点以及对企业实力的归纳和阐述难免有疏漏和不足的地方,欢迎老师和专家们指正。 毕业论文致谢模板(三): 四年的大学生活就快走入尾声,我们的校园生活就要划上句号,心中是无尽的难舍与眷恋。从那里走出,对我的人生来说,将是踏上一个新的征程,要把所学的知识应用到实际工作中去。 回首四年,取得了些许成绩,生活中有快乐也有艰辛。感谢老师四年来对我孜孜不倦的教诲,对我成长的关心和爱护。 学友情深,情同兄妹。三年的风风雨雨,我们一同走过,充满着关爱,给我留下了值得珍藏的最完美的记忆。 在我的十几年求学历程里,离不开父母的鼓励和支持,是他们辛勤的劳作,无私的付出,为我创造良好的学习条件,我才能顺利完成完成学业,感激他们一向以来对我的抚养与培育。 最后,我要个性感谢 老师、 老师。是他们在我毕业的最后关头给了我们巨大的帮忙与鼓励,使我能够顺利完成毕业设计,在此表示衷心的感激。 #老师认真负责的工作态度,严谨的治学精神和深厚的理论水平都使我收益匪浅。他无论在理论上还是在实践中,都给与我很大的
基于单片机的电子指南针的设计
龙源期刊网 https://www.360docs.net/doc/268660898.html, 基于单片机的电子指南针的设计 作者:刘季秋彭森 来源:《卷宗》2017年第11期 摘要:指南针是我国的四大发明之一,早期的指南针采用了磁化指针和方位盘的组合方式,这样的指南针携带起来很不方便,且指示灵敏度上有一定不足,准确性很差。本文通过对电子指南针基本工作原理的研究分析,采用磁阻(GMR)传感器采集某一方向磁场强度,然后通过MCU控制器对其进行处理并显示上传,达到了显示当前所指方向的目的。实际测试指南针模块精度达到1°,能够在LCD上显示当前方位,并能通过键盘控制上传数据到上位机。这样的指南针精度更高,更智能,在大大提高了精度的同时,也降低了成本和设计难度。 1 引言 指南针是用以判别方位的一种简单仪器,又称指北针。指南针的前身是中国古代四大发明之一的司南。主要组成部分是一根装在轴上可以自由转动的磁针。磁针在地磁场作用下能保持在磁子午线的切线方向上。磁针的北极指向地理的北极,利用这一性能可以辨别方向。 电子指南针系统是一个典型的单片机系统,了解其工作原理及其信号处理流程有利于研究更加复杂的嵌入式系统,特别是系统中采用进口的磁传感器及其相关信号的采集芯片更是有利于研究磁场传感器的实现机理,以便将其更加广泛的应用。 2 工作原理 本系统采用磁阻(GMR)传感器采集磁场强度,然后把磁场强度转换成数字量,单片机 再对这些数字量进行处理,最后将处理得到的结果进行显示。 电子指南针的系统主要由前端磁阻传感器、磁场测量专用转换芯片、单片控制器、辅助扩展电路、键盘、显示模块以及系统电源几个部分组成。 整个系统中前端的磁阻传感器负责测量地磁场的大小并将磁场的变化转化为微弱的电流的变化,专用的磁场测量芯片负责把磁阻传感器变化的电流(模拟量)转换成微控制器可以识别的数字量,然后将该数字信号即采集到的数据通过SPI总线上传给微控制器。微控制器将表征当前磁场大小的数字量按照方位进行归一化等处理后通过直观的LCD进行方位显示,同时可以通过键盘控制微控制器进行相应的操作,如将转换后的数据通过串口的形式发送到上位机。整个系统中还包含了实时时钟等一些辅助电路,使整个系统功能得到进一步的扩展,这使得电子指南针更具备实用价值。 3 电源电路
电子罗盘
电子指南针 指南针 1、概述 指南针是用以判别方位的一种简单仪器。指南针的前身是中国古代四大发明之一的司南。主要组成部分是一根装在轴上可以自由转动的磁针。磁针在地磁场作用下能保持在磁子午线的切线方向上。磁针的北极指向地理的南极,利用这一性能可以辨别方向。常用于航海、大地测量、旅行及军事等方面。 指南针的发明是我国劳动人民,在长期的实践中对物体磁性认识的结果。由于生产劳动,人们接触了磁铁矿,开始了对磁性质的了解。人们首先发现了磁石引铁的性质。后来又发现了磁石的指向性。经过多方的实验和研究,终于发明了可以实用的指南针。 2、磁偏角与磁倾角 现在人们已经知道,地球的两个磁极和地理的南北极只是接近,并不重合。磁针指向的是地球磁极而不是地理的南北极,这样磁针指的就不是正南、正北方向而略有偏差,这个角度就叫磁偏角。又因为地球近似球形,所以磁针指向磁极时必向下倾斜,和水平方向有一个夹角,这个夹角称为磁倾角。不同地点的磁偏角和磁倾角都不相同。磁偏角和磁倾角的发现使指南针的指向更加准确。
