ARM9嵌入式复习总结

ARM9嵌入式复习
第一章
1.嵌入式微处理器的分类。
a)什么是嵌入式微处理器?
1.嵌入式微处理器是嵌入式系统硬件层的核心,嵌入式微处理器将通用CPU中许多
由板卡完成的任务集成到芯片内部,从而有利于系统设计趋于小型化、高效率和高可靠性。嵌入式微处理器大多工作在为特定用户群所专门设计的系统中。
2.嵌入式微处理器的体系结构可以采用冯·诺依曼体系结构或哈佛体系结构,指令
系统可以选用精简指令系统(Reduced Instruction Set Computer,RISC)和复杂指令集系统CISC(Complex Instruction Set Computer, CISC)。
b) 嵌入式微处理器分类
1.按照系列分:ARM系列、MIPS系列、PowerPC系列。
2.按照指令复杂程度分:CISC和RISC两类
2.微处理器划分:
a)嵌入式微控制器
b)嵌入式微处理器
c)DSP处理器
d)嵌入式片上系统
e)多核处理器
3.嵌入式操作系统(EOS)的特性
EOS除具备了一般操作系统最基本的任务调度、同步机制、中断处理、文件处理等功能外,还具有如下特点:强实时性;支持开放性和可伸缩性的体系结构,具有可裁减性;提供统一的设备驱动接口;提供操作方便、简单、友好的图形GUI和图形界面;支持TCP/IP协议及其他协议,提供TCP/UDP/IP/PPP协议支持及统一的MAC访问层接口,提供强大的网络功能。
第二章
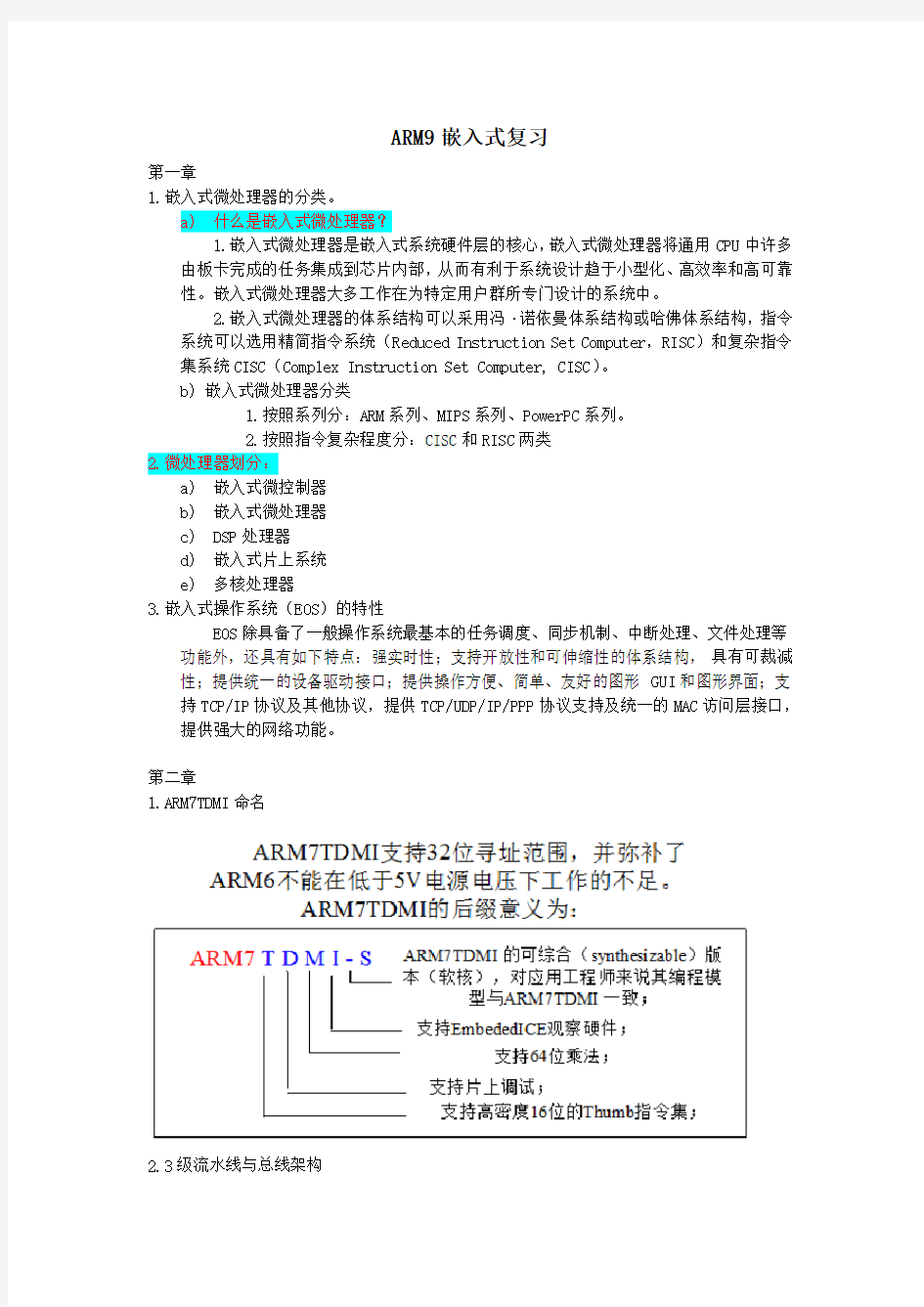
1.ARM7TDMI命名
2.3级流水线与总线架构
三级流水线:
流水线使用3个阶段,因此指令分为3个阶段执行
1.取指:从程序存储器中读取指令,放入流水线中
2.译码:操作码和操作数被译码,决定执行什么功能,为下一个始终周期准备数据路
径所需要的控制信号。
3.执行:执行已译码的指令
注:程序计数器(PC)指向被取指的指令,而不是指向正在执行的指令
在正常操作的过程中,在执行一条指令的同时对下一条指令进行译码,并将第三条指令从存储器中取出
3.ARM的两种状态与7种工作模式
a)两种状态。
i.ARM状态:32位,这种状态下执行的是字方式的ARM指令;
ii.Thumb状态:16位,这种状态下执行半字方式的Thumb指令。
注:两个状态之间的切换并不影响处理器模式或寄存器内容,可以使用BX指令切换两种状态.状态寄存器CPSR的T位反应了处理器运行不同指令的当前状态.
b)7种工作模式。
注:除用户模式外,其它模式均为特权模式。ARM内部寄存器和一些片内外设在硬件设计上只允许(或者可选为只允许)特权模式下访问。此外,特权模式可以自由的切换处理器模式,而用户模式不能直接切换到别的模式。
题目:ARM微处理器复位后,PC的地址通常是 0x0 ,初始的工作模式是Supervisor
4.ARM常用几个寄存器功能
在ARM7TDMI处理器内部有37个用户可见的寄存器。31个通用32位寄存器,6个状态寄存器。
a.堆栈寄存器(SP):R13,在ARM指令集当中,没有以特殊方式使用R13的指令或其它
功能,只是习惯上都这样使用。但是在Thumb指令集中存在使用R13的指令。
b.链接寄存器(LR):R14,在结构上有两个特殊功能:
1.在每种模式下,模式自身的R14版本用于保存子程序返回地址;
2.当发生异常时,将R14对应的异常模式版本设置为异常返回地址(有些异常有一
个小的固定偏移量)。
c.程序计数器(PC):R15,在ARM状态,位[1:0]为0,位[31:2]保存PC。在Thumb状
态,位[0]为0,位[31:1]保存PC。对于ARM指令集而言,PC总是指向当前指令的下两条指令的地址,即PC的值为当前指令的地址值加8字节。
d.程序状态寄存器(CPSR):R16,在所有处理器模式下都可以访问CPSR。每种异常模
式都有一个程序状态保存寄存器(SPSR),在异常发生时,SPSR用于保存CPSR的状态。
5.条件代码标志
N 运算结果的最高位反映在该标志位。对于有符号二进制补码,结果为负数时N=1,结果为正数或零时N=0;
Z 指令结果为0时Z=1(通常表示比较结果“相等”),否则Z=0;
C 当进行加法运算(包括CMN指令),并且最高位产生进位时C=1,否则C=0。当进行
减法运算(包括CMP 指令),并且最高位产生借位时C=0,否则C=1。对于结合移位
操作的非加法/减法指令,C为从最高位最后移出的值,其它指令C通常不变;
V 当进行加法/减法运算,并且发生有符号溢出时V=1,否则V=0,其它指令V通常不变。
附:控制位
I、F中断控制位——控制允许和禁止中断
T控制(标志)位——反映处理器的运行状态
M控制位——决定了处理器的运行模式
6.中断号、中断向量与优先级。(7种异常)
7.存储器格式。
a)ARM体系结构使用232个字节的单一、线性地址空间。将字节地址做为无符号数看
待,范围为0~232-1
b)对于字对齐的地址A,地址空间规则要求如下:
●地址位于A的字由地址为A、A+1、A+2和A+3的字节组成;
●地址位于A的半字由地址为A和A+1的字节组成;
●地址位于A+2的半字由地址为A+2和A+3的字节组成;
●地址位于A的字由地址为A和A+2的半字组成。
注:这样并不能完全定义字,半字和字节之间的映射。
存储器采用下列映射机制中的一种。
大端存储:字数据的高字节存储在低地址中,而字数据的低字节则存放在高地址中
小端存储:低地址中存放的是字数据的低字节,高地址存放的是字数据的高字节例如,假设一个32位字长的微处理器上定义一个int类型的常量a,其内存地址位于0x6000处,其值用十六进制表示为0x23456789。如图1.2.2(a)所示,
如果按小端法存储,则其最低字节数据0x89存放在内存低地址0x6000处,最高字节数据0x23存放在内存高地址0x6003处。如图1.2.2(b)所示,
如果按大端法存储,则其最高字节数据0x23存放在内存的低地址0x6000处,而最低字节数据0x89存放在内存的高地址0x6003处。
第三章
一:寻址方式。
1.寄存器寻址
操作数的值在寄存器中,指令中的地址码字段给出的是寄存器编号,寄存器的内容是操作数,指令执行时直接取出寄存器值操作。
例如指令:
MOV R1,R2 ;R1←R2
