自控第二次实验报告
成绩
实验报告
实验二频率特性测试与频域分析法建模实验
实验时间第12周周三上午实验编号
同组同学无
一、实验目的
1.掌握频率特性的测试原理及方法。
2.学习根据所测定出的系统的频率特性,确定系统传递函数的方法。
二、实验内容
1.测定给定环节的频率特性。
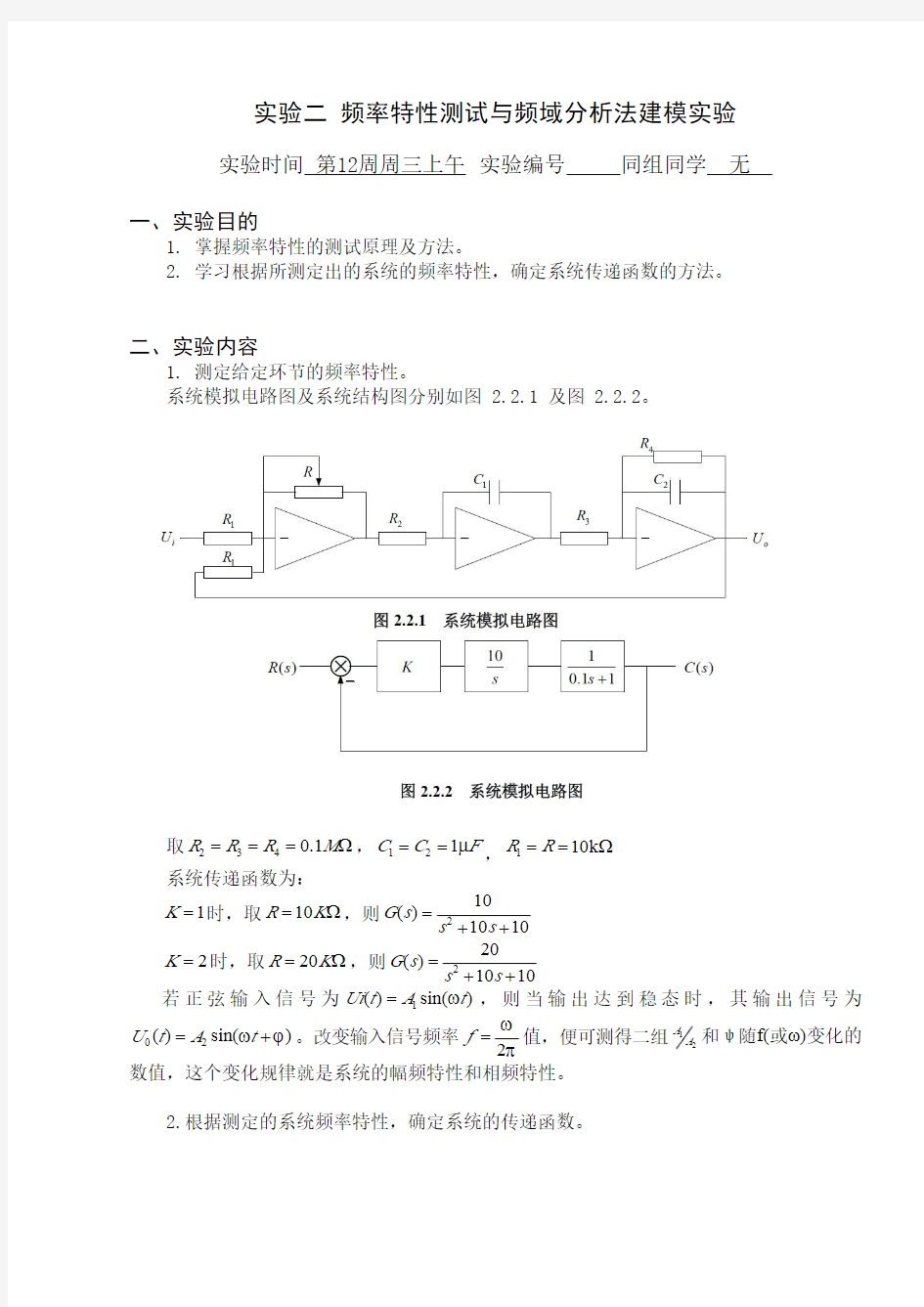
系统模拟电路图及系统结构图分别如图 2.2.1及图 2.2.2。
取Ω===M R R R 10.432,F C C μ121==,Ω==k 101R R 系统传递函数为:
1=K 时,取Ω=K R 10,则10
1010
)(2++=
s s s G 2=K 时,取Ω=K R 20,则10
1020
)(2
++=s s s G 若正弦输入信号为)sin()(1t A t Ui ω=,则当输出达到稳态时,其输出信号为)sin()(20?ω+=t A t U 。改变输入信号频率π
ω
2=
f 值,便可测得二组2
1
A A 和ψ随f(或ω)变化的
数值,这个变化规律就是系统的幅频特性和相频特性。
2.根据测定的系统频率特性,确定系统的传递函数。
三、实验原理
1.幅频特性即测量输入与输出信号幅值A 1及A 2,然后计算其比值A 2/A 1。
2.实验采用“李萨如图形”法进行相频特性的测试。以下简单介绍一下这种测试方法的原理。
设有两个正弦信号:
)sin()(t X t X m ωω=)
sin()(?ωω+=t Y t Y m 若以X (ωt )为横轴,Y (ωt )为纵轴,而以ω作为参变量,则随着ωt 的变化,
X (ωt )和Y (ωt )所确定的点的轨迹,将在X -Y 平面上描绘出一条封闭的曲线。这个图形就是物理学上所称的“李萨如图形”,如图2.2.3所示。
图2.2.3李沙育图形
3.相位差角的求法:
对于)sin()(t X t X m ωω=及)
sin()(?ωω+=t Y t Y m 当0=t ω时,有0)0(=X ;)sin()0(?m Y Y =即)/)0(arcsin(m Y Y =?,2/0π?≤≤时成立
4.记录实验结果数据填写表2.2.1。
表2.2.1实验结果数据表
编号
1
2
3
…
10
ω
A 2/A 1Y 0/Y m
四、实验设备
实验系统如图2.2.4所示,包括:
1.数字计算机
2.电子模拟机
3.万用表
4.测试导线
图2.2.4混合仿真系统实物图
五、实验步骤
1.熟悉HHMN-1型电子模拟机的使用方法。将各运算放大器接成比例器,通电调零。
2.断开电源,按照系统结构图和系统传递函数计算电阻和电容的取值,并按照模拟线
路图搭接线路。
3.谨慎连接输入、输出端口,不可接错。线路接好后,经教师检查后再通电
4.在Windows XP桌面用鼠标双击“MATLAB”图标后进入,在命令行处键入“a utolab”进入实验软件系统。
5.在系统菜单中选择实验项目,选择“实验二”
,其它
,在窗口左侧选择“实验模型”
步骤察看概述3.2节内容。
6.观测实验结果,记录实验数据,及时绘制实验结果图形,填写实验数据表格,完成实
验报告。采用示波器观察“输入”与“输出”波形,测定输出和输入的正弦曲线幅值。采用“XY Graph”观测李沙育图形。
7.研究性实验方法
实验者可自行确定待测系统传递函数,并建立系统的SIMULINK模型,验证自动
控制理论相关的理论知识。
六、实验结果
实验数据记录与计算
6.1.1K=1时的实验数据表
编号12345678910ω 1.5 3.5 5.57.59.511.513.515.517.519.5 A2/A1 1.021 1.045 1.055 1.0350.89840.71780.55660.41500.33690.2734 Y0/Y m0.20090.50460.75440.95770.95330.94550.75440.64720.54440.4107?/?11.5930.3048.9773.2772.4271.0048.9740.3332.9824.25
6.1.2.K=2时的实验数据表
编号12345678910ω 4.5 6.58.510.512.514.516.518.520.522.5 A2/A1 1.074 1.162 1.250 1.289 1.2350.9600.68820.43460.26860.1827 Y0/Y m0.36400.55070.78960.96120.99520.89380.81010.66420.54980.4251?21.3533.4152.1274.1582.7063.3654.0141.6233.3625.16
6.1.3实验图像
图6.1.1k=1,ω=9.5时的图像
图6.1.2k=2,ω=12.5时的图像
6.2求传递函数由二阶系统响应
设二阶震荡环节函数:2
2
22)(n
n n
s s s G ωζωω++=对数辐频特性:)
(ωj G M =特征点:
-9021
,===?ξ
ωωM n 易知,当Y 0/Y m 接近1时,ω=n ω,Ac /Ar=ξ
211
k=1时
90=?时,s
rad n /5.9=ωM=0.8984,故0.5565
=ξ故25
.9010.5790.25
2)(22
2
2++=++=s s s s s G n n n ωζωω理论值100
10100
)(2
++=s s s G 2
k=2时
90=?时,s
rad n /12.5=ωM=1.309,故0.3819
=ξ故156.25
9.55156.25
2)(22
22++=++=s s s s s G n n n ωζωω理论值100
1000
2)(2
++=s s s G
七、结果分析
误差分析:
1.所选的值有点少,没有真正找到=90度时所对应的正圆的。
2.计算误差:用计算器处理的数据,小数点几位被舍弃了,做成了一定的误差。
3.图像误差:在matlab中显示的李萨如图像中找Y0时有一定偏差。
4.仪器误差:电容电阻的标称值和实际值不一致。
八、收获、体会及建议
本次实验刚开始的值没有选择好,之前听老师说的只要大致是圆就行了,可以不用试完整的椭圆,所以自己就按照老师说的做了。不过,事实证明,如果做实验有多余时间的话,还是尽量去做的精确一些,这样对后来的数据处理和图像判定都有很大的帮助。
