坐标误差修正技术
坐标误差修正技术
汤文骏 段敏谟 张玉坤 方仲彦
(清华大学精密仪器系精密测试技术及仪器国家重点实验室,北京100084)
摘 要 随着对产品加工和测量准确度的要求越来越高,利用误差修正技术实现低成本精度升级的方法已成为一个非常重要的研究领域。本文介绍了误差修正技术的特点、内容以及最新的发展情况。关键词 误差修正 坐标误差 实时修正
一、综 述
许多加工和测量设备都是三坐标机构,比如坐标测量机、加工中心等。坐标误差(或空间误差)指刀具或测头在空间的实际位置与名义位置之间的误差。坐标误差是机构误差、热误差、形变误差等许多误差因素的合成,它直接体现了设备的精度。
常用的提高精度的方法是避免误差,这种方法成本高,对环境要求也很苛刻。另一种提高设备精度的途径是误差修正技术,它是在已有设备基础上,
根据实际的误差在机器的控制
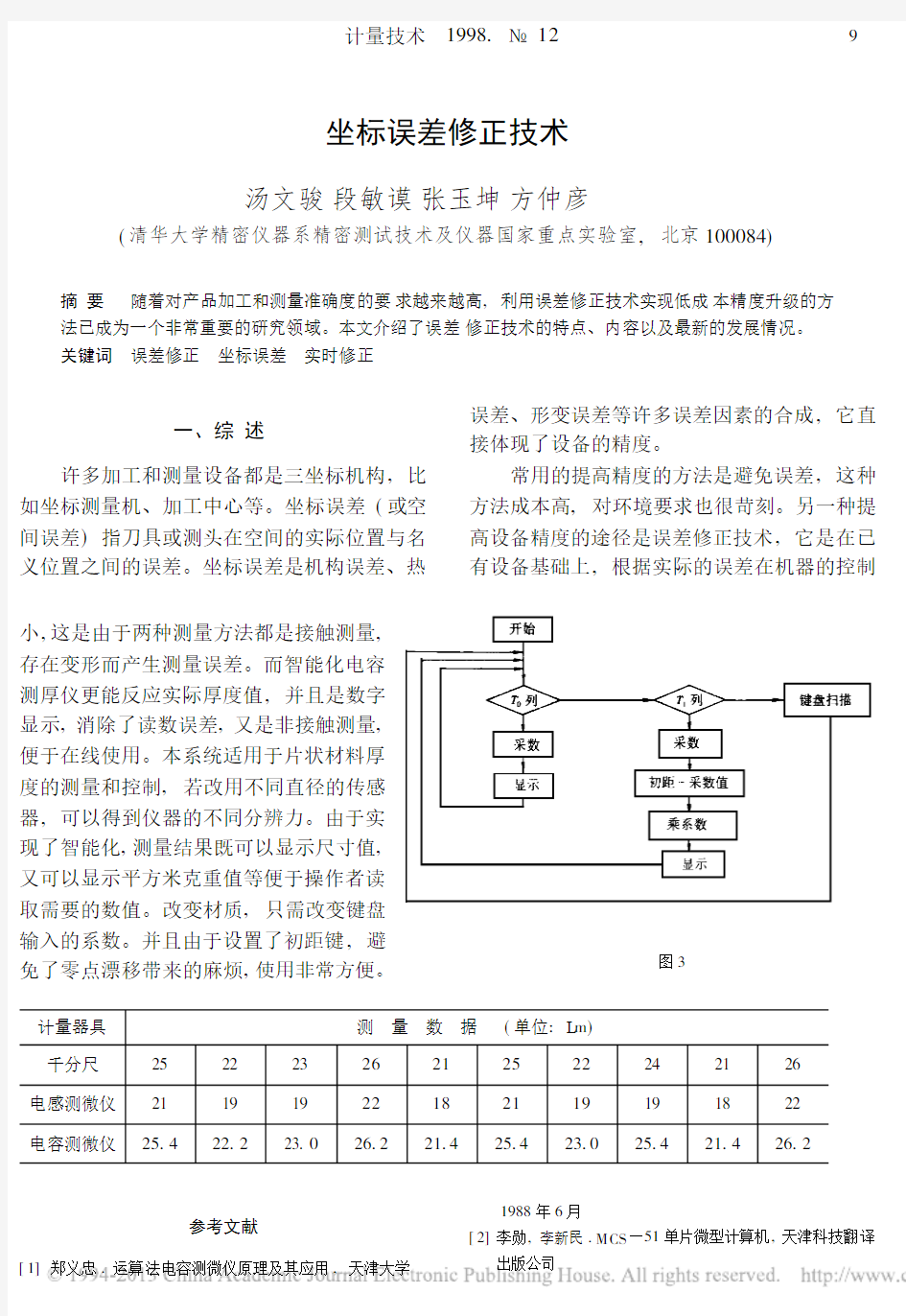
小,这是由于两种测量方法都是接触测量,存在变形而产生测量误差。而智能化电容测厚仪更能反应实际厚度值,并且是数字显示,消除了读数误差,又是非接触测量,便于在线使用。本系统适用于片状材料厚度的测量和控制,若改用不同直径的传感器,可以得到仪器的不同分辨力。由于实现了智能化,测量结果既可以显示尺寸值,又可以显示平方米克重值等便于操作者读取需要的数值。改变材质,只需改变键盘输入的系数。并且由于设置了初距键,避免了零点漂移带来的麻烦,使用非常方便。
图3
计量器具测 量 数 据 (单位:L m)千分尺25222326212522242126电感测微仪21191922182119191822电容测微仪
25.4
22.2
23.0
26.2
21.4
25.4
23.0
25.4
21.4
26.2
参考文献
[1]郑义忠.运算法电容测微仪原理及其应用,天津大学
1988年6月
[2]李勋,李新民.M CS —51单片微型计算机,天津科技翻译
出版公司
模块中加入误差修正模块,其特点是成本低、应用范围广。误差修正技术的内容有:误差分析、模型建立、误差测定和实现修正。
根据误差测定与实际运行的关系,可分为非实时修正和实时修正。前者事先测出误差项、存入计算机并且建立空间误差图,运行时根据误差图所预报的误差进行补偿,所以也称为软件修正,它只能修正系统误差。后者的这些误差项是在运行过程中实时测出的。实时修正设
备复杂且成本较高,但是能比较好地修正随机误差。
二、误差分析
坐标误差主要由以下误差构成:
1.空间机构误差
三坐标结构的21个误差项:每根轴上的三个位移量误差和三个角度误差以及三根轴之间的垂直度误差。位移量的误差直接表现在总误差上,而角度误差是以阿贝误差的形式出现的(角度乘以阿贝臂)。
2.热误差
热变形而引进的误差,是随机的误差因素。对总误差的影响是在机构误差上叠加上随机分量。在加工设备中,热误差是主要的误差项。在坐标测量机中,热误差并非十分显著。这是因为测量机的工作环境控制相对比较严格。
3.静态和动态形变误差
由于受力的原因,刀具或测头要产生形变。受力主要有重力、切削力等等。这项误差和机器的具体结构、布局有关。
三、机器模型[1]
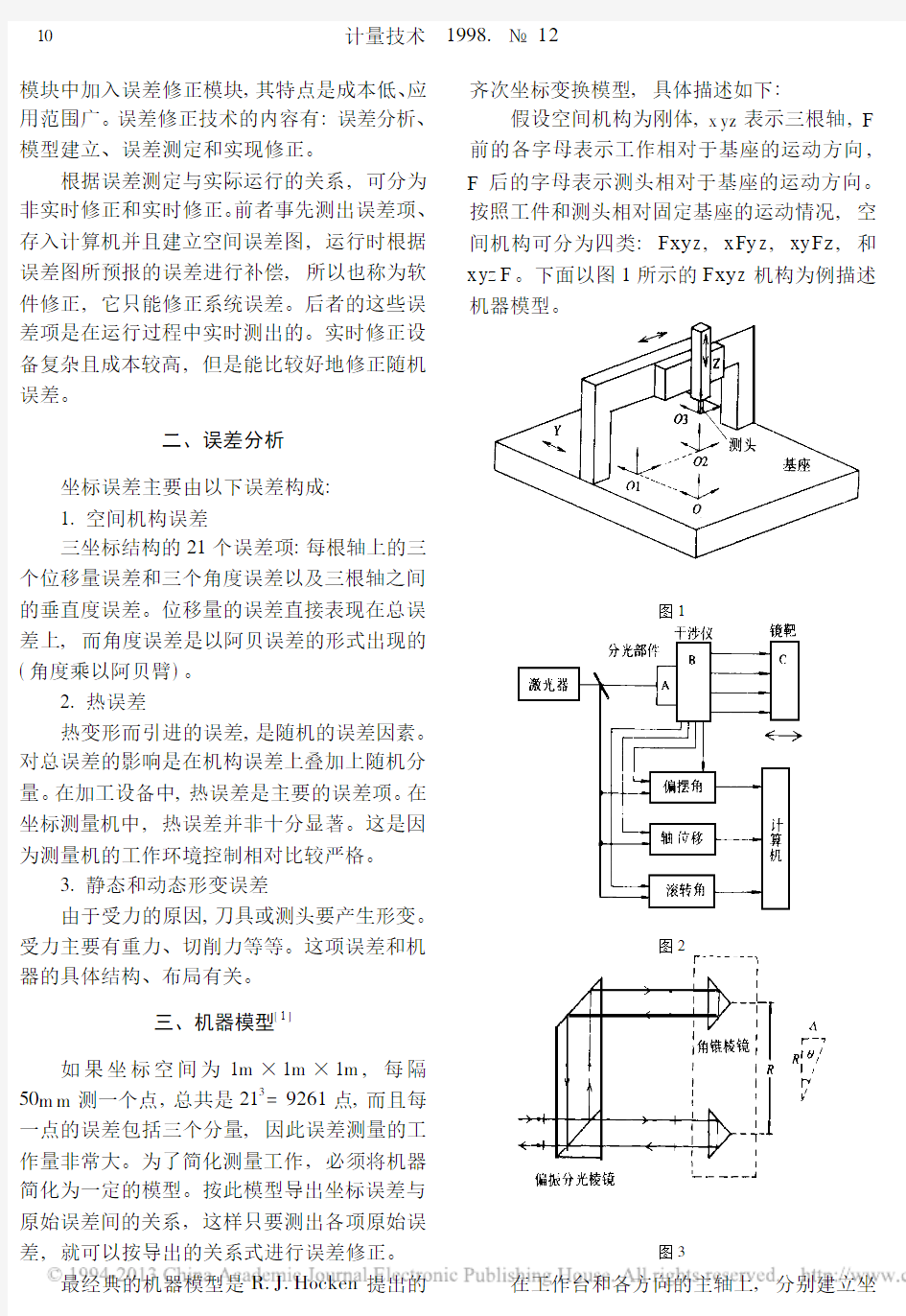
如果坐标空间为1m×1m×1m,每隔50m m测一个点,总共是213=9261点,而且每一点的误差包括三个分量,因此误差测量的工作量非常大。为了简化测量工作,必须将机器简化为一定的模型。按此模型导出坐标误差与原始误差间的关系,这样只要测出各项原始误差,
就可以按导出的关系式进行误差修正。最经典的机器模型是R.J.Hocken提出的齐次坐标变换模型,具体描述如下:
假设空间机构为刚体,x yz表示三根轴,F 前的各字母表示工作相对于基座的运动方向, F后的字母表示测头相对于基座的运动方向。按照工件和测头相对固定基座的运动情况,空间机构可分为四类:Fxy z,x Fy z,xy Fz,和x yz F。下面以图1所示的Fxy z机构为例描述机器模型。
图1
图2
图3
在工作台和各方向的主轴上,分别建立坐