SUB R0,R1,R2 ;R0←R1- R2
2.立即寻址
在立即寻址指令中数据就包含在指令当中,立即寻址指令的操作码字段后面的地址码部分就是操作数本身,取出指令也就取出了可以立即使用的操作数(也称为立即数)。立即数要以“#”为前缀,表示16进制数值时以“0x”表示。
SUBS R0,R0,#1 ;R0减1,结果放入R0,并且影响标志位
MOV R0,#0xFF000 ;将立即数0xFF000装入R0寄存器
3.寄存器移位寻址。
寄存器移位寻址是ARM指令集特有的寻址方式。当第2个操作数是寄存器移位方式时,第2个寄存器操作数在与第1个操作数结合之前,选择进行移位操作。寄存器移位寻址指令举例如下:
MOV R0,R2,LSL #3 ;R2的值左移3位,结果放入R0,即是R0=R2×8
ANDS R1,R1,R2,LSL R3 ;R2的值左移R3位,然后和R1相“与”操作,结果放入R1 4.寄存器间接寻址
寄存器间接寻址指令中的地址码给出的是一个通用寄存器的编号,所需的操作数保存在寄存器指定地址的存储单元中,即寄存器为操作数的地址指针。寄存器间接寻址指令举例如下:
LDR R1,[R2] ;将R2指向的存储单元的数据读出保存在R1中
SWP R1,R1,[R2] ;将寄存器R1的值和R2指定的存储单元的内容交换
5.基址寻址
基址寻址就是将基址寄存器的内容与指令中给出的偏移量相加,形成操作数的有效地址。基址寻址用于访问基址附近的存储单元,常用于查表、数组操作、功能部件寄存器访问等。基址寻址指令举例如下:
LDR R2,[R3,#0x0C] ;读取R3+0x0C地址上的存储单元的内容,放入R2
STR R1,[R0,#-4]! ;先R0=R0-4,然后把R1的值寄存到保存到R0指定的存储单元
6.多寄存器寻址
多寄存器寻址一次可传送几个寄存器值,允许一条指令传送16个寄存器的任何子集或所有寄存器。多寄存器寻址指令举例如下:
LDMIA R1!,{R2-R7,R12} ;将R1指向的单元中的数据读出到R2~R7、R12中(R1自
动加1)
STMIA R0!,{R2-R7,R12} ;将寄存器R2~R7、R12的值保存到R0指向的存储单元中
R0自动加1
7.堆栈寻址
堆栈是一个按特定顺序进行存取的存储区,操作顺序为“后进先出”。堆栈寻址是隐含的,它使用一个专门的寄存器(堆栈指针)指向一块存储区域(堆栈),指针所指向的存储单元即是堆栈的栈顶。存储器堆栈可分为两种:
向上生长:向高地址方向生长,称为递增堆栈
向下生长:向低地址方向生长,称为递减堆栈
8.块拷贝寻址
多寄存器传送指令用于将一块数据从存储器的某一位置拷贝到另一位置。如:
STMIA R0!,{R1-R7} ;将R1~R7的数据保存到存储器中。
;存储指针在保存第一个值之后增加,
;增长方向为向上增长。
STMIB R0!,{R1-R7} ;将R1~R7的数据保存到存储器中。
;存储指针在保存第一个值之前增加,
;增长方向为向上增长。
9.相对寻址
相对寻址是基址寻址的一种变通。由程序计数器PC提供基准地址,指令中的地址码字段作为偏移量,两者相加后得到的地址即为操作数的有效地址。相对寻址指令举例如下:BL SUBR1 ;调用到SUBR1子程序
BEQ LOOP ;条件跳转到LOOP标号处
...
LOOP MOV R6,#1
...
SUBR1 ...
二:指令集(LDR STR MOV ADD SUB)
1.ARM指令集
2.Thumb指令集
3.常用指令
a)LDR:加载字数据
b)STR:存储字数据
LDR/STR指令寻址非常灵活,它由两部分组成,其中一部分为一个基址寄存器,可以为
任一个通用寄存器;另一部分为一个地址偏移量。地址偏移量有以下3种格式:
立即数。立即数可以是一个无符号的数值。这个数据可以加到基址寄存器,也可以从基址寄存器中减去这个数值。
如:LDR R1,[R0,#0x12]
寄存器。寄存器中的数值可以加到基址寄存器,也可以从基址寄存器中减去这个数值。如:LDR R1,[R0,R2]
寄存器及移位常数。寄存器移位后的值可以加到基址寄存器,也可以从基址寄存器中减去这个数值。
如:LDR R1,[R0,R2,LSL #2]
从寻址方式的地址计算方法分,加载/存储指令有以下4种格式:
零偏移。如:LDR Rd,[Rn]
前索引偏移。如:LDR Rd,[Rn,#0x04]!
程序相对偏移。如:LDR Rd,labe1
后索引偏移。如:LDR Rd,[Rn],#0x04
c)MOV:数据传送指令
d)ADD:加法运算指令
e)SUB:减法运算指令
第四章
一:最小系统
一个嵌入式处理器自己是不能独立工作的,必须给它供电、加上时钟信号、提供复位信号,如果芯片没有片内程序存储器,则还要加上存储器系统,然后嵌入式处理器芯片才可能工作。这些提供嵌入式处理器运行所必须的条件的电路与嵌入式处理器共同构成了这个嵌入式处理器的最小系统。而大多数基于ARM7处理器核的微控制器都有调试接口,这部分在芯片实际工作时不是必需的,但因为这部分在开发时很重要,所以也把这部分也归入最小系统中。
二:时钟产生单元
目前所有的微控制器均为时序电路,需要一个时钟信号才能工作,大多数微控制器具有晶体振荡器。简单的方法是利用微控制器内部的晶体振荡器,但有些场合(如减少功耗、需要严格同步等情况)需要使用外部振荡源提供时钟信号。
三:I2C的概念与应用
I2C BUS(Inter Integrated Circuit BUS,内部集成电路总线)是由Philips公司推出的二线制串行扩展总线,用于连接微控制器及其外围设备。I2C总线是具备总线仲裁和高低速设备同步等功能的高性能多主机总线,直接用导线连接设备,通信时无需片选信号。
如图6.2.1所示,在I2C总线上,只需要两条线—串行数据SDA线和串行时钟SCL线,它们用于总线上器件之间的信息传递。SDA和SCL都是双向的。每个器件都有一个唯一的地址以供识别,而且各器件都可以作为一个发送器或接收器(由器件的功能决定)。
2C总线有如下操作模式:主发送模式、主接收模式、从发送模式、从接收模式。下面介绍其通用传输过程、信号及数据格式。
*数据有效:在传输数据的时候,SDA线必须在时钟的高电平周期保持稳定,SDA的高或低电平状态只有在SCL线的时钟信号是低电平时才能改变.