图1. 地球磁场示意图 3、罗盘定位 要确定方向除了指南针之外,还需要有方位盘相配合。最初使用指南针时,可能没有固定的方位盘,随着测方位的需要,出现了磁针和方位盘一体的罗盘 4、电子指南针 指南针是一个重要的导航工具,甚至在G P S中也会用到。电子指南针将替代旧的针式指南针或罗盘指南针,因为电子指南针全采用固态的元件,还可以简单地和其他电子系统接口。 电子指南针系统中磁场传感器的磁阻(M R)技术是最佳的解决方法,和现在很多电子指南针还在使用的磁通量闸门传感器相比较,M R技术不需要绕线圈而且可以用I C生产过程(I C-l i k e p r o c e s s)生产,是一个更值得使用的解决方案。 由于M R有高灵敏度,它甚至比这个应用范围中的霍尔元件更好。
GY-26电子指南针使用手册
GY-26电子指南针使用手册(IIC+串口) 一、概述 GY-26是一款低成本平面数 字罗盘模块。输入电压低,功 耗小,体积小。其工作原理是 通过磁传感器中两个相互垂直 轴同时感应地球磁场的磁分量, 从而得出方位角度,此罗盘以 RS232协议,及IIC 协议与其 他设备通信。该产品精度高, 稳定性高。并切具有重新标定 的功能,能够在任意位置得到 准确的方位角,其输出的波特 率是9600bps,有连续输出与询 问输出两种方式,具有磁偏角 补偿功能,可适应不同的工作 环境。 二、产品特点 (1)、体积小 四、技术参数(2)、高性价比 (3)、串口及IIC 输出格式 三、产品应用 (1)、手持式仪器仪表 (2)、机器人导航、定位 (3)、航行系统 (4)、船用自动舵 (5)、八木天线定位 (6)、车载GPS 导线 (7)、航模定向 名称参数测量范围0°~360°分辨率0.1°测量精度1°重复精度1°响应频率25HZ 工作电压3~5V 工作电流5V--15mA 3V--8mA 工作温度-20°~85°储存温度-40°~125°尺寸25.6mm ×25.6mm
五、串口通信协议 (1)、串口通信参数 波特率:9600bps校验位:N数据位:8停止位:1 (2)、模块输出格式,每帧包含8个字节: ①.Byte0:0x0D(ASCII码回车) ②.Byte1:0x0A(ASCII码换行) ③.Byte2:0x30~0x33角度百位(ASCII0~3) ④.Byte3:0x30~0x39角度十位(ASCII0~9) ⑤.Byte4:0x30~0x39角度个位(ASCII0~9) ⑥.Byte5:0x2E(ASCII码小数点) ⑦.Byte6:0x30~0x39角度小数位(ASCII0~9) ⑧.Byte7:0x00~0xFF校验和(仅低8bit) 注:校验和Byte7=(Byte0+Byte1+…….Byte6)结果仅取低8bit 例:一帧数据<0x0D-0x0A-0x33-0x35-0x39-0x2E-0x36-0x1C>=359.6° (3)、命令字节,由外部控制器发送至模块(十六进制) ①.0x31:进行一次角度测量--------返回值参考输出格式 ②.0xC0:校准磁场开始---------返回值参考输出格式(000.0度) ③.0xC1:校准磁场结束--------------返回值参考硬铁补偿‘②’ ④.0xA0-0XAA-0XA5-0XC5: 恢复出厂设定----------------------返回值参考输出格式(000.0度) ⑤.0xA0-0XAA-0XA5-IIC_ADDR: 模块的IIC地址修改-------------返回值参考输出格式(000.0度) IIC地址范围参考“IIC通信协议(3)” ⑥.0x03+磁偏高8位: 磁偏角设定,正北方向设定--返回值参考输出格式(000.0度) ⑦.0x04+磁偏低8位: 磁偏角设定,正北方向设定--返回值参考输出格式(000.0度) 例:发送0XC0至模块时,模块应答以下1帧 <0x0D-0x0A-0x30-0x30-0x30-0x2E-0x30-0x05>表示成功 Led灯亮起,进入校准 例:发送0x03,0x00,0x04,0x64至模块时,模块应答以下1帧(4次)<0x0D-0x0A-0x30-0x30-0x30-0x2E-0x30-0x05>表示成功 磁偏角被修改为10.0度
电子专业毕业研发设计课题汇总
1.基于labVIEW虚拟滤波器的设计与实现 2.双闭环直流调速系统设计 3.单片机脉搏测量仪 4.单片机控制的全自动洗衣机毕业设计论文 5.FPGA电梯控制的设计与实现 6.恒温箱单片机控制 7.基于单片机的数字电压表 8.单片机控制步进电机毕业设计论文 9.函数信号发生器设计论文 10.110KV变电所一次系统设计 11.报警门铃设计论文 12.51单片机交通灯控制 13.单片机温度控制系统 14.CDMA通信系统中的接入信道部分进行仿真与分析 15.仓库温湿度的监测系统 16.基于单片机的电子密码锁 17.单片机控制交通灯系统设计 18.基于DSP的IIR数字低通滤波器的设计与实现 19.智能抢答器设计 20.基于LabVIEW的PC机与单片机串口通信 21.DSP设计的IIR数字高通滤波器 22.单片机数字钟设计