由于实验所要求数据有20组左右,所以大家做实验的时间平均来说比上次时间长。整体而言,这次做的实验明显比上次快的多了,因为这个的实验是以上次为基础的,从而循序渐进,慢慢学习,才会学习的更深入。
希望以后能多做实验,多上实验课。个人是非常喜欢这种教学模式的,毕竟单纯的理论学习不足以让大家对于自动控制掌握的特别深入,只有理论课与实践课想结合,才是让学生真正掌握的教学方法。我们这门课做到了,为自控实验点赞。
自动控制原理实验报告
《自动控制原理》 实验报告 姓名: 学号: 专业: 班级: 时段: 成绩: 工学院自动化系
实验一 典型环节的MATLAB 仿真 一、实验目的 1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。 2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。 3.定性了解各参数变化对典型环节动态特性的影响。 二、实验原理 1.比例环节的传递函数为 K R K R R R Z Z s G 200,1002)(211 212==-=-=- = 其对应的模拟电路及SIMULINK 图形如图1-3所示。 三、实验内容 按下列各典型环节的传递函数,建立相应的SIMULINK 仿真模型,观察并记录其单位阶跃响应波形。 ① 比例环节1)(1=s G 和2)(1=s G ; ② 惯性环节11)(1+= s s G 和1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节s s G =)(1 ⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G ⑥ 比例+积分环节(PI )s s G 11)(1+=和s s G 211)(2+= 四、实验结果及分析 图1-3 比例环节的模拟电路及SIMULINK 图形
① 仿真模型及波形图1)(1=s G 和2)(1=s G ② 仿真模型及波形图11)(1+= s s G 和1 5.01)(2+=s s G 11)(1+= s s G 1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节
自动控制实验报告1
东南大学自动控制实验室 实验报告 课程名称:自动控制原理 实验名称:闭环电压控制系统研究 院(系):仪器科学与工程专业:测控技术与仪器姓名:学号: 实验室:常州楼五楼实验组别:/ 同组人员:实验时间:2018/10/17 评定成绩:审阅教师: 实验三闭环电压控制系统研究
一、实验目的: (1)通过实例展示,认识自动控制系统的组成、功能。 (2)会正确实现闭环负反馈。 (3)通过开、闭环实验数据说明闭环控制效果。 二、实验原理: (1)利用各种实际物理装置(如电子装置、机械装置、化工装置等)在数学上的“相似性”,将各种实际物理装置从感兴趣的角度经过简化、并抽象成相同的数学形式。我们在设计控制系统时,不必研究每一种实际装置,而用几种“等价”的数学形式来表达、研究和设计。又由于人本身的自然属性,人对数学而言,不能直接感受它的自然物理属性,这给我们分析和设计带来了困难。所以,我们又用替代、模拟、仿真的形式把数学形式再变成“模拟实物”来研究。这样,就可以“秀才不出门,遍知天下事”。实际上,在后面的课程里,不同专业的学生将面对不同的实际物理对象,而“模拟实物”的实验方式可以做到举一反三,我们就是用下列“模拟实物”——电路系统,替代各种实际物理对象。 (2)自动控制的根本是闭环,尽管有的系统不能直接感受到它的闭环形式,如步进电机控制,专家系统等,从大局看,还是闭环。闭环控制可以带来想象不到的好处,本实验就是用开环和闭环在负载扰动下的实验数据,说明闭环控制效果。自动控制系统性能的优劣,其原因之一就是取决调节器的结构和算法的设计(本课程主要用串联调节、状态反馈),本实验为了简洁,采用单闭环、比例调节器K。通过实验证明:不同的K,对系性能产生不同的影响,以说明正确设计调节器算法的重要性。 (3)为了使实验有代表性,本实验采用三阶(高阶)系统。这样,当调节器K值过大时,控制系统会产生典型的现象——振荡。本实验也可以认为是一个真实的电压控制系统。 三、实验设备: THBDC-1实验平台 四、实验线路图: 五、实验步骤:
自控实验报告实验三 线性系统的根轨迹
实验三 线性系统的根轨迹 一、实验目的 1. 熟悉MATLAB 用于控制系统中的一些基本编程语句和格式。 2. 利用MATLAB 语句绘制系统的根轨迹。 3. 掌握用根轨迹分析系统性能的图解方法。 4. 掌握系统参数变化对特征根位置的影响。 二、实验报告 1.根据内容要求,写出调试好的MATLAB 语言程序,及对应的结果。 2. 记录显示的根轨迹图形,根据实验结果分析根轨迹的绘制规则。 3. 根据实验结果分析闭环系统的性能,观察根轨迹上一些特殊点对应的K 值,确定闭环系统稳定的范围。 4.写出实验的心得与体会。 三、实验内容 请绘制下面系统的根轨迹曲线同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围。 一、 ) 136)(22()(2 2 ++++=s s s s s K s G 1、程序代码: G=tf([1],[1,8,27,38,26]); rlocus (G); [k,r]=rlocfind(G) G_c=feedback(G,1); step(G_c) 2、实验结果:
-8-6 -4 -2 24 6 8 Root Locus Real Axis I m a g i n a r y A x i s selected_point = -8.8815 + 9.4658i k = 1.8560e+04 r = -10.2089 + 8.3108i -10.2089 - 8.3108i 6.2089 + 8.2888i 6.2089 - 8.2888i Time (seconds) A m p l i t u d e selected_point = -9.5640 - 7.6273i k = 1.3262e+04 r = -9.5400 + 7.6518i -9.5400 - 7.6518i 5.5400 + 7.6258i 5.5400 - 7.6258i Time (seconds) A m p l i t u d e
