自适应滤波器FPGA的实现
嵌入式系统传感
差分方程:
子带分解的自适应滤波器的FPGA实现
2010-06-02 23:00:25 来源:维库开发网
关键字:子带分解自适应滤波器FPGA
0 引言
自适应滤波器已经广泛应用于信道均衡、回声取消、系统识别、频谱估计等各个方面。基于子带分解的自适应滤波在提高收敛性能的同时又节省了一定的计算量。基于子带分解的自适应滤波是先将输入信号与参考信号经过分解滤波器组进行子带分解、抽取、子带自适应滤波、内插、通过合成滤波器组得到输出信号。基于子带分解的自适应滤波器的优点:
(1)由于对信号的抽取,使完成自适应滤波所需的计算量得以减少;
(2)在子带进行自适应滤波使收敛性能有所提高。
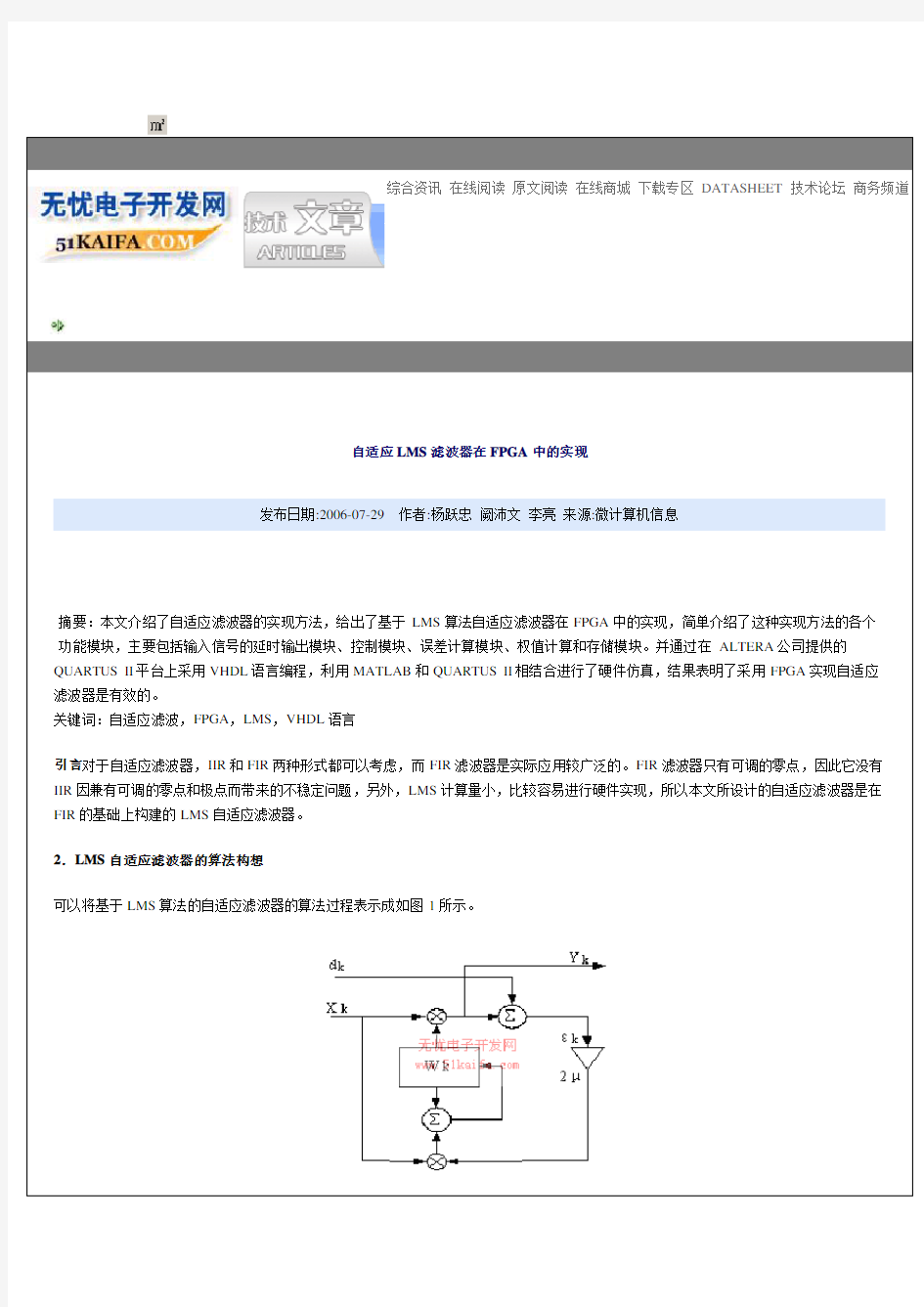
l 基于子带分解的自适应滤波结构
基于子带分解的自适应滤波,其时域结构如图1所示。将输入信号x(n)和参考信号d(n)分别进行子带分解,抽取,在子带上进行自适应滤波,再将子带上的估计信号y0(n)和y1(n)经内插和合成滤波器组得到最后的合成信号。其中滤波器W00(n)和W11(n)是两个子带上的自适应滤波器,而W01(n)和W10(n)表示子带间自适应滤波器。这是由于滤波器组均是FIR滤波器,不可能有锐截止的理想特性,只能以长度为代价来换取近似的特性;这时在严格采样下得到的子带信号必然有混叠,需加入子带间滤波以消除其影响。这里的子带自适应滤波器采用基于NLMS算法自适应滤波器。NLMS算法和LMS算法相比。虽然计算量稍有增加,但可使得自适应滤波器收敛速度大大提高。
2 双通道滤波器组的设计
本文采用的分析和综合滤波器之间的关系如下:
H1(z)=H0(-z),G1(z)=-2H0(-z),G0(z)=2H1(-z)。由上述表达式可知设计的关键是设计H0(z),只要H0(z)确定,H1(z),G0(z),G1(z)也可确定。本文采用等波纹逼近设计法进行滤波器设计。该方法设计的滤波器呈现等波纹频响特性。等波纹逼近设计法设计的滤波器具有如下优点:
(1)由于误差均匀分布于整个频带,对固定的阶数N,可以得到最优良的滤波特性;
(2)通带最平坦,阻带最小衰减达到最大。
Matlab集成了一套强大的滤波器设计工具FDATOOL,可以完成多种滤波器的设计、分析和性能*估。本文中FPGA硬件实现部分用到的4个FIR滤波器的频率特性曲线见图2。
3 系统建模与仿真
DSP Builder是Altera公司推出的一个面向DSP开发的系统级工具,它是作为Matlab 的一个Simulink工具箱(ToolBox)出现的。DSP Bui-lder作为Simulink中的一个工具箱,使得在使用FPGA设计DSP系统时完全可以通过Simulink的图形化界面进行,只需简单地进行DSP Builder工具箱中的模块调用即可。
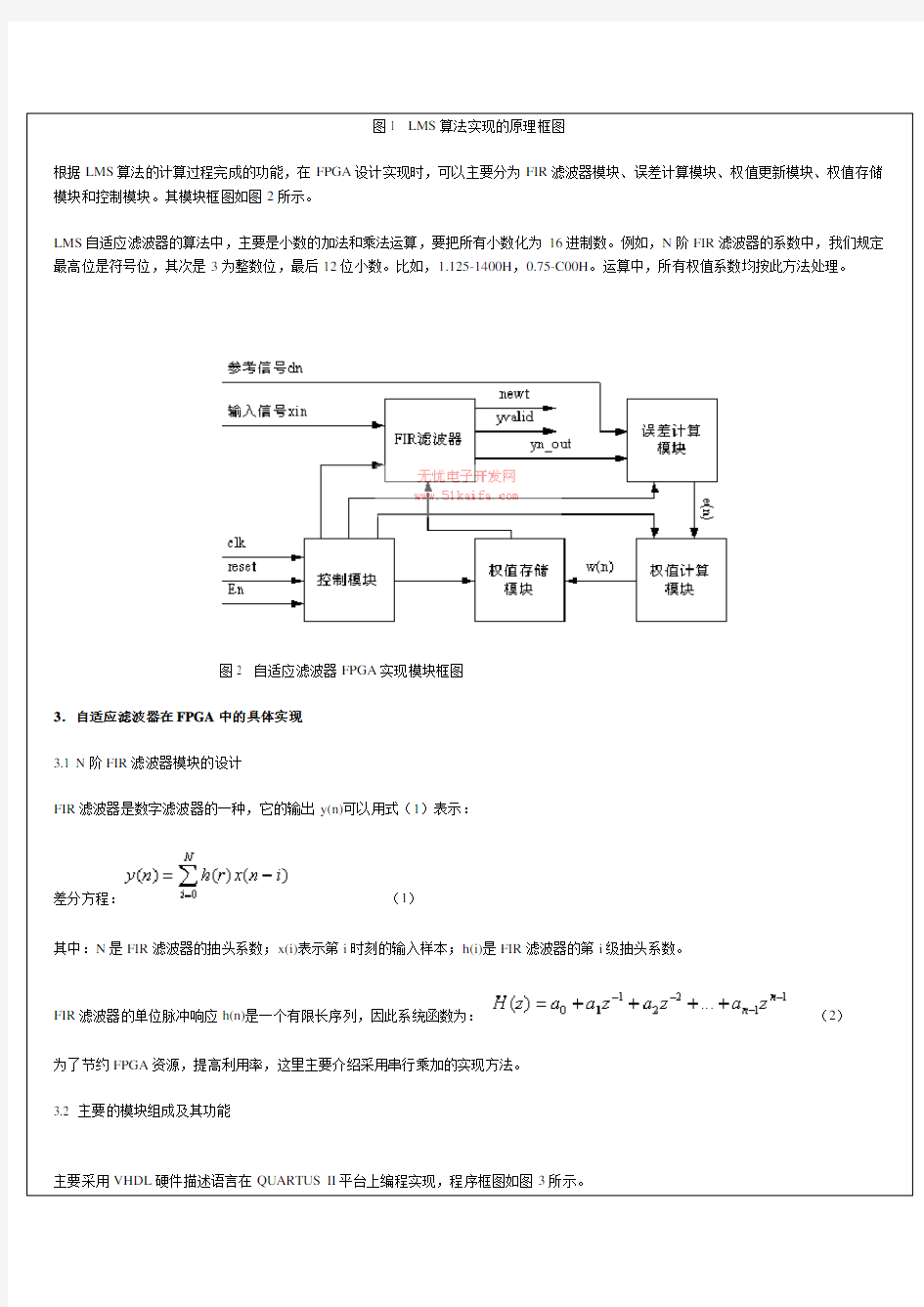
图3中的基于子带分解的自适应滤波器模块框图系统由分析滤波器子系统h00,h01,h10,h11,综合滤波器子系统g00,g01、抽取,插值,加法,减法器,自适应滤波器等模块组成。h00和h10是完全一模一样的低通滤波器,h01和h11是完全一模一样的高通滤波器。h00,h01,g00,g01的幅频特性曲线见图2。h00对应图2中的h0,h01对应图中的h1,g00对应图中的g0,g01对应图中的g1。Subysteml,Subyst-em2,Subystem3,Subystem4是自适应滤波器。Subystem2,Subystem3自适应滤波器的阶数是Subysteml,Subystem4阶数的1/20。期望信号由sine wavel模块提供,输入信号由Sine wave2和Random Bitstream叠加在一起的信号组成。系统所需的模块都是直接调用DSP builder中的模块。Subystem2是7阶NLMS算法自适应滤波器,其框图见图4。如果调高提高收敛速度,
则可增加延迟模块、自适应子系统模块,加法器模块即可,但需消耗更多的硬件资源。
自适应滤波器模块主要由延迟单元,权值更新子系统、加法器模块,乘法器模块组成。它是将抽取过后的信号进行自适应滤波。
FIR滤波器的单位冲激响应是有限长的,其z变换为。分析和综合滤波器系统主要由延迟单元、加法器、加法器模块组成。分析和综合滤波器不可能有锐截止的理想特性,必须通过增加阶数来逼近。分析滤波器子系统h00,h01,h10,h11,综合滤波器子系统g00,g01均采用横截型结构。
权值更新子系统模块主要由乘法器、除法器、加法器、延迟单元、总线类型转换等模块组成。该子系统主要完成滤波器的权值更新。w(k+1)=w(k)+μ/γ+xT(k)x(k)e(k)x(k)运算和wi(k)xi(k)运算。
4 仿真
Matlab的Simulink环境具有强大的图形化仿真验证功能,用DSP Builder模块设计好一
个新的模型后,可以直接在Simulink中进行算法级、系统级仿真验证。该设计的Simulink 仿真如图6所示,输出信号含有毛刺,这说明输出信号与期望信号还有一定的稳态误差。可以通过增加滤波器的阶数,或修改步长控制参数μ,以达到更好的效果。