23.自动起闭光控窗帘毕业设计论文 24.三容液位远程测控系统毕业论文 25.基于Matlab的PWM波形仿真与分析 26.集成功率放大电路的设计 27.波形发生器、频率计和数字电压表设计 28.水位遥测自控系统毕业论文 29.宽带视频放大电路的设计毕业设计 30.简易数字存储示波器设计毕业论文 31.球赛计时计分器毕业设计论文 32.IIR数字滤波器的设计毕业论文 33.PC机与单片机串行通信毕业论文 34.基于CPLD的低频信号发生器设计毕业论文 35.110kV变电站电气主接线设计 36.m序列在扩频通信中的应用 37.正弦信号发生器 38.红外报警器设计与实现 39.开关稳压电源设计 40.基于MCS51单片机温度控制毕业设计论文 41.步进电动机竹竿舞健身娱乐器材 42.单片机控制步进电机毕业设计论文 43.单片机汽车倒车测距仪 44.基于单片机的自行车测速系统设计
单片机原理及应用第三版(张毅刚)1-6章全
第1章思考题及习题1参考答案 一、填空 1. 除了单片机这一名称之外,单片机还可称为或。答:微控制器,嵌入式 控制器. 2.单片机与普通微型计算机的不同之处在于其将、、和三部分,通 过内部连接在一起,集成于一块芯片上。答:CPU、存储器、I/O口、总线 3. AT89S52单片机工作频率上限为 MHz。答:33 MHz。 4. 专用单片机已使系统结构最简化、软硬件资源利用最优化,从而大大降低和提 高。答:成本,可靠性。 二、单选 1. 单片机内部数据之所以用二进制形式表示,主要是 A.为了编程方便B.受器件的物理性能限制 C.为了通用性D.为了提高运算速度 答:B 2. 在家用电器中使用单片机应属于微计算机的。 A.辅助设计应用B.测量、控制应用 C.数值计算应用D.数据处理应用 答: B 3. 下面的哪一项应用,不属于单片机的应用范围。 A.工业控制 B.家用电器的控制 C.数据库管理 D.汽车电子设备 答:C 三、判断对错 1. STC系列单片机是8051内核的单片机。对 2. AT89S52与AT89S51相比,片内多出了4KB的Flash程序存储器、128B的RAM、1个中断 源、1个定时器(且具有捕捉功能)。对 3. 单片机是一种CPU。错 4. AT89S52单片机是微处理器。错
5. AT89C52片内的Flash程序存储器可在线写入,而AT89S52则不能。错 6. 为AT89C51单片机设计的应用系统板,可将芯片AT89C51直接用芯片AT89S51替换。对 7. 为AT89S51单片机设计的应用系统板,可将芯片AT89S51直接用芯片AT89S52替换。对 8. 单片机的功能侧重于测量和控制,而复杂的数字信号处理运算及高速的测控功能则是DSP 的长处。对 四、简答 1. 微处理器、微计算机、微处理机、CPU、单片机、嵌入式处理器它们之间有何区别? 答:微处理器、微处理机和CPU它们都是中央处理器的不同称谓,微处理器芯片本身不是计算机。而微计算机、单片机它们都是一个完整的计算机系统,单片机是集成在一个芯片上的用于测控目的的单片微计算机。 2. AT89S51单片机相当于MCS-51系列单片机中的哪一型号的产品?“S”的含义是什么? 答:相当于MCS-51系列中的87C51,只不过是AT89S51芯片内的4K字节Flash存储器取代了87C51片内的4K字节的EPROM。 3. 单片机可分为商用、工业用、汽车用以及军用产品,它们的使用温度范围各为多少? 答:商用:温度范围为0~+70℃;工业用:温度范围为-40~+85℃;汽车用:温度范围为-40~+125℃;军用:温度范围为-55~+150℃。 4. 解释什么是单片机的在系统编程(ISP)与在线应用编程(IAP)。 答:单片机的在系统编程ISP(In System Program),也称在线编程,只需一条与PC机USB口或串口相连的ISP下载线,就可把仿真调试通过的程序代码从PC机在线写入单片机的Flash存储器内,省去了编程器。在线应用编程(IAP)就是可将单片机的闪存内的应用程序在线修改升级。 5. 什么是“嵌入式系统”? 系统中嵌入了单片机作为控制器,是否可称其为“嵌入式系统”? 答:广义上讲,凡是系统中嵌入了“嵌入式处理器”,如单片机、DSP、嵌入式微处理器,都称其为“嵌入式系统”。但多数人把“嵌入”嵌入式微处理器的系统,称为“嵌入式系统”。目前“嵌入式系统”还没有一个严格和权威的定义。目前人们所说的“嵌入式系统”,多指后者。 6. 嵌入式处理器家族中的单片机、DSP、嵌入式微处理器各有何特点?它们的应用领域有何 不同? 答:单片机体积小、价格低且易于掌握和普及,很容易嵌入到各种通用目的的系统中,
电子指南针