标系(共四个),它们的原始位置是重合在一起的;当坐标测量机各运动部件按照给定指令移过(X s ,Y s ,Z s )时,在主轴坐标系中,空间任意点P (X p ,Y p ,Z p )在工作台坐标系(X YZ )中的坐标矢量O P (X ′,Y ′,Z ′)可通过下式表达:
OP =O O 1+R -1
1[R -1
2(R -1
3O 3P +O 2O 3)+
O 1O 2](1)式(1)中O O 1、O 1O 2、O 2O 3为坐标原点平移矢量,
R 1、R 2、R 3为坐标系旋转矩阵。
坐标误差$X 为:$X =X ′
-X s -X p (2)
根据式(1)、(2)可以得到P 点的X 方向的
误差分量的表达式。同理可以得到$Y 和$Z ,这三个表达式就是误差修正的依据。
四、误差测量
实时修正和非实时修正都需要精确地测定坐标测量机的各项机构误差。线位移可分为两
类:定位误差和直线度;角位移可分为三类:俯仰、偏摆和滚转。定位误差可以用激光干涉仪来测定,直线度误差可以用带直线度附件的激光干涉仪来测定。俯仰和偏摆可通过光电自准直管或激光干涉仪来测定,滚转角的测量是最困难的,目前使用过的方法有差动电子水平仪测量、磁光效应测量等。
目前的实时修正方案都要设计安装一些多功能测量装置,用来同时测量多项误差。对于不能实时测量的误差则采用非实时的方法预先测定。
下面介绍两种多功能测量装置:
1、多通道激光干涉仪
[2]
此套系统可以同时测定导轨的所有三个转角误差的轴向定位误差。系统采用二元光学器件进行分光,将光束分成等光强的四束,第一束光被用来测定定位误差,第二、三束光用来测定偏摆角和俯仰角,最后一束用来测定滚转角误差。镜靶安装在移动的工作台上,分光部件和所有的干涉仪部件则固定在基座上。
利用激光干涉仪进行位移测量的准确度是非常高的,此系统的定位误差的测量不确定度
可以≤0.2L m 。偏转角和俯仰角的测量干涉仪如图3所示,干涉仪测出的是两个反射棱镜光路沿光轴方向的位移差$,R 是固定距离,这样按H =$/R 得到转角误差。实验表明这两项误差的测量也达到了很高的精度(0.1″)。滚转角的高准确度测量是十分困难的。此系统中用的是基于法拉第磁致旋光效应的滚转角误差动态测量方法。实验表明测量分辨力可达到0.1″,稳定性偏差为0.36″。
这样每个方向上的角位移加上线位移共四项误差可以测出,另外两项是直线度误差,也可以很方便地用非实时测出。
2.组合光栅测量系统[3]
许多机床和测量装置都是以计量光栅作为位置传感器件。由于结构的原因,很多设备的光栅安装无法符合阿贝原则,因此造成比较严重的阿贝误差。组合光栅测量系统就是在阿贝臂的方向上安装两根光栅,通过实时的读数比较来得到转角误差,从而实现误差修正。
图4
图4是我们在一台万能工具显微镜上实现的组合光栅测量系统。坐标系OX YZ 为万工显的瞄准坐标系,根据万工显的结构特点一共安装了五根光栅(G 1~G 5)。沿X 方向运动时,由G 1、G 2的读数差和已知的$Z X 可以得到俯仰角E y (X ),由G 1、G 3读数差和$Y X 可以得到偏摆角E Z (X );沿Y 方向运动时,由G 4、G 5的读数差和$Z Y 可以得到俯仰角E X (Y ),由于光栅安装在YOZ 平面内,所以在偏摆角的方向上符合阿贝原则,因此不必修正此项误差。
通过组合光栅测量系统可以实时测量多项转角误差,修正对设备精度影响很大的阿贝误差,从而显著提高设备精度。
五、误差修正
误差修正的工作是用计算机软件实现的。实时测量装置通过接口电路将结果传送到计算机,非实时测量的误差已经事先测定并存入计算机的数据内存中。测量软件将实时和非实时测定的结果综合起来根据误差公式来修正坐标误差,得到修正后的新的测量结果。误差修正的检定一般有两种方法:一是测量尺寸形貌准确度很高的工件,如量块等,比较原始测量结果、修正测量结果和量块真实尺寸,得到修正前误差和修正后误差;另一种是用高准确度的测量装置(如双频激光干涉仪)测量空间任意斜线,并将测量结果与坐标测量机测量的结果进行比较。
许多修正方案效果是很显著的。我们实验室采用多通道激光干涉仪进行误差修正实验,在3.7m行程内把阿贝误差从37L m减小到1.5L m[2]。
参考文献
[1]张国雄.误差修正——提高坐标测量机精度的重要方向.