操作系统实验报告一
重庆大学 学生实验报告 实验课程名称操作系统原理 开课实验室DS1501 学院软件学院年级2013专业班软件工程2 班学生姓名胡其友学号20131802 开课时间2015至2016学年第一学期 总成绩 教师签名洪明坚 软件学院制
《操作系统原理》实验报告 开课实验室:年月日学院软件学院年级、专业、班2013级软件工 程2班 姓名胡其友成绩 课程名称操作系统原理 实验项目 名称 指导教师洪明坚 教师 评语教师签名:洪明坚年月日 1.实验目的: ?进入实验环境 –双击expenv/setvars.bat ?检出(checkout)EPOS的源代码 –svn checkout https://www.360docs.net/doc/3518847879.html,/svn/epos ?编译及运行 –cd epos/app –make run ?清除所有的临时文件 –make clean ?调试 –make debug ?在“Bochs Enhanced Debugger”中,输入“quit”退出调试 –调试指令,请看附录A 2.实验内容: ?编写系统调用“time_t time(time_t *loc)” –功能描述 ?返回从格林尼治时间1970年1月1日午夜起所经过的秒数。如果指针loc 非NULL,则返回值也被填到loc所指向的内存位置 –数据类型time_t其实就是long ?typedef long time_t; 3.实验步骤: ?Kernel space –K1、在machdep.c中,编写系统调用的实现函数“time_t sys_time()”,计算用户秒数。需要用到 ?变量g_startup_time,它记录了EPOS启动时,距离格林尼治时间1970年1午夜的秒数 ?变量g_timer_ticks
经典自控实验报告
控制理论: 实验一 典型环节的电路模拟与软件仿真 1. 比例(P )环节 1.1 实验电路 图中后一个单元为反相器,其中R 0=200K 。 1.2 实验设备 阶跃信号发生器(单位阶跃输入);电路单元U 6,U 12;直流数字电压表(测输入电压);“THBDC-1”软件 1.3实验数据及实验响应曲线 R 1=100K ,R 2=200K(K=2),R 0=200K 时 红色曲线为输入u i ,蓝色曲线为输出u o 。 注:为了更好的观测实验曲线,实验时可适当调节软件上的分频系数(一般调至刻度2)和“ ” 按钮(时基自动),以下实验同样。 2. 积分(I )环节 2.1 实验电路 图中后一个单元为反相器,其中R 0=200K 。 2.2 实验设备 阶跃信号发生器(单位阶跃输入),电路单元U 6,U 12,直流数字电压表(测输入电压),
“THBDC-1”软件 2.3实验数据及实验响应曲线 R=100K,C=10 uF,R0=200K ,(T=RC=100K×10uF=1)时, 红色曲线为输入u i,蓝色曲线为输出u o。 注:当实验电路中有积分环节时,实验前一定要用锁零单元进行锁零。 3. 比例积分(PI)环节 3.1 实验电路 图中后一个单元为反相器,其中R0=200K。 3.2实验设备 阶跃信号发生器(单位阶跃输入),电路单元U6,U12,直流数字电压表(测输入电压),“THBDC-1”软件 3.3实验数据及实验响应曲线 R1=100K,R2=100K,C=10uF ,R0=200K ,(K= R2/ R1=1,T=R1C=100K×10uF=1)时 红色曲线为输入u i,蓝色曲线为输出u o。 4. 比例微分(PD)环节
操作系统实验报告-实验二
操作系统实验报告——实验二:C编程环境 实验目的 1.熟悉Linux下C程序设计的环境; 2.对系统调用有初步了解。 实验内容 1.Linux下C语言程序的开发过程 a、在用户主目录下用vi编辑C语言源程序(源程序已附后),如:$vi hello.c。 b、用gcc编译C语言源程序:$gcc ./hello.c -o example 这里gcc是Linux下的C语言程序编译器(GNU C Compiler),./hello.c表示待编译的源文件是当前工作目录下的hello.c,-o example表示编译后产生的目标代码文件名为example。 c、若编译不正确,则进入vi修改源程序,否则,运行目标代码:$./example 。注意: 这只是gcc最基本的用法,其他常用选项有:-c , -S , -O , -O2, -g 等。 2.编辑、调试下面c语言程序,说明该程序的功能。 #include
自动控制原理实验报告
实验报告 课程名称:自动控制原理 实验项目:典型环节的时域相应 实验地点:自动控制实验室 实验日期:2017 年 3 月22 日 指导教师:乔学工 实验一典型环节的时域特性 一、实验目的 1.熟悉并掌握TDN-ACC+设备的使用方法及各典型环节模拟电路的构成方法。
2.熟悉各种典型环节的理想阶跃相应曲线和实际阶跃响应曲线。对比差异,分析原因。 3.了解参数变化对典型环节动态特性的影响。 二、实验设备 PC 机一台,TD-ACC+(或TD-ACS)实验系统一套。 三、实验原理及内容 下面列出各典型环节的方框图、传递函数、模拟电路图、阶跃响应,实验前应熟悉了解。 1.比例环节 (P) (1)方框图 (2)传递函数: K S Ui S Uo =) () ( (3)阶跃响应:) 0()(≥=t K t U O 其中 01/R R K = (4)模拟电路图: (5) 理想与实际阶跃响应对照曲线: ① 取R0 = 200K ;R1 = 100K 。 ② 取R0 = 200K ;R1 = 200K 。
2.积分环节 (I) (1)方框图 (2)传递函数: TS S Ui S Uo 1 )()(= (3)阶跃响应: ) 0(1)(≥= t t T t Uo 其中 C R T 0= (4)模拟电路图 (5) 理想与实际阶跃响应曲线对照: ① 取R0 = 200K ;C = 1uF 。 ② 取R0 = 200K ;C = 2uF 。
