ZEMAX软件的优化函数构成以及优化函数算法的心得
各种光学自动软件最终都归结到优化函数结构和优化过程算法的问题。最近,本人在使用ZEMAX过程中,仔细分析了一下构成ZEMAX软件的优化函数构成以及优化过程算法,有些心得,留给入门的朋友们共享。一、 优化函数结构凡使用过SOD88软件(北京理工大学光电工程系开发)或者ZEMAX、CODEV的设计人员都知道,优化的参数包括以下几个种类:光学特性参数,例如焦距、入瞳距离、成像尺寸或者物高、物距,镜片间空气间距、镜片厚度等等;像质参数,例如畸变、场曲、彗差等等。ZEMAX将所有这些要求达到的目标都作为一个优化元附加一定的权重系数组成一个优化函数,并且通过改变结构参数使得这个优化函数趋向最小。数学表达式为:,其中 为各个优化元的权重系数, 为系统结构参数光学追迹出来的各个优化元,例如焦距、畸变、彗差等等, 为该优化元的目标值。优化过程有局部优化和全局优化两种。局部优化是指,通过改变系统结构参数的数值(半径、厚度、光学玻璃材料)计算出各个优化元的数值,然后构成整个优化函数的值的计算过程。该过程的思路是解决当前状态已经处于“U”型中的某个位置,迫使其落到“U”中间的最小位置。全局优化和局部优化不同的是,优化过程类似于一个搜索过程,这个搜索过程在结构参数限定的某个区域内进行优化,优化函数可能经历若干过波峰和波谷(多个极值之间)进行。由于采用的方法不同,构成了多种全局优化算法。全局优化能够避开某个局部极值寻找到更加优良的结构形式,使得光学设计距离完全自动化更进了一步。当然,目前的各种算法都还有一定局限性,例如搜索能力强度、计算复杂程度,由此影
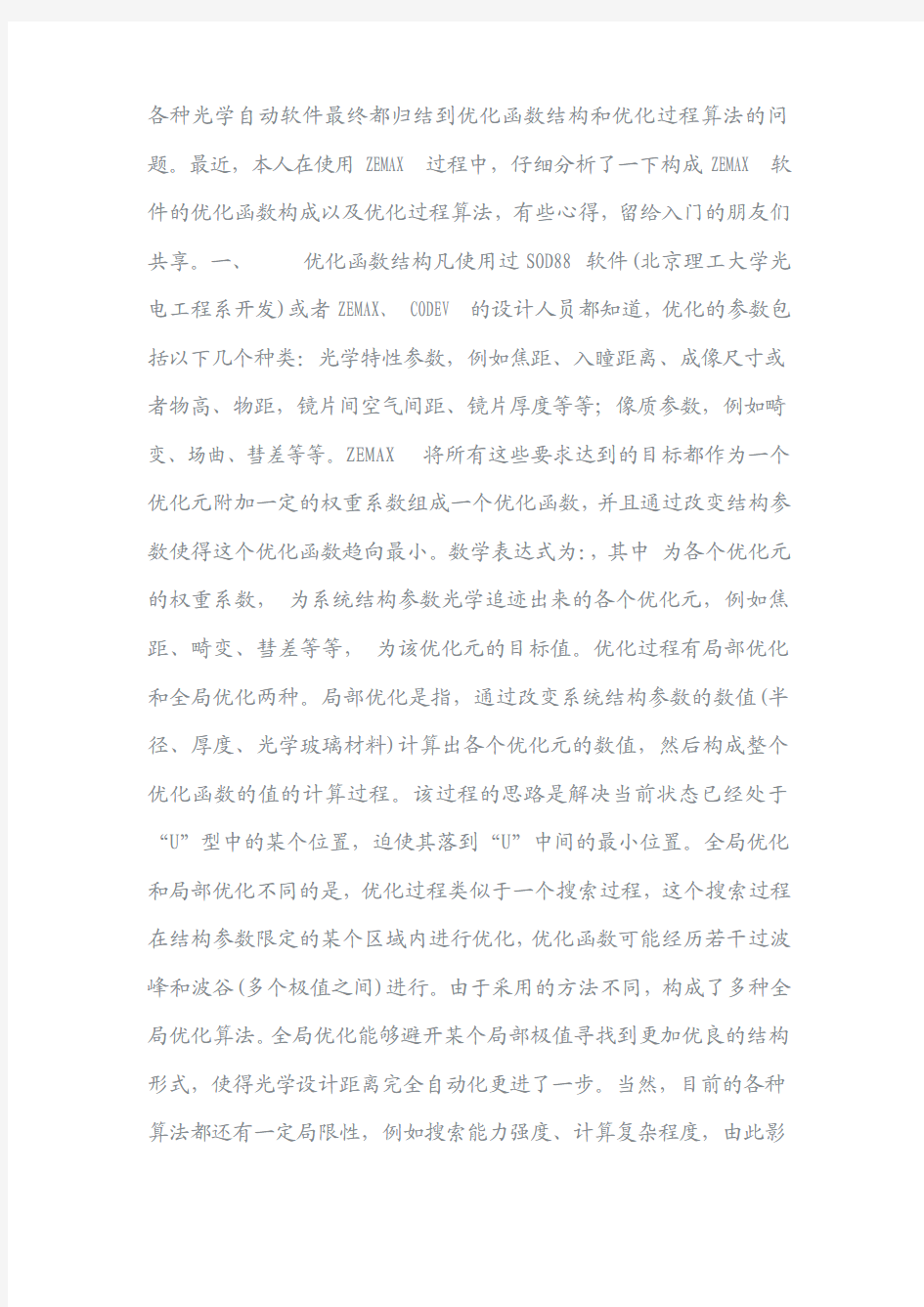
响计算速度、计算资源需求量以及误差累计造成的准确度等等问题。但是不管怎么样,现有的几种光学设计软件基于现有的高度发达计算机水平、光学设计发展水平和数学优化算法等,已经能够很好的满足具有一定光学设计经验知识的设计者们。二、 ZEMAX的缺省优化函数结构入门的光学设计者通常知道在进行结构优化时选用default 缺省的优化函数,然后加入少量的优化目标例如焦距来进行优化分析,但是对于这个缺省结构怎么构成的常常缺乏深入分析,这在一定程度上限制了我们进一步充分利用软件优化能力的水平发挥。实际上,缺省函数的构成结构并不复杂,它和ZEMAX提供给设计人员的“Default Merit Function(缺省优化函数)”紧密相关。如下图所示。第一行中的“Optimization Function and Reference (优化函数和参数方式)”。他的主要思想是:从某个视场代表物点发出若干条光线,在像面上有一个分布形式,按照各个象差的定义进行象差数值计算。第一个框中有“RMS(方均根)”和“PTV(峰谷差)”,第二个框中有差值计算的各种依据:WaveFront(波前)、Spot Radius(像点尺寸)、Spot X(X方向度量尺寸)、Spot Y(Y方向度量尺寸)、Spot X+Y(X和Y方向平均度量尺寸)。第三个框中有“Cetriod(重 心点)”、“Chief Ray(主光线)”、“Mean(平均值)”。举例说明各自配合的含义,缺省状况一般是:峰谷值+波前+质心点,优化的目标是:通过重心的光线到达像面时的相位和其他光线该相位状态时所在的位置有一个位置差别,将这些位置差别减小到最少,即认为各种像差都可能趋近于零。从定义而言,这个组合适合于象差不是很大的场合,对于小象差
系统其优化能力非常明显。对于较大象差系统,采用“RMS + Spot Radius + Chief Ray”效果更为明显,后者以到达像面上的各条光线与主光线的差别来进行度量。 当然,这两种方法对于畸变的校正能力是有限的,因此对于畸变要求较高的系统需要加入畸变这个优化目标元进行优化校正。那么,优化所使用的光线如何获得呢?其实这些光线的分布形式也是从缺省函数中定义的,如左图:软件提供了两种分布形式,一种是“高斯积分”形式:将轴对称的入瞳面分为数个环和扇面,每一个扇面中选择中心光线作为代表进行计算,每一个视场的所选用的光线数目都是两者的乘积;后一种模式是“矩阵模式”,它对于轴对称的入瞳按照正方形进行各种密度的抽样,一般而言,矩阵模式因为具有去渐晕的能力,在实际的设计中可能更为贴近实际效果。不过由于设计人员的习惯性,一般采用传统的按照孔径直径进行选择的前种方法。通常,光线的数量越多,抽样越密,计算得精确度越高,这主要取决于设计人员的实际系统和计算机资源。以上的设置就构成了每一个视场对应点的优化结构,这些光线的具体分布与视场大小或者物面尺寸、入瞳直径或者相对孔径有关。显然,每一条光线的优化目标都是和所选择的参考光线的差别为零,因此在优化函数列表中可以看到“target 值”都为零。这样构成的结构在优化函数列表中占据了空间的绝大部分。总数目 = 视场数目 * 光谱数目 * 每点抽样光线数目(例如Rings * Arms)。 除此之外,通常实际的设计过程中由于工程实践需要对镜片的厚度以及边缘厚度、空气间距进行设置,这也作为一个优化元进入了优化函数。这就是MNCG、MNEA、
MNEG、MXCG、MXCA等,他们限制了镜片和空气的厚度。在设计人员没有进行自定义设置前,都可以在表格的空格处看到:缺省函数以及优化方式的说明。三、 究竟哪些优化元需要自定义从上面的分析中已经知道,缺省的优化函数大体上解决了两个问题:第一个是光线的集中性,即通过各种优化模式使得物点发出的各条光线集中到像点上;第二个是工程问题,为了工程实现而限定镜片的厚度、空气厚度以及边缘厚度等,便于保证像质情况下留有固定镜片位置的余量。由此可见光学性能参数大部分是没有作为优化目标元的。例如:焦距、入瞳或出瞳距离、渐晕系数等等。对于像质的目标,由于缺省情况下度量的角度不一样,设计者对某种象差严格有要求的具体设计系统,仍然需要自行设置。因为缺省的光线评价计算出来的是一个总量,这个总量中各个像差的具体分布可能有很大的差别,例如场曲和彗差。另外,对于畸变有严格要求的系统也需要进行限制。当然,有一个问题就会出现,相互有关联的两个象差作为目标元自行设置之后,会出现一定的冲突,也就是说不一定优化效果很明显甚至于设计结构恶化。这种情况下,需要设计人员干预进行。常见的问题,例如目镜设计中对于彗差和畸变的校正,就容易出现反复的情况。解决这个问题,不能单靠软件功能,而需要经验和一定的理论基础。ZEMAX优化函数结构浅探许正光各种光学自动软件最终都归结到优化函数结构和优化过程算法的问题。最近,本人在使用ZEMAX过程中,仔细分析了一下构成ZEMAX软件的优化函数构成以及优化过程算法,有些心得,留给入门的朋友们共享。一、 优化函数结构凡使用过SOD88软件(北