*起始停止
当I2C接口处于从模式时,要想数据传输,必须检测SDA线上的启动信号,启动信号由主器件产生。如图6.2.2所示,在SCL信号为高时,SDA产生一个由高变低的电平变化,即产生一个启动信号。当I2C总线上产生了启动信号后,那么这条总线就被发出启动信号的主器件占用了,变成“忙”状态;如图6.2.2所示,在SCL信号为高时,SDA 产生一个由低变高的电平变化,产生停止信号。停止信号也由主器件产生,作用是停止与某个从器件之间的数据传输。当I2C总线上产生了一个停止信号后,那么在几个时钟周期之后总线就被释放,变成“闲”状态。主器件产生一个启动信号后,它还会立即送出一个从地址,用来通知将与它进行数据通信的从器件。1个字节的地址包括7位的地址信息和1位的传输方向指示位,如果第7位为“0”,表示马上要进行一个写操作;如果为“1”,表示马上要进行一个读操作。
*传输格式
SDA线上传输的每个字节长度都是8位,每次传输中字节的数量是没有限制的。在起始条件后面的第一个字节是地址域,之后每个传输的字节后面都有一个应答(ACK)位。传输中串行数据的MSB(字节的高位)首先发送。
*应答信号
为了完成1个字节的传输操作,接收器应该在接收完1个字节之后发送ACK位到发送器,告诉发送器,已经收到了这个字节。ACK脉冲信号在SCL线上第9个时钟处发出(前面8个时钟完成1个字节的数据传输,SCL上的时钟都是由主器件产生的)。当发送器要接收ACK 脉冲时,应该释放SDA信号线,即将SDA置高。接收器在接收完前面8位数据后,将SDA 拉低。发送器探测到SDA为低,就认为接收器成功接收了前面的8位数据。
*I2C总线的数据传输过程
①开始:主设备产生启动信号,表明数据传输开始。
②地址:主设备发送地址信息,包含7位的从设备地址和1位的数据方向指示位(读或写位,表示数据流的方向)。
③数据:根据指示位,数据在主设备和从设备之间进行传输。数据一般以8位传输,最重要的位放在前面;具体能传输多少量的数据并没有限制。接收器产生1位的ACK(应答信号)表明收到了每个字节。传输过程可以被中止和重新开始。
④停止:主设备产生停止信号,结束数据传输。
第五章
一:串口的概念(串行接口)
常用的数据通信方式有并行通信和串行通信两种。当两台数字设备之间传输距离较远时,数据往往以串行方式传输。串行通信的数据是一位一位地进行传输的,在传输中每一位数据都占据一个固定的时间长度。与并行通信相比,如果n位并行接口传送n位数据需时间T,则串行传送的时间最少为nT。串行通信具有传输线少、成本低等优点,特别适合远距离传送。
①串行数据通信模式
串行数据通信模式有单工通信、半双工通信和全双工通信3种基本的通信模式。
●单工通信:数据仅能从设备A到设备B进行单一方向的传输。
●半双工通信:数据可以从设备A到设备B进行传输,也可以从设备B到设备A进行
传输,但不能在同一时刻进行双向传输。
●全双工通信:数据可以在同一时刻从设备A传输到设备B,或从设备B传输到设备A,即可以同时双向传输。
②串行通信方式
a. 异步通信方式
异步通信时数据是一帧一帧传送的,每帧数据包含有起始位(”0”)、数据位、奇偶校验位和停止位(”1”),每帧数据的传送靠起始位来同步。一帧数据的各位代码间的时间间隔是固定的,而相邻两帧的数据其时间间隔是不固定的。在异步通信的数据传送中,传输线上允许空字符。
异步通信对字符的格式、波特率、校验位有确定的要求。
●字符的格式
每个字符传送时,必须前面加一起始位,后面加上1、1.5或2位停止位。例如ASCII 码传送时,一帧数据的组成是:前面1个起始位,接着7位ASCII编码,再接着一位奇偶校验位,最后一位停止位,共10位。
●波特率
传送数据位的速率称为波特率,用位/秒(bit/s)来表示,称之为波特。例如,数据传送的速率为120字符/秒,每帧包括10个数据位,则传送波特率为:
10×120=1200b/s=1200波特
每一位的传送时间是波特的倒数,如1/1200=0.833ms。异步通信的波特率的数值通常为:150、300、600、1200、2400、4800、9600、14400、28800等,数值成倍数变化。
●校验位
在一个有8位的字节(byte)中,其中必有奇数个或偶数个的“1”状态位。对于偶校验就是要使字符加上校验位有偶数个“1”;奇校验就是要使字符加上校验位有奇数个“1”。例如数据“00010011”,共有奇数个“1”,所以当接收器要接收偶数个“1”时(即偶校验时),则校验位就置为“1”,反之,接收器要接收奇数个“1”时(即奇校验时),则校验位就置为“0”。
一般校验位的产生和检查是由串行通信控制器内部自动产生,除了加上校验位以外,通信控制器还自动加上停止位,用来指明欲传送字符的结束。停止位通常取1、1.5或2个位。对接收器而言,若未能检测到停止位则意味着传送过程发生了错误。
在异步通信方式中,在发送的数据中含有起始位和停止位这两个与实际需要传送的数据毫无相关的位。如果在传送1个8位的字符时,其校验位、起始位和停止位都为1个位,则相当于要传送11个位信号,传送效率只有约80%。
(2)同步通信方式
为了提高通信效率可以采用同步通信方式。同步传输采用字符块的方式,减少每一个字符的控制和错误检测数据位,因而可以具有较高的传输速率。
与异步方式不同的是,同步通信方式不仅在字符的本身之间是同步的,而且在字符与字符之间的时序仍然是同步的,即同步方式是将许多的字符聚集成一字符块后,在每块信息(常常称之为信息帧)之前要加上1~2个同步字符,字符块之后再加入适当的错误检测数据才传送出去。在同步通信时必须连续传输,不允许有间隙,在传输线上没有字符传输时,要发送专用的”空闲”字符或同步字符。
在同步方式中产生一种所谓“冗余”字符,防止错误传送。假设欲传送的数据位当作一被除数,而发送器本身产生一固定的除数,将前者除以后者所得的余数即为该“冗余”字符。当数据位和“冗余”字符位一起被传送到接收器时,接收器产生和发送器相同的除数,如此即可检查出数据在传送过程中是否发生了错误。统计数据表明采用”冗余”字符方法错误防
止率可达99%以上。
二:NAND FLASH与NOR FLASH异同.
答:不同:
1)NOR Flash把整个存储区分成若干个扇区(Sector),而NAND Flash把整个存储区
分成若干个块(Block),可以对以块或扇区为单位的内存单元进行擦写和再编程。
2)NAND Flash执行擦除操作是十分简单的,而NOR型内存则要求在进行擦除前先
要将目标块内所有的位都写为0。由于擦除NOR Flash时是以64~128KB为单位的块进行的,
执行一个写入/擦除操作的时间为5s,与此相反,擦除NAND Flash是以8~32KB的块进行
的,执行相同的操作最多只需要4ms。
3)NOR Flash的读速度比NAND Flash稍快一些,NAND Flash的写入速度比NOR Flash 快很多。NAND Flash的随机读取能力差,适合大量数据的连续读取。
4)NOR Flash容量通常在1 MB~8MB之间。而NAND Flash用在8MB以上的产品当
中。NOR Flash主要应用在代码存储介质中,NAND Flash适用于资料存储。
5)在NOR Flash上运行代码不需要任何的软件支持。在NAND Flash上进行同样操作
时,通常需要驱动程序,也就是内存技术驱动程序(MTD )。NAND Flash和NOR Flash在进
行写入和擦除操作时都需要MTD。
6)在NAND Flash中每个块的最大擦写次数是一百万次,而NOR Flash的擦写次数是
十万次。
区别:两者工艺不一样,NOR读取速度快,成本高,容量不易做大,NAND读取慢,
成本低,容量很容易作大。
相同点:都是采用FLASH技术生产
功能:NOR适合作为芯片程序存储的ROM使用,NAND适合作为非易失性数据存储器
第八章
一:Linux的最常用的命令
答:1)adduser 示例:创建pdr帐户 adduser pdr
2)cat 示例:
cat text 在屏幕上显示文件text的内容;
cat -n textfile1 > textfile2 把 textfile1 的文件内容加上行号后输入
textfile2 这个文件里;
3)cd 示例:假设用户当前目录是 /home/xu 现需要更换到/home/xu/pro 目录中
$ cd pro
4) cp 示例:
$ cp - r /usr/xu/ /usr/liu/ 表示将/usr/xu 目录中的所有文件及其子
目录拷贝到目录 /usr/liu中。
5)export 示例:显示当前所有环境变量的设置情况 #export
6)Fdisk 示例:查看当前系统中磁盘的分区状况,包括硬盘、U盘等fdisk -l
7)Ln:类似windows下的快捷方式
示例:要为当前目录下的file文件建立一个硬链接,名为
/home/lbt/doc/file/, 可用如下命令: ln file /home/lbt/doc/file
8)locate 示例:locate filename: 寻找系统中所有叫filename的文件
9)Ls 示例:将 /bin 目录以下所有目录及文件详细资料列出 : ls -lR /bin
10) minicom 示例:开启minicom的配置界面 minicom –s
11)Mkdir 示例:在当前目录中创建嵌套的目录层次inin 和inin下的mail目录
权限设置为只有文件拥有者有读、写和执行权限。mkdir -p -m 700 ./inin/mail/
12)Mount 示例:挂载ntfs格式的hda7分区到/mnt/cdrom文件夹mount -o iocharset=cp936 /dev/hda7 /mnt/cdrom
13)mv 示例:$ mv /usr/xu/ * . 表示将/usr/xu 中的所有文件移到当前目录用 .