1 Uo 0t Ui(t) Uo(t) 理想阶跃响应曲线 0.4s 1 Uo 0t Ui(t) Uo(t) 实测阶跃响应曲线 0.4s 10V 无穷 3.比例积分环节 (PI) (1)方框图: (2)传递函数: (3)阶跃响应: (4)模拟电路图: (5)理想与实际阶跃响应曲线对照: ①取 R0 = R1 = 200K;C = 1uF。 理想阶跃响应曲线实测阶跃响应曲线 ②取 R0=R1=200K;C=2uF。 K 1 + U i(S)+ U o(S) + Uo 10V U o(t) 2 U i(t ) 0 0 .2s t Uo 无穷 U o(t) 2 U i(t ) 0 0 .2s t
一阶二阶自控原理实验报告
成绩 北京航空航天大学 自动控制原理实验报告 学院自动化科学与电气工程学院 专业方向电气工程及其自动化 班级120311 学号12031019 学生姓名毕森森 指导教师 自动控制与测试教学实验中心
实验一一、二阶系统的电子模拟及时域响应的动态测试 实验时间2014.10.28 实验编号29 同组同学无 一、实验目的 1. 了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。 2. 学习在电子模拟机上建立典型环节系统模型的方法。 3. 学习阶跃响应的测试方法。 二、实验内容 1. 建立一阶系统的电子模型,观测并记录在不同时间常数T时的跃响应曲线,并测定其过渡过程时间TS。 2. 建立二阶系统的电子模型,观测并记录在不同阻尼比ζ时的跃响应曲线,并测定其超调量σ%及过渡过程时间TS。 三、实验原理 1.一阶系统:系统传递函数为: 模拟运算电路如图1- 1所示: 图 1- 1 由图 1-1得 在实验当中始终取R 2= R 1 ,则K=1,T= R 2 C,取时间常数T分别为: 0.25、 0.5、1。 2.二阶系统: 其传递函数为: 令=1弧度/秒,则系统结构如图1-2所示: 图1-2 根据结构图,建立的二阶系统模拟线路如图1-3所示:
图1-3 取R 2C 1=1 ,R 3C 2 =1,则及ζ取不同的值ζ=0.25 , ζ=0.5 , ζ=1 四、实验设备 HHMN-1电子模拟机一台、PC 机一台、数字式万用表一块 五、实验步骤 1. 确定已断开电子模拟机的电源,按照实验说明书的条件和要求,根据计算的电阻电容值,搭接模拟线路; 2. 将系统输入端 与D/A1相连,将系统输出端 与A/D1相; 3. 检查线路正确后,模拟机可通电; 4. 双击桌面的“自控原理实验”图标后进入实验软件系统。 5. 在系统菜单中选择“项目”——“典型环节实验”;在弹出的对话框中阶跃信号幅值选1伏,单击按钮“硬件参数设置”,弹出“典型环节参数设置”对话框,采用默认值即可。 6. 单击“确定”,进行实验。完成后检查实验结果,填表记录实验数据,抓图记录实验曲线。 六、实验结果 1、一阶系统。
操作系统lab2实验报告
HUNAN UNIVERSITY 操作系统实验报告
目录 一、内容 (3) 二、目的 (3) 三、实验设计思想和练习题 (3) 练习0:填写已有实验 (3) 练习1:实现 first-fit 连续物理内存分配算法(需要编程) (3) 练习2:实现寻找虚拟地址对应的页表项(需要编程) (8) 练习3:释放某虚地址所在的页并取消对应二级页表项的映射(需要编程) (11) 运行结果 (13) 四、实验体会 (13)
一、内容 本次实验包含三个部分。首先了解如何发现系统中的物理内存;然后了解如何建立对物理内存的初步管理,即了解连续物理内存管理;最后了解页表相关的操作,即如何建立页表来实现虚拟内存到物理内存之间的映射,对段页式内存管理机制有一个比较全面的了解。 二、目的 1.理解基于段页式内存地址的转换机制; 2.理解页表的建立和使用方法; 3.理解物理内存的管理方法。 三、实验设计思想和练习题 练习0:填写已有实验 使用eclipse中的diff/merge工具将实验1的代码填入本实验中代码中有“LAB1”的注释相应部分。 练习1:实现 first-fit 连续物理内存分配算法(需要编程) 在实现first fit 内存分配算法的回收函数时,要考虑地址连续的空闲块之间的合并操作。提示:在建立空闲页块链表时,需要按照空闲页块起始地址来排序,形成一个有序的链表。可能会修改default_pmm.c 中的default_init,default_init_memmap,default_alloc_pages, default_free_pages等相关函数。请仔细查看和理解default_pmm.c中的注释。 请在实验报告中简要说明你的设计实现过程。请回答如下问题: 你的first fit算法是否有进一步的改进空间。 解答: 分析思路: (1)数据结构: A.每个物理页利用一个Page结构体表示,查看kern/mm/memlayout.h包括:
自动控制原理MATLAB仿真实验报告
实验一 MATLAB 及仿真实验(控制系统的时域分析) 一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点 1、 系统的典型响应有哪些? 2、 如何判断系统稳定性? 3、 系统的动态性能指标有哪些? 三、实验方法 (一) 四种典型响应 1、 阶跃响应: 阶跃响应常用格式: 1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。 2、),(Tn sys step ;表示时间范围0---Tn 。 3、),(T sys step ;表示时间范围向量T 指定。 4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。 2、 脉冲响应: 脉冲函数在数学上的精确定义:0 ,0)(1)(0 ?==?∞ t x f dx x f 其拉氏变换为:) ()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。 脉冲响应函数常用格式: ① )(sys impulse ; ② ); ,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法: 1、 利用pzmap 绘制连续系统的零极点图; 2、 利用tf2zp 求出系统零极点; 3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析 Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.
