机械原理-速度瞬心习题
习题 > 答案
一.概念
1.当两构件组成转动副时,其相对速度瞬心在转动副的圆心处;组成移动副时,其瞬心在垂直于移动导路的无穷远处;组成滑动兼滚动的高副时,其瞬心在接触点两轮廓线的公法线上.
2.相对瞬心与绝对瞬心相同点是都是两构件上相对速度为零,绝对速度相等的点 ,而不同点是相对瞬心的绝对速度不为零,而绝对瞬心的绝对速度为零 .
3.速度影像的相似原理只能用于同一构件上的两点,而不能用于机构不同构件上的各点.
4.速度瞬心可以定义为互相作平面相对运动的两构件上,相对速度为零,绝对速度相等的点.
5.3个彼此作平面平行运动的构件共有 3 个速度瞬心,这几个瞬心必位于同一条直线上 .含有6个构件的平面机构,其速度瞬心共有 15 个,其中 5 个是绝对瞬心,有 9 个相对瞬心.
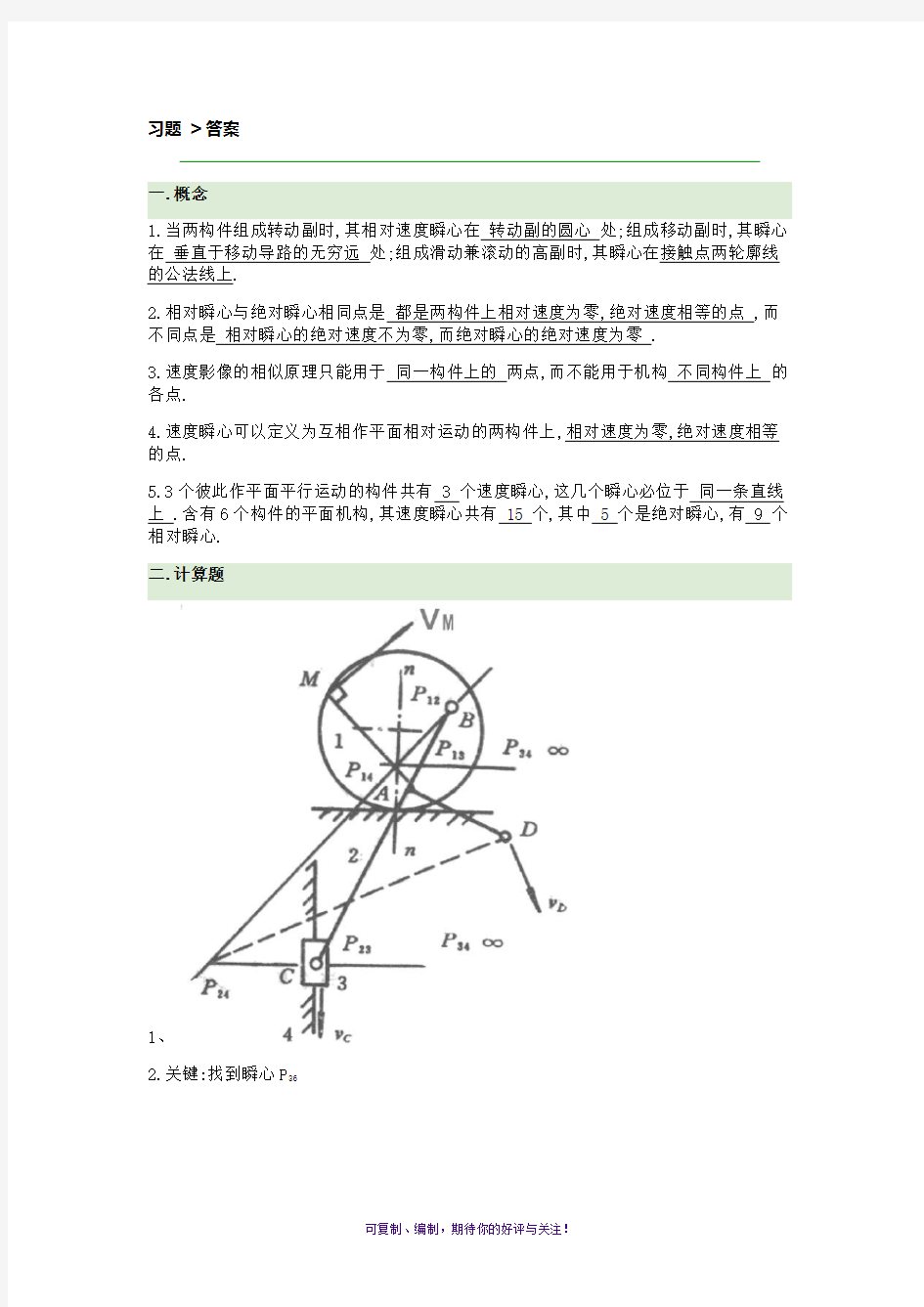