电子指南针 概述 指南针是一种重要的导航工具,可应用在多种场合中。电子指南针内部结构固定,没有移动部分,可以简单地和其它电子系统接口,因此可代替旧的磁指南针。并以精度高、稳定性好等特点得到了广泛运用。公司生产的半导体器件KMZ52是一种专门用于电子指南针的二维磁场传感器。它采用磁场传感器的磁阻(MR)技术,并用翻转技术消除信号偏移,而用电磁反馈技术来消除温度的敏感漂移。由于外界存在干扰,该系统集成了几种特殊的抗干扰技术来提高系统精度。本文介绍了电子指南针的工作原理及电路设计,同时给出了其抗干扰设计以及信号和数据的处理方法。 编辑本段工作原理与总体方案 Z1和Z4为翻转线圈,Z2和Z3为补偿线圈。由于环境温度可能会影响系统精度,因此,在高精度系统中,可以通过补偿线圈对其进行补偿。内部有两个正交的磁场传感器? 分别对应二维平面的X轴和Y轴。磁场传感器的原理是利用磁阻(MR)组成磁式结构,这样可改变电磁物质在外部磁场中的电阻系数。以便在磁场传感器的翻转线圈Z1和Z2上加载翻转电信号后使之能够产生变化的磁场。由于该变化磁场会造成磁阻变化(ΔR)0并将其转化成变化的差动电压输出,这样,就能根据磁场大小正比于输出差动电压的原理,分别读取对应的两轴信号,然后再进行处理计算即可得到偏转角度。整个电子指南针系统主要由传感器单元、信号调整单元(SCU)、方向确定单元(DDU)和显示单元四部分组成。电子指南针的总体设计框图如图2所示。图中,磁场传感器KMZ52用于将地磁场信号转化成电信号输出,信号调整单元用于将磁场传感器单元中的输出信号成比例放大,并将其转换成合适的信号hex和hey,同时消除信号的偏移。对于保证系统的精度来说,SCU是最重要的部件。通过DDU可将信号调整单元输出的两路信号hex和hey进行放大,然后再按下式计算出偏转角度α:α=arctan?hey/hex这样根据抗干扰技术算法对α进行处理就可得出该磁场的偏转角度,最后通过显示单元进行输出。 编辑本段硬件设计 内部桥式结构的磁阻输出是差动电压,通过运算放大器可以成比例放大,因此,在测量地磁场信号时,为了将两个磁场传感器信号放大同样的倍数,可以将二者的翻转线圈串联,并对差动电压选用同样的运放结构。翻转信号从①口输入,X、Y轴差动电压信号则分别从②、③口输出。然后通过处理系统对传来的信号进行A/D采样、数值处理和校正后,即可得到所求的角度。 编辑本段数值处理 由于KMZ52的输出信号很微弱,故信号干扰较大。在输出幅值很小的位置上,通常有300mV左右且变化很大的干扰;而在输出幅值时则近似保持恒值。两路信号幅值与角度的关系如图4所示。为使二者的比值接近tanα?0<α<90°的变化,可以在幅值较大且数值变化较小的角度范围内,使幅值保持基本不变;而在幅值较小且数值变化较大的角度范围内,用一个函数改变其幅值变化曲线。具体实现时,可按照一定角度对曲线进行分段,并对各段用一次函数y=ax+b去拟合。这样,就可以使幅值变化曲线接近tanα。角度划分越细,精度越高。磁场传感器KMZ52的精度为3°,若按15°划分,可将精度提高到1°。若按5°对其划分,精度可高达0.3°。如划分更细,精度还可进一步提高。若采用高阶函数去拟合,也可以提高精度。实际上,在精度要求不高的情况下,通常以15°划分就可以达到要求。 编辑本段干扰校正
罗经使用方法
构造包括:构造包括: (一)中央之透明玻璃小圆盒,内含: (1)带钗形头的磁针。 (2)底盘上之红线,以南北轴的基准。 (1)带钗形头的磁针。 (2)底盘上之红线,以南北轴的基准。 (3)红在线一端之两旁画有两点,两点处即指著北方。 (二)小圆盒外镶一木制转盘,上有各种用途不同之刻度,以供测量定位。 (三)最外一层为一方形盘座,用以固定玻璃小圆盒及木制转盘。 上系二透明垂直之交叉线,以测量时之基准。 平面图 第一层显示方位名称。 第二层即是以地球磁力线为基准者,一般称为地盘,用以测量屋内各种器物之方位。第三层即是地盘之纳音层。
第四层即是以地球子午线为基准者,一般称为人盘,用以测量屋外形势。 第五层即是天盘。 罗经因于应用上的不同,有各种层次。一般少则二、三层多则数十层。 第一层显示东、东南、南、西南、西、西北、北八方,其中 东方包括甲、卯、乙三个字。 东南包括辰、巽、巳三个字。 南方包括丙、午、丁三个字。 西南包括未、坤、申三个字。 西方包括庚、酉、辛三个字。 西北包括戍、乾、亥三个字。 北方包括壬、子、癸三个字。 自甲卯乙至壬子癸共二十四个字、每字占15度即成了第二层。 第二层即以地磁子午线为基准来测量房宅内各种器物之方位。一般称此层为地盘。 第三层为配合第二层使用时,所需考虑的纳音问题。于第二层每一个字下均有三格,包括两种至三种纳音或一空格。 例: 南方丙字下则有丁巳(纳音土)、庚午(纳音土)及一空格。 又例: 西北方戍字下则有丙戍(纳音土)、戊戍(纳音木)及庚戍(纳音金)三种不同之纳音。一般除了确定方位外,还需考虑该方位之纳音是否与出生年之纳音相生或相同。设方向为壬向时,壬字下包括癸亥(纳音水)及甲子(纳音金)。 若出生年之纳音为木时,则当对准癸亥方向为佳。 若出生年之纳音为金时,则当对准甲子方向为佳。 若出生年之纳音为水时,则甲字方向或癸亥方向均可。 若出生年之纳音为土时,则甲字方向尚可用。 若可调于空格处。即调于癸亥与甲字之间。