京理工大学光电工程系开发)或者ZEMAX、CODEV的设计人员都知道,优化的参数包括以下几个种类:光学特性参数,例如焦距、入瞳距离、成像尺寸或者物高、物距,镜片间空气间距、镜片厚度等等;像质参数,例如畸变、场曲、彗差等等。ZEMAX将所有这些要求达到的目标都作为一个优化元附加一定的权重系数组成一个优化函数,并且通过改变结构参数使得这个优化函数趋向最小。数学表达式为:,其中 为各个优化元的权重系数, 为系统结构参数光学追迹出来的各个优化元,例如焦距、畸变、彗差等等, 为该优化元的目标值。优化过程有局部优化和全局优化两种。局部优化是指,通过改变系统结构参数的数值(半径、厚度、光学玻璃材料)计算出各个优化元的数值,然后构成整个优化函数的值的计算过程。该过程的思路是解决当前状态已经处于“U”型中的某个位置,迫使其落到“U”中间的最小位置。全局优化和局部优化不同的是,优化过程类似于一个搜索过程,这个搜索过程在结构参数限定的某个区域内进行优化,优化函数可能经历若干过波峰和波谷(多个极值之间)进行。由于采用的方法不同,构成了多种全局优化算法。全局优化能够避开某个局部极值寻找到更加优良的结构形式,使得光学设计距离完全自动化更进了一步。当然,目前的各种算法都还有一定局限性,例如搜索能力强度、计算复杂程度,由此影响计算速度、计算资源需求量以及误差累计造成的准确度等等问题。但是不管怎么样,现有的几种光学设计软件基于现有的高度发达计算机水平、光学设计发展水平和数学优化算法等,已经能够很好的满足具有一定光学设计经验知识的设计者们。二、 ZEMAX的缺省
优化函数结构入门的光学设计者通常知道在进行结构优化时选用default缺省的优化函数,然后加入少量的优化目标例如焦距来进行优化分析,但是对于这个缺省结构怎么构成的常常缺乏深入分析,这在一定程度上限制了我们进一步充分利用软件优化能力的水平发挥。实际上,缺省函数的构成结构并不复杂,它和ZEMAX提供给设计人员的“Default Merit Function(缺省优化函数)”紧密相关。如下图所示。第一行中的“Optimization Function and Reference (优化函数和参数方式)”。他的主要思想是:从某个视场代表物点发出若干条光线,在像面上有一个分布形式,按照各个象差的定义进行象差数值计算。第一个框中有“RMS(方均根)”和“PTV(峰谷差)”,第二个框中有差值计算的各种依据:WaveFront(波前)、Spot Radius(像点尺寸)、Spot X(X方向度量尺寸)、Spot Y(Y方向度量尺寸)、Spot X+Y(X 和Y方向平均度量尺寸)。第三个框中有“Cetriod(重 心点)”、“Chief Ray(主光线)”、“Mean(平均值)”。举例说明各自配合的含义,缺省状况一般是:峰谷值+波前+质心点,优化的目标是:通过重心的光线到达像面时的相位和其他光线该相位状态时所在的位置有一个位置差别,将这些位置差别减小到最少,即认为各种像差都可能趋近于零。从定义而言,这个组合适合于象差不是很大的场合,对于小象差系统其优化能力非常明显。对于较大象差系统,采用“RMS + Spot Radius + Chief Ray”效果更为明显,后者以到达像面上的各条光线与主光线的差别来进行度量。 当然,这两种方法对于畸变的校正能力是有限的,因此对于畸变要求较高的系统需要加入畸变这个优化目
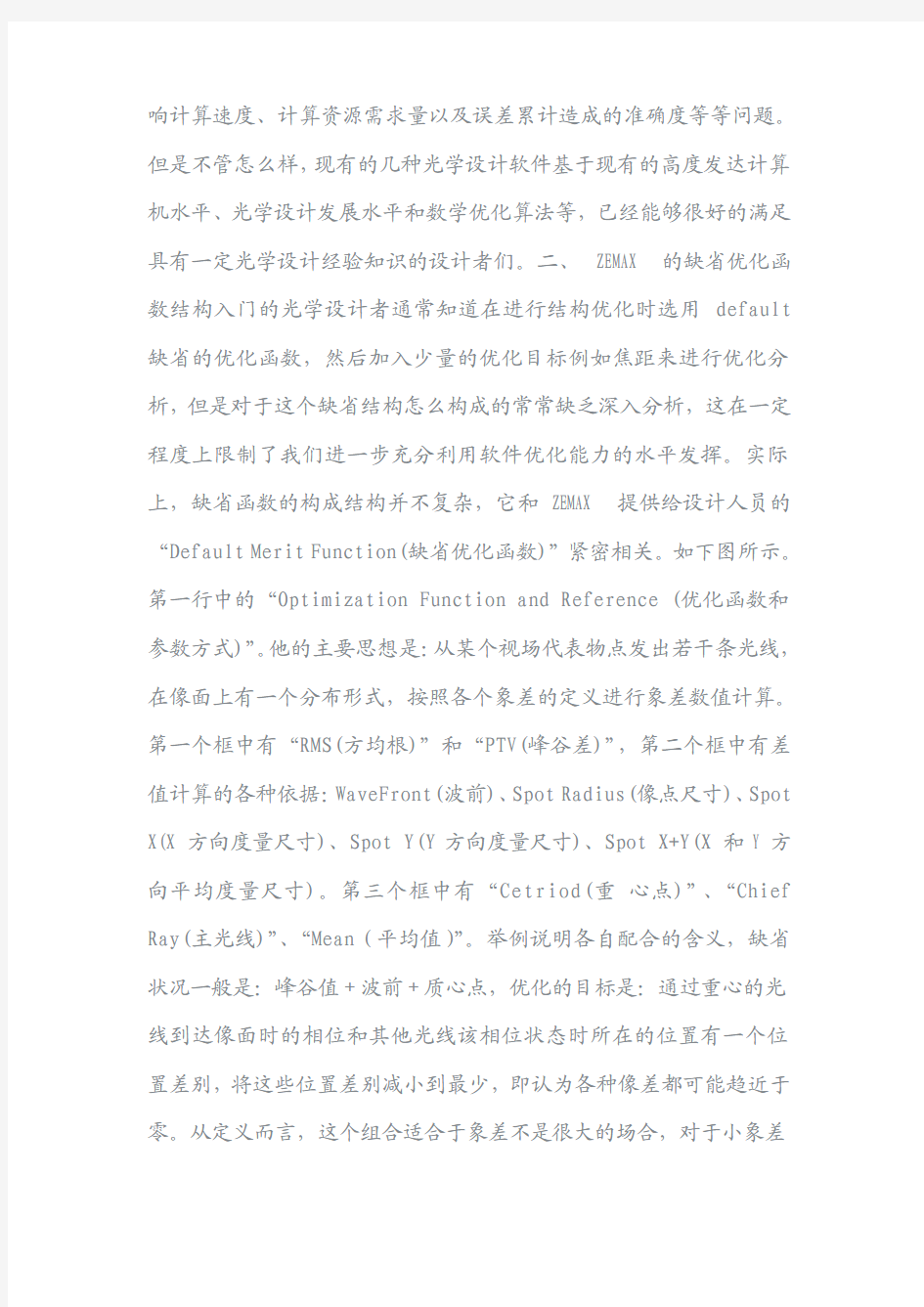
标元进行优化校正。那么,优化所使用的光线如何获得呢?其实这些光线的分布形式也是从缺省函数中定义的,如左图:软件提供了两种分布形式,一种是“高斯积分”形式:将轴对称的入瞳面分为数个环和扇面,每一个扇面中选择中心光线作为代表进行计算,每一个视场的所选用的光线数目都是两者的乘积;后一种模式是“矩阵模式”,它对于轴对称的入瞳按照正方形进行各种密度的抽样,一般而言,矩阵模式因为具有去渐晕的能力,在实际的设计中可能更为贴近实际效果。不过由于设计人员的习惯性,一般采用传统的按照孔径直径进行选择的前种方法。通常,光线的数量越多,抽样越密,计算得精确度越高,这主要取决于设计人员的实际系统和计算机资源。以上的设置就构成了每一个视场对应点的优化结构,这些光线的具体分布与视场大小或者物面尺寸、入瞳直径或者相对孔径有关。显然,每一条光线的优化目标都是和所选择的参考光线的差别为零,因此在优化函数列表中可以看到“target 值”都为零。这样构成的结构在优化函数列表中占据了空间的绝大部分。总数目 = 视场数目 * 光谱数目 * 每点抽样光线数目(例如Rings * Arms)。 除此之外,通常实际的设计过程中由于工程实践需要对镜片的厚度以及边缘厚度、空气间距进行设置,这也作为一个优化元进入了优化函数。这就是MNCG、MNEA、MNEG、MXCG、MXCA等,他们限制了镜片和空气的厚度。在设计人员没有进行自定义设置前,都可以在表格的空格处看到:缺省函数以及优化方式的说明。三、 究竟哪些优化元需要自定义从上面的分析中已经知道,缺省的优化函数大体上解决了两个问题:第一个是光线的
集中性,即通过各种优化模式使得物点发出的各条光线集中到像点上;第二个是工程问题,为了工程实现而限定镜片的厚度、空气厚度以及边缘厚度等,便于保证像质情况下留有固定镜片位置的余量。由此可见光学性能参数大部分是没有作为优化目标元的。例如:焦距、入瞳或出瞳距离、渐晕系数等等。对于像质的目标,由于缺省情况下度量的角度不一样,设计者对某种象差严格有要求的具体设计系统,仍然需要自行设置。因为缺省的光线评价计算出来的是一个总量,这个总量中各个像差的具体分布可能有很大的差别,例如场曲和彗差。另外,对于畸变有严格要求的系统也需要进行限制。当然,有一个问题就会出现,相互有关联的两个象差作为目标元自行设置之后,会出现一定的冲突,也就是说不一定优化效果很明显甚至于设计结构恶化。这种情况下,需要设计人员干预进行。常见的问题,例如目镜设计中对于彗差和畸变的校正,就容易出现反复的情况。解决这个问题,不能单靠软件功能,而需要经验和一定的理论基础。ZEMAX优化函数结构浅探许正光各种光学自动软件最终都归结到优化函数结构和优化过程算法的问题。最近,本人在使用ZEMAX过程中,仔细分析了一下构成ZEMAX软件的优化函数构成以及优化过程算法,有些心得,留给入门的朋友们共享。一、 优化函数结构凡使用过SOD88软件(北京理工大学光电工程系开发)或者ZEMAX、CODEV的设计人员都知道,优化的参数包括以下几个种类:光学特性参数,例如焦距、入瞳距离、成像尺寸或者物高、物距,镜片间空气间距、镜片厚度等等;像质参数,例如畸变、场曲、彗差等等。ZEMAX将所有这些要求达到的目标
都作为一个优化元附加一定的权重系数组成一个优化函数,并且通过改变结构参数使得这个优化函数趋向最小。数学表达式为:,其中 为各个优化元的权重系数, 为系统结构参数光学追迹出来的各个优化元,例如焦距、畸变、彗差等等, 为该优化元的目标值。优化过程有局部优化和全局优化两种。局部优化是指,通过改变系统结构参数的数值(半径、厚度、光学玻璃材料)计算出各个优化元的数值,然后构成整个优化函数的值的计算过程。该过程的思路是解决当前状态已经处于“U”型中的某个位置,迫使其落到“U”中间的最小位置。全局优化和局部优化不同的是,优化过程类似于一个搜索过程,这个搜索过程在结构参数限定的某个区域内进行优化,优化函数可能经历若干过波峰和波谷(多个极值之间)进行。由于采用的方法不同,构成了多种全局优化算法。全局优化能够避开某个局部极值寻找到更加优良的结构形式,使得光学设计距离完全自动化更进了一步。当然,目前的各种算法都还有一定局限性,例如搜索能力强度、计算复杂程度,由此影响计算速度、计算资源需求量以及误差累计造成的准确度等等问题。但是不管怎么样,现有的几种光学设计软件基于现有的高度发达计算机水平、光学设计发展水平和数学优化算法等,已经能够很好的满足具有一定光学设计经验知识的设计者们。二、 ZEMAX的缺省优化函数结构入门的光学设计者通常知道在进行结构优化时选用default缺省的优化函数,然后加入少量的优化目标例如焦距来进行优化分析,但是对于这个缺省结构怎么构成的常常缺乏深入分析,这在一定程度上限制了我们进一步充分利用软件优化能力的水平发挥。