运行Signal complier可将通过Simulink的模块文件(.mdl)转换成通过的硬件描述语言VHDL文件;运行Testbench(测试平台)可将Sine wavel、Sinewavel+noise、Clock转换成针对HDL仿真器ModelSim的测试文件。由图7可知输出信号Sine out逐渐趋于稳定,逼近与期望信号sine wavel,因此设计结果满足要求,能够实现自适应过程。
5 结语
本文只是从硬件的角度出发设计两个子带自适应滤波器的FPGA实现。由于分解滤波器组的非理想特性,有必要采取子带间滤波,子带间的滤波可大大提高收敛速度。子带自适应滤波器的设计和研究过程是比较复杂的,这里就主要的设计研究思想做了一个阐述,鉴于设计中的自适应滤波器的阶数选取相对较小,因而对自适应滤波器的稳态误差有一定的影响,通过增加自适应滤波器的阶数,分析和综合滤波器的阶数、数据的位数来提高精度。
最新自适应滤波器的设计开题报告
长江大学 毕业设计开题报告 题目名称自适应滤波器的设计与应用学院电信学院 专业班级信工10702班 学生姓名李雪利 指导教师王圆妹老师 辅导教师王圆妹老师 开题报告日期 2010年3月19日
自适应滤波器的设计与应用 学生:李雪利,长江大学电子信息学院 指导教师:王圆妹,长江大学电子信息学院 一、题目来源 来源于其他 二、研究目的和意义 滤波技术在当今信息处理领域中有着极其重要的应用。滤波是从连续的或离散的输入数据中除去噪音和干扰以提取有用信息的过程,相应的装置就称为滤波器。滤波器实际上是一种选频系统,他对某些频率的信号予以很小的衰减,使该部分信号顺利通过。而对其他不需要的频率信号予以很大的衰减,尽可能阻止这些信号通过。滤波器研究的一个目的就是:如何设计和制造最佳的(或最优的)滤波器。 在数字信号处理中,数字滤波是语音和图像处理、模式识别、频谱分析等应用中的一个基本处理算法。在许多应用场合,由于无法预先知道信号和噪声的特性或者它们是随时间变化的,仅仅用 FIR 和 IIR两种具有固定滤波系数的滤波器无法实现最优滤波。在这种情况下,必须设计自适应滤波器,以跟踪信号和噪声的变化。 自适应滤波器是利用前一时刻已获得的滤波器参数,自动地调节、更新现时刻的滤波器参数,以适应信号和噪声未知的统计特性,从而实现最优滤波。当在未知统计特性的环境下处理观测信号时,利用自适应滤波器可以获得令人满意的效果,其性能远超过通用方法所设计的固定参数滤波器。
三、阅读的主要参考文献及资料名称 1、《数字信号处理》刘益成(第二版)西安电子科技出版社 2、《数字信号处理》张小虹(第二版)机械工业出版社 3、自适应信号处理[M].西安:西安电子科技大学出版社,2001. 4.邹理和,数字信号处理, 国防工业出版社,1985 5.丁玉美等, 数字信号处理,西安电子科技大学出版社,1999 6.程佩青, 数字信号处理,清华大学出版社,2001 7. The MathWorks Inc, Signal Processing Toolbox For Use with MATLAB, Sept. 2000 8. vinay K.Ingle, John G.Proakis,数字信号处理及MATLAB实现,陈怀琛等译,电子工业出版社,1998.9 9、《MATLAB编程参考手册》 10、中国期刊网的相关文献 11、赫金,自适应滤波器原理第四版,西安工业出版社,2010-5-1 四、国内外现状和发展趋势与主攻方向 自适应滤波器的理论与技术是50年代末和60年代初发展起来的。它是现代信号处理技术的重要组成部分,对复杂信号的处理具有独特的功能。自适应滤波器在数字滤波器中试属于随机数字信号处理的范畴。对于随机数字信号的滤波处理,通常有维纳滤波,卡尔曼滤波和自适应滤波,维纳滤波的权系数是固定的,适用于平稳随机信号;卡尔曼滤波器的权系数是可变的,适用于非平稳随机信号中。但是,只有在对信号和噪声的统计特性先验
【开题报告】基于FPGA的CIC滤波器的设计与仿真
开题报告 电子信息工程 基于FPGA的CIC滤波器的设计与仿真 一、综述本课题国内外研究动态,说明选题的依据和意义 基于多速率信号处理原理,设计了用于下变频的CIC抽取滤波器,由于CIC滤波器结构只用到加法器和延迟器,没有乘法器,很适合用FPGA来实现。滤波器的结构简单, 需要的存储量小, 是被证明在高速抽取和插值系统中非常有效的单元。 随着数字信号处理算法的不断优化,数字信号处理器(Digital Signal Processors, DSPs)性能的不断提高,数字信号处理技术越来越被广泛地应用在各个领域。数字信号处理技术正朝着高速高性能方向发展,因此这对数字信号处理的手段和工具也提出了更高的要求。 随着现场可编程门阵列(Field Programmable Gate Array, FPGA)制造工艺的不断改进,其集成度和性能的不断提高,采用FPGA对数字信号进行处理越来越受到重视。与DSP相比,FPGA有着不可比拟的优势。一方面,与DSP靠程序指针来运行程序相比,FPGA执行算法的本质是靠电路并行执行的,因此在同样的时钟频率下,使用FPGA完成数字信号处理算法要比使用DSP快得多。另一方面,由于FPGA编程灵活,资源可重新配置,使得在实现数字信号处理时更加灵活,成本更低。因此,FPGA性能的不断提高,能够满足未来复杂数字信号高速实时处理的要求。 