机床,1986.№3
[2]谢广平.违阿贝结构阿贝误差实时修正方法的研究.清
华大学博士论文,1995
[3]汤文骏.阿贝误差实时修正坐标测量系统的设计与研究.
清华大学毕业设计论文,1996
凸轮轴综合测量与误差评定方法研究
张茂定 赖华清 姚雄杰
(湖北汽车工业学院,十堰442002)
摘 要 本文介绍了发动机凸轮轴综合检测系统的原理,利用均匀三次B样条曲线拟合任意平面曲线的数学模型,提出了凸轮轴综合参数误差评定方法,并用实测结果进行了验证。
关键词 凸轮轴 综合测量 B样条曲线 误差评定
一、前 言
凸轮轴的功用是按一定运动规律控制气门组定时开、闭发动机气缸进、排气门,使新鲜混合气及时进入气缸,燃烧后的废气及时排出气缸。凸轮轮廓的尺寸和形状误差是影响气门开、闭间隙大小和配气效率的主要因素。一般发动机凸轮的尺寸误差为0.1m m,形状误差小于0.03mm,每2°范围内的形状误差小于0.01mm。目前,凸轮轴的测量主要是采用机械量仪或样板测量,这些测量方法只能定性测量其误差,测量准确度和效率均较低。为此,我们研究出了高准确度、高效率、适合多品种发动机凸轮轴的综合测量仪。
二、凸轮轴综合测量系统原理
图1为综合测量系统原理图。光栅传感器将凸轮的径向位移转换成明暗条纹的光强变化信号,由光电转换电路转换成电压信号,经前置放大和整形细分,最后由A/D转换成数字信号送入计算机。同时,感应同步器的定尺与滑尺绕组将凸轮轴的角位移转换成电压信号,经相敏放大、A/D转换成数字信号也送入计算机。经计算机处理后就获取凸轮径向测点值P i (t)。
误差理论与数据处理试题范文
误差分析与数据处理 一.填空题 1. ______(3S或莱以特)准则是最常用也是最简单的判别粗大误差的准则。 2. 随机误差的合成可按标准差和______(极限误差)两种方式进行。 3. 在相同测量条件下,对同一被测量进行连续多次测量所得结果之间的一致性称为 ______(重复)性。 4. 在改变了的测量条件下,同一被测量的测量结果之间的一致性称为______(重现)性。 5. 测量准确度是指测量结果与被测量______(真值)之间的一致程度。 6. 根据测量条件是否发生变化分类,可分为等权测量和______(不等权)测量。 7. 根据被测量对象在测量过程中所处的状态分分类,可分为静态测量和_____(动态) 测量。 8. 根据对测量结果的要求分类,可分为工程测量和_____(精密)测量。 9. 真值可分为理论真值和____(约定)真值。 10. 反正弦分布的特点是该随机误差与某一角度成_____(正弦)关系。 11. 在相同条件下,对同一物理量进行多次测量时,误差的大小和正负总保持不变,或按一定的规律变化,或是有规律地重复。这种误差称为______(系统误差)。 12. 在相同条件下,对某一物理量进行多次测量时,每次测量的结果有差异,其差异的大小和符号以不可预定的方式变化着。这种误差称为______(偶然误差或随机误差)。 13. 系统误差主要来自仪器误差、________(方法误差)、人员误差三方面。 14. 仪器误差主要包括_________(示值误差)、零值误差、仪器机构和附件误差。 15. 方法误差是由于实验理论、实验方法或_________(实验条件)不合要求而引起的误差。 16. 精密度高是指在多次测量中,数据的离散性小,_________(随机)误差小。 17. 准确度高是指多次测量中,数据的平均值偏离真值的程度小,_________(系统)误差小。 18. 精确度高是指在多次测量中,数据比较集中,且逼近真值,即测量结果中的 _________(系统)误差和_________(随机)误差都比较小。 19. 用代数方法与未修正测量结果相加,以补偿其系统误差的值称为_____(修正值)。 20. 标准偏差的大小表征了随机误差的_____(分散)程度。 21. 偏态系数描述了测量总体及其误差分布的_____(非对称)程度。 22. 协方差表示了两变量间的_____(相关)程度。 23. 超出在规定条件下预期的误差称为_____(粗大)误差。 24. +=_____() 25. ++=_____() 26. () 28. pH=的有效数字是____(2)位。 29. 保留三位有效数字,结果为____。 30. 为补偿系统误差而与未修正测量结果相乘的数字因子称为______(修正因子)。 一、检定一只5mA、级电流表的误差。按规定,要求所使用的标准仪器产生的误差不大于受检仪器允许误差的1/3。现有下列3 只标准电流表,问选用哪一只最为合适,为什么? (本题10 分) (1)15mA级(2)10mA级(3)15mA级
误差修正模型实例(精)
一、误差修正模型的构造 对于yt的(1,1阶自回归分布滞后模型: 在模型两端同时减yt-1,在模型右端,得: 其中,,,。 记(5-5) 则(5-6) 称模型(5-6)为“误差修正模型”,简称ECM。 二、误差修正模型的含义 如果yt ~ I(1,x t ~ I(1,则模型(5-6)左端,右端,所以只有当yt和x t协整、即yt和x t之间存在长期均衡关系时,式(5-5)中的ecm~I(0,模型(5-6)两端的平稳性才会相同。 当yt和x t协整时,设协整回归方程为:
它反映了yt与x t的长期均衡关系,所以称式(5-5)中的ecm t-1是前一期的“非均衡误差”,称误差修正模型(5-6) 中的是误差修正项,是 修正系数,由于通常 ,这样;当ecm t-1 >0时(即出现正误差),误差修正项< 0,而ecm t-1 < 0时(即出现负误差), > 0,两者的方向恰好相反,所以,误差修正是一个反向 调整过程(负反馈机制)。 误差修正模型有以下几个明确的含义: 1.均衡的偏差调整机制 2.协整与长期均衡的关系 3.经济变量的长期与短期变化模型 长期趋势模型: 短期波动模型: 三、误差修正模型的估计 建立ECM的具体步骤为: 1.检验被解释变量y与解释变量x(可以是多个变量)之间的协整性; 2.如果y与x存在协整关系,估计协整回归方程,计算残差序列e t:
3.将e t-1作为一个解释变量,估计误差修正模型: 说明: (1)第1步协整检验中,如果残差是确定趋势过程,可以在第2步的协整回归方程中加入趋势变量; (2)第2步可以估计动态自回归分布滞后模型: 此时,长期参数为: 协整回归方程和残差也相应取成: , (3)第2步估计出ECM之后,可以检验模型的残差是否存在长期趋势和自相关性。如果存在长期趋势,则在ECM中加入趋势变量。如果存在自相关性,则在ECM的右端加入 误差修正项的滞后期一般也要作相应 调整。 如取成以下形式:
协整检验及误差修正模型实验指导