表示
14)Passwd:passwd 作为普通用户和超级权限用户都可以运行,但作为普通用户只能
更改自己的用户密码,但前提是没有被root用户锁定;如果root用户运
行passwd ,可以设置或修改任何用户的密码;passwd 命令后面不接任何参数或用户名,
则表示修改当前用户的密码
示例:passwd pengdr
15)ping 示例:ping https://www.360docs.net/doc/36308669.html,
16)pwd:查看”当前工作目录“的完整路径示例:
[root@localhost ~]# pwd
/root
17)reboot:执行reboot指令可让系统停止运作,并重新开机。
示例:做个重开机的模拟(只有纪录并不会真的重开机)。reboot –w
18) rmdir
示例:在工作目录下的 BBB 目录中,删除名为 Test 的子目录。若 Test 删
除后,BBB 目录成为空目录,则 BBB 亦予删除。
rmdir -p BBB/Tes [root@localhost ~]#
19)setup 功能说明:设置程序,类似windows控制面板语法:setup
20) su功能说明:变更用户身份。示例:变更账号为超级用户,并在执行df命令后
还原使用者。su -c df root
21)tar 功能说明:备份或解压文件。示例:压缩目录/etc为tar.gz后缀。 # tar cvf
backup.tar /etc 解压#tar –zxvf file.tar.gz
#tar –jxvf file.tar.bz2
22) umount 功能:卸除文件系统。示例:卸载 /mnt区: umount /mnt/cdrom
23)whereis 功能:查询某个二进制命令文件、帮助文件等所在目录. 比如:查找“ls”
这个二进制命令文件所在的目录 whereis ls
第九章
一:ADS编译环境的设置
二:系统启动代码bootloader概念
在嵌入式系统中,通常没有像BIOS那样的固件程序,因此整个系统的加载启动任务就完全由BootLoader来完成。
比如在一个基于 ARM7TDMI core的嵌入式系统中,系统在上电或复位时都从地址 0x00000000开始执行。而在这个地址处安排的通常就是系统的BootLoader程序。
BootLoader就是在操作系统运行之前运行的一段小程序。通过它可以初始化硬件设备,从而将系统的软硬件环境设置到一个合适的状态,以便为最终调用操作系统做好准备。
Bootloader是在嵌入式系统内核运行之前运行的一段引导加载程序。
作用:将内核映像从硬盘上读到RAM中,然后跳转到内核的入口点去运行,即开始启动操作系统。
嵌入式系统常见的Bootloader有vivi和U-Boot,RedBoot
题目一:简述Bootloader启动过程。
1、第一阶段
(1)、基本的硬件设备初始化
(2)、为阶段2代码准备RAM空间
(3)、拷贝阶段2代码到RAM空间
(4)、设置好堆栈
(5)、跳转到阶段2的C程序入口点
2、第二阶段
(1)、初始化本阶段要使用到的硬件
(2)、检测系统内存映射(memory map)
(3)、将kernel和根文件系统映像从flash读到RAM空间
(4)、为kernel设置启动参数
(5)、调用内核
题目二:请简述嵌入式软件Bootloader的两种工作模式。
启动加载模式:启动加载模式称为“自举”(Autonomous)模式。即Bootloader从目标机上的某个固态存储设备上将操作系统加载到 RAM 中运行,整个过程并没有用户的介入。启动加载模式是 Bootloader的正常工作模式,在嵌入式产品发布的时侯,Bootloader必须工作在这种模式下。
下载模式:在这种模式下,目标机上的Bootloader将通过串口连接或网络连接等通信手段从主机下载文件。下载内容及存储:主要是下载内核映像和根文件系统映像等。从主机下载的文件通常首先被Bootloader保存到目标机的RAM中,然后再被 Bootloader写到目标机上的FLASH 类固态存储设备中
三:Makefile文件的用途与写法
1.用途:makefile关系到了整个工程的编译规则。一个工程中的源文件不计数,其按类型、功能、模块分别放在若干个目录中,makefile定义了一系列的规则来指定,哪些文件需要先编译,哪些文件需要后编译,哪些文件需要重新编译,甚至于进行更复杂的功能操作,因为makefile就像一个Shell脚本一样,其中也可以执行操作系统的命令。
2.写法:
1)需要由make工具创建的目标体(target),通常是目标文件右可执行文件;
2)要创建的目标体所依赖的文件(dependency_file);
3)创建每个目标体进需要运行的命令(command)
格式:target:dependency_files
command
例如,有两个文件分别为hello.c和hello.h,创建的目标体为hello.o,执行的命令为gcc编译指令:gcc –c hello.c,那么,对应的Makefile就可以写为:#The simplest example
hello.o:hello.c hello.h
gcc –c hello.c –o hello.o
接着就可以make了。使用make的格式为:#make target,这样make就会自动读入Makefile(也可以是首写字母小写makefile)并执行对应target的commank语句,并会找到相应的依赖文件。如下所示:
[root @localhost makefile] # make hello.o
Gcc –c hello.c –o hello.o
[root @localhost makefile] # ls
Hello,c hello.h hello.o Makefile
可以看到,Makefile执行了”hello.o”对应的命令语句,并生成了”hello.o”的目标体.
附:makefile的自动变量:
$* 不包括扩展名的目标文件名称
$+ 所以的依赖文件,以空格分开,并以出现的先后为序,可能包含重复的依赖文件$< 第一个依赖文件
$? 所以时间戳比目标文件晚的依赖文件,并以空格分开
$@ 目标文件的完整名称
$^ 所有不重复的依赖文件,以空格分开
$% 如果目标是归档成员,则该变量表示目标的归档成员名称
题目一:Makefile和Make各实现什么功能?
Makefile文件内容按照规则,对系统中本目录下的文件(.c、.s、.o、.h、.lib 等)根据相互关系和要求进行组织,设定各自的编译方法,指定所生成的目标。 Makefile 是一种文本格式文件。
Make是Makefile文件的解释器
Make对Makefile文件解释后,生成Linux的shell命令和gcc编译命令,接着对命令执行,最终生成目标文件。
Makefile是工程系统编译批处理文件。
第十章
一:嵌入式编译环境的概念、建立方法以及步骤
第十一章
一:Linux驱动设备的分类与常用的数据结构
1.Linux系统设备分为三类:字符设备、块设备和网络设备
2.数据结构:
用户应用程序调用设备的功能都是在设备驱动程序中定义的,也就是设备驱动程序中所定义的功能入口点函数(或称为功能接口函数)。这些设备的功能接口函数都被定义在
struct file_operations{ };
struct inode{ };
struct file{ };
二:内核驱动代码的书写规则
(完整版)单片机知识点总结
单片机考点总结 1.单片机由CPU、存储器及各种I/O接口三部分组成。 2.单片机即单片微型计算机,又可称为微控制器和嵌入式控制器。 3.MCS-51系列单片机为8位单片机,共40个引脚,MCS-51基本类型有8031、8051 和8751. (1)I/O引脚 (2)8031、8051和8751的区别: 8031片内无程序存储器、8051片内有4KB程序存储器ROM、8751片内有4KB程序存储器EPROM。 (3)
4.MCS-51单片机共有16位地址总线,P2口作为高8位地址输出口,P0口可分时复用 为低8位地址输出口和数据口。MCS-51单片机片外可扩展存储最大容量为216=64KB,地址范围为0000H—FFFFH。(1.以P0口作为低8位地址/数据总线;2. 以P2口作为高8位地址线) 5.MCS-51片内有128字节数据存储器(RAM),21个特殊功能寄存器(SFR)。(1)MCS-51片内有128字节数据存储器(RAM),字节地址为00H—7FH; 00H—1FH: 工作寄存器区; 00H—1FH: 可位寻址区; 00H—1FH: 用户RAM区。 (2)21个特殊功能寄存器(SFR)(21页—23页);
(3)当MCS-51上电复位后,片内各寄存器的状态,见34页表2-6。 PC=0000H, DPTR=0000H, Acc=00H, PSW=00H, B=00H, SP=07H, TMOD=00H, TCON=00H, TH0=00H, TL0=00H, TH1=00H, TL1=00H, SCON=00H, P0~P3=FFH 6. 程序计数器PC:存放着下一条要执行指令在程序存储器中的地址,即当前PC值或现行值。程序计数器PC是16位寄存器,没有地址,不是SFR. 7. PC与DPTR的区别:PC和DPTR都用于提供地址,其中PC为访问程序存储器提供地址,而DPTR为访问数据存储器提供地址。 8. MCS-51内部有2个16位定时/计数器T0、T1,1个16位数据指针寄存器DPTR,其中MOVE DPTR, #data16 是唯一的16位数据传送指令,用来设置地址指针DPTR。(46页) 定时/计数器T0和T1各由2个独立的8位寄存器组成,共有4个独立寄存器:TH1、TL1、TH0、TL0,可以分别对对这4个寄存器进行字节寻址,但不能吧T0或T1当作1个16位寄存器来寻址。即:MOV T0,#data16 ;MOV T1,#data16 都是错的,MOV TH0,#data;MOV TL0,,#data是正确的。 9.程序状态字寄存器PSW(16页) (1)PSW的格式: D7 D6 D5 D4 D3 D2 D1 D0 PSW D0H (2)PSW寄存器中各位的含义; Cy:进位标志位,也可以写为C。 Ac:辅助进位标志位。