用FPGA设计滤波器,无非是是设计一些乘累加单元,其滤波器的各种特性即滤波参数可以通过MATLAB仿真获得。所以首先要做的是确定你滤波器的设计要求,在MATLAB中仿真设计出该滤波器,从而导出滤波器系数,才能在FPGA中使用。 CIC滤波器由于其无需乘法器以及结构特殊,在移动电视直放站的数字信号处理中,可以高效地胜任抽取滤波的任务。然而C1C滤波器也有缺陷,一者通带下垂严重,二者信号折叠带衰减不充分,而且此两者难以兼顾。RS修正法和Kaiser—Hamming补偿法联合使用于CIC滤波器的改进技术中,有效地解决了该问题。 在移动通信系统中,软件无线电的概念已显得越来越重要。众所周知SRC滤波部分的一个重点就是抑制潜在的混叠部分,有一种时变CIC滤波器,他同样是通过先A倍内插再B倍抽样来实现采样率的转换。因此,改进的CIC滤波器在软件无线电中有大的重
自适应滤波器介绍及原理
关于自适应滤波的问题: 自适应滤波器有4种基本应用类型: 1) 系统辨识:这时参考信号就是未知系统的输出,当误差最小时,此时自适应滤波器就与未知系统具有相近的特性,自适应滤波器用来提供一个在某种意义上能够最好拟合未知装置的线性模型 2) 逆模型:在这类应用中,自适应滤波器的作用是提供一个逆模型,该模型可在某种意义上最好拟合未知噪声装置。理想地,在线性系统的情况下,该逆模型具有等于未知装置转移函数倒数的转移函数,使得二者的组合构成一个理想的传输媒介。该系统输入的延迟构成自适应滤波器的期望响应。在某些应用中,该系统输入不加延迟地用做期望响应。 3) 预测:在这类应用中,自适应滤波器的作用是对随机信号的当前值提供某种意义上的一个最好预测。于是,信号的当前值用作自适应滤波器的期望响应。信号的过去值加到滤波器的输入端。取决于感兴趣的应用,自适应滤波器的输出或估计误差均可作为系统的输出。在第一种情况下,系统作为一个预测器;而在后一种情况下,系统作为预测误差滤波器。 4) 干扰消除:在一类应用中,自适应滤波器以某种意义上的最优化方式消除包含在基本信号中的未知干扰。基本信号用作自适应滤波器的期望响应,参考信号用作滤波器的输入。参考信号来自定位的某一传感器或一组传感器,并以承载新息的信号是微弱的或基本不可预测的方式,供给基本信号上。 这也就是说,得到期望输出往往不是引入自适应滤波器的目的,引入它的目的是得到未知系统模型、得到未知信道的传递函数的倒数、得到未来信号或误差和得到消除干扰的原信号。 1 关于SANC (自适应消噪)技术的问题 自适应噪声消除是利用winer 自适应滤波器,以输入信号的时延信号作为参考信号来进行滤波的,其自适应消噪的原理说明如下: 信号()x n 可分解为确定性信号分量()D x n 和随机信号分量()R x n ,即: ()()()D R x n x n x n =+ (1.1) 对于旋转机械而言,确定性信号分量()D x n 通常可表示为周期或准周期信号分量()P x n ,即: ()()()P R x n x n x n =+ 1.2 对信号()x n 两个分量()P x n 和()R x n ,有两个基本假设: (1) ()P x n 和()R x n 互不相关; (2) ()P x n 和()R x n 的自相关函数具有下述特性:()0P P x x R m ≈, N m M ≥;()0R R x x R m ≈,B m M ≥;
自适应滤波器毕业设计论文
大学 数字信号处理课程要求论文 基于LMS的自适应滤波器设计及应用 学院名称: 专业班级: 学生姓名: 学号: 2013年6月
摘要自适应滤波在统计信号处理领域占有重要地位,自适应滤波算法直接决定着滤波器性能的优劣。目前针对它的研究是自适应信号处理领域中最为活跃的研究课题之一。收敛速度快、计算复杂性低、稳健的自适应滤波算法是研究人员不断努力追求的目标。 自适应滤波器是能够根据输入信号自动调整性能进行数字信号处理的数字滤波器。作为对比,非自适应滤波器有静态的滤波器系数,这些静态系数一起组成传递函数。研究自适应滤波器可以去除输出信号中噪声和无用信息,得到失真较小或者完全不失真的输出信号。本文介绍了自适应滤波器的理论基础,重点讲述了自适应滤波器的实现结构,然后重点介绍了一种自适应滤波算法最小均方误差(LMS)算法,并对LMS算法性能进行了详细的分析。最后本文对基于LMS算法自适应滤波器进行MATLAB仿真应用,实验表明:在自适应信号处理中,自适应滤波信号占有很重要的地位,自适应滤波器应用领域广泛;另外LMS算法有优也有缺点,LMS算法因其鲁棒性强特点而应用于自回归预测器。 关键词:自适应滤波器,LMS算法,Matlab,仿真