协整检验及误差修正模型实验指导 一、实验目的 理解经济时间序列之间的理论关系,并学会用统计方法验证他们之间的关系。学会验证时间序列存在的不平稳性,掌握ADF检验平稳性的方法。认识不平稳的序列容易导致虚假回归问题,掌握为解决虚假回归问题引出的协整检验,协整的概念和具体的协整检验过程。协整描述了变量之间的长期关系,为了进一步研究变量之间的短期均衡是否存在,掌握误差纠正模型方法。 二、实验内容及要求 1、实验内容 用Eviews来分析1982年到2002年中国居民实际消费支出的对数序列和中国居民实际可支配收入的对数序列{}之间的关系。内容包括: (1)对两个对数序列分别进行ADF平稳性检验; (2)进行二者之间的协整关系检验; (3)若存在协整关系,建立误差修正模型ECM。 2、实验要求 (1)在认真理解本章内容的基础上,通过实验掌握ADF检验平稳性的方法; (2)掌握具体的协整检验过程,以及误差修正模型的建立方法; (3)能对宏观经济变量间的长期均衡关系进行分析。 三、实验指导 1、对两个数据序列分别进行平稳性检验: (1)做时序图看二者的平稳性 在workfile中按住ctrl选择要检验的二变量,击右键,选择open—as group,此时他们可以作为一个数据组被打开。点击“View”―“graph”—“line”,得到两个序列的时序图。 给出两个序列的时序图。 从上图可以看出两个序列都呈上升趋势,显然不平稳,但二者有大致相同的增长和变化趋势,说明二者可能存在协整关系。但若要证实二者有协整关系,必须先看二者的单整阶数,如果都是一阶单整,则可能存在协整关系,若单整地阶数不相同,则需采取差分的方式,
误差修正模型
第二节 误差修正模型(Error Correction Model ,ECM ) 一、误差修正模型的构造 对于y t 的(1,1)阶自回归分布滞后模型: t t t t t y x x y εβββα++++=--12110 在模型两端同时减y t-1,在模型右端10-±t x β,得: t t t t t t t t t t t t t x y x x y x y x x y εααγβεββββαββεββββα+--+?=+---+--+?=+-+++?+=?------)(]) 1()1()[1()1()(1101012120120121100 其中,12-=βγ,)1/()(200ββαα-+=,)1/(211ββα-=。 记 11011-----=t t t x y ecm αα (5-5) 则 t t t t ecm x y εγβ++?=?-10 (5-6) 称模型(5-6)为“误差修正模型”,简称ECM 。 二、误差修正模型的含义 如果y t ~ I(1),x t ~ I(1),则模型(5-6)左端)0(~I y t ?,右端)0(~I x t ?,所以只有当y t 和x t 协整、即y t 和x t 之间存在长期均衡关系时,式(5-5)中的ecm~I(0),模型(5-6)两端的平稳性才会相同。 当y t 和x t 协整时,设协整回归方程为: t t t x y εαα++=10 它反映了y t 与x t 的长期均衡关系,所以称式(5-5)中的ecm t -1
是前一期的“非均衡误差”,称误差修正模型(5-6)中的1-t ecm γ是误差修正项,12-=βγ是修正系数,由于通常1||2<β,这样 0<γ; 当ecm t -1 >0时(即出现正误差),误差修正项1-t ecm γ< 0,而ecm t -1 < 0时(即出现负误差),1-t ecm γ> 0,两者的方向恰 好相反,所以,误差修正是一个反向调整过程(负反馈机制)。 误差修正模型有以下几个明确的含义: 1.均衡的偏差调整机制 2.协整与长期均衡的关系 3.经济变量的长期与短期变化模型 长期趋势模型: t t t x y εαα++=10 短期波动模型: t t t t ecm x y εγβ++?=?-10 三、误差修正模型的估计 建立ECM 的具体步骤为: 1.检验被解释变量y 与解释变量x (可以是多个变量)之间的协整性; 2.如果y 与x 存在协整关系,估计协整回归方程,计算残差序列e t : t t t x y εβα++=0 t t t x y e 0??βα--= 3.将e t-1作为一个解释变量,估计误差修正模型: t t t t v e x y ++?=?-10γβ 说明: (1)第1步协整检验中,如果残差是确定趋势过程,可以在第2步的协整回归方程中加入趋势变量; (2)第2步可以估计动态自回归分布滞后模型: t i t i i t i t y x y εβαα∑∑+++=-- 此时,长期参数为: ∑∑-=)1(i i βαθ 协整回归方程和残差也相应取成:
消除系统误差的方法
减少系统误差的方法 消除或减少系统误差有两个基本方法。一就是事先研究系统误差的性质与大小,以修正量的方式,从测量结果中予以修正;二就是根据系统误差的性质,在测量时选择适当的测量方法,使系统误差相互抵消 而不带入测量结果。 1、采用修正值方法 对于定值系统误差可以采取修正措施。一般采用加修正值的方法。对于间接测量结果的修正,可以在每个直接测量结果上修正后,根据 函数关系式计算出测量结果。修正值可以逐一求出,也可以根据拟合曲线求出。应该指出的就是,修正值本身也有误差。所以测量结果经修正后并不就是真值,只就是比未修正的测得值更接近真值。它仍就是被测量的一个估计值,所以仍需对测量结果的不确定度作出估计。 2、从产生根源消除 用排除误差源的办法来消除系统误差就是比较好的办法。这就要求测量者对所用标准装置,测量环境条件,测量方法等进行仔细分析、研究,尽可能找出产生系统误差的根源,进而采取措施。 采用专门的方法 (1)交换法:在测量中将某些条件,如被测物的位置相互交换,使产生系统误差的原因对测量结果起相反作用,从而达到抵消系统 误差的目的。如用电桥测电阻,电桥平衡时,R X=R0(R1/R2),保持 R1、R2不变,把Rx、R0的位置互换,电桥再次平衡时,R0变成R’,
此时Rx=R0’(R2/R1)。于就是有Rx=R0`(R2/R1),由此算出的 Rx就可以消除由R1、R2带来的系统误差。 (2)替代法:替代法要求进行两次测量,第一次对被测量进行测量,达 到平衡后,在不改变测量条件情况下,立即用一个已知标准值替代被 测量,如果测量装置还能达到平衡,则被测量就等于已知标准值。如果不能达到平衡,修整使之平衡。替代法就是指直截了当地测定物理量的方法。如:利用精密天平的称重。设待测重量为x ,当天平达到平衡时所加砝码重量为Q ,天平的两臂长度各为l1 与l2 ,平衡时有x = Q ·l2/ ll 。再用已知标准砝码P 代替x , 平衡时有P = Q ·l2/ l1 ,得到x = P。若用标准砝码置换未知重量后,天平失去平衡,需加一差值△P , 才出现平衡, 这时有P + △P = Q ·l2/ l1 ,所以x = P + △P( △P 可正可负) 。这样就可消除由于天平两臂不等而带来的系统误差。 (3)补偿法:补偿法要求进行两次测量,改变测量中某些条件,使两次 测量结果中,得到误差值大小相等、符号相反,取这两次测量的算术平均值作为测量结果,从而抵消系统误差。如读数显微镜、千分尺等都存在空行程,这就是系统误差,设其为l,为消除这一误差,可从两个方向分别读数,第一次顺时针旋转,读得数据为L1,则被测量长度D 为:D=L1+l:第二次逆时针旋转读得数据为L2,则被测量长度为 D=L2-l,于就是D=(L1+L2)/2,这样系统误差l被消除,某些不等位电势、温度引起的温差电势、磁场对磁电系仪表的影响等也可以用这种办法来消除。
罗盘误差修正