电子指南针开题报告
一、综述本课题国内外研究动态,说明选题的依据和意义 指南针是人类日常生活中不可缺少的一种判别方向的工具。在人类历史的几千年前,指南针就已经被发明并予以应用。如今,在军事,工业,导航,生活等的各个方面,指南针一如既往地发挥其作用。 中国是世界上公认发明指南针(Compass)的国家。据《古矿录》记载最早出现于战国时期的河北磁山(今河北省邯郸市磁山一带)一带。指南针的发明是我国汉族劳动人民在长期的实践中对物体磁性认识的结果。由于生产劳动,人们接触了磁铁矿,开始了对磁性质的了解。人们首先发现了磁石吸引铁的性质,后来又发现了磁石的指向性。经过多方面的实验和研究,终于发明了实用的指南针。 最早的指南针是司南。它是用天然磁石制成的。样子象一把汤勺,圆底,可以放在平滑的“地盘”上并保持平衡,且可以自由旋转。当它静止的时候,勺柄就会指向南方。司南由青铜盘和天然磁体制成的磁勺组成,青铜盘上刻有二十四向,置磁勺于盘中心圆面上,静止时,勺尾指向为南。 虽然指南针的始祖在中国被发明,但是由于社会的进步和发展,人们对方位的判断要求也随之提高。因此,古代的司南及各类机械指南针由于种种因素并未得到广泛的应用,如,天然磁体资源有限并不易找到,在后期加工时又容易因为打击、受热等工序而失磁。也是因为这样,司南的磁性比较弱,而通过接触旋转而指明方向,需要它与地盘接触处要非常光滑,否则会因转动摩擦阻力过大,而难于旋转,影响指南效果。机械指南针的可携带性以及稳定性也是导致其未能普遍使用的因素。 近几十年来,由于国内外电子技术的飞速发展,特别是在磁传感器和专用芯片(ASIC)上的发展使能指南针的基本实现机理有了质的改变,不再是机械结构而采用了磁场传感器和专用处理器对磁场进行测量和处理后指示方向,这就是当前应用较为广泛的电子式指南针。与传统的机械指针式指南针相比,因电子式指南针采用电信号传送,且以较为直观的方式显示测量的结果,所以电子式指南针无论是在灵敏度上还是在精度上都远胜前者,而且不会因为机械磨损而减短使用寿命。且电子指南针采用高度集成的功能性模块,其体积与重量可以达到很小,在可携带性上也大大优于机械指南针。 国外现阶段研究电子指南针的主要应用是提供地磁导航功能,相对于其他导航手段而言,地磁导航起步得比较晚。在20世纪60年代中期,美国的E2systems公司提出了基于地磁异常场等值线匹配的MAGCOM系统, 70年代获得测量数据后,系统进行了离线实验。20世纪80年代初,瑞典的Lund学院对船只的地磁导航进行了实验验证,实验中将地磁强度的测量数据与地磁图进行人工比对,确定船只的位置,同时根据距离已知的两个磁传感器的输出时差,确定船只的速度。
电子类毕业设计方案经典题目集
本工作室承接电子类毕业设计论文一条龙服务!!!电子毕业设计:945701216 1.基于labVIEW虚拟滤波器的设计与实现 2.双闭环直流调速系统设计 3.单片机脉搏测量仪 4.单片机控制的全自动洗衣机毕业设计论文 5.FPGA电梯控制的设计与实现 6.恒温箱单片机控制 7.基于单片机的数字电压表 8.单片机控制步进电机毕业设计论文 9.函数信号发生器设计论文 10.110KV变电所一次系统设计 11.报警门铃设计论文 12.51单片机交通灯控制 13.单片机温度控制系统 14.CDMA通信系统中的接入信道部分进行仿真与分析 15.仓库温湿度的监测系统 16.基于单片机的电子密码锁 17.单片机控制交通灯系统设计 18.基于DSP的IIR数字低通滤波器的设计与实现 19.智能抢答器设计
20.基于LabVIEW的PC机与单片机串口通信 21.DSP设计的IIR数字高通滤波器 22.单片机数字钟设计 23.自动起闭光控窗帘毕业设计论文 24.三容液位远程测控系统毕业论文 25.基于Matlab的PWM波形仿真与分析 26.集成功率放大电路的设计 27.波形发生器、频率计和数字电压表设计 28.水位遥测自控系统毕业论文 29.宽带视频放大电路的设计毕业设计 30.简易数字存储示波器设计毕业论文 31.球赛计时计分器毕业设计论文 32.IIR数字滤波器的设计毕业论文 33.PC机与单片机串行通信毕业论文 34.基于CPLD的低频信号发生器设计毕业论文 35.110kV变电站电气主接线设计 36.m序列在扩频通信中的应用 37.正弦信号发生器 38.红外报警器设计与实现 39.开关稳压电源设计 40.基于MCS51单片机温度控制毕业设计论文 41.步进电动机竹竿舞健身娱乐器材