东南大学自控实验报告实验三闭环电压控制系统研究
东南大学自控实验报告实验三闭环电压控制系统研究
东南大学 《自动控制原理》 实验报告 实验名称:实验三闭环电压控制系统研究 院(系):专业: 姓名:学号: 实验室: 416 实验组别: 同组人员:实验时间:年 11月 24日评定成绩:审阅教师:
实验三闭环电压控制系统研究 一、实验目的: (1)经过实例展示,认识自动控制系统的组成、功能及自动控制原理课程所要解决的问题。 (2)会正确实现闭环负反馈。 (3)经过开、闭环实验数据说明闭环控制效果。 二、实验原理: (1)利用各种实际物理装置(如电子装置、机械装置、化工装置等)在数学上的“相似性”,将各种实际物理装置从感兴趣的角度经过简化、并抽象成相同的数学形式。我们在设计控制系统时,不必研究每一种实际装置,而用几种“等价”的数学形式来表示、研究和设计。又由于人本身的自然属性,人对数学而言,不能直接感受它的自然物理属性,这给我们分析和设计带来了困难。因此,我们又用替代、模拟、仿真的形式把数学形式再变成“模拟实物”来研究。这样,就能够“秀才不出门,遍知天下事”。实际上,在后面的课程里,不同专业的学生将面对不同的实际物理对象,而“模拟实物”的实验方式能够做到举一反三,我们就是用下列“模拟实物”——电路系统,替代各种实际物理对象。 (2)自动控制的根本是闭环,尽管有的系统不能直接感受到它的
闭环形式,如步进电机控制,专家系统等,从大局看,还是闭环。闭环控制能够带来想象不到的好处,本实验就是用开环和闭环在负载扰动下的实验数据,说明闭环控制效果。自动控制系统性能的优劣,其原因之一就是取决调节器的结构和算法的设计(本课程主要用串联调节、状态反馈),本实验为了简洁,采用单闭环、比例调节器K。经过实验证明:不同的K,对系性能产生不同的影响,以说明正确设计调节器算法的重要性。 (3)为了使实验有代表性,本实验采用三阶(高阶)系统。这样,当调节器K值过大时,控制系统会产生典型的现象——振荡。本实验也能够认为是一个真实的电压控制系统。 三、实验设备: THBDC-1实验平台 四、实验线路图: 五、实验步骤: (1)如图接线,建议使用运算放大器U8、U10、U9、U11、U13。
上海大学操作系统(二)实验报告(全)
评分: SHANGHAI UNIVERSITY 操作系统实验报告 学院计算机工程与科学 专业计算机科学与技术 学号 学生姓名
《计算机操作系统》实验一报告 实验一题目:操作系统的进程调度 姓名:张佳慧学号 :12122544 实验日期: 2015.1 实验环境: Microsoft Visual Studio 实验目的: 进程是操作系统最重要的概念之一,进程调度又是操作系统核心的主要内容。本实习要求学生独立地用高级语言编写和调试一个简单的进程调度程序。调度算法可任意选择或自行设计。例如,简单轮转法和优先数法等。本实习可加深对于进程调度和各种调度算法的理解。实验内容: 1、设计一个有n个进程工行的进程调度程序。每个进程由一个进程控制块(PCB)表示。进程控制块通常应包含下述信息:进程名、进程优先数、进程需要运行的时间、占用CPU的时间以及进程的状态等,且可按调度算法的不同而增删。 2、调度程序应包含2~3种不同的调度算法,运行时可任意选一种,以利于各种算法的分析比较。 3、系统应能显示或打印各进程状态和参数的变化情况,便于观察诸进程的调度过程。 操作过程: 1、本程序可选用优先数法或简单轮转法对五个进程进行调度。每个进程处于运行R(run)、就绪W(wait)和完成F(finish)三种状态之一,并假设起始状态都是就绪状态W。为了便于处理,程序进程的运行时间以时间片为单位计算。进程控制块结构如下: 进程控制块结构如下: PCB 进程标识数 链指针 优先数/轮转时间片数 占用 CPU 时间片数 进程所需时间片数 进程状态 进程控制块链结构如下:
其中:RUN—当前运行进程指针; HEAD—进程就绪链链首指针; TAID—进程就绪链链尾指针。2、算法与框图 (1) 优先数法。进程就绪链按优先数大小从高到低排列,链首进程首先投入运行。每过一个时间片,运行进程所需运行的时间片数减 1,说明它已运行了一个时间片,优先数也减 3,理由是该进程如果在一个时间片中完成不了,优先级应该降低一级。接着比较现行进程和就绪链链首进程的优先数,如果仍是现行进程高或者相同,就让现行进程继续进行,否则,调度就绪链链首进程投入运行。原运行进程再按其优先数大小插入就绪链,且改变它们对应的进程状态,直至所有进程都运行完各自的时间片数。 (2) 简单轮转法。进程就绪链按各进程进入的先后次序排列,进程每次占用处理机的轮转时间按其重要程度登入进程控制块中的轮转时间片数记录项(相当于优先数法的优先数记录项位置)。每过一个时间片,运行进程占用处理机的时间片数加 1,然后比较占用处理机的时间片数是否与该进程的轮转时间片数相等,若相等说明已到达轮转时间,应将现运行进程排到就绪链末尾,调度链首进程占用处理机,且改变它们的进程状态,直至所有进程完成各自的时间片。 (3) 程序框图
自控实验报告
实验报告册 课程名称:自动控制原理 指导老师:丁永前 班级: 姓名: 学号: 学期:20 16 —20 17 学年第 1 学期南京农业大学工学院教务处印
实验目录实验一:典型环节的模拟实验 实验二:典型系统瞬态响应和稳定性分析实验三:控制系统的频率特性 实验四:系统校正
实验名称:典型环节的模拟实验 一、实验目的 通过模拟实验电路,结合理论知识感性认识各基本环节在典型信号下的响应。通过实验初步了解实验装置的性能和结构,学会布线、设计和组合单元,学会软件的操作。 二、实验设备基本知识 ①准备:使运放处于工作状态. 将信号源单元(U1 SG)的ST端(插针)与+5V端(插针)用“短路块” 短接,使模拟电路中的场效应管(3DJ6)夹断,这时运放处于工作状态. ②阶跃信号的产生: 电路可采用图1一1所示电路.它由“单脉冲单元”(U0sp)及“电位器单元(U14P)组成. 图1—1 具体线路形成:在U 13 SP单元中,将H1与十5V插针用“短路决”短接, H2插针用排线接至U 14 P单元的X插针; 在U 14 P单元中,将 Z插针和GND插针用“短路块”短接,最后由插座的Y端输出 信号. 以后实验若再用到阶跃信号时,方法同上.不再赘述。 三、实验内容和步骤: (1)观测比例、积分、比例积分、比例微分和惯性环节的阶成响应曲线。(2)观测PID环节的响应 (3)根据实际搭建的模拟电路图的参数,求解各典型环节的传递函数,在Simulink中进行仿真,给出理论的响应曲线,并与实际响应曲线进行对比分析。 四、写出各典型环节在阶跃信号作用下的输出响应表达式(用参数表示) 1、比例环节:Uo/Ui=K