罗盘的检验和误差纠正 “风水罗盘的校验和误差纠正”这是当今所有风水大师和所有风水爱好者的必修课。很多“风水大师”和“风水写书人”都会说:“一度之差,天壤之别,吉、凶两重天”,但你能肯定你的罗盘没有“角度指示误差”吗?你是如何认定的呢?你如果不知道罗盘会有什么样的经常被人们忽略了的但却是“很重要的误差”,你那“大师”怎么当的?都是忽悠罢了? 在当今,中国传统文化的光辉重新普照大地之时,风水设计和风水勘测已经被更广大的民众所了解和认可,很多人也开始学习并涉足于其中。风水学,在其实际使用中,最关键之处就在于“对坐向方位的勘测”,所必需的首要工具,当然首选专业的“风水罗盘”。 但在用罗盘来进行实地勘测操作时,很多风水师(或者风水学学习爱好者)会发现,对同一个被勘测的对象,在同一个位置,以同样的方法,用不同的罗盘进行测量时,往往几个罗盘所测得的结果相互之间的坐向角度值(度数)总会有些不一样,存在一些误差,到底以哪一个罗盘的数据为准呢?大家都莫终于是,即便换人来测也是如此,而且往往在很多时候就这么一两度之差,就是“吉”、“凶”两重天,到底该如何来评判呢?这常常会给人一种不好的印象,似乎只能由风水大师各说各有理了,谁说了都算又都不算,让人们无所适从了。这种现象势必会影响风水学的可靠信和可信度了。 这个问题出在哪里呢?我们先不论个人操作方法的对错以及技术上的熟练和否,先来谈一谈罗盘本身。 在我们忽略了使用者个人的人为误差之后,问题的主要根源也就在于“罗盘的“制造误差”上”了。理论上,一个精准的罗盘,它的外盘(正方形底座)上的“十字型指标线的十字心(交叉点)”和内盘(转盘)的旋转轴心线应该是能重合的,以此同时,内盘中央的“指南针表盘”之“米字线”之中心点也应该和内盘(转盘)之“旋转轴心线”重合,而且指南针的“指针之转轴”也应该和“转盘的旋转轴心线”重合,指南针表盘内的米字线之“北、东、南、西正十字线”要正对内盘(转盘)360度分度的“0°”、“90°”、“180°”、“270°”刻度,不仅如此,旋转内盘时,还要求外盘(正方形底盘)上的“十字形指标线”必须能够同时正压在内盘(转盘)圆周360度分度的“0°”、“90°”、“180°”、“270°”刻度线上,不能有偏差,无论从哪个方向旋转内盘,无论旋转多少次都必须如此能够回到这样的状态。 然而,这仅仅是理论上的一个标准,实际在罗盘的生产制造和零部件安装过程中,“误差”始终是难免的,完全百分之百符合标准的“绝对精准的罗盘”几乎是不存在的,即便是有,在概率上也差不多只能是“万里挑一”甚至“十万里挑一”。如果一定要求“绝对精准”的话,所有的生产也就只能停工了,因为没有人能做得到。在电脑上进行图形设计可以做得非常精准,但这并不能保证生产加工没有误差。 那么,既然如此,我们是否就没有办法克服生产加工造成的罗盘误差对实际勘测工作的影响了呢?也并非如此。我们只需要做好以下这几步准备工作,就
协整检验及误差修正模型实验指导
实验八 协整检验及误差修正模型实验指导 一、实验目的 理解经济时间序列之间的理论关系,并学会用统计方法验证他们之间的关系。学会验证时间序列存在的不平稳性,掌握ADF 检验平稳性的方法。认识不平稳的序列容易导致虚假回归问题,掌握为解决虚假回归问题引出的协整检验,协整的概念和具体的协整检验过程。协整描述了变量之间的长期关系,为了进一步研究变量之间的短期均衡是否存在,掌握误差纠正模型方法。 二、基本概念 设随机向量t X 中所含分量均为d 阶单整,记为t X I(d ):。如果存在一个非零向量β,使得随机向量()~t t Y X I d b =-β,0b >,则称随机向量t X 具有d ,b 阶协整关系,记为t X CI(d ,b ):,向量β被称为协整向量。特别地,t y 和t x 为随机变量,并且t y ,~(1)t x I ,当01()~I(0)t t t y x εββ=-+,即t y 和t x 的线性组合与I(0)变量有相同的统计性质,则称t y 和t x 是协整的,()01,ββ称为协整系数。更一般地,如果一些I(1)变量的线性组合是I(0),那么我们就称这些变量是协整的。 三、实验内容及要求 1、实验内容 用Eviews5.1来分析1978年到2002年中国农村居民对数生活费支出序列{ln }t y 和对数人均纯收入{ln t x }序列之间的关系。内容包括: (1)对两个对数序列分别进行ADF 平稳性检验; (2)进行二者之间的协整关系检验; (3)若存在协整关系,建立误差纠正模型ECM 。 2、实验要求 (1)在认真理解本章内容的基础上,通过实验掌握ADF 检验平稳性的方法; (2)掌握具体的协整检验过程,以及误差纠正模型的建立方法; (3)能对宏观经济变量间的长期均衡关系进行分析。 四、实验指导 1、对两个数据序列分别进行平稳性检验: (1)做时序图看二者的平稳性 首先按前面介绍的方法导入数据,在workfile 中按住ctrl 选择要检验的二变量,击右键,选择open —as group ,此时他们可以作为一个数据组被打开。 点击“View ”―“graph ”—“line ”,对两个序列做时序图见图8-1,两个序列都呈上升趋势,显然不平稳,但二者有大致相同的增长和变化趋势,说明二者可能存在协整关系。但若要证实二者有协整关系,必须先看二者的单整阶数,如果都是一阶单整,则可能存在协整关系,若单整地阶数不相同,则需采取差分的方式,将他们变成一阶单整序列。 图8-1 ln t x 和ln t y 时序图
误差 偏差 修正值
误差偏差修正值 摘要:本文主要是通过实例说明对几个术语的理解,共四个部分、12例,内容涉及: 1 术语的概念、定义的理解;偏差对于不同对象的适用性; 2 术语间的关系与区别,特别是误差与偏差。在特定条件下、二者在数值或绝对值上相等(但概念不同); 3 误差与偏差的应用,主要说明误差、偏差检定结果计算(简便的也是常用的)方法的依据; 4 修正值与修正因数的关系和应用。 0 引言 术语是一个学科的专用语。它概念清楚,定义准确、严格,在文字、语言表述交流中可以简单明确地反映所要传递的内容。因此,各个学科都有自己的术语。误差、偏差、修正值是计量领域最通用、使用频率很高的术语,在计量技术规范JJF1001—1998《通用计量术语及定义》(,以下简称“术语”)中有明确定义。正确使用这几个术语有助于反映、处理有关量值之间的关系。但由于对定义理解的不同(如“偏差”的定义)或历史上的、习惯上的认识,有时难免在
实用中使用不当、混淆、歧义甚至错误以及有的技术文献解释上的矛盾。本文准备对这几个术语的定义、相互关系的理解和应用谈一些看法。 1 对定义的理解 1.1 误差 1.1.1 〔测量〕误差 其定义为:“测量结果减去被测量的真值。”由于真值的不可确知,“术语”定义中是用约定真值替代真值。被测量的真值可以理解为被测量的实际值。测量误差一般是由多个随机效应与系统效应所导致,所以在排除粗大误差条件下,误差包括随机误差和系统误差。 1.1.2 测量仪器的〔示值〕误差 测量仪器的〔示值〕误差与〔测量〕误差的定义不同,它是指“仪器的示值与对应输入量的真值之差”。虽然根据“术语”中“测量结果”的说明,仪器的示值属于“测量结果”,但“被测量”有别于“对应输入量”。“被测量”通常包括一组输入量,而“对应输入量”应是指和仪器示值同种量(可以相互比较并按大小排序的量),一般为校准和检定中上级标准器的复现量。测量仪器的误差是系统误差,它是测量误差的主要分量。在特定条件下仪器的示值误差就是测量误差。 1.2 偏差 “术语”中这一术语的定义为:“一个值减去参考值。” 为了说明、表达两个量值间的关系,根据实际需要规定的可用于比较的量值都可作为一个值的参考值。例如: 1.2.1〔实物〕量具偏差 量具的标称值就是实际值的参考值。因此, 偏差=实际值—标称值。 例1 标称值m B为500g的砝码,经校准实际值mH为500.015g,则其偏差dm为: dm=mH-m B=500.015
坐标误差修正技术