二.计算题
1、
2.关键:找到瞬心P36
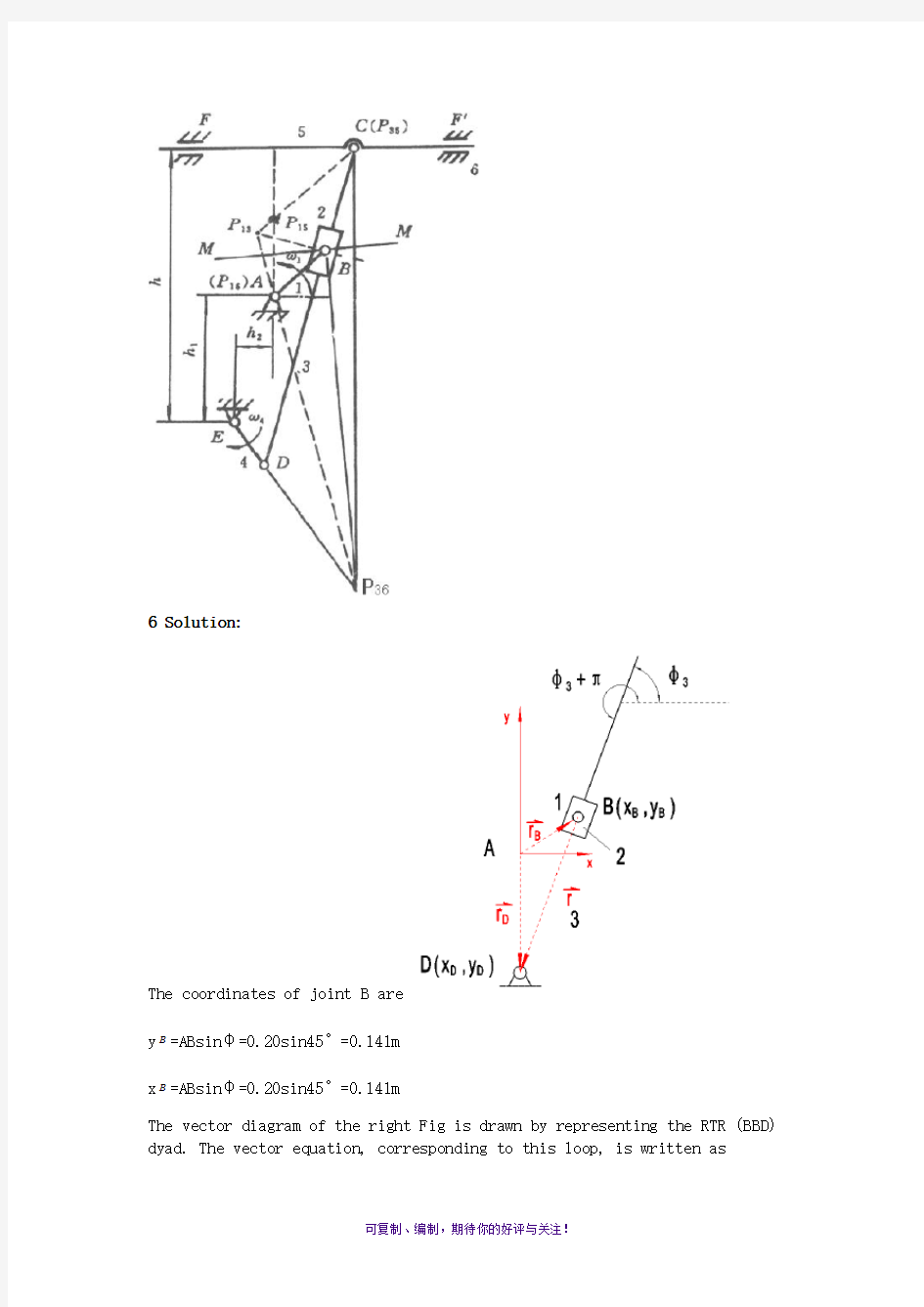
6 Solution:
The coordinates of joint B are
y B=ABsinφ=0.20sin45°=0.141m
x B=ABsinφ=0.20sin45°=0.141m
The vector diagram of the right Fig is drawn by representing the RTR (BBD) dyad. The vector equation, corresponding to this loop, is written as
r B + r -r D =0 or r =r D -r B
Where r =BD and r =γ.