1.引言 滤波技术在当今信息处理领域中有着极其重要的应用。滤波是从连续的或离散的输入数据中除去噪音和干扰以提取有用信息的过程,相应的装置就称为滤波器。滤波器实际上是一种选频系统,他对某些频率的信号予以很小的衰减,使该部分信号顺利通过;而对其他不需要的频率信号予以很大的衰减,尽可能阻止这些信号通过。滤波器研究的一个目的就是:如何设计和制造最佳的(或最优的)滤波器。Wiener于20世纪40年代提出了最佳滤波器的概念,即假定线性滤波器的输入为有用信号和噪音之和,两者均为广义平稳过程且己知他们的二阶统计过程,则根据最小均方误差准则(滤波器的输出信号与期望信号之差的均方值最小)求出最佳线性滤波器的参数,称之为Wiener滤波器。同时还发现,在一定条件下,这些最佳滤波器与Wiener滤波器是等价的。然而,由于输入过程取决于外界的信号、干扰环境,这种环境的统计特性常常是未知的、变化的,因而不能满足上述两个要求,设计不出最佳滤波器。这就促使人们开始研究自适应滤波器。自适应滤波器由可编程滤波器(滤波部分)和自适应算法两部分组成。可编程滤波器是参数可变的滤波器,自适应算法对其参数进行控制以实现最佳工作。自适应滤波器的参数随着输入信号的变化而变化,因而是非线性和时变的。 2. 自适应滤波器的基础理论 所谓自适应滤波,就是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。所谓“最优”是以一定的准则来衡量的,最常用的两种准则是最小均方误差准则和最小二乘准则。最小均方误差准则是使误差的均方值最小,它包含了输入数据的统计特性,准则将在下面章节中讨论;最小二乘准则是使误差的平方和最小。 自适应滤波器由数字结构、自适应处理器和自适应算法三部分组成。数字结构是指自适应滤波器中各组成部分之间的联系。自适应处理器是前面介绍的数字滤波器(FIR或IIR),所不同的是,这里的数字滤波器是参数可变的。自适应算法则用来控制数字滤波器参数的变化。 自适应滤波器可以从不同的角度进行分类,按其自适应算法可以分为LMS自适应滤波
自适应滤波器的应用
中国地质大学(北京)自适应滤波器的应用小论文 课程名称:地球物理信息处理基础 老师:景建恩 学生:李东 学号:2110120011 学院:地信学院 日期:2012年11月22日
自适应滤波器的应用 摘要:自适应滤波器可以在没有任何关于信号和噪声的先验知识的条件下,利用前一时刻已获得的滤波器参数来自动调节现时刻的滤波器参数,以适应信号和噪声未知或随机变化的统计特性,从而实现最优滤波。自适应滤波器可用于干扰对消,在地球物理领域也得到了广泛的应用。 一、自适应滤波器简介 滤波器的分类方法很多,总的来说可分为经典滤波器和现代滤波器两大类。经典滤波器是假定输入信号() x k中的有用成分和希望去掉的成分各占有不同的频带,即关于信号和噪 声应具有一定的先验知识,这样当原始信号通过一个线性系统时有效地除去无用的成分。如果有用信号和噪声的频谱相互重叠,那么经典滤波器就无能为力了。现代滤波器是在没有任何关于信号和噪声的先验知识的条件下,从含有噪声的测量数据或时间序列() x k中估计出 信号的某些特征或信号本身。一旦信号被估计出,那么被估计出的信号将比原信号具有更高的信噪比。现代滤波器把信号和噪声都视为随机信号,利用它们的统计特征(如自相关函数、功率谱等)导出一套最佳的估计算法,然后用硬件或用软件予以实现。根据所处理的信号不同,滤波器还通常分为模拟滤波器和数字滤波器。现代滤波器大多是数字滤波器。 自适应滤波器属于现代滤波器的范畴,它是40年代发展起来的自适应信号处理领域的一个重要应用。自适应信号处理主要是研究结构可变或可调整的系统,它可以通过自身与外界环境的接触来改善自身对信号处理的性能。通常这类系统是时变的非线性系统,可以自动适应信号传输的环境和要求,无须详细知道信号的结构和实际知识,无须精确设计处理系统本身。自适应系统的非线性特性主要是由系统对不同的信号环境实现自身参数的调整来确定的。自适应系统的时变特性主要是由其自适应响应或自适应学习过程来确定的,当自适应过程结束和系统不再进行时,有一类自适应系统可成为线性系统,并称为线性自适应系统,因为这类系统便于设计且易于数学处理,所以实际应用广泛。本文研究的自适应滤波器就是这类滤波器。自适应信号处理的应用领域包括通信、雷达、声纳、地震学、导航系统、生物医学和工业控制等。 自适应滤波器是相对固定滤波器而言的,固定滤波器属于经典滤波器,它滤波的频率是固定的,自适应滤波器滤波的频率则是自动适应输入信号而变化的,所以其适用范围更广。在没有任何关于信号和噪声的先验知识的条件下,自适应滤波器利用前一时刻已获得的滤波器参数来自动调节现时刻的滤波器参数,以适应信号和噪声未知或随机变化的统计特性,从而实现最优滤波。实际情况中,由于信号和噪声的统计特性常常未知或无法获知,为自适应滤波器提供广阔的应用空间。系统辨识、噪声对消、自适应谱线增强、通信信道的自适应均衡、线性预测、自适应天线阵列等是自适应滤波器的主要应用领域。 二、自适应滤波算法原理 当输入信号和噪声的统计特性未知或输入过程的统计特性发生变化时,自适应滤波能自动调整自身参数以满足某种最佳准则要求> 根据不同的准则,产生不同的自适应算法,但主要有两种基本的算法:最小均方误差(LMS)算法和递推最小二乘(RLS)算法。最小均方误差算法,因其具有计算量小、易于实现等优点而在实践中被广泛采用。最小均方误差算法的基本思想是:调整滤波器自身参数,使滤波器的输出信号与期望输出信号之间的均方误差
自适应滤波器的原理与设计