基于labVIEW虚拟滤波器的设计与实现
基于labVIEW虚拟滤波器的设计与实 现 1
2
基于labVIEW虚拟滤波器的 设计与实现 2.双闭环直流调速系统设计 3.单片机脉搏测量仪 4.单片机控制的全自动洗衣机 毕业设计论文 5.FPGA电梯控制的设计与实 现 6.恒温箱单片机控制 7.基于单片机的数字电压表 8.单片机控制步进电机毕业设 计论文 9.函数信号发生器设计论文 10.110KV变电所一次系统设计 11.报警门铃设计论文 12.51单片机交通灯控制 13.单片机温度控制系统 14.CDMA通信系统中的接入 信道部分进行仿真与分析 15.仓库温湿度的监测系统 16.基于单片机的电子密码锁17.单片机控制交通灯系统设计 18.基于DSP的IIR数字低通 滤波器的设计与实现 19.智能抢答器设计 20.基于LabVIEW的PC机与 单片机串口通信 21.DSP设计的IIR数字高通滤 波器 22.单片机数字钟设计 23.自动起闭光控窗帘毕业设计 论文 24.三容液位远程测控系统毕业 论文 25.基于Matlab的PWM波形 仿真与分析 26.集成功率放大电路的设计 27.波形发生器、频率计和数字 电压表设计 28.水位遥测自控系统毕业论文 29.宽带视频放大电路的设计毕 业设计 3
30.简易数字存储示波器设计毕 业论文 31.球赛计时计分器毕业设计论 文 32.IIR数字滤波器的设计毕业 论文 33.PC机与单片机串行通信毕 业论文 34.基于CPLD的低频信号发生 器设计毕业论文 35.110kV变电站电气主接线设 计 36.m序列在扩频通信中的应用 37.正弦信号发生器 38.红外报警器设计与实现 39.开关稳压电源设计 40.基于MCS51单片机温度控 制毕业设计论文 41.步进电动机竹竿舞健身娱乐 器材 42.单片机控制步进电机毕业设 计论文 43.单片机汽车倒车测距仪 44.基于单片机的自行车测速系 统设计 45.水电站电气一次及发电机保 护 46.基于单片机的数字显示温度 系统毕业设计论文 47.语音电子门锁设计与实现 48.工厂总降压变电所设计-毕 业论文 49.单片机无线抢答器设计 50.基于单片机控制直流电机调 速系统毕业设计论文51.单片机串行通信发射部分毕 业设计论文 52.基于VHDL语言PLD设计的出租车计费系统毕业设计论 文 53.超声波测距仪毕业设计论文 54.单片机控制的数控电流源毕 4
徐东海常见等电子体原理及如何判断等电子体
等电子原理及其应用 等电子原理:含有相同原子数(除氢外)和价电子数的分子或离子往往具有相似的几何构型和化学键合情况。 1、同族元素互换法 即将既定粒子中的某元素换成它的同族元素。如:(1)CCl4的等电子体确定:换IVA族元素有SiCl4、GeCl4等;换VIIA族元素有CF4、CBr4、CI4、CFCl3、……;同时换可有SiF4、SiFCl3、……。 (2)CO2的等电子体确定:可将O原子换为S原子得COS、CS2,注意不能将C原子换为Si原子,因为CO2和SiO2的结构不同(前者为分子晶体,后者为原子晶体)。同理,不能将BeCl2的等电子体确定为MgCl2或BeF2(后两种为离子晶体)。 (3)SO42-的等电子体确定:将一个O原子换为S原子得S2O32-;NO3-的等电子体可确定为PO3-。(4)对于原子晶体类也可作类似推导:金刚石C n与晶体硅Si n互为等电子体。 2、价电子迁移法 即将既定粒子中的某元素原子的价电子逐一转移给组成中的另一种元素的原子,相应原子的质子数也随之减少或增加,变换为具有相应质子数的元素。 一般来说,讨论的元素为s区或p区元素,即主族元素居多,通常相关元素的族序数满足A+B=C+D(或A+B=2C)关系的,可考虑将A、B等个数换为C、D(或1A、1B换为2C)。如:
(1)CO2的等电子体确定,除了上述结果以外,还可以采用价电子迁移法:C、O原子的价电子数分别为4、6,从周期表中的位置看,中间夹着N元素,N原子价电子数为5,一个O原子拿一个电子给C原子,在电性不变条件下质子数同时变为7(价电子同时变为5),则可换为两个N原子(由此也可以看出N2与CO互为等电子体)得N2O;如果将C原子的两个价电子转移给两个O原子,元素原子分别转换为1个Be、2个Cl,就可以得到CO2的另一个等电子体BeCl2。 同样可以判断:金刚石C2n与晶体硅Si2n的等电子体还可以为金刚砂 (SiC)n、GaAs、AlP等;石墨C2n与白石墨(BN)n互为等电子体;无机苯B3N3H6与有机苯C6H6互为等电子体。 (2)离子之间的等电子体也可以推导:与N3-的等电子体查找方法,可将2个N原子换为1个C原子和一个O原子可得CNO-。 3、电子—电荷互换法 即将既定粒子中的某元素原子的价电子转化为粒子所带的电荷。这种方法可实现分子与离子的互判。如: CN-的等电子体查找可用N原子1个电子换作1个负电荷,则N原子换为C原子,离子带2个负电荷,其等电子体即为C22-;反之,将CN-的电荷转化为1个电子,该电子给C原子,即得N2,若给N 原子即得CO。同样可判断HNO3的等电子体为HCO3-;ICl4-与XeCl4互为等电子体