When the above vectorial equation is projected on the x and y axes, two scalar equations are obtained:
r*cos(φ3+π)=x D -x B =-0.141m
r*sin(φ3+π)=y D -y B =-0.541m
Angle φ3 is obtained by solving the system of the two previous scalar equations:
tgφ3=141.0541
.0 ?φ3=75.36°
The distance r is
r=)cos(3π?+-B D x x =0.56m
The coordinates of joint C are
x C =CDcosφ3=0.17m y C =CDsinφ3-AD=0.27m
For the next dyad RRT (CEE), the right Fig, one can write
Cecos(π- φ4)=x E - x C Cesin(π- φ4)= y E - y C
Vector diagram represent the RRT (CEE) dyad.
When the system of equations is solved, the unknowns φ4 and x E are obtained:
φ4=165.9° x E =-0.114m
7. Solution: The origin of the system is at A, A≡0; that is,
x A =y A =0.
The coordinates of the R joints at B are
x B =l 1cosφ y B = l 1sinφ For the dyad DBB (RTR), the following equations can be written with respect to the sliding line CD:
mx B - y B +n=0 y D =mx D +n
With x D =d 1
, y D =0 from the above system, slope m of link CD and intercept n can be calculated: m=111cos sin d l l -?? n=??cos sin 1111l d l d -
The coordinates x C and y C of the center of the R joint C result from the system of two equations:
y C =mx C +n=????cos sin cos sin 111
1111l d l d x d l l C -+-,
(x C- x D)2+(y C- y D)2=l 2 3
Because of the quadratic equation, two solutions are abstained for x C and y C.For continuous motion of the mechanism, there are constraint relations for the Choice of the correct solution; that is x C< x B< x D and y C>0
For the last dyad CEE (RRT), a position function can be written for joint E:
(x C-x E)2+(y C-h)2=l 2 4
The equation produces values for x1E and x2E, and the solution x E >x C is selected for continuous motion of the mechanism.
(注:文档可能无法思考全面,请浏览后下载,供参考。)
机械原理--速度瞬心习题讲解学习
机械原理--速度瞬心 习题
习题 > 答案 一.概念 1.当两构件组成转动副时,其相对速度瞬心在转动副的圆心处;组成移动副时,其瞬心在垂直于移动导路的无穷远处;组成滑动兼滚动的高副时,其瞬心在接触点两轮廓线的公法线上. 2.相对瞬心与绝对瞬心相同点是都是两构件上相对速度为零,绝对速度相等的点 ,而不同点是相对瞬心的绝对速度不为零,而绝对瞬心的绝对速度为零 . 3.速度影像的相似原理只能用于同一构件上的两点,而不能用于机构不同构件上的各点. 4.速度瞬心可以定义为互相作平面相对运动的两构件上,相对速度为零,绝对速度相等的点. 5.3个彼此作平面平行运动的构件共有 3 个速度瞬心,这几个瞬心必位于同一条直线上 .含有6个构件的平面机构,其速度瞬心共有 15 个,其中 5 个是绝对瞬心,有 9 个相对瞬心. 二.计算题 1、 2.关键:找到瞬心P36