坐标误差修正技术 汤文骏 段敏谟 张玉坤 方仲彦 (清华大学精密仪器系精密测试技术及仪器国家重点实验室,北京100084) 摘 要 随着对产品加工和测量准确度的要求越来越高,利用误差修正技术实现低成本精度升级的方法已成为一个非常重要的研究领域。本文介绍了误差修正技术的特点、内容以及最新的发展情况。关键词 误差修正 坐标误差 实时修正 一、综 述 许多加工和测量设备都是三坐标机构,比如坐标测量机、加工中心等。坐标误差(或空间误差)指刀具或测头在空间的实际位置与名义位置之间的误差。坐标误差是机构误差、热误差、形变误差等许多误差因素的合成,它直接体现了设备的精度。 常用的提高精度的方法是避免误差,这种方法成本高,对环境要求也很苛刻。另一种提高设备精度的途径是误差修正技术,它是在已有设备基础上, 根据实际的误差在机器的控制 小,这是由于两种测量方法都是接触测量,存在变形而产生测量误差。而智能化电容测厚仪更能反应实际厚度值,并且是数字显示,消除了读数误差,又是非接触测量,便于在线使用。本系统适用于片状材料厚度的测量和控制,若改用不同直径的传感器,可以得到仪器的不同分辨力。由于实现了智能化,测量结果既可以显示尺寸值,又可以显示平方米克重值等便于操作者读取需要的数值。改变材质,只需改变键盘输入的系数。并且由于设置了初距键,避免了零点漂移带来的麻烦,使用非常方便。 图3 计量器具测 量 数 据 (单位:L m)千分尺25222326212522242126电感测微仪21191922182119191822电容测微仪 25.4 22.2 23.0 26.2 21.4 25.4 23.0 25.4 21.4 26.2 参考文献 [1]郑义忠.运算法电容测微仪原理及其应用,天津大学 1988年6月 [2]李勋,李新民.M CS —51单片微型计算机,天津科技翻译 出版公司
误差理论与数据处理期末判断
三、判断题 1、研究误差的目的之一是正确组织实验,合理设计或选项用仪器和测量方法,以获得经济合理测量结果。 ( F ) 2、测量不确定度是客观存在的,且不以人的认识程度而改变。(T) 3、在近似数乘除运算时,最后结果应与有效位数最少的数据位数相同。(T ) 4、标准不确定度的评定方法有A类评定和B类评定,其中A类评定精度比B类评定精度高。( F ) 5、电视歌手大奖赛中去除最高分与最低分的做法是为了排除系统误差的影响。( F ) 6、用贝塞尔公式计算标准不确定度者属于B类评定。( F ) 7、不确定度的可信程度与其自由度有密切关系,自由度越大,则不确定度越可信。(T ) 8、残余误差较核法可以发现固定系统误差和变化系统误差。(F )y x,y x i?1,2.....n(的一组数据和9、根据两个变量,),由最小二乘法得到回归直线,ii y x线性关系密切。由此可以推断和(T ) 10、观察数据本身的精度越高,则所得到的回归方程越稳定。(F ) 一、判断题(本大题共10小题,每小题1分,共10分) 判断下列各题,正确的在题后括号内打“√”,错的打“×”。 1.研究误差的意义之一就是为了分析误差产生的原因,以消除或减小误差。(√) P1 2.绝对误差的大小反映了测量的精度。(×) P2 3.环境对测量结果没有影响。(×) P3 4.精确度反映了测量误差的大小。(√) P4 5.在测量结果中,小数点后的位数越多越好。(×) P6 6.单次测量的标准差σ就是测量列中任何一个测得值的随机误差。(×) P14 7.只要是系统误差,就可以进行修正。(×) P40 8.测量不确定度,就是测量值还不能确定的意思。(×) P79 9.不确定度与误差的概念具有相同的内涵。(×) P80 10.系统误差的大小,反映了测量的准确度。(√) P4 二、是非题(每小题1分,共10分,对的打√,错的打×) (F )1.由于误差是测量结果减去被测量的真值,所以误差是个准确值。 ( F )2.测量不确定度是说明测量分散性的参数。 ( F )3.标准不确定度是以测量误差来表示的。 ( F )4.误差与不确定度是同一个概念,二种说法。 4 / 1. ( T)5. 半周期法能消除周期性系统误差 ( T )6.A类评定的不确定度对应于随机误差。 ( T )7.A类不确定度的评定方法为统计方法。 ( T )8.B类不确定度的评定方法为非统计方法。 ( T )9.测量不确定度是客观存在,不以人的认识程度而改变。 ( T )10.标准不确定度是以标准偏差来表示的测量不确定度。 ( T )11.数学模型不是唯一的,如果采用不同的测量方法和不同的测量程序,就可能有不同的数学模型。
第5章 动态回归与误差修正模型(案例)汇总
例:(file: break2)东北、华北、华东、华中21省市1993和1998年耕地面积(land ,百万公顷)和农业产值(Y , 百亿元)数据见图(已取对数)。用圆圈表示的观测点为1993年数据,用三角表示的观测点为1998年数据。大体看各省市1998年耕地面积比1993年耕地面积略有减少,产值却都有增加。以1993和1998年数据为两个子样本,以42个数据为总样本,求得残差平方和见下表 -10 12 3 -2 -1 1 2 3 LOG(LAND) LOG(Y93)LOG(Y98) -10 1 2 3 -2 -1 1 2 3 LOG(LAND) LOG(Y93)LOG(Y98) 样本容量 残差平方和 相应自由度 回归系数 1 T = 42 SSE T = 14.26 T - k = 40 2 n 1= 21 SSE 1 = 4.37 n 1 - k = 19 α1 3 n 2= 21 SSE 2 = 3.76 n 2 - k = 19 β1 注:三次回归的模型形式Lnout t = β0 +β1 Lnland t + u t 。 因为, F = ) 2/()(/)]([2121k T SSE SSE k SSE SSE SSE T -++-= 38 /)76.337.4(2 /)]76.337.4(26.14[++-= 14.33 > F (1, 40) = 7.31
所以两个年度21省市的农业生产发生了很大变化。
案例1:开滦煤矿利润影响因素的实证分析(1903-1940,动态分布滞后模型,file:LH1) (发表在《学术论坛》,2003.1, p. 88-90) 1000 2000300040005000600005 10 15 20 25 30 35 40 销煤量 x1 图 1 开滦煤矿销煤量变化曲线(x 1, 1903-1940) 2 4681012141605 10 15 20 25 30 35 40 吨煤售价 X2 图2 开滦煤矿吨煤售价变化曲线(x 2, 1903-1940)
ECM误差修正模型