自控实验报告第四次_陈尧
成绩北京航空航天大学 自动控制原理实验报告 学院仪器科学与光电工程学院 专业方向惯性技术与导航仪器 班级 学号 学生姓名尧爸爸 指导教师 自动控制与测试教学实验中心
实验四控制系统数字仿真 目录 一、实验目的 (3) 二、实验内容 (3) 三、理论计算 (3) 1.求解ζ和主导极点所对应角度β (3) 2.用matlab绘制系统的根轨迹并找到主导极点 (3) 3.求解K值 (4) 四、计算机仿真 (5) 1. 实验程序 (5) ①四阶龙格库塔计算函数:RgKta.m (5) ②stepspecs.m (5) ③主程序test.m (7) 2. 超调量和ts (8) 3.阶跃响应曲线 (8) 五.实验总结 (9)
一、 实验目的 通过本实验掌握利用四阶龙格——库塔法进行控制系统数字仿真的方法,并分析系统参数改变对系统性能的影响。 二、 实验内容 已知系统结构如图4-1 : 图4-1 若输入为单位阶跃函数,计算当超调量分别为5%,25%,50%时K 的取值(用主导极点方法估算),并根据确定的K 值在计算机上进行数字仿真。 三、 理论计算 1.求解ζ和主导极点所对应角度β ①根据公式:%100%e πξσ-=?,可以解得相应的ξ 2.用matlab 绘制系统的根轨迹并找到主导极点 由cos β=ξ,过原点做倾角为180-β的直线,与系统根轨迹的交点即为系统主导极点。
代码如下: %%绘制跟轨迹和主导极点所在位置 % hold on; num=[1]; dun=[1,10,25,0]; rlocus(num,dun) t=-4:0.001:0; y1=-t*tan(46.37/57.3); y2=-t*tan(66.19/57.3); y3=-t*tan(77.555/57.3); plot(t,y1,t,y2,t,y3); 3.求解K值 由模值方程K?=s?p1|s?p2||s?p3|可解K
操作系统实验报告
操作系统教程 实 验 指 导 书 姓名: 学号: 班级:软124班 指导老师:郭玉华 2014年12月10日
实验一WINDOWS进程初识 1、实验目的 (1)学会使用VC编写基本的Win32 Consol Application(控制台应用程序)。 (2)掌握WINDOWS API的使用方法。 (3)编写测试程序,理解用户态运行和核心态运行。 2、实验内容和步骤 (1)编写基本的Win32 Consol Application 步骤1:登录进入Windows,启动VC++ 6.0。 步骤2:在“FILE”菜单中单击“NEW”子菜单,在“projects”选项卡中选择“Win32 Consol Application”,然后在“Project name”处输入工程名,在“Location”处输入工程目录。创建一个新的控制台应用程序工程。 步骤3:在“FILE”菜单中单击“NEW”子菜单,在“Files”选项卡中选择“C++ Source File”, 然后在“File”处输入C/C++源程序的文件名。 步骤4:将清单1-1所示的程序清单复制到新创建的C/C++源程序中。编译成可执行文件。 步骤5:在“开始”菜单中单击“程序”-“附件”-“命令提示符”命令,进入Windows“命令提示符”窗口,然后进入工程目录中的debug子目录,执行编译好的可执行程序: E:\课程\os课\os实验\程序\os11\debug>hello.exe 运行结果 (如果运行不成功,则可能的原因是什么?) : 有可能是因为DOS下路径的问题 (2)计算进程在核心态运行和用户态运行的时间 步骤1:按照(1)中的步骤创建一个新的“Win32 Consol Application”工程,然后将清单1-2中的程序拷贝过来,编译成可执行文件。 步骤2:在创建一个新的“Win32 Consol Application”工程,程序的参考程序如清单1-3所示,编译成可执行文件并执行。 步骤3:在“命令提示符”窗口中运行步骤1中生成的可执行文件,测试步骤2中可执行文件在核心态运行和用户态运行的时间。 E:\课程\os课\os实验\程序\os12\debug>time TEST.exe 步骤4:运行结果 (如果运行不成功,则可能的原因是什么?) : 因为程序是个死循环程序 步骤5:分别屏蔽While循环中的两个for循环,或调整两个for循环的次数,写出运行结果。 屏蔽i循环: 屏蔽j循环: _______________________________________________________________________________调整循环变量i的循环次数:
北航自动控制原理实验报告(完整版)
自动控制原理实验报告 一、实验名称:一、二阶系统的电子模拟及时域响应的动态测试 二、实验目的 1、了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系 2、学习在电子模拟机上建立典型环节系统模型的方法 3、学习阶跃响应的测试方法 三、实验内容 1、建立一阶系统的电子模型,观测并记录在不同时间常数T时的响应曲线,测定过渡过程时间T s 2、建立二阶系统电子模型,观测并记录不同阻尼比的响应曲线,并测定超调量及过渡过程时间T s 四、实验原理及实验数据 一阶系统 系统传递函数: 由电路图可得,取则K=1,T分别取:0.25, 0.5, 1 T 0.25 0.50 1.00 R2 0.25MΩ0.5M Ω1MΩ C 1μ1μ1μ T S 实测0.7930 1.5160 3.1050 T S 理论0.7473 1.4962 2.9927 阶跃响应曲线图1.1 图1.2 图1.3 误差计算与分析 (1)当T=0.25时,误差==6.12%; (2)当T=0.5时,误差==1.32%; (3)当T=1时,误差==3.58% 误差分析:由于T决定响应参数,而,在实验中R、C的取值上可能存在一定误差,另外,导线的连接上也存在一些误差以及干扰,使实验结果与理论值之间存在一定误差。但是本实验误差在较小范围内,响应曲线也反映了预期要求,所以本实验基本得到了预期结果。 实验结果说明 由本实验结果可看出,一阶系统阶跃响应是单调上升的指数曲线,特征有T确定,T越小,过度过程进行得越快,系统的快速性越好。 二阶系统 图1.1 图1.2 图1.3