实验二 自适应滤波信号 一、实验目的: 1.利用自适应LMS 算法实现FIR 最佳维纳滤波器。 2.观察影响自适应LMS算法收敛性,收敛速度以及失调量的各种因素,领会自适应信号处理方法的优缺点。 3.通过实现AR 模型参数的自适应估计,了解自适应信号处理方法的应用。 二、实验原理及方法 自适应滤波是一种自适应最小均方误差算法(LMS ),这种算法不像维纳滤波器需要事先知道输入和输出信号的自相关和互相关矩阵,它所得到的观察值 ,滤波器等价于自动“学习”所需要的相关函数,从而调整FIR 滤波器的权系数,并最终使之收敛于最佳值,即维纳解。 )(n y 下面是自适应FIR 维纳滤波器的LMS 算法公式: (2-1) )()()(0 ^ ^ m n y n h n x M m m -=∑= (2-2) ^ )()()(n x n x n e -=M m m n y n e n h n h m m ?=-?+=+,1) ()(2)()1(^ ^ μ (2-3) 其中FIR 滤波器共有M+1个权系数,表示FIR 滤波器第m 个权系数在第n 步的估计值。 ),0)((^ M m n h m ?=因此,给定初始值)M ,0(),0(?=m h m ,每得到一个样本,可以递归得到一组新的滤波器权系数,只要步长)(n y μ满足 max 1 0λμ< < (2-4) 其中max λ为矩阵R 的最大特征值,当∞→n 时,)M ,0(),0(?=m h m 收敛于维纳解。
现在我们首先考察只有一个权系数h 的滤波器,如图2.1所示。假如信号由下式确定: )(n y )()()(y n w n s n += (2-5) )()(n hx n s = (2-6) 其中h 为标量常数,与互不相关,我们希望利用和得到 )(n x )(n w )(n y )(n x )(n s 图1 利用公式(2-1),(2-2),(2-3),我们可以得到下面的自适应估计算法: (2-7) )()()(^ ^n x n h n s = (2-8) )())()()((2)()1(^ ^ ^ n x n x n h n y n h n h -+=+μ其框图如图所示。 图2 选择的初始值为,对式2-8取数学期望可得 ^)(n h ^ )0(h (2-9) ))0(()21(])([^ ^ h h R h n h E n --+=μ其中
FPGA实现FIR抽取滤波器的设计
FPGA实现FIR抽取滤波器的设计FIR(fini te impulse response)滤波器是数字信号处理系统中最基本的元件,它可以在保证任意幅频特性的同时具有严格的线性相频特性,同时其单位冲激响应是有限的,没有输入到输出的反馈,系统稳定。因此,FIR滤波器在通信、图像处理、模式识别等领域都有着广泛的应用。在工程实践中,往往要求对信号处理要有实时性和灵活性,而已有的一些软件和硬件实现方式则难以同时达到这两方面的要求。随着可编程逻辑器件的发展,使用FPG A来实现FIR滤波器,既具有实时性,又兼顾了一定的灵活性,越来越多的电子工程师采用FPGA器件来实现FIR滤波器。 1 FIR滤波器工作原理 在进入FIR滤波器前,首先要将信号通过A/D器件进行模数转换,使之成为8bit的数字信号,一般可用速度较高的逐次逼进式A/D转换器,不论采用乘累加方法还是分布式算法设计FIR滤波器,滤波器输出的数据都是一串序列,要使它能直观地反应出来,还需经过数模转换,因此由FPGA构成的FIR滤波器的输出须外接D/A模块。FPGA有着规整的内部逻辑阵列和丰富的连线资源,特别适合于数字信号处理任务,相对于串行运算为主导的通用DSP芯片来说,其并行性和可扩展性更好,利用FPGA乘累加的快速算法,可以设计出高速的FIR数字滤波器。
2 16阶滤波器结构 在滤波过程中实现抽取,对于抽取率为N的抽取滤波器而言,当进来N个数据时滤波器完成1次滤波运算,输出1次滤波结果。抽取滤波器的结果和先滤波后抽取的结果是一致的,只是对于同样的数据,进行滤波运算的次数大大减少。在数字系统中采用拙取滤波器的最大优点是增加了每次滤波的可处理时间,从而达到实现高速输入数据的目的。采样数据与滤波器系数在控制电路的作用下,分别对应相乘并与前一个乘积累加,经过多次(有多少阶就要多少次)反复的乘累加最后输出滤波结果,将相同系数归类,16阶滤波器公式: 乘法器的数量减少一半,但加法器的数量增多了,但相对乘法运算来说,加法运算所占用的资源少的多,运算的速度也快得多。 3 滤波器系数的求取 使用Matlab集成的滤波器设计工具FDAtool,可以完成多种滤波器的数值设计、分析与评估,设计16阶低通滤波器参数如下:
自适应滤波器的dsp实现
学号: 课程设计 学院 专业 年级 姓名 论文题目 指导教师职称 成绩 2013年 1 月 10 日
目录 摘要 (1) 关键词 (1) Abstract (1) Key words (1) 引言 (1) 1 自适应滤波器原理 (2) 2 自适应滤波器算法 (3) 3 自适应滤波算法的理论仿真与DSP实现 (5) 3.1 MATLAB仿真 (5) 3.2 DSP的理论基础 (7) 3.3 自适应滤波算法的DSP实现 (9) 4 结论 ............................................... 错误!未定义书签。致谢 ................................................. 错误!未定义书签。参考文献 ............................................. 错误!未定义书签。