实际上,缺省函数的构成结构并不复杂,它和ZEMAX提供给设计人员的“Default Merit Function(缺省优化函数)”紧密相关。如下图所示。第一行中的“Optimization Function and Reference (优化函数和参数方式)”。他的主要思想是:从某个视场代表物点发出若干条光线,在像面上有一个分布形式,按照各个象差的定义进行象差数值计算。第一个框中有“RMS(方均根)”和“PTV(峰谷差)”,第二个框中有差值计算的各种依据:WaveFront(波前)、Spot Radius(像点尺寸)、Spot X(X方向度量尺寸)、Spot Y(Y方向度量尺寸)、Spot X+Y(X 和Y方向平均度量尺寸)。第三个框中有“Cetriod(重 心点)”、“Chief Ray(主光线)”、“Mean(平均值)”。举例说明各自配合的含义,缺省状况一般是:峰谷值+波前+质心点,优化的目标是:通过重心的光线到达像面时的相位和其他光线该相位状态时所在的位置有一个位置差别,将这些位置差别减小到最少,即认为各种像差都可能趋近于零。从定义而言,这个组合适合于象差不是很大的场合,对于小象差系统其优化能力非常明显。对于较大象差系统,采用“RMS + Spot Radius + Chief Ray”效果更为明显,后者以到达像面上的各条光线与主光线的差别来进行度量。 当然,这两种方法对于畸变的校正能力是有限的,因此对于畸变要求较高的系统需要加入畸变这个优化目标元进行优化校正。那么,优化所使用的光线如何获得呢?其实这些光线的分布形式也是从缺省函数中定义的,如左图:软件提供了两种分布形式,一种是“高斯积分”形式:将轴对称的入瞳面分为数个环和扇面,每一个扇面中选择中心光线作为代表进行计算,每一个视场
的所选用的光线数目都是两者的乘积;后一种模式是“矩阵模式”,它对于轴对称的入瞳按照正方形进行各种密度的抽样,一般而言,矩阵模式因为具有去渐晕的能力,在实际的设计中可能更为贴近实际效果。不过由于设计人员的习惯性,一般采用传统的按照孔径直径进行选择的前种方法。通常,光线的数量越多,抽样越密,计算得精确度越高,这主要取决于设计人员的实际系统和计算机资源。以上的设置就构成了每一个视场对应点的优化结构,这些光线的具体分布与视场大小或者物面尺寸、入瞳直径或者相对孔径有关。显然,每一条光线的优化目标都是和所选择的参考光线的差别为零,因此在优化函数列表中可以看到“target 值”都为零。这样构成的结构在优化函数列表中占据了空间的绝大部分。总数目 = 视场数目 * 光谱数目 * 每点抽样光线数目(例如Rings * Arms)。 除此之外,通常实际的设计过程中由于工程实践需要对镜片的厚度以及边缘厚度、空气间距进行设置,这也作为一个优化元进入了优化函数。这就是MNCG、MNEA、MNEG、MXCG、MXCA等,他们限制了镜片和空气的厚度。在设计人员没有进行自定义设置前,都可以在表格的空格处看到:缺省函数以及优化方式的说明。三、 究竟哪些优化元需要自定义从上面的分析中已经知道,缺省的优化函数大体上解决了两个问题:第一个是光线的集中性,即通过各种优化模式使得物点发出的各条光线集中到像点上;第二个是工程问题,为了工程实现而限定镜片的厚度、空气厚度以及边缘厚度等,便于保证像质情况下留有固定镜片位置的余量。由此可见光学性能参数大部分是没有作为优化目标元的。例如:焦距、
入瞳或出瞳距离、渐晕系数等等。对于像质的目标,由于缺省情况下度量的角度不一样,设计者对某种象差严格有要求的具体设计系统,仍然需要自行设置。因为缺省的光线评价计算出来的是一个总量,这个总量中各个像差的具体分布可能有很大的差别,例如场曲和彗差。另外,对于畸变有严格要求的系统也需要进行限制。当然,有一个问题就会出现,相互有关联的两个象差作为目标元自行设置之后,会出现一定的冲突,也就是说不一定优化效果很明显甚至于设计结构恶化。这种情况下,需要设计人员干预进行。常见的问题,例如目镜设计中对于彗差和畸变的校正,就容易出现反复的情况。解决这个问题,不能单靠软件功能,而需要经验和一定的理论基础。
ZEMAX优化操作数
ZEMAX优化操作数 ZEMAX Merit Function,是在网上下下来的一个word文档,觉得蛮好的,一般用到的好像就是EFFL。呵呵,这个收集下,以后有用。 一阶光学性能 1. EFFL 透镜单元的有效焦距 2. AXCL 透镜单元的轴向色差 3. LACL 透镜单元的垂轴色差 4. PIMH 规定波长的近轴像高 5. PMAG 近轴放大率 6. AMAG 角放大率 7. ENPP 透镜单元入瞳位置 8. EXPP透镜单元出瞳位置 9. PETZ 透镜单元的PETZVAL半径 10. PETC反向透镜单元的PETZVAL半径 11. LINV 透镜单元的拉格朗日不变量 12. WFNO 像空间F/# 13. POWR 指定表面的权重 14. EPDI 透镜单元的入瞳直径
15. ISFN 像空间F/# (近轴) 16. OBSN 物空间数值孔径 17. EFLX “X”向有效焦距 18. EFLY “Y”向有效焦距 19. SFNO 弧矢有效F/# 像差 1. SPHA 在规定面出的波球差分布(0则计算全局) 2. COMA 透过面慧差(3阶近轴) 3. ASTI 透过面像散(3阶近轴) 4. FCUR透过面场曲(3阶近轴) 5. DIST透过面波畸变(3阶近轴) 6. DIMX 畸变最大值 7. AXCL 轴像色差(近轴) 8. LACL 垂轴色差 9. TRAR 径像像对于主光线的横向像差 10. TRAX “X”向横向色差 11. TRAY “Y”向横向色差
12. TRAI 规定面上的径像横向像差 13. TRAC径像像对于质心的横向像差 14. OPDC 主光线光程差 15. OPDX 衍射面心光程差 16. PETZ 透镜单元的PETZVAL半径 17. PETC反向透镜单元的PETZVAL半径 18. RSCH 主光线的RMS光斑尺寸 19. RSCE 类RSCH 20. RWCH主光线的RMS波前偏差 21. RWCE衍射面心的RMS波前偏差 22. ANAR像差测试 23. ZERN Zernike系数 24. RSRE 几何像点的RMS点尺寸(质心参考) 25. RSRH 类同RSRE(主光线参考) 26. RWRE类同RSRE(波前偏差) 27. TRAD “X”像TRAR比较 28. TRAE “Y”像TRAR比较 29. TRCX 像面子午像差”X”向(质心基准)
五种最优化方法
五种最优化方法 1.最优化方法概述 1.1最优化问题的分类 1)无约束和有约束条件; 2)确定性和随机性最优问题(变量是否确定); 3)线性优化与非线性优化(目标函数和约束条件是否线性); 4)静态规划和动态规划(解是否随时间变化)。 1.2最优化问题的一般形式(有约束条件): 式中f(X)称为目标函数(或求它的极小,或求它的极大),si(X)称为不等式约束,hj(X)称为等式约束。化过程就是优选X,使目标函数达到最优值。 2.牛顿法 2.1简介 1)解决的是无约束非线性规划问题; 2)是求解函数极值的一种方法; 3)是一种函数逼近法。 2.2原理和步骤