系统传递函数: 令 二阶系统模拟线路 0.25 0.50 1.00 R4 210.5 C2 111 实测45.8% 16.9% 0.6% 理论44.5% 16.3% 0% T S实测13.9860 5.4895 4.8480 T S理论14.0065 5.3066 4.8243 阶跃响应曲线图2.1 图2.2 图2.3 注:T s理论根据matlab命令[os,ts,tr]=stepspecs(time,output,output(end),5)得出,否则误差较大。 误差计算及分析 1)当ξ=0.25时,超调量的相对误差= 调节时间的相对误差= 2)当ξ=0.5时,超调量的相对误差==3.7% 调节时间的相对误差==3.4% 4)当ξ=1时,超调量的绝对误差= 调节时间的相对误差==3.46% 误差分析:由于本试验中,用的参量比较多,有R1,R2,R3,R4;C1,C2;在它们的取值的实际调节中不免出现一些误差,误差再累加,导致最终结果出现了比较大的误差,另外,此实验用的导线要多一点,干扰和导线的传到误差也给实验结果造成了一定误差。但是在观察响应曲线方面,这些误差并不影响,这些曲线仍旧体现了它们本身应具有的特点,通过比较它们完全能够了解阶跃响应及其性能指标与系统参数之间的关系,不影响预期的效果。 实验结果说明 由本实验可以看出,当ωn一定时,超调量随着ξ的增加而减小,直到ξ达到某个值时没有了超调;而调节时间随ξ的增大,先减小,直到ξ达到某个值后又增大了。 经理论计算可知,当ξ=0.707时,调节时间最短,而此时的超调量也小于5%,此时的ξ为最佳阻尼比。此实验的ξ分布在0.707两侧,体现了超调量和调节时间随ξ的变化而变化的过程,达到了预期的效果。 图2.2 图2.1 图2.3
自控实验报告-系统校正
西安邮电学院 自动控制原理 实验报告
实验三系统校正 一,实验目的 1.了解和掌握系统校正的一般方法。 2.熟悉掌握典型校正环节的模拟电路构成方法。二.实验原理及电路 1.未校正系统的结构方框图 图1 2.校正前系统的参考模拟方框图 图2 3.校正后系统的结构方框图
图3 4.校正后系统的模拟电路图 图4 三.实验内容及步骤 1.测量未校正系统的性能指标 (1)按图2接线 (2)加入阶跃电压观察阶跃响应曲线,并测出超调量和调节时间,并将曲线和参数记录出来。 2.测量校正系统的性能指标 (1)按图4接线
(2)加入阶跃电压,观察阶跃响应曲线,并测出超调量以及调节时间。 四.实验结果 未校正系统 理论值σ% = 60.4% t s = 3.5s 测量值σ% = 60% t s = 2.8s 校正后系统 理论值σ% = 16.3% t s = 0.35s 测量值σ% = 5% t s = 0.42s
五.心得体会 在课本的第六章,我们学习了线性系统的校正方法,包括串联校正、反馈校正以及复合校正等矫正方法,相对于之前学习的内容,理解起来相对难一些,做起实验来也不容易上手。试验期间,遇到了很多难题,反复调整修改甚至把连接好的电路全都拆了重连,最后终于完成了实验。相对于之前的几次试验,这次实验师最让人头疼的,幸好之前积累了些经验,才使得我们这次实验的时候不至于手忙脚乱,但是也并不轻松。 虽然遇到的困难很多,但是我们却收获的更多,线性系统的校正是自动控制原理中重要的部分,通过理论课的学习,再加上实验课的实践,我终于对这些内容有个系统的理解。
操作系统实验报告.
学生学号0121210680225 实验课成绩 武汉理工大学 学生实验报告书 实验课程名称操作系统 开课学院计算机科学与技术学院 指导老师姓名刘军 学生姓名李安福 学生专业班级软件sy1201 2014 — 2015 学年第一学期
《操作系统》实验教学大纲 课程编号: 课程名称:操作系统/Operating System 实验总学时数:12学时 适应专业:计算机科学与技术、软件工程 承担实验室:计算机科学与技术学院实验中心 一、实验教学的目的和任务 通过实验掌握Linux系统下常用键盘命令、系统调用、SHELL编程、后台批处理和C程序开发调试手段等基本用法。 二、实验项目及学时分配 序号实验项目名称实验学时实验类型开出要求 01 Linux键盘命令和vi 2 设计必开 02 Linux下C编程 2 设计必开 03 SHELL编程和后台批处理 2 设计必开 04 Linux系统调用(time) 2 设计必开 05 Linux进程控制(fork) 4 设计必开 三、每项实验的内容和要求: 1、Linux键盘命令和vi 要求:掌握Linux系统键盘命令的使用方法。 内容:见教材p4, p9, p40, p49-53, p89, p100 2、Linux下的C编程 要求:掌握vi编辑器的使用方法;掌握Linux下C程序的源程序编辑方法;编译、连接和运行方法。 内容:设计、编辑、编译、连接以及运行一个C程序,其中包含键盘输入和屏幕输出语句。 3、SHELL编程和后台批处理 要求:掌握Linux系统的SHELL编程方法和后台批处理方法。 内容:(1) 将编译、连接以及运行上述C程序各步骤用SHELL程序批处理完成,前台运行。 (2) 将上面SHELLL程序后台运行。观察原C程序运行时输入输出情况。 (3) 修改调试上面SHELL程序和C程序,使得在后台批处理方式下,原键 盘输入内容可以键盘命令行位置参数方式交互式输入替代原键盘输入内容, 然后输出到屏幕。 4、Linux系统调用使用方法。
西安交大自动控制原理实验报告
自动控制原理实验报告 学院: 班级: 姓名: 学号:
西安交通大学实验报告 课程自动控制原理实验日期2014 年12月22 日专业班号交报告日期 2014 年 12月27日姓名学号 实验五直流电机转速控制系统设计 一、实验设备 1.硬件平台——NI ELVIS 2.软件工具——LabVIEW 二、实验任务 1.使用NI ELVIS可变电源提供的电源能力,驱动直流马达旋转,并通过改变电压改变 其运行速度; 2.通过光电开关测量马达转速; 3.通过编程将可变电源所控制的马达和转速计整合在一起,基于计算机实现一个转速自 动控制系统。 三、实验步骤 任务一:通过可变电源控制马达旋转 任务二:通过光电开关测量马达转速 任务三:通过程序自动调整电源电压,从而逼近设定转速