stm32电子指南针
《小型智能电子终端》 课程设计说明书 题目:电子指南针 院(系):信息科学与工程学院 专业班级:电子1102 学生姓名:王金辉 学号:20111185061 指导教师:徐琴 20 14 年 6 月 9 日至20 14 年 6 月 25 日 华中科技大学武昌分校制
小型智能电子终端课程设计任务书
目录 1.前言 (1) 2.总体设计方案 (2) 2.1总体设计 (2) 3.硬件设计 (3) 3.1 STM32 (3) 3.2显示模块 (4) 4.软件设计 (6) 4.1 12864模块 (6) 4.2 主函数模块 (7) 5.系统调试 (10) 6.结论 (11) 7. 心得与体会 (13)
1.前言 指南针是用以判别方位的一种简单仪器,是一种重要的导航工具,可应用在多种场合中。指南针的前身是中国古代四大发明之一的司南。主要组成部分是一根装在轴上可以自由转动的磁针。磁针在地磁场作用下能保持在磁子午线的切线方向上。磁针的北极指向地理的北极,利用这一性能可以辨别方向。常用于航海、大地测量等方面。 随着人们对指南针原理认识的不断深入,指南针也由先前笨重的“司南”发展到现在的便携式的指南针。但其基本构造是没有改变的,都是属于机械的指针式,其指示的机械结构基本上没有改变,都是利用某种支撑使得磁针能够受到地磁场的影响而自由的旋转。由于机械的先天因素导致了指针式指南针在便携性、灵敏度、精度以及使用寿命上都有一定的限制。由于国内外电子技术的飞速发展,特别是在磁传感器和专用芯片上的发展使能指南针的基本实现机理有了质的改变,不再是机械结构而采用了磁场传感器和专用处理器对磁场进行测量和处理后指示方向,这就是当前应用较为广泛的电子式指南针。 电子指南针内部结构固定,没有移动部分,可以简单地和其它电子系统接口,因此可代替旧的磁指南针。并以精度高、稳定性好等特点得到了广泛运用。本设计采用Honeywell公司的各向异性磁阻(AMR)传感器芯片HMC5883L。霍尼韦尔HMC5883L是一种表面贴装的高集成模块,并带有数字接口的弱磁传感器芯片,HMC5883L包括最先进的高分辨率HMC118X系列磁阻传感器,并附带霍尼韦尔专利的集成电路包括放大器、自动消磁驱动器、偏差校准、能使指南针精度控制在1°~2°的12位模数转换器。简易的I2C 系列总线接口。HMC5883L采用霍各向异性磁阻(AMR)技术,该技术领先于这些各向异性传感器具有在轴向高灵敏度和线性高精度的特点。传感器具有的对正交轴的低灵敏度的固相结构能用于测量地球磁场的方向和大小,其测量范围从负8高斯到 8 高斯(gauss)。本文介绍了电子指南针的工作原理及电路硬件及软件的设计,同时给出了其抗干扰设计以及信号和数据的处理方法。
数字式电子罗盘毕业设计
毕业设计说明书数字式电子罗盘设计 学生姓名:孔垂礼学号: 1105044263 学院:计算机与控制工程 专业:电气工程及其自动化 指导教师:龙达峰 2015 年 06 月
数字式电子罗盘设计 摘要 数字式电子罗盘具有很多优点,例如:体积比较小、启动非常迅速、功率损耗较低、制造成本低廉等,当今社会测控技术对测向传感器提出了非常高的要求;为了提高数字 罗盘的测量精度,特意设计了一种基于HMC5883L三轴磁阻传感器[1]的数字电子罗盘;在分析相关类似产品的基础上,特别强调对电源、器件选型、信号调理电路、软件设计等方面进行了分析研究,设计出了数字罗盘并且研制了试验的样机;为验证设计效果,在双轴陀螺测试转台上进行了测试,试验结果初步验证了该设计方案的可行性;论文的研究 工作可以为研究和改良数字式磁罗盘的测量准确度提供可靠的资料. 关键词:地磁场,数字罗盘,HMC5883L三轴磁阻传感器,重力加速度计