6 Solution: The coordinates of joint B are y B=ABsinφ=0.20sin45°=0.141m x B=ABsinφ=0.20sin45°=0.141m The vector diagram of the right Fig is drawn by representing the RTR (BBD) dyad. The vector equation, corresponding to this loop, is written as r B+ r-r D=0 or r=D-B r= and r=γ. Where
When the above vectorial equation is projected on the x and y axes, two scalar equations are obtained: r*cos(φ3+π)=x D -x B =-0.141m r*sin(φ3+π)=y D -y B =-0.541m Angle φ3 is obtained by solving the system of the two previous scalar equations: tgφ3=141.0541 .0 ?φ3=75.36° The distance r is r=)cos(3π?+-B D x x =0.56m The coordinates of joint C are x C =CDcosφ3=0.17m y C =CDsinφ3-AD=0.27m For the next dyad RRT (CEE), the right Fig, one can write Cecos(π- φ4)=x E - x C Cesin(π- φ4)= y E - y C Vector diagram represent the RRT (CEE) dyad. When the system of equations is solved, the unknowns φ4 and x E are obtained: φ4=165.9° x E =-0.114m 7. Solution: The origin of the system is at A, A≡0; that is,
机械原理-速度瞬心习题
习题 > 答案 一.概念 1.当两构件组成转动副时,其相对速度瞬心在转动副的圆心处;组成移动副时,其瞬心在垂直于移动导路的无穷远处;组成滑动兼滚动的高副时,其瞬心在接触点两轮廓线的公法线上. 2.相对瞬心与绝对瞬心相同点是都是两构件上相对速度为零,绝对速度相等的点 ,而不同点是相对瞬心的绝对速度不为零,而绝对瞬心的绝对速度为零 . 3.速度影像的相似原理只能用于同一构件上的两点,而不能用于机构不同构件上的各点. 4.速度瞬心可以定义为互相作平面相对运动的两构件上,相对速度为零,绝对速度相等的点. 5.3个彼此作平面平行运动的构件共有 3 个速度瞬心,这几个瞬心必位于同一条直线上 .含有6个构件的平面机构,其速度瞬心共有 15 个,其中 5 个是绝对瞬心,有 9 个相对瞬心. 二.计算题 1、 2.关键:找到瞬心P36
6 Solution: The coordinates of joint B are y B=ABsinφ=0.20sin45°=0.141m x B=ABsinφ=0.20sin45°=0.141m The vector diagram of the right Fig is drawn by representing the RTR (BBD) dyad. The vector equation, corresponding to this loop, is written as
r B + r -r D =0 or r =r D -r B Where r =BD and r =γ. When the above vectorial equation is projected on the x and y axes, two scalar equations are obtained: r*cos(φ3+π)=x D -x B =-0.141m r*sin(φ3+π)=y D -y B =-0.541m Angle φ3 is obtained by solving the system of the two previous scalar equations: tgφ3=141.0541 .0 ?φ3=75.36° The distance r is r=)cos(3π?+-B D x x =0.56m The coordinates of joint C are x C =CDcosφ3=0.17m y C =CDsinφ3-AD=0.27m For the next dyad RRT (CEE), the right Fig, one can write Cecos(π- φ4)=x E - x C Cesin(π- φ4)= y E - y C