嵌入式学习心得体会5篇
嵌入式学习心得体会5篇 嵌入式学习心得体会(一) 首先我声明,我是基于嵌入式系统平台级设计的,硬件这个方向我相对来讲比较有发言权,如果是其它方面所要具备的基本技能还要和我们培训中心其它专业级讲师沟通。他们的方面上我只能说是知道些,但不是太多,初级的问题也可以问我。 对于硬件来讲有几个方向,就单纯信号来分为数字和模拟,模拟比较难搞,一般需要很长的经验积累,单单一个阻值或容值的精度不够就可能使信号偏差很大。因此年轻人搞的较少,随着技术的发展,出现了模拟电路数字化,比如手机的modem 射频模块,都采用成熟的套片,而当年国际上只有两家公司有此技术,自我感觉模拟功能不太强的人,不太适合搞这个,如果真能搞定到手机的射频模块,只要达到一般程度可能月薪都在15k以上。 另一类就是数字部分了,在大方向上又可分为51/arm的单片机类,dsp类,fpga 类,国内fpga的工程师大多是在ic设计公司从事ip核的前端验证,这部分不搞到门级,前途不太明朗,即使做个ic前端验证工程师,也要搞上几年才能胜任。dsp 硬件接口比较定型,如果不向驱动或是算法上靠拢,前途也不会太大。 而arm单片机类的内容就较多,业界产品占用量大,应用人群广,因此就业空间极大,而硬件设计最体现水平和水准的就是接口设计这块,这是各个高级硬件工程师相互pk,判定水平高低的依据。而接口设计这块最关键的是看时序,而不是简单的连接,比如pxa255处理器i2c要求速度在100kbps,如果把一个i2c外围器件,最高还达不到100kbps的与它相接,必然要导致设计的失败。这样的情况有很多,比如51单片机可以在总线接lcd,但为什么这种lcd就不能挂在arm的总线上,还有arm7总线上可以外接个winband的sd卡控制器,但为什么这种控制器接不到arm9或是xscale处理器上,这些都是问题。 因此接口并不是一种简单的连接,要看时序,要看参数。一个优秀的硬件工程师应该能够在没有参考方案的前提下设计出一个在成本和性能上更加优秀的产品,靠现有的方案,也要进行适当的可行性裁剪,但不是胡乱的来,我遇到一个工程师
嵌入式知识点整理
第一章 一:嵌入式系统基础知识 第二章 一:CM3 1.Cortex-M3 是一个32 位处理器内核。内部的数据路径是32 位的,寄存器是32 位的,存储器接口也是32 位的。CM3 采用了哈佛结构,拥有独立的指令总线和数据总线。 2.程序计数寄存器 R15 :程序计数寄存器,指向当前程序地址。 3.特殊功能寄存器 (1)程序状态字寄存器组(PSRs)记录ALU 标志(0 标志,进位标志,负数标志,溢出标志),执行状态,以及当前正服务的中断号; (2)中断屏蔽寄存器组:PRIMASK 失能所有的中断、FAULTMASK 失能所有的fault、BASEPRI 失能所有优先级不高于某个具体数值的中断; (3)控制寄存器(CONTROL ),定义特权状态(见后续章节对特权的叙述),并且决定使用哪一个堆栈指针; 4.Cortex-M3 处理器支持两种处理器的操作模式,还支持两级特权
操作。 两种操作模式:(1)处理者模式(handler mode) 异常服务例程的代码—包括中断服务(2)线程模式(thread mode)普通应用程序的代码; 两级特权:特权级和用户级,提供一种存储器访问保护机制,使得普通用户程序代码不能意外地,甚至是恶意地执行涉及到要害的操作。 复位后,处理器默认进入线程模式,特权级访问; a.在 CM3 运行主应用程序时(线程模式),既可以使用特权级, 也可 以使用用户级;但是异常服务例程必须在特权级下执行; b.在特权级下,程序可以访问所有范围的存储器,并且可以执行所 有指 令,包括切换到用户级; c.从用户级到特权级的唯一途径就是异常,用户级的程序必须执行 一条系统调用指令(SVC)触发 SVC 异常,然后由异常服务例程接管,如果批准了进入,则异常服务例程修改 CONTROL 寄存器,才能在用户级的线程模式下重新进入特权级; 5.异常以及异常类型 异常:在 ARM 编程领域中,凡是打断程序顺序执行的事件,都被称为异常(exception) 。包括:外部中断、不可屏蔽中断、指令执行了“非法操作”或者访问被禁的内存区间产生的各种错误 fault。
嵌入式系统学习心得总结
嵌入式系统学习心得总结 射频模块,都采纳成熟的套片,而昔时国内上只要两家公司有此技能,自我觉得模仿功用没有太强的人,没有太合适搞这个,假如真能搞定得手机的射频模块,只需到达普通水平能够月薪都正在15K以上。 另外一类便是数字局部了,正在小气向上又可分为51/ARM的单片机类,DSP类,FPGA类,国际FPGA的工程师年夜可能是正在IC计划公司处置IP核的前端考证,这局部没有搞到门级,出路没有太阴暗,即便做个IC前端考证工程师,也要搞上多少年才干胜任。DSP 硬件接口比拟定型,假如没有向驱动或者是算法上挨近,出路也没有会太年夜。而ARM单片机类的内收留就较多,业界产物占用量年夜,使用人群广,因而失业空间极年夜,而硬件计划最表现程度以及水准的便是接口计划这块,这是各个初级硬件工程师互相PK,断定程度上下的根据。而接口计划这块最关头的是看时序,而没有是复杂的衔接,比方PXA255处置器I2C请求速率正在100Kbps,假如把一个I2C 核心器件,最高还达没有到100kbps的与它相接,必定要招致计划的失利。如许的状况有良多,比方51单片机能够正在总线接LCD,但为何这类LCD就不克不及挂正在ARM的总线上,另有ARM7总线上能够外接个Winband的SD卡把持器,但为何这类把持器接没有到ARM9或者是Xscale处置器上,这些都是成绩。因而接口并非一种复杂的衔接,要看时序,要看参数。一个良好的硬件工程师该当可以正在不参考计划的条件下计划出一个正在本钱以及功能上愈加良好的产
物,靠现有的计划,也要停止得当的可行性裁剪,但没有是胡乱的来,我碰到一个工程师把计划中的5V变1.8V的DC芯片,间接改换成LDO,偶然就会把CPU烧上多少个。头几天另有人但愿我帮助把他们从前基于PXA255平台的手持GPS设置装备摆设做下顺序优化,我问了一上情况,舆图是存正在SD卡中的,而SD卡与PXA255的MMC把持器间采纳的SPI接口,因而招致舆图读取速率非常的慢,这类状况是计划中严峻的缺点,而没有是顺序的成绩,因而我提了多少条倡议,让他们更新试下再说。因而想成为一个良好的工程师,需求对于零碎全体性的掌握以及对于已经有电路的了解,换句话说,给你一套电路图你毕竟能看理解理睬几多,看没有理解理睬80%以上的话,阐明你离良好的工程师还差患上远哪。其次是电路的调试才能以及审图才能,但最最根本的才能仍是道理图计划PCB绘制,逻辑计划这块。这是指的硬件计划工程师,从下面的硬件计划工程师中还能够分出ECAD 工程师,便是业余的画PCB板的工程师,以及EMC计划工程师,帮人家处理EMC的成绩。硬件工程师再往上便是板级测试工程师,便是C 语功底很好的硬件工程师,正在电路板调试进程中能经过自已经编写的测试顺序对于硬件功用停止考证。而后再交给基于操纵零碎级的驱动开辟职员。 总之,硬件的内收留良多很杂,硬件那方面练成为了城市成为一个妙手,我经常会给人家做下计划评价,良多初级硬件工程师计划的工具,常常被我一句话否认,因而工程师做到我这类境地,也会获咎些人,但硬件确实会有良多鲜为人知的工具,让良多初级硬件工程师
嵌入式实验报告心得
嵌入式实验报告心得 篇一:嵌入式系统原理实验总结报告 嵌入式系统原理实验总结报告 车辆座椅控制系统实验 XX/5/23 嵌入式系统原理实验总结报告 一、技术性总结报告 (一)题目:车辆座椅控制系统实验(二)项目概述: 1.为了实现车辆座椅控制的自动化与智能化。 2.方便用户通过智能手机与车载传感器之间的联动。 3.使车辆作为当今物联网中重要的一个节点发挥作用。 4.通过车辆座椅控制系统实验实现对嵌入式系统原理课程的熟练掌握与对嵌入式系统原理知识的深化记忆。 5. 加强本组学生对嵌入式系统原理的更深层次的理解与运用。 (三)技术方案及原理 本次试验分为软件、硬件两个部分。 1.软件部分。 A.智能手机部分,包括通过智能手机对座椅的控制部分、手机所携带的身份信息部分。 本部分软件使用Java编写,其程序部分为:主程序:package ;
import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ;import ; import ; import ; public class MainActivity extends ActionBarActivity { private Button Up = null; private Button Left = null; private Button Dowm = null; private Button Right = null; private Socket socket = null; private static final String HOST = "";private static final int PORT = 10007; public void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); setContentView(; initControl();} private void initControl() {
嵌入式系统原理与应用复习知识点总结