3.最速下降法(梯度法) 3.1最速下降法简介 1)解决的是无约束非线性规划问题; 2)是求解函数极值的一种方法; 3)沿函数在该点处目标函数下降最快的方向作为搜索方向; 3.2最速下降法算法原理和步骤
4.模式搜索法(步长加速法) 4.1简介 1)解决的是无约束非线性规划问题; 2)不需要求目标函数的导数,所以在解决不可导的函数或者求导异常麻烦的函数的优化问题时非常有效。 3)模式搜索法每一次迭代都是交替进行轴向移动和模式移动。轴向移动的目的是探测有利的下降方向,而模式移动的目的则是沿着有利方向加速移动。 4.2模式搜索法步骤
5.评价函数法 5.1简介 评价函数法是求解多目标优化问题中的一种主要方法。在许多实际问题中,衡量一个方案的好坏标准往往不止一个,多目标最优化的数学描述如下:min (f_1(x),f_2(x),...,f_k(x)) s.t. g(x)<=0 传统的多目标优化方法本质是将多目标优化中的各分目标函数,经处理或数学变换,转变成一个单目标函数,然后采用单目标优化技术求解。常用的方法有“线性加权和法”、“极大极小法”、“理想点法”。选取其中一种线性加权求合法介绍。 5.2线性加权求合法 6.遗传算法 智能优化方法是通过计算机学习和存贮大量的输入-输出模式映射关系,进
ZEMAX优化函数结构浅探
ZEMAX 优化函数结构浅探 公安部第一研究所 许正光 各种光学自动软件最终都归结到优化函数结构和优化过程算法的问题。最近,本人在使用ZEMAX 过程中,仔细分析了一下构成ZEMAX 软件的优化函数构成以及优化过程算法,有些心得,留给入门的朋友们共享。 一、 优化函数结构 凡使用过SOD88软件(北京理工大学光电工程系开发)或者ZEMAX 、CODEV 的设计人员都知道,优化的参数包括以下几个种类:光学特性参数,例如焦距、入瞳距离、成像尺寸或者物高、物距,镜片间空气间距、镜片厚度等等;像质参数,例如畸变、场曲、彗差等等。ZEMAX 将所有这些要求达到的目标都作为一个优化元附加一定的权重系数组成一个优化函数,并且通过改变结构参数使得这个优化函数趋向最小。 数学表达式为: ()21/20()i i F σαα=∑- ,其中i σ为各个优化元的权重系数,i α为系统结构参数光学追迹出来的各个优化元,例如焦距、畸变、彗差等等,0α为该优化元的目标值。 优化过程有局部优化和全局优化两种。局部优化是指,通过改变系统结构参数的数值(半径、厚度、光学玻璃材料)计算出各个优化元的数值,然后构成整个优化函数的值的计算过程。该过程的思路是解决当前状态已经处于“U ”型中的某个位置,迫使其落到“U ”中间的最小位置。 全局优化和局部优化不同的是,优化过程类似于一个搜索过程,这个搜索过程在结构参数限定的某个区域内进行优化,优化函数可能经历若干过波峰和波谷(多个极值之间)进行。由于采用的方法不同,构成了多种全局优化算法。全局优化能够避开某个局部极值寻找到更加优良的结构形式,使得光学设计距离完全自动化更进了一步。当然,目前的各种算法都还有一定局限性,例如搜索能力强度、计算复杂程度,由此影响计算速度、计算资源需求量以及误差累计造成的准确度等等问题。 但是不管怎么样,现有的几种光学设计软件基于现有的高度发达计算机水平、光学设计发展水平和数学优化算法等,已经能够很好的满足具有一定光学设计经验知识的设计者们。 二、 ZEMAX 的缺省优化函数结构 入门的光学设计者通常知道在进行结构优化时选用default 缺省的优化函数,然后加入少量的优化目标例如焦距来进行优化分析,但是对于这个缺省结构怎么构成的常常缺乏深入分析,这在一定程度上限制了我们进一步充分利用软件优化能力的水平发挥。 实际上,缺省函数的构成结构并不复杂,它和ZEMAX 提供给设计人员的“Default Merit Function(缺省优化函数)”紧密相关。如下图所示。 第一行中的“Optimization Function and Reference (优化函数和参数方式)”。他的主要思想是:从某个视场代表物点发出若干条光线,在像面上有一个分布形式,按照各个象差的定义进行象差数值计算。第一个框中有“RMS(方均根)”和“PTV(峰谷差)”,第二个框中有差值计算的各种依据:WaveFront(波前)、Spot Radius(像点尺寸)、Spot X(X 方向度量尺寸)、
(完整word版)基于ZEMAX的激光扩束镜的优化设计
光学软件设计 实验报告: 基于ZEMAX的激光扩束镜的优化设计 姓名: 学号:2011146211
一、实验目的 学会使用ZEMAX软件对多重结构配置的激光束扩大器进行优化设计。 二、实验要求 1、掌握使用多重结构配置。 2、进一步学习构建优化函数。 三、实验内容 设计一个激光扩束器,使用的波长为1.053um,输入光束直径为100mm,输出光束的直径为20mm,且输入光束和输出光束平行。要求只使用两片镜片,设计必须是伽利略式的(没有内部焦点),在镜片之间的间隔必须不超过250mm,只许使用1片非球面,系统必须在波长为0.6328um时测试。 1、打开ZEMAX软件,关闭默认的上一个设计结果,然后新建一个空白透镜。 2、在IMA面(像平面)前使用insert插入4个面,输入相关各面的厚度、曲率半径和玻璃类型值。 3、点击Gen设置入瞳直径为100,点击Wav设置波长为 1.053微米。
4、在主菜单Editors里构建一个优化函数,将第一行操作数类型改为REAY,surf输入5,Py输入1,taiget输入10,weight输入1。 5、在评价函数编辑窗中选工具—默认优化函数。选reset,将“开始在”的值设置为2,
确定。 6、点击Opt进行优化,优化后生产OPD图。
7、将第一面的conic设置为变量(control+z)。再次进行优化,重新生产OPD图并观察。 8、将三个曲率和圆锥西数的变量状态去掉。 9、点击Wav重新配置光波长,将之前的1.053改为0.6328,确定后再次更新OPD图并分析。
10、将第二面的厚度250mm设为可变,然后再次点击Opt优化,重新生成OPD图。此时去掉第二面的可变状态。 11、从主菜单—编辑中调出多重结构编辑窗,在这个窗口的编辑菜单中选“插入结构”来插入一个新的结构配置,双击第一行第一列,从下拉框中选wave,在同样的对话框里为wavelength选择1,确定。在config1下输入 1.053,在config2下输入0.6328。
zemax优化操作函数汇总