Here is the translation of your chinese paper’s title Abstract Digital electronic compass, has small volume, quick start, low power consumption, and low cost, the modern measurement and control technology puts forward higher requirements on sensor of direction finding; In order to improve the precision of the digital compass, we design a HMC5883L triaxial magnetic resistance sensor based digital electronic compass; On the basis of the analysis of related products, focuses on the power supply, device selection, signal conditioning circuit and software design are analyzed in aspects of research, design the digital compass and test prototype was developed; To verify the design effect, on the two-axis gyro testing table was tested, experimental results verify the feasibility of the design scheme of; Thesis research work could be used to research and provide reference for improving the measuring accuracy of digital magnetic compass. Key words : Earth's magnetic field, digital compass, HMC5883L three-axis magnetic resistance sensor, the gravity accelerometer
点解原理及其应用
点解原理及其应用 1.(2017·滕州二中高三月考)下图所示装置中,已知电子由b 极沿导线流向锌。下列判断正确的是 ( ) A .该装置中Cu 极为阴极 B .一段时间后锌片质量减少 C .b 极反应的电极反应式为H 2-2e -+2OH - ===2H 2O D .当铜极的质量变化为32 g 时,a 极上消耗的O 2的体积为5.6 L 2.(2017·荆州中学高三上学期月考)利用控制n (H 2S)∶n (FeCl 3)=1∶2反应得到的产物再用电解法制氢,其工作原理如图所示。下列有关的说法错误的是( ) A .惰性电极a 发生氧化反应 B .Fe(OH)3胶体中滴加溶液X ,先有沉淀后沉淀溶解 C .溶液Y 加热蒸发灼烧最终得到Fe 2O 3 D .电解池总反应的离子方程式为2Fe 2++2H +=====电解2Fe 3++H 2↑ 3.(2017·陕西民院附中高三月考)早在1807年化学家戴维用电解熔融氢氧化钠制得钠,反应原理为4NaOH(熔融)=====电解4Na +O 2↑+2H 2O ;后来盖·吕萨克用铁与熔融氢氧化钠作用也制得钠,反应原理为3Fe +4NaOH=====1 100 ℃ Fe 3O 4+2H 2↑+4Na ↑。下列有关说法正确的是( ) A .电解熔融氢氧化钠制钠,阳极发生电极反应为Na ++e -===Na B .盖·吕萨克法制钠原理是利用铁的还原性比钠强 C .若戴维法与盖·吕萨克法制得等量的钠,则两反应中转移的电子总数比为2∶1
D.目前工业上常用电解熔融氯化钠法制钠(如图),电解槽中石墨极为阳极,铁为阴极 4.(2017·天水一中高三第一次月考)500 mL KNO3和Cu(NO3)2的混合溶液中c(NO-3)=6 mol·L-1,用石墨作电极电解此溶液,当通电一段时间后,两极均收集到22.4 L气体(标准状况),假定电解后溶液体积仍为500 mL,下列说法正确的是() A.上述电解过程中共转移2 mol电子 B.原混合溶液中c(K+)为2 mol·L-1 C.电解得到的Cu的物质的量为0.5 mol D.电解后溶液中c(H+)为2 mol·L-1 5.(2017·成都七中高三零模)高铁酸盐在能源环保领域有广泛用途。用镍(Ni)、铁作电极电解浓NaOH溶液制备高铁酸盐Na2FeO4的装置如图所示。下列推断合理的是() A.铁是阳极,电极反应为Fe-6e-+4H2O===FeO2-4+8H+ B.电解时电子的流动方向:负极→Ni电极→溶液→Fe电极→正极 C.若隔膜为阴离子交换膜,则电解结束后左侧溶液中含有FeO2-4 D.电解时阳极区pH 降低、阴极区pH升高,撤去隔膜混合后,与原溶液比较pH升高(假设电解前后体积变化忽略不计) 6.(2017·枣阳高中高三第一次月考)电解硫酸钠溶液生产硫酸和烧碱溶液的装置如图所示,其中阴极和阳极均为惰性电极。测得同温同压下,气体甲与气体乙的体积比约为1∶2,以下说法正确的是()