第一章 1、嵌入式系统的应用范围:军事国防、消费电子、信息家电、网络通信、工业 控制。 2、嵌入式系统定义:嵌入式系统是以应用为中心,以计算机技术为基础,软件 与硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专 用计算机系统。(嵌入式的三要素:嵌入型、专用性与计算机系统)。 3、嵌入式系统的特点:1)专用性强;2)实时约束;3)RTOS;4)高可靠性;5) 低功耗;6)专用的开发工具和开发环境;7)系统精简; 4、嵌入式系统的组成: (1)处理器:MCU、MPU、DSP、SOC; (2)外围接口及设备:存储器、通信接口、I/O 接口、输入输出设备、电源等;(3)嵌入式操作系统:windows CE、UCLinux、Vxworks、UC/OS; (4)应用软件:Bootloader 5、嵌入式系统的硬件:嵌入式微处理器(MCU、MPU、DSP、SOC),外围电路, 外部设备; 嵌入式系统的软件:无操作系统(NOSES),小型操作系统软件(SOSE)S,大型 操作系统软件(LOSES)注:ARM 处理器三大部件:ALU、控制器、寄存器。 6、嵌入式处理器特点:(1)实时多任务;(2)结构可扩展;(3)很强的存储区 保护功能;(4)低功耗; 7、DSP处理器两种工作方式:(1)经过单片机的DSP可单独构成处理器;(2) 作为协处理器,具有单片机功能和数字处理功能; 第二章 1、IP核分类:软核、固核、硬核; 2、ARM 处理器系列:(1)ARM7系列(三级流水,thumb 指令集,ARM7TDMI); (2)ARM9系列(DSP处理能力,ARM920T)(3)ARM/OE(增强DSP)(4)SecurCone 系列(提供解密安全方案);(5)StrongARM系列(Zntle 产权);(6)XScale系列(Intel 产权);(7)Cortex 系列(A:性能密集型;R:要求实时性;M:要求低 成本) 3、ARM 系列的变量后缀:(1)T:thumb 指令集;(2)D:JTAG调试器;(3)快
嵌入式实习报告总结
嵌入式实习报告总结 随着信息化技术的发展和数字化产品的普及,以计算机技 术、芯片技术和软件技术为核心的嵌入式系统再度成为当前研究和应用的热点,通信、计算机、消费电子技术(3C)合一的趋势正在逐步形成,无所不在的网络和无所不在的计算( , )正在将人类带入一个崭新的信息社会。 二、实习目的 学习和了解了嵌入式在生活中的重要作用和发展过程,熟练掌握硬件体系结构,熟悉下的嵌入式编程流程,积累自己的软件编写经验,能够参与并实现一个真实和完整的嵌入式项目,为今后的学习和将从事的技术工作打下坚实的基础 三、实习任务 第一阶段操作和编程基础 主要介绍的基本命令和基础编程知识,包括 的文件操作和目录操作命令,编辑器,编译器,调试器和项目管理工具等知识。 第二阶段嵌入式C语言编程基础 主要介绍在嵌入式开发编程中C语言的重要概念和编程技巧中的重点难点,以复习串讲和实例分析的形式,重点介绍包括函数与程序结构,指针、数组和链表,库函数的使用等知识。
第三阶段上C强化编程训练 主要包括整数算法训练,递归和栈编程训练,位操作训练,指针训练,字符串训练和常用C库函数编程接口实践,强化学员对下基本编程开发的理解和编码调试的能力。 第四阶段环境高级编程及项目开发编程实践 主要包括系统编程(信号/系统调用/管道消息队列/共享内存等),文件编程(文件描述符/文件读写接口/原子操作/阻塞与非阻塞等,多任务和多线程编程(进程标识/ 用户标识与多线程概念/线程同步等),网络编程(网络基本概念/套接口编程/网络字节次序结构编程);掌握下编程的开发流程,熟悉网络编程的调用接口函数和相关数据结构,使学员初步具备在上进行系统编程开发的能力。同时综合之前所学内容和编程技术,以小组为单位进行一个团队合作项目的开发,考核内容包括文件编程,多线程编程,网络编程和项目文档编写。 第五阶段嵌入式处理器体系结构及编程实践 主要介绍体系结构及其基本编程知识,包括指令分类,寻址方式、指令集、存储系统、异常中断处理、汇编语言以及C\和汇编语言的混合编程等知识。同时结合嵌入式开发板硬件设计原理和基本硬件设计流程,分析各种外设的工作原理和驱动机制,并自己动手实践完成一个开发板上的编程大作业。
嵌入式心得体会
对于电焊,虽然一点都不陌生,但亲手操作的机会却只有几次,因此我很庆幸能够有这样的焊接机会,进行这样的实践。 焊接看似容易,实则需要长时间练习才能掌握。刚开始的时候,手一直在抖,尤其这次焊的还是贴片电容、电阻,原器件比以前焊的小好多,用镊子的手一抖就夹不住了,拿着烙铁的手抖得都不容易将器件焊上,焊出来的焊点也特别难看,在不断尝试,不断挑战自我的过程中,我的手不抖了,也基本能掌握锡的用量了,当焊点终于不再“丑不忍睹”的时候,对焊接也没有当初的恐惧了。对自己的动手能力也有了信心。 在焊接的过程中我学到了许多以前我不知道的东西,比如,以前我只知道有电烙铁,但不知道它还有好多种类,有单用式、两用式、调温式、恒温式、直热式、感应式、内热式和外热式。松香可以将多余的锡弄下来,用酒精可以把板擦的干净些。通过视频和查找资料,知道了在焊不同的器件时用的电烙铁的头不同,比如在焊引脚时要用尖头,焊CPU时要用刀口,为防止锡将焊引脚的小孔堵住,用松香把纸条粘在小孔上,把小孔盖住,把CPU的引脚对齐,用锡先涂满两边,固定好芯片,在焊另外两边,然后用尖头的电烙铁沾着松香将多余的锡弄下来。 本次课程设计的是信号发生器,信号发生器在EDA课程,数字信号处理课程中都曾涉及,所以还是较为熟悉的,在设计之前查阅了一些相关书籍,也从网上查找了一些相关资料,程序代码中运用到了C语言,将程序加入到嵌入式结构框架中,进行定义变量,端口,设定所用的GPIO参数等等。 在焊接的过程中我不仅学到了知识,而且让我深深地体会到一个团队中各成员合作的重要性,要善于团队合作,在进行团队合作的时候,还要耐心听取每个成员的意见,每个人都有长处和短处,只有在包容别人的同时我们才可以取长补短,不断完善和不断进步,交到更多的朋友,学到更多的知识。同时还让我明白:做任何事都要一心一意,严谨认真,反复琢磨,不能畏惧,要有信心和勇气,一定要做好充分的准备。不能盲目去做,要坚持,还要学会反思跟总结,我们不是为了完成任务而完成,这还是一个学习跟提高的过程。 在大学里学的不是知识,而是一种叫做自学的能力。在这个知识爆炸的时代,知识更新太快,靠原有的一点知识肯定不行。以后的工作中肯定会用到一些新的
CORTEX-M4知识点总结
Cortex-M4内核知识点总结 余 明
目录 Cortex-M4内核知识点总结 (1) 1 ARM处理器简介 (4) 2 架构 (5) 2.1架构简介 (5) 2.2编程模型 (5) 2.3存储器系统 (8) 2.4复位和复位流程 (12) 3 指令集 (14) 3.1 CM4指令集特点 (14) 3.2 Cortex-M处理器间的指令集比较 (14) 3.3 汇编指令简要介绍 (14) 3.3.1 处理器内传送数据 (14) 3.3.2 存储器访问指令 (15) 3.3.3 算数运算 (16) 3.3.4 逻辑运算 (17) 3.3.5 移位 (17) 3.3.6 异常相关指令 (17) 4 存储器系统 (18) 4.1 存储器外设 (18) 4.2 Bootloader (18) 4.3位段操作 (19) 4.4 存储器大小端 (19) 5 异常和中断 (21) 5.1 中断简介 (21) 5.2异常类型 (21) 5.3 中断管理 (22) 5.4 异常或中断屏蔽寄存器 (23) 5.4.1 PRIMASK (23)
5.4.2 FAULMASK (M0中无) (23) 5.4.3 BASEPRI(M0中无) (23) 5.5 中断状态及中断行为 (23) 5.5.1 中断状态 (23) 5.5.2 中断行为 (24) 5.6 各Cortex-M处理器NVIC差异 (26) 6 异常处理 (28) 6.1 C实现的异常处理 (28) 6.2 栈帧 (28) 6.3 EXC_RETURN (29) 6.4异常流程 (30) 6.4.1 异常进入和压栈 (30) 6.4.2 异常返回和出栈 (31) 7 低功耗和系统控制特性 (32) 7.1 低功耗模式 (32) 7.1 SysTick定时器 (32) 8 OS支持特性 (34) 8.1 OS支持特性简介 (34) 8.2 SVC和PendSV (34) 8.3 实际的上下文切换 (35)
嵌入式系统基础知识总结.doc
嵌入式系统基础知识总结 本文主要介绍嵌入式系统的一些基础知识,希望对各位有帮助。 嵌入式系统基础 1、嵌入式系统的定义 (1)定义:以应用为中心,以计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。 (2)嵌入式系统发展的4个阶段:无操作系统阶段、简单操作系统阶段、实时操作系统阶段、面向Internet阶段。 (3)知识产权核(IP核):具有知识产权的、功能具体、接口规范、可在多个集成电路设计中重复使用的功能模块,是实现系统芯片(SOC)的基本构件。 (4)IP核模块有行为、结构和物理3级不同程度的设计,对应描述功能行为的不同可以分为三类:软核、固核、硬核。 2、嵌入式系统的组成 包含:硬件层、中间层、系统软件层和应用软件层 (1)硬件层:嵌入式微处理器、存储器、通用设备接 口和I/O接口。
嵌入式核心模块=微处理器+电源电路+时钟电路+ 存储器 Cache:位于主存和嵌入式微处理器内核之间,存放的是最近一段时间微处理器使用最多的程序代码和数据。它的主要目标是减小存储器给微处理器内核造成的存储器访问瓶颈,使处理速度更快。 (2)中间层(也称为硬件抽象层HAL或者板级支持包BSP). 它将系统上层软件和底层硬件分离开来,使系统上层软件开发人员无需关系底层硬件的具体情况,根据BSP层提供的接口开发即可。 BSP有两个特点:硬件相关性和操作系统相关性。 设计一个完整的BSP需要完成两部分工作: A、嵌入式系统的硬件初始化和BSP功能。 片级初始化:纯硬件的初始化过程,把嵌入式微处理器从上电的默认状态逐步设置成系统所要求的工作状态。 板级初始化:包含软硬件两部分在内的初始化过程,为随后的系统初始化和应用程序建立硬件和软件的运行环境。 系统级初始化:以软件为主的初始化过程,进行操作系统的初始化。 B、设计硬件相关的设备驱动。