协整与误差修正模型 在处理时间序列数据时,我们还得考虑序列的平稳性。如果一个时间序列的均值或自协方差函数随时间而改变,那么该序列就是非平稳的。对于非平稳的数据,采用传统的估计方法,可能会导致错误的推断,即伪回归。若非平稳序列经过一阶差分变为平稳序列,那么该序列就为一阶单整序列。对一组非平稳但具有同阶的序列而言,若它们的线性组合为平稳序列,则称该组合序列具有协整关系。对具有协整关系的序列,我们算出误差修正项,并将误差修正项的滞后一期看做一个解释变量,连同其他反映短期波动关系的变量一起。建立误差修正模型。 建立误差修正模型的步骤如下:首先,对单个序列进行单根检验,进行单根检验有两种:ADF (Augument Dickey-Fuller )和DF(Dickey-Fuller)检验法。若序列都是同阶单整,我们就可以对其进行协整分析。在此我们只介绍单个方程的检验方法。对于多向量的检验参见Johensen 协整检验。我们可以先求出误差项,再建立误差修正模型,也可以先求出向量误差修正模型,然后算出误差修正项。补充一点的是,误差修正模型反映的是变量短期的相互关系,而误差修正项反映出变量长期的关系。下面我们给出案例分析。 案例分析 在此,我们考虑从1978年到2002年城镇居民的人均可支配收入income 与人均消费水平consume 的关系,数据来自于《中国统计年鉴》,如表8.1所示。根据相对收入假设理论,在一定时期,人们的当期的消费水平不仅与当期的可支配收入、而且受前期的消费水平的影响,具有一定的消费惯性,这就是消费的棘轮效应。从这个理论出发,我们可以建立如下(8.1)式的模型。同时根据生命周期假设理论,消费者的消费不仅与当期收入有关,同时也受过去各项的收入以及对将来预期收入的限制和影响。从我们下面的数据分析中,我们可以把相对收入假设理论与生命周期假设理论联系起来,推出如下的结果:当期的消费水平不仅与当期的可支配收入有关,而且还与前期的可支配收入、前两期的消费水平有关。在此先对人均可支配收入和人均消费水平取对数,同时给出如下的模型 t t t lincome lconsume lconsume 2110?+?+?=- t=1,2,…,n (8.1) 如果当期的人均消费水平与当期的人均可支配收入及前期的人均消费水平均为一阶单整序列,而它们的线性组合为平稳序列,那么我们可以求出误差修正序列,并建立误差修正模型,如下: t ecm lconsume lincome lconsume t t t t 4131210βββββ++?+?+=?-- t=1,2,…,n (8.2) t ecm = 12110--?-?-?-t t t lincome lconsume lconsume t=1,2,…,n (8.3) 从(8.2)式我们可以推出如下的方程: t lincome lincome lconsume lconsume lconsume t t t t t 4030123222131131)()()1(ββββββββββ+?-+?--+?--++=---(8.4) 在(8.2)中lconsume ?、 lincome ?分别为变量对数滞后一期的值,)1(-ecm 为误差修正项,如(8.3)式所示。(8.2)式为含有常数项和趋势项的形式,我们省略了只含趋
stata-误差修正模型讲解
误差修正模型: 如果用两个变量,人均消费y 和人均收入x (从格林的数据获得)来研究误差修正模型。 令z=(y x )’,则模型为: t t k i i t t z p z A z επ+?++=?-=-∑11 10 其中,'αβπ= 如果令1=k ,即滞后项为1,则模型为 t t t t z p z A z επ+?++=?--1110 实际上为两个方程的估计: t t t t t y t x p y p x b y b a y 1112111112111ε+?+?+++=?---- t t t t t x t x p y p x b y b a x 2122121122121ε+?+?+++=?---- 用ols 命令做出的结果: gen t=_n tsset t time variable: t, 1 to 204 gen ly=L.y (1 missing value generated) gen lx=L.x (1 missing value generated) reg D.y ly lx D.ly D.lx Source | SS df MS Number of obs = 202 -------------+------------------------------ F( 4, 197) = 21.07 Model | 37251.2525 4 9312.81313 Prob > F = 0.0000 Residual | 87073.3154 197 441.996525 R-squared = 0.2996 -------------+------------------------------ Adj R-squared = 0.2854 Total | 124324.568 201 618.530189 Root MSE = 21.024 ------------------------------------------------------------------------------ D.y | Coef. Std. Err. t P>|t| [95% Conf. Interval] -------------+---------------------------------------------------------------- ly | .0417242 .0187553 2.22 0.027 .0047371 .0787112 lx | -.0318574 .0171217 -1.86 0.064 -.0656228 .001908 ly | D1. | .1093189 .082368 1.33 0.186 -.0531173 .2717552 lx | D1. | .0792758 .0566966 1.40 0.164 -.0325344 .1910861 _cons | 2.533504 3.757158 0.67 0.501 -4.875909 9.942916 这是t t t t t y t x p y p x b y b a y 1112111112111ε+?+?+++=?----的回归结果,其中y a =2.5335,
谈谈系统误差的产生原因及其消除或减少的方法(精)
谈谈系统误差的产生原因及其消除或减少的方法 在讨论随机误差时,总是有意忽略系统误差,认为它等于零。若系统误差不存在,期望值就是真值。但是,在实际工作中系统误差是不能忽略的。所以要研究系统误差,发现和消除系统误差。 一、系统误差产生的原因 在长期的测量实践中人们发现,系统误差的产生一般的与测量仪器或装置本身的准确程度有关;与测量者本身的状况及测量时的外界条件有关。 1、在检定或测试中,标准仪器或设备的本身存在一定的误差。在进行计量检定,向下一级标准量值传递时,标准值的误差是固定不变的,属于系统误差。又称为工具误差或仪器误差。如:标称值为100g的砝码,经检定实际值为99.997g,即误差为 0.003g。用此砝码去秤量其他物体的质量,按标称值使用,则始终把被测量秤大,产生 0.003g的恒定系统误差。 某些仪器或设备,在测量前须先进行调零位,若因测量前未调零位或存在调零偏差,使得标准仪器在测量前即具有某一初始值,该初始值必然直接影响测量结果,给测量结果带来误差。这种误差,一般称零位误差,或简称零差。 某些仪器或设备,如未按要求放置,特别是某些电磁测量和无线电测量仪器或设备,未正确接地或屏蔽,或未用专用连接导线,也会给测量结果带来误差。这种误差称为装置误差。 2、测量时的客观环境条件(如温度、湿度、恒定磁场等),也会给测量结果带来误差。如,重力加速度因地点不同而异,若与重力加速度有关的某些测量,未按测量地点的不同加以适当的修正,也会给测量结果带来误差。因这种误差是由客观环境因素引起的,一般把它称为环境误差。 3、由于某些测量方法的不完善,特别是检定与测试中所使用的某些仪器或设备,在设计制造时受某些条件的限制(如元器件,制造工艺等),不得不降低某些指标,采用一些近似公式,这也会给测量结果带来误差。