自适应滤波器算法的DSP实现 学生姓名:学号: 学院:专业: 指导教师:职称: 摘要:本文从自适应滤波器的基本原理、算法及设计方法入手。本设计最终采用改进的LMS算法设计FIR结构自适应滤波器,并采用MATLAB进行仿真,最后用DSP 实现了自适应滤波器。 关键词:DSP(数字信号处理器);自适应滤波器;LMS算法;FIR结构滤波器 DSP implementation of the adaptive filter algorithm Abstract:In this article, starting from the basic principles of adaptive filter and algorithms and design methods. Eventually the design use improved the LMS algorithm for FIR adaptive filter,and use MATLAB simulation, adaptive filter using DSP. Key words:DSP;adaptive filter algorithm;LMS algorithm;FIR structure adaptive filter 引言 滤波是电子信息处理领域的一种最基本而又极其重要的技术。在有用信号的传输过程中,通常会受到噪声或干扰的污染。利用滤波技术可以从复杂的信号中提取所需要的信号,同时抑制噪声或干扰信号,以便更有效地利用原始信号。滤波器实际上是一种选频系统,它对某些频率的信号予以很小的衰减,让该部分信号顺利通过;而对其他不需要的频率信号则予以很大的衰减,尽可能阻止这些信号通过。在电子系统中滤波器是一种基本的单元电路,使用很多,技术也较为复杂,有时滤波器的优劣直接决定产品的性能,所以很多国家非常重视滤波器的理论研究和产品开发[1]。近年来,尤其数字滤波技术使用广泛,数字滤波理论的研究及其产品的开发一直受到很多国家的重视。从总的来说滤波可分为经典滤波和现代滤波。经典滤波要求已知信号和噪声的统计特性,如维纳滤波和卡尔曼滤波。现代滤波则不要求己知信号和噪声的统计特性,如自适应滤波。 自适应滤波器是统计信号处理的一个重要组成部分。在实际应用中,由于没有充足的信息来设计固定系数的数字滤波器,或者设计规则会在滤波器正常运行时改变,因此我们需要研究自适应滤波器。凡是需要处理未知统计环境下运算结果所产生的信
word完整版自适应滤波器原理 带图带总结word版推荐文档
第二章自适应滤波器原理 2.1 基本原理 2.1.1 自适应滤波器的发展 在解决线性滤波问题的统计方法中,通常假设已知有用信号及其附加噪声的某些统计参数(例如,均值和自相关函数) ,而且需要设计含噪数据作为其输入的线性滤波器,使得根据某种统计准则噪声对滤波器的影响最小。实现该滤波器优化问题的一个有用方法是使误差信号(定义为期望响应与滤波器实际输出之差)的均方值最小化。对于平稳输入,通常采用所谓维纳滤波器( Wiener filter) 的解决方案。该滤波器在均方误差意义上使最优的。误差信号均方值相对于滤波器可调参数的曲线通常称为误差性能曲面。该曲面的极小点即为维纳解。 维纳滤波器不适合于应对信号和/或噪声非平稳问题。在这种情况下,必须假设最优滤波器为时变形式。对于这个更加困难的问题,十分成功的一个解决方案使采用卡尔曼滤波器 (Kalman filter )。该滤波器在各种工程应用中式一个强有力的系统。 维纳滤波器的设计要求所要处理的数据统计方面的先验知识。只有当输入数据的统计特性与滤波器设计所依赖的某一先验知识匹配时,该滤波器才是最优的。当这个信息完全未知时,就不可能设计维纳滤波器,或者该设计不再是最优的。而且维纳滤波器的参数是固定的。 在这种情况下,可采用的一个直接方法是“估计和插入过程”。该过程包含两个步骤,首先是“估计”有关信号的统计参数,然后将所得到的结果“插入( plug into)”非递归公式以计算滤波器参数。对于实时运算,该过程的缺点是要求特别精心制作,而且要求价格昂贵的硬件。为了消除这个限制,可采用自适应滤波器(adaptive filter)。采用这样一种系统,意味着滤波器是自设计的,即自适应滤波器依靠递归算法进行其计算,这样使它有可能在无法获得有关信号特征完整知识的环境下,玩完满地完成滤波运算。该算法将从某些预先确定的初始条件集出发,这些初始条件代表了人们所知道的上述环境的任何一种情况。我们还发现,在平稳环境下,该运算经一些成功迭代后收敛于某种统计意义上的最优维纳解。在非平稳环境下,该算法提供了一种跟踪能力,即跟踪输入数据统计特性随时间的变化,只要这种变化时足够缓慢的。 40年代,N.维纳用最小均方原则设计最佳线性滤波器,用来处理平稳随机
基于FPGA的FIR滤波器设计与实现
目录 引言 (4) 第一章FPGA的设计流程 (5) 1.1 FPGA概述 (5) 1.2 FPGA设计流程 (9) 1.3硬件描述语言HDL(Hardware Description Language) (10) 1.4 FPGA开发工具Quartus Ⅱ软件设计流程 (13) 第二章有限冲激响应(FIR)滤波器的原理及设计 (16) 2.1数字信号处理基础原理 (16) 2.2 FIR滤波器背影知识 (19) 2.3 FIR数字滤波器原理 (21) 2.4 利用窗函数法设计FIR滤波器 (26) 第三章FIR 数字滤波器的FPGA实现 (31) 3.1串行FIR滤波器原理 (31) 3.2分布式算法基础 (32) 3.3直接型FIR滤波器的原理结构图 (34) 3.4具有转置结构的FIR滤波器 (36) 第四章结论与总结 (40) 谢辞 (42) 参考文献 (43)