优化函数 1、像差 SPHA(球差):surf表面编号/wave波长/target设定目标值/weight权重 指定表面产生的球差贡献值,以波长表示。如果表面编号值为零,则为整个系统的总和 COMA(彗差) :surf表面编号/wave波长/target设定目标值/weight权重 指定表面产生的贡献值,以波长表示。如果表面编号值为0,则是针对整个系统。这是 由塞得和数计算得到的第三级彗差,对非近轴系统无效. ASTI(像散):指定表面产生像散的贡献值,以波长表示。如果表面编号值为0,则是针对整个系统。这是由塞得和数计算得到的第三级色散,对非近轴系统无效 FCUR(场曲):指定表面产生的场曲贡献值,以波长表示。如果表面编号值为0,则是计算整个系统的场曲。这是由塞得系数计算出的第三级场曲,对非近轴系统无效. DIST(畸变):指定表面产生的畸变贡献值,以波长表示。如果表面编号值为0,则使用整个系统。同样,如果表面编号值为0,则畸变以百分数形式给出。这是由塞得系数计算出的第三级畸变,对与非近轴系统无效. DIMX(最大畸变值):它与DIST 相似,只不过它仅规定了畸变的绝对值的上限。视场的整数编号可以是0,这说明使用最大的视场坐标,也可以是任何有效的视场编号。注意,最大的畸变不一定总是在最大视场处产生。得到的值总是以百分数为单位,以系统作为一个整体。这个操作数对于非旋转对称系统可能无效。 AXCL(轴向色差):以镜头长度单位为单位的轴向色差。这是两种定义的最边缘的波长的理想焦面的间隔。这个距离是沿着Z 轴测量的。对非近轴系统无效. LACL(垂轴色差):这是定义的两种极端波长的主光线截点的y方向的距离。对于非近轴系统无效TRAR(垂轴像差):在像面半径方向测定的相对于主光线的垂轴像差. TRAX(x方向垂轴像差):在像面x方向测定的相对于主光线的垂轴像差 TRAY(Y方向垂轴像差):在像面Y方向测定的相对于主光线的垂轴像差 TRAI(垂轴像差):在指定表面半口径方向测定的相对于主光线的垂轴像差.类似于TRAR,只不过是针对一个表面,而不是指定的像面. OPDC(光程差):指定波长的主光线的光程差. PETZ(匹兹伐曲率半径):以镜头长度单位表示,对非近轴系统无效 PETC(匹兹伐曲率):以镜头长度单位的倒数表示,对非近轴系统无效 RSCH:相对于主光线的RMS 斑点尺寸(光线像差)。 RSCE:环带波长Hx,Hy,以镜头长度单位测量的,相对于几何像质心的RMS 斑点尺寸(光线像差)。这个操作数类似于RSCH,只不过参考点是像质心,而不是主光线。详细内容可参见RSCH。!R0Y}N ~Q
zemax手把手教程
ZEMAX手把手教程 课程1:单透镜(a singlet) 你将要学到的:开始ZEMAX,输入波长和镜片数据,生成 光线特性曲线(ray fan),光程差曲线(OPD),和点列图(Spot diagram),确定厚度求解方法和变量,进行简单的优化。 假设你需要设计一个F/4的镜片,焦距为100mm,在轴上可见光谱范围内,用BK7玻璃,你该怎样开始呢? 首先,运行ZEMAX。ZEMAX主屏幕会显示镜片数据编辑(LDE)。你可以对LDE窗口进行移动或重新调整尺寸,以适合你自己的喜好。LDE由多行和多列组成,类似于电子表格。半径、厚度、玻璃和半口径等列是使用得最多的,其他的则只在某些特定类型的光学系统中才会用到。 L DE中的一小格会以“反白”方式高亮显示,即它会以与其他格子不同的背景颜色将字母显示在屏幕上。如果没有一个格子是高亮的,则在任何一格上用鼠标点击,使之高亮。这个反白条在本教程中指的就是光标。你可以用鼠标在格子上点击来操纵LDE,使光标移动到你想要停留的地方,或者你也可以只使用光标键。LDE的操作是简单的,只要稍加练习,你就可以掌握。 开始,我们先为我们的系统输入波长。这不一定要先完成,我们只不过现在选中了这一步。在主屏幕菜单条上,选择“系统(System)”菜单下的“波长(Wavelengths)”。 屏幕中间会弹出一个“波长数据(Wavelength Data)”对话框。ZEMAX中有许多这样的对话框,用来输入数据和提供你选择。用鼠标在第二和第三行的“使用(Use)”上单击一下,将会增加两个波长使总数成为三。现在,在第一个“波长”行中输入486,这是氢(Hydrogen)F谱线的波长,单位为微米。 Z EMAX全部使用微米作为波长的单位。现在,在第二行的波长列中输入587,最后在第三行输入656。这就是ZEMAX中所有有关输入数据的操作,转到适当的区域,然后键入数据。在屏幕的最右边,你可以看到一列主波长指示器。这个指示器指出了主要的波长,当前为486微米。在主波长指示器的第二行上单击,指示器下移到587的位置。主波长用来计算近轴参数,如焦距,放大率等等。 ZEMAX一般使用微米作为波长的单位 “权重(Weight)”这一列用在优化上,以及计算波长权重数据如RMS点尺寸和STREHL 率。现在让所有的权为1.0,单击OK保存所做的改变,然后退出波长数据对话框。 现在我们需要为镜片定义一个孔径。这可以使ZEMAX在处理其他的事情上,知道每一个镜片该被定为多大。由于我们需要一个F/4镜头,我们需要一个25mm的孔径(100mm的焦距除F/4)。设置这个孔径值,选择“系统”中的“通常(General)”菜单项,出现“通常数据(General Data)”对话框,单击“孔径值(Aper Value)”一格,输入一个值:25。注意孔径类型缺省时为“入瞳直径(Entrance Pupil Diameter)”,也可选择其他类型的孔径设置。除此之外,还要加入一些重要的表面数据。ZEMAX模型光学系统使用一系列的表面,每一个面有一个曲率半径,厚度(到下一个面的轴上距离),和玻璃。一些表面也可有其他的数据,我们以后将会讨论到。注意在LDE中显示的有三个面。物平面,在左边以OBJ表示;光阑面,以STO表示;还有像平面,以IMA表示。对于我们的单透镜来说,我们共需要四个面:物平面,前镜面(同时也是光阑面),后镜面,和像平面。要插入第四个面,只需移动光标到像平面(最后一个面)的“无穷
zemax实例
课程1:单透镜(a singlet) 开始ZEMAX,输入波长和镜片数据,生成光线 特性曲线(ray fan),光程差曲线(OPD),和点列图 (Spot diagram),确定厚度求方法和变量,进行简 单的优化。 假设需要设计一个F/4的镜片,焦距为100mm,在轴上可见光谱范围内,用BK7玻璃,该怎样开始呢? 首先,运行ZEMAX。ZEMAX主屏幕会显示镜片数据编辑(LDE)。你可以对LDE(你工作的场所)窗口进行移动或重新调整尺寸,以适合你自己的喜好。LDE由多行和多列组成,类似于电子表格。半径、厚度、玻璃和半口径等列是使用得最多的,其他的则只在某些特定类型的光学系统中才会用到。 1、基本设置:开始,我们先为我们的系统输入波长。这不一定要先完成,我们只不过现在选中了这一步。在主屏幕菜单条上,选择“系统(System)”---“通用配置(general)”----“单位units”,先确定单位。再选择“系统(System)”菜单下的“波长(Wavelengths)”。屏幕中间会弹出一个“波长数据(Wavelength Data)”对话框。ZEMAX中有许多这样的对话框,用来输入数据和提供你选择。用鼠标在第二和第三行的“使用(Use)”上单击一下,