(完整word版)计算机三级嵌入式知识点(2),推荐文档
计算机三级嵌入式考试知识点整理 (计算机三级嵌入式考试只考选择题和填空题) 1.嵌入式系统的设计的三个阶段之一:1. 设计 2.实现 3.测试 2.RISC架构的ARM微处理器的一般特点:1. 体积小、低功耗 2.大量使用寄 存器3. 寻址方式灵活简 3.通常所讲的交叉编译就是在X86架构的宿主机上生成适用于ARM架构的格式 (elf)的可执行代码 4.Boot Loader阶段1所完成的步骤的是:1. 硬件设备初始化 2. 拷贝 Boot Loader的阶段2到RAM空间中3. 设置堆栈 5.ARM的7种运行状态之一:1. 快中断状态2. 中断状态3. 无定义状态4.管 理状态5.快速中断状态6.系统状态7.用户状态 6.命令可以把server的/tmp mount到client的/mnt/tmp并且是: mount-o ro server:/tmp/mnt/tmp 7.哪个GUI是由中国人主持的一个自由软件项目:MinuGUI 8.嵌入式图形用户接口(GUI)的主要特点:1. 运行时占用的系统资源少 2.模 块化结构,便于移植和定制3.可靠性高 9.RISC指令系统特点的是:1. 指令长度固定,指令种类少2.设置大量通用 寄存,访问存储器指令简单3. 选取使用频率较高的一些简单指令 10.通常所说的32位微处理器是指CPU字长为32位 11.在嵌入式软件交叉调试过程中,宿主机与目标机之间的连接与通信方式有:1. 串口2.并口3.网络4.JTAG 12.ADD R0,R1,[R2]属于寄存器间接寻址 13.ADD R0,R0,#1属于立即寻址 14.数据字越长则精度越高 15.典型的计算机系统结构是冯诺依曼体系结构 16.将传统的计算机系统芯片化,是嵌入式系统诞生后的∑发展模式发展模式 17.RISC指令系统特点的是:1. 大量使用寄存器2.采用固定长度指令格式3. 使用单周期指令4.寻址方式多 18.与通用操作系统相比嵌入式操作系统还必须具有的特点是:1. 强稳定性, 弱交互性2. 较强实时性 19.嵌入式系统产品:1. PDA 2.ATM机 3. 机顶盒 20.开源的嵌入式操作系统的是嵌入式linux 21.虚拟文件系统的是vfs 22.嵌入式系统通常执行特定功能 23.在嵌入式产品需求分析阶段完成的任务是操作系统和硬件选型 24.ARM处理器异常工作模式的是1. 快速中断模式2. 未定义模式 3. 数据访问 终止模式 25..嵌入式软件开发与通用软件开发增加了代码固化环节 26.嵌入式系统调试方式中不占用系统资源的调试方式是ICE在线仿真器 27.ARM汇编程序中实现程序跳转的方式使用跳转指令 28.ADD R0,R1,[R2]中的第二操作数属于寄存器间接寻址方式 29.烧写到FLASH里的是.bin格式的文件 二、填空题 1.ARM内核有(T)(D)(M)(I)四个功能模块。
java各知识点详细总结(毕向东笔记整理)
Java基础知识总结 写代码: 1,明确需求。我要做什么? 2,分析思路。我要怎么做?1,2,3。 3,确定步骤。每一个思路部分用到哪些语句,方法,和对象。 4,代码实现。用具体的java语言代码把思路体现出来。 学习新技术的四点: 1,该技术是什么? 2,该技术有什么特点(使用注意): 3,该技术怎么使用。demo 4,该技术什么时候用?test。 ----------------------------------------------------------------------------------------------- 一:java概述: 1991 年Sun公司的James Gosling等人开始开发名称为 Oak 的语言,希望用于控制嵌入在有线电视交换盒、PDA等的微处理器; 1994年将Oak语言更名为Java; Java的三种技术架构: JAVAEE:Java Platform Enterprise Edition,开发企业环境下的应用程序,主要针对web程序开发; JAVASE:Java Platform Standard Edition,完成桌面应用程序的开发,是其它两者的基础; JAVAME:Java Platform Micro Edition,开发电子消费产品和嵌入式设备,如手机中的程序; 1,JDK:Java Development Kit,java的开发和运行环境,java的开发工具和jre。 2,JRE:Java Runtime Environment,java程序的运行环境,java运行的所需的类库+JVM(java 虚拟机)。 3,配置环境变量:让java jdk\bin目录下的工具,可以在任意目录下运行,原因是,将该工具所在目录告诉了系统,当使用该工具时,由系统帮我们去找指定的目录。 环境变量的配置: 1):永久配置方式:JAVA_HOME=%安装路径%\Java\jdk path=%JAVA_HOME%\bin 2):临时配置方式:set path=%path%;C:\Program Files\Java\jdk\bin 特点:系统默认先去当前路径下找要执行的程序,如果没有,再去path中设置的路径下找。 classpath的配置: 1):永久配置方式:classpath=.;c:\;e:\ 2):临时配置方式:set classpath=.;c:\;e:\ 注意:在定义classpath环境变量时,需要注意的情况 如果没有定义环境变量classpath,java启动jvm后,会在当前目录下查找要运行的类文件; 如果指定了classpath,那么会在指定的目录下查找要运行的类文件。 还会在当前目录找吗?两种情况: 1):如果classpath的值结尾处有分号,在具体路径中没有找到运行的类,会默认在当前目录再找一次。 2):如果classpath的值结果出没有分号,在具体的路径中没有找到运行的类,不会再当前目
嵌入式系统学习心得总结范文
嵌入式系统学习心得总结范文 嵌入式系统学习心得总结范文嵌入式系统学习心得总结 首先我声明,我是基于嵌入式系统平台级设计的,硬件这个方向我相对来讲比较有发言权,如果是其它方面所要具备的基本技能还要和我们培训中心其它专业级讲师沟通。他们的方面上我只能说是知道些,但不是太多,初级的问题也可以问我。 对于硬件来讲有几个方向,就单纯信号来分为数字和模拟,模拟比较难搞,一般需要很长的经验积累,单单一个阻值或容值的精度不够就可能使信号偏差很大。因此年轻人搞的较少,随着技术的发展,出现了模拟电路数字化,比如手机的ode射频模块,都采用成熟的套片,而当年国际上只有两家公司有此技术,自我感觉模拟功能不太强的人,不太适合搞这个,如果真能搞定到手机的射频模块,只要达到一般程度可能月薪都在15以上。 另一类就是数字部分了,在大方向上又可分为51/AR的单片机类,DSP类,FPGA类,国内FPGA的工程师大多是在IC设计公司从事IP核的前端验证,这部分不搞到门级,前途不太明朗,即使做个IC 前端验证工程师,也要搞上几年才能胜任。DSP硬件接口比较定型,如果不向驱动或是算法上靠拢,前途也不会太大。而AR单片机类的内容就较多,业界产品占用量大,应用人群广,因此就业空间极大,
而硬件设计最体现水平和水准的就是接口设计这块,这是各个高级硬件工程师相互P,判定水平高低的依据。而接口设计这块最关键的是看时序,而不是简单的连接,比如PXA255处理器I2C要求速度在100bps,如果把一个I2C外围器件,最高还达不到100bps的与它相接,必然要导致设计的失败。这样的情况有很多,比如51单片机可以在总线接LCD,但为什么这种LCD就不能挂在AR的总线上,还有AR7总线上可以外接个winband的SD卡控制器,但为什么这种控制器接不到AR9或是Xscale处理器上,这些都是问题。因此接口并不是一种简单的连接,要看时序,要看参数。一个优秀的硬件工程师应该能够在没有参考方案的前提下设计出一个在成本和性能上更加优秀的产品,靠现有的方案,也要进行适当的可行性裁剪,但不是胡乱的来,我遇到一个工程师把方案中的5V变1.8V的DC芯片,直接更换成LDo,有时就会把CPU烧上几个。前几天还有人希望我帮忙把他们以前基于PXA255平台的手持GPS设备做下程序优化,我问了一下情况,地图是存在SD卡中的,而SD卡与PXA255的C控制器间采用的SPI接口,因此导致地图读取速度十分的慢,这种情况是设计中严重的缺陷,而不是程序的问题,因此我提了几条建议,让他们更新试下再说。因此想成为一个优秀的工程师,需要对系统整体性的把握和对已有电路的理解,换句话说,给你一套电路图你终究能看明白多少,
嵌入式系统原理与设计知识点整理
第一章嵌入式处理器 1嵌入式系统的概念组成: 定义:以应用为主,以计算机技术为基础,软硬件可裁剪,满足系统对功能、性能、可靠性、体积和功耗有严格要求的计算机系统。 组成:硬件:处理器、存储器、I / O设备、传感器 软件:①系统软件, ②应用软件。 2.嵌入式处理器分类特点: 分类:①MPU(Micro Processor Unit)微处理器。一块芯片,没有集成外设接口。部主要由运算器,控制器,寄存器组成。 ②MCU(Micro Controller Unit)微控制器(单片机)。一块芯片集成整个计算机系统。 ③EDSP(Embled Digital Signal Processor)数字信号处理器。运算速度快,擅长于大量重复数据处理 ④SOC(System On Chip)偏上系统。一块芯片,部集成了MPU和某一应用常用的功能模块 3.嵌入式处理器与通用计算机处理器的区别: ①嵌入式处理器种类繁多,功能多样 ②嵌入式处理器能力相对较弱,功耗低 ③嵌入式系统提供灵活的地址空间寻址能力 ④嵌入式系统集成了外设接口 4.①哈佛体系结构:指令和数据分开存储————————(嵌入式存储结构) 特征:在同一机器周期指令和数据同时传输 ②·诺依曼体系结构:指令和数据共用一个存储器——(通用式存数结构) 数据存储结构(多字节): 大端方式:低地址存高位;小端方式:高地址存高位 6.ARM指令集命名:V1~V8 (ARMV表示的是指令集)