摘要:本论文课题是《基于FPGA的FIR滤波器设计与实现》。数字滤波器是语音与图象处理、模式识别、雷达信号处理、频谱分析等应用中的一种基本的处理部件,它能满足滤波器对幅度和线性相位的严格要求,避免模拟滤波器所无法克服的电压漂移、温度漂移和噪声等问题。有限冲激响应(FIR)滤波器能在设计任意幅频特性的同时保证严格的线性相位特性。因此在许多应用领域都显示了强大的生命力,具有重要应用意义。本文介绍了用VHDL实现线性相位FIR(有限长单位冲激响应)滤波器。提出了一种基于FPGA的FIR滤波器设计方案。介绍了基于FPGA的FIR滤波器的数字信号处理的算法设计,采用直接型和转置型的基本结构来设计,其运算效率明显提高,并结合先进的EDA软件进行高效的设计和实现,并给出了用Quartus Ⅱ运行的仿真结果。该设计对FPGA硬件资源的利用高效合理,用VHDL编程,在PFGA中实现了高采样率的FIR滤波器。关键字:FIR滤波器;FPGA;VHDL;MATLAB;Quartus Ⅱ
自适应滤波器的设计与实现毕业论文
自适应滤波器的设计与实现毕业论文 目录 第一章前言 (1) 1.1 自适应滤波器简介 (1) 1.2 选题背景及研究意义 (1) 1.3 国外研究发展现状 (2) 第二章自适应滤波器的基础理论 (4) 2.1 滤波器概述 (4) 2.1.1 滤波器简介 (4) 2.1.2 滤波器分类 (4) 2.1.3 数字滤波器概述 (4) 2.2 自适应滤波器基本理论 (7) 2.3 自适应滤波器的结构 (9) 第三章自适应滤波器递归最小二乘算法 (11) 3.1 递归最小二乘算法 (11) 3.1.1 递归最小二乘算法简介 (11) 3.1.2 正则方程 (11) 3.1.3 加权因子和正则化 (16) 3.1.4 递归计算 (18) 3.2递归最小二乘(RLS)算法的性能分析 (22) 第四章基于MATLAB自适应滤波器仿真 (23) 4.1 正弦波去噪实验 (23) 4.2 滤波器正则化参数的确定 (28) 4.2.1 高信噪比 (28) 4.2.2 低信噪比 (31) 4.2.3 结论 (33) 4.3 输入信号不同对滤波效果的影响 (33)
4.3.1 输入信号为周期信号 (33) 4.3.2 输入信号为非周期信号 (38) 第五章结论与展望 (44) 5.1 结论 (44) 5.2 对进一步研究的展望 (44) 参考文献 (45) 致谢 (46) 附录 (46) 声明 (58)
第一章前言 1.1自适应滤波器简介 自适应滤波器属于现代滤波的畴,它是40年代发展起来的自适应信号处理领域的一个重要应用,自适应信号处理主要是研究结构可变或可调整的系统,可以通过自身与外界的接触来改善自身对信号处理的性能,通常这类系统是时变的非线性系统,可以自动适应信号传输的环境和要求,无须详细的知道信号的结构和实际知识,无须精确设计处理系统本身。 自适应系统的非线性特性主要是由系统对不同的信号环境实现自身参数的调整来确定的。自适应系统的时变特性主要是由其自适应响应或自适应学习过程来确定的,当自适应过程结束和系统不再进行时,有一类自适应系统可成为线性系统,并称为线性自适应系统,因为这类系统便于设计且易于数学处理,所以实际应用广泛。本文研究的自适应滤波器就是这类滤波器。 自适应滤波器是相对固定滤波器而言的,固定滤波器属于经典滤波器,它滤波的频率是固定的,自适应滤波器的频率则是自动适应输入信号而变化的,所以其适用围更广。在没有任何信号和噪声的先验知识的条件下,自适应滤波器利用前一时刻已获得的滤波器参数来自动调节现时刻的滤波器参数,以适应信号和噪声未知或随机变化的统计特性,从而实现最优滤波。1.2选题背景及研究意义 伴随着移动通信事业的飞速发展,自适应滤波技术应用的围也日益扩大。早在20世纪40年代,就对平稳随机信号建立了维纳滤波理论。根据有用信号和干扰噪声的统计特性(自相关函数或功率谱),用线性最小均方误差估计准则设计的最佳滤波器,称为维纳滤波器。这种滤波器能最大程度地滤除干扰噪声,提取有用信号。但是,当输入信号的统计特性偏离设计条件,则它就不是最佳的了,这在实际应用中受到了限制。到60年代初,由于空间技术的发展,出现了卡尔曼滤波理论,即利用状态变量模型对非平稳、多输入多输出随机序列作最优估计。现在,卡尔曼滤波器已成功地应用到许多领域,它既可对平稳的和非平稳的随机信号作线性最佳滤波,也可作非线性滤波。实质上,维纳滤波器是卡尔曼滤波器的一个特例。 在设计卡尔曼滤波器时,必须知道产生输入过程的系统的状态方程和测量方程,即要求对信号和噪声的统计特性有先验知识,但在实际中,往往难以预知这些统计特性,因此实现不了真正的最佳滤波。 Widrow.B等于1967年提出的自适应滤波理论,可使自适应滤波系统的参数自动地调整而
自适应滤波算法理解与应用