将会增加两个波长使总数成为三。现在,在第一个“波长”行中输入0.486,这是氢(Hydrogen)F谱线的波长,单位为微米。 Z EMAX全部使用微米作为波长的单位。现在,在第二行的波长列中输入0.587,最后在第三行输入0.656。这就是ZEMAX中所有有关输入数据的操作,转到适当的区域,然后键入数据。在屏幕的最右边,你可以看到一列主波长指示器。这个指示器指出了主要的波长,当前为0.486微米。在主波长指示器的第二行上单击,指示器下移到587的位置。主波长用来计算近轴参数,如焦距,放大率等等。“权重(Weight)”这一列用在优化上,以及计算波长权重数据如RMS点尺寸和STREHL率。现在让所有的权为1.0,单击OK保存所做的改变,然后退出波长数据对话框。 选择“系统(System)”---“视场(fields)”----“角度”将X、Y都设为零。表示光线平行于主光轴入射。 2、为镜片定义一个孔径。这可以使ZEMAX在处理其他的事情上,知道每一个镜片该被定为多大。由于我们需要一个F/4镜头,我们需要一个25mm的孔径(100mm的焦距除F/4)。设置这个孔径值,选择“系统”---“通用配置(General)”---“aperture(孔径)”输入“光圈数值”:25。注意孔径类型缺省时为“入瞳直径(Entrance Pupil Diameter)”,也可选择其他类型的孔径设置。 3、加入一些重要的表面数据。ZEMAX模型光学系统使用一系列的表面,每一个面有一个曲率半径,厚度(到下一个面的轴上距离),和玻璃。一些表面也可有其他的数据,我们以后将会讨论到。
蚁群算法的基本原理
2.1 蚁群算法的基本原理 蚁群优化算法是模拟蚂蚁觅食的原理,设计出的一种群集智能算法。蚂蚁在觅食过程中能够在其经过的路径上留下一种称之为信息素的物质,并在觅食过程中能够感知这种物质的强度,并指导自己行动方向,它们总是朝着该物质强度高的方向移动,因此大量蚂蚁组成的集体觅食就表现为一种对信息素的正反馈现象。某一条路径越短,路径上经过的蚂蚁越多,其信息素遗留的也就越多,信息素的浓度也就越高,蚂蚁选择这条路径的几率也就越高,由此构成的正反馈过程,从而逐渐的逼近最优路径,找到最优路径。 蚂蚁在觅食过程时,是以信息素作为媒介而间接进行信息交流,当蚂蚁从食物源走到蚁穴,或者从蚁穴走到食物源时,都会在经过的路径上释放信息素,从而形成了一条含有信息素的路径,蚂蚁可以感觉出路径上信息素浓度的大小,并且以较高的概率选择信息素浓度较高的路径。 (a) 蚁穴 1 2 食物源 A B (b) 人工蚂蚁的搜索主要包括三种智能行为: (1)蚂蚁的记忆行为。一只蚂蚁搜索过的路径在下次搜索时就不再被该蚂蚁选择,因此在蚁群算法中建立禁忌表进行模拟。 (2)蚂蚁利用信息素进行相互通信。蚂蚁在所选择的路径上会释放一种信息素的物质,当其他蚂蚁进行路径选择时,会根据路径上的信息素浓度进行选择,这样信息素就成为蚂蚁之间进行通信的媒介。 (3)蚂蚁的集群活动。通过一只蚂蚁的运动很难达到事物源,但整个蚁群进行搜索就完全不同。当某些路径上通过的蚂蚁越来越多时,路径上留下的信息素数量也就越多,导致信息素强度增大,蚂蚁选择该路径的概率随之增加,从而进一步增加该路径的信息素强度,而通过的蚂蚁比较少的路径上的信息素会随着时间的推移而挥发,从而变得越来越少。3.3.1蚂蚁系统 蚂蚁系统是最早的蚁群算法。其搜索过程大致如下: 在初始时刻,m 只蚂蚁随机放置于城市中, 各条路径上的信息素初始值相等,设为:0(0)ij ττ=为信息素初始值,可设0m m L τ=,m L 是由最近邻启发式方法构 造的路径长度。其次,蚂蚁(1,2,)k k m = ,按照随机比例规则选择下一步要转
利用蚁群算法优化前向神经网络
利用蚁群算法优化前向神经网络 来源:深圳发票 https://www.360docs.net/doc/2c6352875.html,/ 内容摘要:蚁群算法(ant colony algorithm,简称ACA)是一种最新提出的新型的寻优策略,本文尝试将蚁群算法用于三层前向神经网络的训练过程,建立了相应的优化模型,进行了实际的编程计算,并与加动量项的BP算法、演化算法以及模拟退火算法进行比较,结果表明该方法具有更好的全局收敛性,以及对初值的不敏感性等特点。关键词:期货经纪公司综合实力主成分分析聚类分析 人工神经网络(ANN)是大脑及其活动的一个理论化的数学模型,由大量的处理单元(神经元)互连而成的,是神经元联结形式的数学抽象,是一个大规模的非线性自适应模型。人工神经网络具有高速的运算能力,很强的自学习能力、自适应能力和非线性映射能力以及良好的容错性,因而它在模式识别、图像处理、信号及信息处理、系统优化和智能控制等许多领域得到了广泛的应用。 人工神经网络的学习算法可以分为:局部搜索算法,包括误差反传(BP)算法、牛顿法和共轭梯度法等;线性化算法;随机优化算法,包括遗传算法(GA)、演化算法(EA)、模拟退火算法(SA)等。 蚁群算法是一种基于模拟蚂蚁群行为的随机搜索优化算法。虽然单个蚂蚁的能力非常有限,但多个蚂蚁构成的群体具有找到蚁穴与食物之间最短路径的能力,这种能力是靠其在所经过的路径上留下的一种挥发性分泌物(pheromone)来实现的。蚂蚁个体间通过这种信息的交流寻求通向食物的最短路径。已有相关计算实例表明该算法具有良好的收敛速度,且在得到的最优解更接近理论的最优解。
本文尝试将蚁群算法引入到前向神经网络的优化训练中来,建立了基于该算法的前向神经网络训练模型,编制了基于C++语言的优化计算程序,并针对多个实例与多个算法进行了比较分析。 前向神经网络模型 前向人工神经网络具有数层相连的处理单元,连接可从一层中的每个神经元到下一层的所有神经元,且网络中不存在反馈环,是常用的一种人工神经网络模型。在本文中只考虑三层前向网络,且输出层为线性层,隐层神经元的非线性作用函数(激活函数)为双曲线正切函数: 其中输入层神经元把输入网络的数据不做任何处理直接作为该神经元的输出。设输入层神经元的输出为(x1,x2,Λ,xn),隐层神经元的输入为(s1,s2,Λ,sh),隐层神经元的输出为 (z1,z2,Λ,zh),输出层神经元的输出为(y1,y2,Λ,ym),则网络的输入-输出为: 其中{w ij}为输入层-隐层的连接权值,{w i0}隐层神经元的阈值,{v ki}为隐层-输出层的连接权值,{v k0}为输出层神经元的阈值。网络的输入-输出映射也可简写为: 1≤k≤m (5)
用Zemax进行优化设计
目录 摘要 (1) ABSTRACT (2) 引言 (3) 1 光学传递函数和点列图 (4) 1.1光学传递函数 (4) 1.1.1利用MTF曲线来评价成像质量 (4) 1.1.2利用MTF曲线的积分值来评价成像质量 (5) 1.2点列图 (5) 2 像差综述 (6) 2.1轴上点球差 (6) 2.1.1球差的定义和表示方法 (6) 2.1.2球差的校正 (8) 2.2像散与像面弯曲(场曲) (8) 2.2.1像散 (8) 2.2.2场曲 (9) 2.3正弦差和彗差 (9) 2.3.1正弦差和彗差的定义 (9) 2.3.2彗差的校正 (12) 2.4畸变 (12) 2.5色差 (13) 2.5.1位置色差 (13) 2.5.2倍率色差 (14) 2.6波相差 (15) 3 表面类型 (16) 3.1简介 (16) 3.2内含表面 (16) 3.3非球面镜片 (19) 3.3.1简介 (19) 3.3.2非球面镜片光学原理 (20) 4 用ZEMAX进行优化设计 (20) 4.1由抛物反射镜产生的初级球面像差: (20) 4.2求由抛物面反射镜和两单透镜组成的初始光学系统 (21) 4.3计算抛物面反射镜和两单透镜组成的初始光学系统 (23) 5 结论 (27) 致谢 (28) 参考文献................................................................................................................... 错误!未定义书签。