2011机械原理自由度+瞬心法+凸轮考题2套
第一套题: 1.计算图示机构的自由度。如有复合铰链、虚约束、局部自由度,请在图中标出。 答案:
2. 在图示导杆机构中,已知AB杆长,AC杆长,BD长度以及ω1。试用瞬心法求:(1)图示位置时θ=45°,该机构的全部瞬心的位置; (2)当θ=45°时,D点的速度v D; (3)构件2上BD延长线上最小速度的位置及大小。 (本题用图解法求解,直接在图上标明位置,速度列出计算式,不求具体值)
答案: (1)共有6个瞬心,如图所示; (2)vD=ω1·DF (3)最小速度点位置为E点,如图所示vE=ω1·EF
3. 图示为一偏置式滚子推杆盘状凸轮机构,凸轮为一偏心圆,逆时针回转,其直径D=32mm,滚子半径为r=5mm,偏距e=6mm,试根据图示位置 1)画出凸轮的理论廓线、偏距圆; 2)求出基圆半径rb、最大行程h、升程角δ0; 3)画出图示位置时凸轮的压力角。 答案:
第二套题目: 1. 计算下图机构自由度(若机构中存在复合铰链、局部自由度或虚约束,请明确指出)。 解: 6,8,1L h n P P === (2′) 机构自由度:323628111L h F n P P =--=?-?-?= (1′) 或:计算图示机构自由度,若机构中存在复合铰链、局部自由度或虚约束,请明确指出。 111128323=-?-?=--=h L P P n F
2. 图示机构运动简图中,设已知各构件的尺寸及原动件1的速度v1和加速度a1,现要求:(1)确定图示位置时该机构全部瞬心的位置; (2)用瞬心法求构件2及构件3的瞬时角速度ω2、ω3(列出计算式,不求具体值);(3)求构件2上瞬时速度为零的点的位置(在图上标出)。 答案:
机械原理自由度 瞬心法 凸轮考题
1.计算图示机构的自由度。如有复合铰链、虚约束、局部自由度,请在图中标出。 2.在图示导杆机构中,已知AB杆长,AC杆长,BD长度以及ω1。试用瞬心法求: (1)图示位置时θ=45°,该机构的全部瞬心的位置; (2)当θ=45°时,D点的速度v D; (3)构件2上BD延长线上最小速度的位置及大小。 (本题用图解法求解,直接在图上标明位置,速度列出计算式,不求具体值)
3.图示为一偏置式滚子推杆盘状凸轮机构,凸轮为一偏心圆,逆时针回转,其直径D=32mm,滚子半径为r=5mm,偏距e=6mm,试根据图示位置 1)画出凸轮的理论廓线、偏距圆; 2)求出基圆半径rb、最大行程h、升程角δ0; 3)画出图示位置时凸轮的压力角。 答案:1. 2.(1)共有6个瞬心,如图所示; (2)vD=ω1·DF (3)最小速度点位置为E点,如图所示 vE=ω1·EF
3. 1.计算下图机构自由度(若机构中存在复合铰链、局部自由度或虚约束,请明确指出)。 2.图示机构运动简图中,设已知各构件的尺寸及原动件1的速度v1和加速度a1,现要求:(1)确定图示位置时该机构全部瞬心的位置; (2)用瞬心法求构件2及构件3的瞬时角速度ω2、ω3(列出计算式,不求具体值);(3)求构件2上瞬时速度为零的点的位置(在图上标出)。 G A B E F C D
3.图示为一偏心圆凸轮机构,O 为偏心圆的转动中心,C 为几何中心。 (1)画出凸轮的理论廓线并求出凸轮的基圆半径r b ; (2)用作图法求从动件2的最大升程h 和推程运动角δ1; (3)在图中标出凸轮从图示位置转过90 时从动件的位移s 与机构的压力角α。 答案:1. 6,8,1L h n P P ===(2′) 机构自由度:323628111L h F n P P =--=?-?-?=(1′)
机械原理 速度瞬心习题
习题> 答案 1. 当两构件组成转动副时,其相对速度瞬心在转动副的圆心处;组成移动副时,其瞬心在垂直于移动导路的无穷远处;组成滑动兼滚动的高副时,其瞬心在接触点两轮廓线的公法线上. 2. 相对瞬心与绝对瞬心相同点是都是两构件上相对速度为零,绝对速度相等的点,而不同点是相对瞬心的绝对速度不为零,而绝对瞬心的绝对速度为零? 3. 速度影像的相似原理只能用于同一构件上的两点,而不能用于机构不同构件上的各 占 八、、? 4. 速度瞬心可以定义为互相作平面相对运动的两构件上,相对速度为零,绝对速度相等的点. 5.3个彼此作平面平行运动的构件共有_3_个速度瞬心,这几个瞬心必位于同一条直线上.含有6个构件的平面机构,其速度瞬心共有_15_个,其中_5_个是绝对瞬心,有_9_个相对瞬心. 二.计算题