这种误差称方法误差或称理论误差。 4、在测量中,测量者本身生理上的某些缺陷,如听觉、视力等缺陷,也会给测量结果带来误差。此项误差又称为人员误差。 二、消除或减少系统误差的方法 mad消除或减少系统误差有两个基本方法。一是事先研究系统误差的性质和大小,以修正量的方式,从测量结果中予以修正;二是根据系统误差的性质,在测量时选择适当的测量方法,使系统误差相互抵消而不带入测量结果。 1.采用修正值方法 对于定值系统误差可以采取修正措施。一般采用加修正值的方法。 对于间接测量结果的修正,可以在每个直接测量结果上修正后,根据函数关系式计算出测量结果。修正值可以逐一求出,也可以根据拟合曲线求出。 应该指出的是,修正值本身也有误差。所以测量结果经修正后并不是真值,只是比未修正的测得值更接近真值。它仍是被测量的一个估计值,所以仍需对测量结果的不确定度作出估计。 2.从产生根源消除 用排除误差源的办法来消除系统误差是比较好的办法。这就要求测量者对所用标准装置,测量环境条件,测量方法等进行仔细分析、研究,尽可能找出产生系统误差的根源,进而采取措施。
误差修正模型案例
大型作业报告 课程名称计量经济学 课程代码142102601 题目误差修正模型 专业经济学 班级2010271 成员陈晓燕
上海电力学院经济与管理学院
计量经济学大型作业评分表 备注: 课程设计报告的质量70%,分4个等级: 1、按要求格式书写,计算正确,方案合理,内容完整,绘图规范整洁,符合任务书的要求35-40 2、按要求格式书写,计算较正确,有少量错误,方案较合理,内容完整,绘图较规范整洁,基本符合任务书的要求26-34 3、基本按要求格式书写,计算较正确,有部分错误,方案较合理,内容基本完整,绘图不规范整洁,基本符合任务书的要求15-25 4、基本按要求格式书写,计算错误较多,方案不合理,内容不完整,绘图不规范整洁,不符合任务书的要求0-14 工作态度30%,分4个等级: 1、很好,积极参与,答疑及出勤情况很好16-20 2、良好,比较能积极参与,答疑情况良好但有少量缺勤记录,或答疑情况
一般但出勤情况良好11-15 3、一般,积极性不是很高,基本没有答疑记录,出勤情况较差6-10 4、欠佳,不认真投入,且缺勤很多,也没有任何答疑记录0-5 实验报告 一、实验目的与要求 1、掌握时间序列的ADF平稳性检验; 2、掌握双变量的Engel-Granger检验; 3、掌握双变量的误差修正模型; 4、熟练使用Eviews软件建立误差修正模型。 二、实验内容 依据1978-2010年我国人均消费和人均GDP的数据,完成以下内容。 1、对实验数据进行单位根检验; 2、利用E-G两步法对实验数据进行协整检验; 3、根据实验数据的关系,建立误差修正模型,估计并进行解释。 三、实验步骤 (1)收集数据
误差分析与数据处理
误差理论与数据处理 一.绪论 当你能对世界进行测量的时候,就可以把世界变成数据来了解。 1.研究误差的意义 分析误差产生原因,从而消除误差; 正确处理所得数据,从而接近真值; 选择合理的方法,设计合理的系统。 2.误差的基本概念 误差=测量值—真值 约定真值:对于给定用途具有适当不确定度的、赋予特定量的值。 绝对误差=|测量值—真值| 相对误差=绝对误差/|真值|=绝对误差/|测量值| 修正值:与误差大小近似相等,但方向相反。修正值本身还有误差。 引用误差=示值误差/测量范围上限 3.误差来源 测量装置误差:标准量具的误差、一起误差、附件误差 环境误差:温度、湿度、气压、振动、照明、加速度、电磁场等。 方法误差 人员误差 4.误差分类 系统误差:在相同条件下,多次测量同一量值时,该误差的绝对值和符号保持不变,或者在条件改变时,按某一确定规律变化的误差。(均值和真值之差)系统误差分类:已定系统误差、未定系统误差、不变系统误差、变化系统误差(线性、周期性、复杂规律) 随机误差:大小、方向均随机不定,不可预见,不可修正。(抑制、统计分布规律) 粗大误差:明显超出统计规律预期值的误差。(异常因素或疏忽) 5.精度 准确度:系统误差的大小(偏移程度)
精密度:随机误差的大小(分散程度) 精确度:测量结果与被测量真值之间的一致程度 精确度(精度)在数值上一般多用相对误差来表示,但不用百分数。如某一测量结果的相对误差为0.001%,则其精度为10-5。 重复性:指在相同条件下在短时间内对同一个量进行多次测量所得测量结果之间的一致程度,一般用测量结果的分散性来定量表示。 复现性:指在变化条件下,对同一个量进行多次测量所得测量结果之间的一致程度,一般用测量结果的分散性来定量表示。 稳定性:测量仪器保持其计量特性随时间恒定的能力。 示值误差:指测量仪器的示值与对应输入量的真值之差。由于真值不能确定,故在实际应用中常采用约定真值。 偏移:指系统误差 最大允许误差:给定的测量仪器,规范、规程等所允许的误差极限值。有时也称为允许误差限。 不确定度:与测量结果相关联的、用于合理表征被测量值分散性大小的参数。 6.有效数字 最末一位数字是不可靠的,而倒数第二位数字是可靠的。在进行重要的测量时,测量结果和测量误差可再多取一位数字作为参考。 二.误差基本性质与处理 1.随机误差产生原因 测量装置、环境因素、人为因素。 随机误差整体具有统计学规律,多数随机误差服从正态分布。(单峰、对称、有界、均值趋于零) 2.算术平均值 由于实际上都是有限次测量,因此,我们只能把算术平均值近似地作为被测量的真值。 一般情况下,被测量的真值为未知,这时可用算术平均值代替被测量的真值进行计算。此时的随机误差称为残余误差,简称残差 残余误差代数和为零这一性质,可用来校核算术平均值及其残余误差计算的
系统误差和随机误差
系统误差和随机误差 测量误差包括系统误差和随机误差两类不同性质的误差 系统误差 是指“在重复性条件下,对同一被测量进行无限次测量所得结果的平均值与被测量真值之差”。它是在重复测量中保持恒定不变或可按预见方式变化的测量误差的分量。由于只能进行有限次数的重复测量,真值也只能是用约定真值代替,因此可能确定的系统误差也只是估计值。系统误差的来源可以是已知或未知的,那么怎样发现系统误差呢? 1、在规定的测量条件下多次测量同一个被测对量,从所得测量结果与计量标准所复现的量值之差可以发现并得到恒定的系统误差的估计值 2、在测量条件改变时,例如随时间、温度等街道条件改变时按某一确定的规律变化,可能是线性的或非线性地增长可减小,就可以发现测量结果中存在的可变的系统误差。通常消除或减小系统误差的方法有以下几种: (1)采用修正的方法:对系统误差的已知部分,用对测量结果进行修正的方法来减小系统误差。修正系统误差的方法包括在测量结果上加修正值;对测量结果乘修正因子;画修正曲线;以及制定修正值表等。例如:测量结果为20℃,用计量标准测量的结果是℃,则已知系统误差的估计值为℃,也就是说修正值是+℃,已修正测量结果等于未修正测量结果加修正值。即已修正测量结果为20℃+℃=℃。 (2)在实验过程中尽可能减少或消除一切产生系统误差的因素。例如在使用仪器时,应该对中的未能对中,应该调整到水平、垂直或平行理想状态的未能调好等等,都会带来系统误差,操作者要仔细调整,以便减小误差等。 (3)选择适当的测量方法,使系统误差抵消而不致带入测量结果中。例如:对恒定系统误差消除法,可采用异号法,即改变测量中的某些条件,例如测量方向、电压极性等,使两种