7.ARM核命名:. 命名规则:ARM{x}{y}{z}{T}{D}{M}{I}{E}{J}{F}{S}{x}——系列(版本) {y}——当数值为“2”时,表示MMU(存管理单元) {z}——当数值为“0”时,表示缓存Cache {T}——支持16位Thumb指令集 {D}——支持片上Debug(调试) {M}——嵌硬件乘法器 {I}——嵌ICE(在线仿真器)——支持片上断点及调试点 {E}——支持DSP指令 {J}——支持Jazzle技术 {F}——支持硬件浮点 {S}——可综合版本 8. JTAG调试接口的概念及作用: ①概念:(Joint Test Action Group)联合测试行动小组→检测PCB和IC芯片标准。(P CB→印刷电路板IC→集成芯片) ②作用(1)硬件基本功能测试读写 (2)软件下载:将运行代码下载到目标机RAM中 (3)软件调试:设置断点和调试点 (4)FLASH烧写:将运行最终代码烧写到FLASH存储器中。 9.GPIO概念:(General Purpose I/O Ports)通用输入/输出接口,即处理器引脚。 10.S3C2410/S3C2440 GPIO引脚 S3C2410共有117个引脚,可分成A——H共8个组,(GPA,GPB,…GPH组) S3C2440共有130个引脚,可分成A——J共9个组,(GPA,GPB,…,GPH,GPJ 组) 11.GPxCON寄存器,GPxDAT寄存器,GpxUP寄存器的功能,各位含义和用法 ①GPxCON寄存器(控制寄存器)——设置引脚功能 →GPACON(A组有23根引脚,一位对应一个引脚,共32位,拿出0~22位,其余没用) (若某一位是)0:(代表该位的引脚是一个)输出引脚 1:地址引脚 →GPBCON——GPH/JCON(用法一致,两位设置一个引脚) 00:输入引脚 01:输出引脚 10:特殊引脚 11:保留不用 GPBCON ②GPxDAT寄存器(数据寄存器)——设置引脚状态及读取引脚状态 若某一位对应的是输出引脚,写此寄存器相应位可令引脚输出高/低电平。 若某一位对应的是输入引脚,读取此寄存器可知相应引脚电平状态。GPBDAT
嵌入式系统学习心得总结
嵌入式系统学习心得总结 嵌入式系统学习心得总结 嵌入式系统无疑是当前最热门最有发展前途的IT应用领域之一。以下为你带来嵌入式系统学习心得总结,希望对你有所帮助! 嵌入式系统学习心得总结篇1 嵌入式系统用在一些特定专用设备上,通常这些设备的硬件资源(如处理器、存储器等)非常有限,并且对成本很敏感,有时对实时响应要求很高等。特别是随着消费家电的智能化,嵌入式更显重要。像我们平常常见到的手机、PDA、电子字典、可视电话、VCD/DVD/MP3 Player、数字相机(DC)、数字摄像机(DV)、U-Disk、机顶盒(Set Top Box)、高清电视(HDTV)、游戏机、智能玩具、交换机、路由器、数控设备或仪表、汽车电子、家电控制系统、医疗仪器、航天航空设备等等都是典型的嵌入式系统。 看到了嵌入式系统的范围,你也应该知道嵌入式系统工程师是做什么的,就是开发上面的那些电子产品的工程师。 关于如何学习嵌入式? 学习嵌入式,该学习什么基本的知识呢? 首先C语言,这个是毋庸置疑的,不管是做嵌入式软件还是硬件开发的人员,对C语言的掌握这个是必需的,特别是对于以后致力于嵌入式软件开发的人,现在绝大部分都是用C语言,你说不掌握它可以吗?至于如何学习C语言,我想这些基础的知识每个人都有自己的方法,关键要去学习,看书也好,网上找些视频看也好。很多人会问,
C语言要学到怎么样,我觉得这没有标准的答案。我想至少你在明白了一些基础的概念后,就该写代码了,动手才是最重要的,当你动手了,遇到问题了,再反过来学习,反过来查查课本,那时的收获就不是你死看书能得到的。 其次,应该对操作系统有所了解,这对你对硬件和软件的理解,绝对有很大的帮助。应该把系统的管理理解一下,比如进程、线程,系统如何来分配资源的,系统如何来管理硬件的,当然,不是看书就能把这些理解透,如果不是一时能理解,没关系,多看看,结合以后的项目经验,会有更好的理解的。 还有应该学习嵌入式系统,如linux或者wince下的编程,这些对以后做应用的编程很有帮助,当然,如果做手机的话,那可以学习MTK、塞班、Android等操作系统,Android是以后发展的趋势,现在很热门,Android也是基于linux系统封装的,所以建议先学习下linux。 还有,应该学习下单片机或者ARM或者MIPS,很多人说我没有单片机的经验,直接学ARM可以吗?我觉得那完全没有问题的,当然如果你学习过单片机,那最好不过了,以后学习ARM就更简单了。 最后如果你把以上的知识都有所了解后,就该去阅读阅读一些优秀的代码,比如结合arm芯片手册学习去学习下UBOOT的源代码,了解下最小的系统开发,那对你整个嵌入式开发的非常有帮助的,可以的话,还可以学习下linux的源代码,当然如果你直接阅读2.6的代码,我想你会很痛苦的,可以先看看linux 代码早期的版本,比如0.12 的代码等等,麻雀虽小,五脏俱全,如果你全看完了,那我想
(完整版)单片机原理及应用期末考试必考知识点重点总结
单片机概述: 单片机是微单片微型计算机的简称,微型计算机的一种。 它把中央处理器(CPU),随机存储器(RAM),只读存储器(ROM),定时器\计数器以及I\O 接口,串并通信等接口电路的功能集成与一块电路芯片的微型计算机。 字长:在计算机中有一组二进制编码表示一个信息,这组编码称为计算机的字,组成字的位数称为“字长”,字长标志着精度,MCS-51是8位的微型计算机。 89c51 是8位(字长)单片机(51系列为8位) 单片机硬件系统仍然依照体系结构:包括CPU(进行运算、控制)、RAM(数据存储器)、ROM(程序存储器)、输入设备和输出设备、内部总线等。 由于一块尺寸有限的电路芯片实现多种功能,所以制作上要求单片机的高性能,结构简单,工作可靠稳定。 单片机软件系统包括监控程序,中断、控制、初始化等用户程序。 一般编程语言有汇编语言和C语言,都是通过编译以后得到机器语言(二进制代码)。 1.1单片机的半导体工艺 一种是HMOS工艺,高密度短沟道MOS工艺具有高速度、高密度的特点; 另一种是CHMOS工艺,互补金属氧化物的HMOS工艺,它兼有HMOS工艺的特点还具有CMOS的低功耗的特点。例如:8051的功耗是630mW,80C51的功耗只有110mW左右。1.2开发步5骤: 1.设计单片机系统的电路 2.利用软件开发工具(如:Keil c51)编辑程序,通过编译得到.hex的机器语言。 3.利用单片机仿真系统(例如:Protus)对单片机最小系统以及设计的外围电路,进行模拟的硬软件联合调试。 4.借助单片机开发工具软件(如:STC_ISP下载软件)读写设备将仿真中调试好的.hex程序拷到单片机的程序存储器里面。 5.根据设计实物搭建单片机系统。 2.1MCS-51单片机的组成:(有两个定时器) CPU(进行运算、控制)、RAM(数据存储器)、ROM(程序存储器)、I/O口(串口、并口)、内部总线和中断系统等。 工作过程框图如下: 运算器 组成:8位算术逻辑运算单元ALU(Arithmetic Logic Unit)、8位累加器A(Accumulator)、8位寄存器B、程序状态字寄存器PSW(Program Status Word)、8位暂存寄存器TMP1和TMP2等。 功能:完成算术运算和逻辑运算
嵌入式系统基础知识总结
必读:嵌入式系统基础知识总结 2016-07-22电子发烧友网 本文主要介绍嵌入式系统的一些基础知识,希望对各位有帮助。 嵌入式系统基础 1、嵌入式系统的定义 (1)定义:以应用为中心,以计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。 (2)嵌入式系统发展的4个阶段:无操作系统阶段、简单操作系统阶段、实时操作系统阶段、面向Internet阶段。 (3)知识产权核(IP核):具有知识产权的、功能具体、接口规范、可在多个集成电路设计中重复使用的功能模块,是实现系统芯片(SOC)的基本构件。(4)IP核模块有行为、结构和物理3级不同程度的设计,对应描述功能行为的不同可以分为三类:软核、固核、硬核。 2、嵌入式系统的组成 包含:硬件层、中间层、系统软件层和应用软件层 (1)硬件层:嵌入式微处理器、存储器、通用设备接口和I/O接口。 嵌入式核心模块=微处理器+电源电路+时钟电路+存储器
Cache:位于主存和嵌入式微处理器内核之间,存放的是最近一段时间微处理器使用最多的程序代码和数据。它的主要目标是减小存储器给微处理器内核造成的存储器访问瓶颈,使处理速度更快。 (2)中间层(也称为硬件抽象层HAL或者板级支持包BSP). 它将系统上层软件和底层硬件分离开来,使系统上层软件开发人员无需关系底层硬件的具体情况,根据BSP层提供的接口开发即可。 BSP有两个特点:硬件相关性和操作系统相关性。 设计一个完整的BSP需要完成两部分工作: A、嵌入式系统的硬件初始化和BSP功能。 片级初始化:纯硬件的初始化过程,把嵌入式微处理器从上电的默认状态逐步设置成系统所要求的工作状态。 板级初始化:包含软硬件两部分在内的初始化过程,为随后的系统初始化和应用程序建立硬件和软件的运行环境。 系统级初始化:以软件为主的初始化过程,进行操作系统的初始化。 B、设计硬件相关的设备驱动。 (3)系统软件层:由RTOS、文件系统、GUI、网络系统及通用组件模块组成。RTOS是嵌入式应用软件的基础和开发平台。 (4)应用软件:由基于实时系统开发的应用程序组成。