The coord inates of joint B are y B =ABsin 0 =0.20sin45 ° =0.141m x B =ABsin 0 =0.20sin45 ° =0.141m The vector diagram of the right Fig is drawn by representing the RTR (BBD) dyad. 2.关键:找到瞬心 P 36 6 Solutio n:
The vector equati on, corresp onding to this loop, is writte n as Where r = BD and r = 丫 . Whe n the above vectorial equati on is projected on the x and y axes, two scalar equati ons are obta in ed: B r*cos( $+ n )=x D -x =-0.141m r*sin( 3>+ n )=y D -y B =-0.541m Angle 3 is obtained by solving the system of the two previous scalar equations: 0.541 tg 员=°?1410 3=75.36 ° The dista nee r is X D X B A?% The coord inates of joint C are x C =CDcos 0 3 =0.17m y C =CDsin 03 -AD=0.27m For the next dyad RRT (CEE), the right Fig, one can write Cecos( n 0 4)=x E - x C Cesin( -n0 4 )= y E - y r B + r - r D =0 or r = r D - r B r= CO s(「3 二)=0.56m
机械原理 第3章
机械原理——平面机构的运动分析第3章平面机构的运动分析3-1 机构运动分析的目的和方法3-2 速度瞬心法求机 构速度3-3 矢量方程图解法求速度、加速度3-4 综合法进行速度分析3-5 解析法求运动分析基本要求: 理解速度瞬心 的概念、数目和位置的确定方法熟练掌握速度瞬心法在机构速度分析中的应用熟练掌握矢量方程图解法进行运动分析 掌握用解析法对机构进行运动分析机械原理——平面机构 的运动分析任务、方法一、机构运动分析的任务已知:原动件的运动规律和机构运动尺寸确定:⑴各构件的位置、角位移、角速度、角加速度;⑵构件上某些点的轨迹、位移、速度、加速度二、机构运动分析的方法图解法: 速度瞬心法、矢量方程图解法解析法:矢量法、复数法矩阵法、基本杆组法机械原理——平面机构的运动分析3-2 速度瞬心法求机构速度一、速度瞬心的概念二、机构的瞬心数目三、瞬心位置的确定四、用速度瞬心进行机构的速度分析机械原理——平面机构的运动分析一、速度瞬心Instant Center 《理论力学》:当任一刚体相对于另一刚体作平面运动时,在任一瞬时,都可2 以认为它们是绕某一点作相对转动,该点称为瞬时相对回转中心。υA2A1AA1瞬时相对回转中心的位置 P12 2B 2B 1υ B2B1既然P12是瞬时相对回转中心则该瞬时两构件在P12的相对速度为零,或者说绝对速度相等所以P12为两构件该瞬时的等速重合点P12 速度瞬心:两
构件瞬时等速重合点相对速度为零,绝对速度相等 1 瞬心:相对瞬心、绝对瞬心瞬心:机械原理——平面机构的运动分析三、瞬心位置的确定1 由瞬心定义确定通过运动副直接相联的构件——显瞬心n P12 ∞ P12 P12 C P23 纯滚2 滚 +动滑P12 B 3 P12 1 P12机械原理——平面机构的运动分析瞬心位置的确定2 借助三心定理确定不通过运动副直接相联的构件——隐含的瞬心三心定理:三个相互作平面运动的构件有三个瞬心,且在一条直线上。υC1C3 υC2C3 1 C 2 3 P13 P23机械原理——平面机构的运动分析例2 求图示机构的所有瞬心2v3 ω1 31P24 4P34→∞ P34→∞ P13 P12 2v3 ω1 31P14 4P23机械原理——平面机构的运动分析2 平面连杆机构P23 2 3 P12 1 3 1 P14 4 P34 P13 P13 C ω1 P13P14μL ω3 P13P34 μL 2 B 3 P13 1 ω1 P13 P14 AP D ω 3 ω1 逆时针14 4 P34 P13 P34 vP13 机械原理——平面机构的运动分析例3 已知:铰链四杆机构各杆的长度。分析:求:机构的传动比iω2/ω4 显瞬心:p12 p23 p34 p14解:1. 取μl 作机构运动简图隐含的瞬心:p13 p24 2. 求瞬心数目:N44-1/26 3. 求瞬心p24 p13要点:取含2、4构件的三构件组两次确定p24 p34 1-2-4构件组、2-3-4构件组3p23同理得p13 4v p 24 p12 p 24 ω2 vp243.求ω2 /ω4 2ω4 ω2v p 24 p14 p 24 ω4 p14 ω 2 p14 p 24 p24 p12 1i ω 4 p12 p 24机械原理——平面机构的运动分析例3 已知:铰链四杆机构