编程思路:PID控制器输入SP为期望转速输出,PV为实际测量得到的电机转速,MV为PID输出控制电压。其中SP由前面板输入;PV通过光电开关测量马达转速得到;将PID 的输出控制电压接到“可变电源控制马达旋转”模块的电压输入控制端,控制可变电源产生所需的直流电机控制电压。通过不断地检测马达转速与期望值对比产生偏差,通过PID控制器产生控制信号,达到直流电机转速的负反馈控制。 PID参数:比例增益:0.0023 积分时间:0.010 微分时间:0.006 采样率和待读取采样:采样率:500kS/s 待读取采样:500 启动死区:电机刚上电时,速度为0,脉冲周期测量为0,脉冲频率测量为无限大。通过设定转速的“虚拟下限”解决。本实验电机转速最大为600r/min。故可将其上限值设为600r/min,超过上限时,转速的虚拟下限设为200r/min。 改进:利用LabVIEW中的移位寄存器对转速测量值取滑动平均。
自动控制原理实验报告73809
-150-100 -50 50 实验一 典型环节的模拟研究及阶跃响应分析 1、比例环节 可知比例环节的传递函数为一个常数: 当Kp 分别为0.5,1,2时,输入幅值为1.84的正向阶跃信号,理论上依次输出幅值为0.92,1.84,3.68的反向阶跃信号。实验中,输出信号依次为幅值为0.94,1.88,3.70的反向阶跃信号, 相对误差分别为1.8%,2.2%,0.2%. 在误差允许范围内可认为实际输出满足理论值。 2、 积分环节 积分环节传递函数为: (1)T=0.1(0.033)时,C=1μf (0.33μf ),利用MATLAB ,模拟阶跃信号输入下的输出信号如图: T=0.1 T=0.033 与实验测得波形比较可知,实际与理论值较为吻合,理论上T=0.033时的波形斜率近似为T=0.1时的三倍,实际上为8/2.6=3.08,在误差允许范围内可认为满足理论条件。 3、 惯性环节 i f i o R R U U -=TS 1 CS R 1Z Z U U i i f i 0-=-=-=15 20
惯性环节传递函数为: K = R f /R 1,T = R f C, (1) 保持K = R f /R 1 = 1不变,观测T = 0.1秒,0.01秒(既R 1 = 100K,C = 1μf , 0.1μf )时的输出波形。利用matlab 仿真得到理论波形如下: T=0.1时 t s (5%)理论值为300ms,实际测得t s =400ms 相对误差为:(400-300)/300=33.3%,读数误差较大。 K 理论值为1,实验值2.12/2.28, 相对误差为(2.28-2.12)/2.28=7%与理论值 较为接近。 T=0.01时 t s (5%)理论值为30ms,实际测得t s =40ms 相对误差为:(40-30)/30=33.3% 由于ts 较小,所以读数时误差较大。 K 理论值为1,实验值2.12/2.28, 相对误差为(2.28-2.12)/2.28=7%与理论值较为接近 (2) 保持T = R f C = 0.1s 不变,分别观测K = 1,2时的输出波形。 K=1时波形即为(1)中T0.1时波形 K=2时,利用matlab 仿真得到如下结果: t s (5%)理论值为300ms,实际测得t s =400ms 相对误差为:(400-300)/300=33.3% 读数误差较大 K 理论值为2,实验值4.30/2.28, 1 TS K )s (R )s (C +-=
操作系统实验报告1
操作系统 实验报告 班号:1303107 学号:1130310726 姓名:蔡鹏
1.请简述head.s 的工作原理。 head.s实在32位保护模式下运行的。我认为这段程序主要包括两个部分:1.初始化设置。2.任务执行与切换。 初始设置主要包括了:1.设置GDT表2.设置系统定时芯片3. 设置IDT表(0x08时钟中断和0x80系统调用中断)4.切换到任务0执行 任务切换和执行包括了:1.任务0和任务1 , 2.时钟中断, 3.系统中断 两个任务的在LDT中代码段和数据段描述符的内容都设置为:基地址0x0000;段限长值为0x03ff,实际段长度为4MB。因此在线性地址空间中这个?内核?的代码和数据段与任务的代码和数据段都从线性地址0开始并且由于没有采用分页机制,所以他们都直接对应物理地址0开始处。 为了每隔10毫秒切换运行的任务,head.s程序中把定时器芯片8253的通道0设置成每隔10毫秒就向中断控制芯片8259A发送一个时钟中断请求信号。PC机的ROM BIOS开机时已经在8259A中把时钟中断请求信号设置成中断向量8,因此我们需要在中断8的处理过程中执行任务切换操作。任务切换的实现是查看current变量中的当前运行的任务号,如果为0,就利用任务1的TSS选择符作为操作数执行远跳转指令,从而切换到任务1中,否则反之。
每个任务在执行时,会首先把一个字符的ASCII码放入寄存器AL中,然后调用系统中断调用int 0x80,而该系统调用处理过程则会调用一个简单的字符写屏子程序,把寄存器AL中的字符显示在屏幕上,同时把字符显示的屏幕的下一个位置记录下来,作为下一次显示字符用。在显示过一个字符后,任务代码会使用循环语句延迟一段时间,然后又跳转到任务代码开始处继续循环执行,直到运行了10毫秒而发生了定时中断,从而代码会切换到另一个任务执行。对于任务A,寄存器AL中始终存放字符‘A’,而任务B运行时AL中始终存放字符‘B’。因此程序运行时我们将看到一连串的‘A’和一连串的‘B’间隔的连续不断的显示在屏幕上。若出现了一个‘C’,是由于PC机偶然产生了一个不是时钟中断和系统调用中断的其他中断。因为我们已经在程序中给所有其他中断安装了一个默认中断处理程序。当出现一个其他中断时,系统就会运行这个中断处理程序,于是就会在屏幕上显示一个‘C’,然后退出中断。 4.请记录head.s 的内存分布状况,写明每个数据段,代码段,栈段 的起始与终止的内存地址。