摘要 本文研究了用Zemax设计非球面补偿系统的优化。非球面抛物面反射镜在许多光学系统中被采用, 但加工检验较难。在Zemax中优化控制设计零位补偿系统。设计既方便, 加工又容易, 是一种较好的方法。文中介绍了七种像差的定义和表示方法以及对于像差的校正方法;波像差的定义、形成原因及其与像差的关系;由于涉及到面型,本文还介绍了Zemax中包含的面型以及重要面型的简介。最后,利用Zemax进行一个实例的优化设计,得到了优化后的数据。 关键字:像差,波像差,表面类型
智能优化算法(蚁群算法和粒子群算法)
7.1 蚁群优化算法概述 ?7.1.1 起源 ?7.1.2 应用领域 ?7.1.3 研究背景 ?7.1.4 研究现状 ?7.1.5 应用现状
7.1.1 蚁群优化算法起源 20世纪50年代中期创立了仿生学,人们从生物进化的机理中受到启发。提出了许多用以解决复杂优化问题的新方法,如进化规划、进化策略、遗传算法等,这些算法成功地解决了一些实际问题。
20世纪90年代意大利学者M.Dorigo,V.Maniezzo,A.Colorni等从生物进化的机制中受到启发,通过模拟自然界蚂蚁搜索路径的行为,提出来一种新型的模拟进化算法——蚁群算法,是群智能理论研究领域的一种主要算法。
背景:人工生命 ?“人工生命”是来研究具有某些生命基本特征的人工系统。人工生命包括两方面的内容。 ?研究如何利用计算技术研究生物现象。?研究如何利用生物技术研究计算问题。
?现在关注的是第二部分的内容,现在已经有很多源于生物现象的计算技巧。例如,人工神经网络是简化的大脑模型,遗传算法是模拟基因进化过程的。 ?现在我们讨论另一种生物系统-社会系统。更确切的是,在由简单个体组成的群落与环境以及个体之间的互动行为,也可称做“群智能”(swarm intelligence)。这些模拟系统利用局部信息从而可能产生不可预测的群体行为(如鱼群和鸟群的运动规律),主要用于计算机视觉和计算机辅助设计。
?在计算智能(computational intelligence)领域有两种基于群智能的算法。蚁群算法(ant colony optimization)和粒子群算法(particle swarm optimization)。前者是对蚂蚁群落食物采集过程的模拟,已经成功运用在很多离散优化问题上。
ZEMAX优化操作数的中文含义
ZEMAX 优化操作数的中文含义 在很多次的成像及激光系统培训中,都有学员非常希望能够有一份ZEMAX中文的优化操作数说明。这样的确会对学习ZEMAX软件及控制光学系统有很好的帮助。 例如我们常用的EFFL控制焦距,PMAG控制近轴放大率,SPHA控制初级球差等。 尽管随着软件的不断升级,会有不断新增的操作数,但是下面的内容为您提供了一份比较全面的参考资料。 这里有比较完整的操作数ZEMAX优化操作数 一阶光学性能 1. EFFL 透镜单元的有效焦距 2. AXCL 透镜单元的轴向色差 3. LACL 透镜单元的垂轴色差 4. PIMH 规定波长的近轴像高 5. PMAG 近轴放大率 6. AMAG 角放大率 7. ENPP 透镜单元入瞳位置 8. EXPP透镜单元出瞳位置 9. PETZ 透镜单元的PETZV AL半径 10. PETC反向透镜单元的PETZV AL半径 11. LINV 透镜单元的拉格朗日不变量 12. WFNO 像空间F/# 13. POWR 指定表面的权重 14. EPDI 透镜单元的入瞳直径 15. ISFN 像空间F/# (近轴) 16. OBSN 物空间数值孔径 17. EFLX “X”向有效焦距 18. EFL Y “Y”向有效焦距 19. SFNO 弧矢有效F/# 像差 1. SPHA 在规定面出的波球差分布(0则计算全局) 2. COMA 透过面慧差(3阶近轴) 3. ASTI 透过面像散(3阶近轴) 4. FCUR透过面场曲(3阶近轴) 5. DIST透过面波畸变(3阶近轴) 6. DIMX 畸变最大值 7. AXCL 轴像色差(近轴) 8. LACL 垂轴色差 9. TRAR 径像像对于主光线的横向像差 10. TRAX “X”向横向色差
蚁群算法路径优化算法
其中,表示在t时刻蚂蚁k由元素(城市)i转移到元素(城市)j的状态转移概率。allowedk = C ? tabuk表示蚂蚁k下一步允许选择的城市。α为启发式因子,表示轨迹的相对重要性,反映了蚂蚁在运动过程中所积累的信息在蚂蚁运动时所起的作用,其值越大,则该蚂蚁越倾向于选择其他蚂蚁经过的路径,蚂蚁之间的协作性越强。β为期望启发式因子,表示能见度的相对重要性,反映了蚂蚁在运动过程中启发信息在蚂蚁选择路径中的受重视程度,其值越 大,则该状态转移概率越接近于贪心规则;ηij(t) 为启发函数,表达式为。式中,dij表示相邻两个城市之间的距离。(6)修改禁忌表指针,即选择好之后将蚂蚁移动到新的元素(城市),并把该元素(城市)移动到该蚂蚁个体的禁忌表中。(7)若集合C中元素(城市)未遍历完,即k for i=1:NC % 计算各城市间的距离 for j=1:NC distance(i,j)=sqrt((CooCity(i,2)-CooCity(j,2))^2+(CooCity(i,3)-CooCity(j,3))^2); end end MAXIT=10;%最大循环次数 Citystart=[]; % 起点城市编号 tau=ones(NC,NC); % 初始时刻各边上的信息痕迹为1 rho=0.5; % 挥发系数 alpha=1; % 残留信息相对重要度 beta=5; % 预见值的相对重要度 Q=10; % 蚁环常数 NumAnt=20; % 蚂蚁数量 routelength=inf; % 用来记录当前找到的最优路径长度 for n=1:MAXIT for k=1:NumAnt %考查第K只蚂蚁 deltatau=zeros(NC,NC); % 第K只蚂蚁移动前各边上的信息增量为零 %[routek,lengthk]=path(distance,tau,alpha,beta,[]); % 不靠率起始点[routek,lengthk]=path(distance,tau,alpha,beta,Citystart); % 指定起始点if lengthk 摘要 自意大利学者M. Dorigo于1991年提出蚁群算法后,该算法引起了学者们的极大关注,在短短十多年的时间里,已在组合优化、网络路由、函数优化、数据挖掘、机器人路径规划等领域获得了广泛应用,并取得了较好的效果。本文首先讨论了该算法的基本原理,接着介绍了旅行商问题,然后对蚁群算法及其二种改进算法进行了分析,并通过计算机仿真来说明蚁群算法基本原理,然后分析了聚类算法原理和蚁群聚类算法的数学模型,通过调整传统的蚁群算法构建了求解聚类问题的蚁群聚类算法。最后,本文还研究了一种依赖信息素解决聚类问题的蚁群聚类算法,并把此蚁群聚类算法应用到对人工数据进行分类,还利用该算法对2005年中国24所高校综合实力进行分类,得到的分类结果与实际情况相符,说明了蚁群算法在聚类分析中能够收到较为理想的结果。 