机械原理模拟试卷(三)
机械原理模拟试卷(三) 一、填空题(每题2分,共20分) 1. 两个作平面运动的构件,相对瞬心的绝对速度。 ( ①均为零②不相等③不为零且相等) 2. 机械自锁的条件是。 ( ①效率大于零②效率大于1 ③效率小于或等于零) 3. 对于滚子从动件盘形凸轮机构,若两个凸轮具有相同的理论轮廓线,只因滚子半径不等而导致实际廓线不相同,则两机构从动件的运动规律。 ( ①不相同②相同③不一定相同) 4. 差动轮系是指自由度。 ( ①为1的周转轮系②为2的定轴轮系③为2的周转轮系) 5. 曲柄滑块机构若存在死点时,其主动件必须是,在此位置与共线。 ( ①曲柄②连杆③滑块) 6. 对于动不平衡的回转构件,平衡重需加在与回转轴垂直的回转平面上。 ( ①一个②两个③三个④三个以上) 7. 两构件组成平面转动副时,则运动副使构件间丧失了的独立运动。 ( ①二个移动②二个转动③一个移动和一个转动) 8. 若忽略摩擦,一对渐开线齿轮啮合时,齿廓间作用力沿着方向。 ( ①齿廓公切线②节圆公切线③中心线④基圆内公切线) 9. 机械是和的总称。 10. 若标准直齿圆柱齿轮与正变位齿轮的参数m,α,Z,h a*均相同,正变位齿轮与标准齿轮比较,其分度圆齿厚,齿槽宽,齿顶高,齿根高。 二、简答题(每题6分,共24分) 1. 计算图示机构自由度,若有复合铰链、局部自由度及虚约束需指出。
2. 用速度瞬心法求图示机构在该位置时滑块3的瞬时速度v 3(用符号表示)。 3. 重量G=40N 的滑块1,在倾角β=30°的驱动力P 作用下沿水平面做等速运动。接触面间摩擦系数f = 0.286,试用图解法求力P 。 4. 均质圆盘上装有二个螺钉并钻有一个孔,它们的不平衡重及位置如图所示,为使该圆盘平衡,拟在R=150mm 的圆周上加一重块Q ,试求Q 的大小及其所在方位(画在图上)。 三、已知某机械一个稳定运转循环内的等效阻力矩M r 如图所示,等效驱动力矩M d 为常数,等效构件的最大及最小角速度分别为n max =200r /min 及n max =180r /min 。试求: 1. 等效驱动力矩M d 的大小; 2. 运转的速度不均匀系数δ; 3. 当要求δ 在0.05范围内,并不计其余构件的转动惯量时,应装在等效构件上飞轮的转动惯量J f 。 (10分) 四、试设计一偏置曲柄滑块机构。设已知其滑块的行程速比系数K =1.5,滑块的冲程H =40mm ,偏距e =15mm 。并求其最大压力角αmax 。 (12分) 2题图 3题图 4题图
机械原理课后答案3章
3-2 在如图所示的齿轮-连杆组合机构中,试用瞬心法求齿轮1与3的传动比ω1/ω3。 顺时针)(v 16 13361331361331613113P P P P P P P P P ===ωωωω 3-3在如图3-32所示的四杆机构中,LAB=60mm ,LCD=90mm ,LAD=LBC=120mm ,ω2=rad/s , 试用瞬心法求: (1) 当φ=165°时,点C 的速度vc; (2) 当φ=165°时,构件3的BC 线上(或延长线上)速度最小的一点E 的位置及其速度 的大小; (3) 当vC=0时,φ角之值(有两个解)。
s m EP P P v P P v s m v s rad P P P P P P P P E C C CD C P /36.0143.055.2v (rad/s 55.2158.0403 .0/403.009.048.4(/48.438 .21738 .9710v 13313 34313 343414 2412242414 2441224224=?===== ==?=?==? == ==ωωωωωωωω顺时针)顺时针) 3-4在如图3-33所示的凸轮机构中,已知r=50mm ,LOA=30mm ,LAC=90mm ,φ1=90°, 凸轮1以角速度ω1=10rad/s 逆时针转动。试用瞬心法求从动件的角速度ω2。
顺时针) (/79.286 .12486 .3410v 23 1213 121223 1221312112s rad P P P P P P P P P =?== ==ωωωω 3-5在如图3-34所示的各机构中,已知各构件的尺寸及B 点的速度vB ,试作出其如图3-34所示位置时的速度多边形。 3-6在如图3-35所示的各机构中,已知各构件的尺寸,原动件1以等角速度ω1顺时针方向转动,试以图解法求机构在如图3-35所示位置时构件3上C 点的速度及角速度。