【关键词】蚁群算法;计算机仿真;聚类;蚁群聚类 Study on Ant Colony Algorithm and its Application in Clustering Abstract: As the ant colony algorithm was proposed by M. Dorigo in 1991,it bringed a extremely large attention of scholars, in past short more than ten years, optimized, the network route, the function in the combination optimizes, domains and so on data mining, robot way plan has obtained the widespread application, and has obtained the good effect.This acticle discussed the basic principle of it at first, then introduced the TSP,this acticle also analysed the ant colony algorithm and its improved algorithm, and explanated it by the computer simulates, then it analysed the clustering algorithm and the ant clustering algorithm, builded the ant clustering algorith to solution the clustering by the traditioned ant algorithm. At last, this article also proposed the ant clustering algorith to soluted the clustering dependent on pheromon. Carry on the classification to the artificial data using this ant clustering algorithm; Use this algorithm to carry on the classification of the synthesize strength of the 2005 Chinese 24 universities; we can obtain the classified result which matches to the actual situation case. In the next work, we also should do the different cluster algorithm respective good and bad points as well as the classified performance aspect the comparison research; distinguish the different performance of different algorithm in the analysis when the dates are different. Key words: Ant colony algorithm; Computer simulation; clustering; Ant clustering 目录 蚁群优化算法 课程设计安排 本课程设计着眼于应用光学的基本理论知识、光学设计基本理论和方法,侧重于典型系统具体设计的思路和过程,加强学生对光学设计的切身领会和理解,将理论与实际融合、统一,以提高学生综合分析及解决问题能力的培养。 结合< ZEMAX入门教学 例子 1 单透镜(Singlet) (3) 例子 2 座标变换(Coordinate Breaks)................................18例子 3 牛顿式望远镜(Newtonian Telescope). (26) 例子4消色差单透镜(Achromatic Singlet) (40) 例子5变焦透镜(Zoom Lens) (47) 1-1单透镜 这个例子是学习如何在ZEMAX里键入资料,包括设罝系统孔径(System Aperture)、透镜单位(Lens Units)、以及波长范围(Wavelength Range),并且进行优化。你也将使用到光线扇形图(Ray Fan Plots)、弥散斑(Spot Diagrams)以及其它的分析工具来评估系统性能。 这例子是一个焦距100 mm、F/4的单透镜镜头,材料为BK7,并且使用轴上(On-Axis)的可见光进行分析。首先在运行系统中开启ZEMAX,默认的编辑视窗为透镜资料编辑器(Lens Data Editor, LDE),在LDE可键入大多数的透镜参数,这些设罝的参数包括:表面类型(Surf:Type)如标准球面、非球面、衍射光栅…等 曲率半径(Radius of Curvature) 表面厚度(Thickness):与下一个表面之间的距离 材料类型(Glass)如玻璃、空气、塑胶…等:与下一个表面之间的材料 表面半高(Semi-Diameter):决定透镜表面的尺寸大小 上面几项是较常使用的参数,而在LDE后面的参数将搭配特殊的表面类型有不同的参数涵义。 1-2设罝系统孔径 首先设罝系统孔径以及透镜单位,这两者的设罝皆在按钮列中的「GEN」按钮里(System->General)。点击「GEN」或透过菜单的System->General来开启General的对话框。S 点击孔径标签(Aperture Tab)(默认即为孔径页)。因为我们要建立一个焦距100 mm、基本蚁群优化算法及其改进毕业设计
蚁群优化算法
目录 [隐藏]
? ?
比较
1 2
蚁群算法的提出: 人工蚂蚁与真实蚂蚁的异同
o o ? ? ? ? ?
3 4 5 6 7
2.1 2.2
相同点比较 不同点比较
蚁群算法的流程图 基本蚁群算法的实现步骤 蚁群算法的 matlab 源程序 蚁群算法仿真结果 版权声明
[编辑]蚁群算法的提出:
人类认识事物的能力来源于与自然界的相互作用,自然界一直是人类创造力 的源泉。 自然界有许多自适应的优化现象不断地给人以启示,生物和自然中的生 态系 统可以利用自身的演化来让许多在人类看来高度复杂的优化问题得到几乎完美 的解决。近些年来,一些与经典的数学问题思想不同的,试图通过模拟自然生态 系统 来求解复杂优化问题的仿生学算法相继出现,如蚁群算法、遗传算法、粒子群算 法等。 这些算法大大丰富了现在优化技术,也为那些传统最优化技术难以处理的 组 合优化问题提供了切实可行的解决方案。 生物学家通过对蚂蚁的长期的观察发现,每只蚂蚁的智能并不高,看起来没 有集中的指挥,但它们却能协同工作,集中事物,建起坚固漂亮的蚁穴并抚养后 代, 依靠群体能力发挥出超出个体的智能。 蚁群算法是最新发展的一种模拟昆虫王国 中蚂蚁群体智能行为的仿生优化算法,它具有较强的鲁棒性、优良的分布式计算 机 制、易于与其他方法相结合等优点。尽管蚁群算法的严格理论基础尚未奠定,国 内外的相关研究还处于实验阶段, 但是目前人们对蚁群算法的研究已经由当初单 一 的旅行商问题(TSP)领域渗透到了多个应用领域,由解决一维静态优化问题发展 到解决多维动态组合优化问题, 由离散域范围内的研究逐渐扩展到了连续域范围 内的ZEMAX入门教学