自适应滤波算法理解与应用 什么是自适应滤波器自适应滤波器是能够根据输入信号自动调整性能进行数字信号处理的数字滤波器。作为对比,非自适应滤波器有静态的滤波器系数,这些静态系数一起组成传递函数。 对于一些应用来说,由于事先并不知道所需要进行操作的参数,例如一些噪声信号的特性,所以要求使用自适应的系数进行处理。在这种情况下,通常使用自适应滤波器,自适应滤波器使用反馈来调整滤波器系数以及频率响应。 总的来说,自适应的过程涉及到将代价函数用于确定如何更改滤波器系数从而减小下一次迭代过程成本的算法。价值函数是滤波器最佳性能的判断准则,比如减小输入信号中的噪声成分的能力。 随着数字信号处理器性能的增强,自适应滤波器的应用越来越常见,时至今日它们已经广泛地用于手机以及其它通信设备、数码录像机和数码照相机以及医疗监测设备中。 下面图示的框图是最小均方滤波器(LMS)和递归最小平方(en:Recursive least squares filter,RLS,即我们平时说的最小二乘法)这些特殊自适应滤波器实现的基础。框图的理论基础是可变滤波器能够得到所要信号的估计。 自适应滤波器有4种基本应用类型:1)系统辨识:这时参考信号就是未知系统的输出,当误差最小时,此时自适应滤波器就与未知系统具有相近的特性,自适应滤波器用来提供一个在某种意义上能够最好拟合未知装置的线性模型 2)逆模型:在这类应用中,自适应滤波器的作用是提供一个逆模型,该模型可在某种意义上最好拟合未知噪声装置。理想地,在线性系统的情况下,该逆模型具有等于未知装置转移函数倒数的转移函数,使得二者的组合构成一个理想的传输媒介。该系统输入的延迟构成自适应滤波器的期望响应。在某些应用中,该系统输入不加延迟地用做期望响应。3)预测:在这类应用中,自适应滤波器的作用是对随机信号的当前值提供某种意义上的一个最好预测。于是,信号的当前值用作自适应滤波器的期望响应。信号的过去值加到滤
FIR带通滤波器的FPGA实现
FIR带通滤波器的FPGA实现 时间:2009-11-11 09:14:40 来源:现代电子技术作者:石兴华,吴光敏引言 在FPGA应用中,比较广泛而基础的就是数字滤波器。根据其单位冲激响应函数的时域特性可分为无限冲击响应(Infinite Impulse Response,IIR)滤波器和有限冲击响应(Finite Impulse Response,FIR)滤波器。DSP Builder集成了Altera和Matlab/Simulink基于FPGA的信号处理的建模和设计。该工具可以将数字信号处理算法(DSP)系统表示成为一个高度抽象的模块,在不降低硬件性能的前提下,自动将系统映射为一个基于FPGA的硬件设计方案。即支持设计者在Matlab中完成算法设计,在Simulink软件中完成系统集成,然后通过SignalCompiler(模块名)生成在QuartusⅡ软件中可以使用的硬件描述语言,最终实现硬件系统的设计。FIR滤波器是DSPBuilder应用中最为常用的模块之一,在此基于上述基础,设计实现了基于模块的FIR数字带通滤波器。 1 基于DSP Builder的滤波系统设计 1.1 FIR滤波器原理 有限冲激响应(Finite Impulse Response,FIR)滤波器是由有限个采样值组成,实现的方式是非递归、稳定的,在满足幅频响应要求的同时,可以获得严格的线性相位特性,因此在高保真的信号处理等领域得到广泛应用。 对于一个FIR滤波器系统,它的冲击相应总是有限长的,其系统函数可记为: 最基本的FIR滤波器可表示为: 式中:z(n)是输入采样序列;h(n)是滤波器系数;L是滤波器阶数;y(n)表示滤波器输出序列,为x(n)和h(n)的卷积。FIR滤波器基本结构如图1所示。 对于一个4阶滤波器子系统其输出可表示为: 可见在这个子系统中共需要4个延时器,4个乘法单元和一个4输入的加法器,并可以根据实际需要选择调用子系统构成多阶滤波器。 1.2 滤波的总体要求及实现
自适应滤波器的设计(终极版)
目录 摘要…………………..………………………………………………………..….............I 第1章绪论....................................................................................................................错误!未定义书签。 1.1引言……………………………………………...…..…………...……………...错误!未定义书签。 1.2课题研究意义和目的 (1) 1.3国内外研究发展状况 (2) 1.4本文研究思路与主要工作 (4) 第2章自适应滤波器理论基础 (5) 2.1自适应滤波器简介 (5) 2.2自适应滤波器的原理 (5) 2.3自适应滤波算法 (7) 2.4TMS320VC5402的简介 (8) 第3章总体方案设计 (10) 3.1无限冲激响应(IIR)滤波器 (10) 3.2有限冲激响应(FIR)滤波器 (11) 3.3电路设计 (11) 4基于软件设计及仿真 (17) 4.3 DSP的理论基础 (17) 4.4自适应滤波算法的DSP实现 (18) 5总结 (21) 参考文献 (22) 致谢 (23) 附录自适应滤波源代码 (24)
第1章绪论 1.1引言 随着微电子技术和计算机技术的迅速发展,具备了实现自适应滤波器技术的各种软硬件条件,有关自适应滤波器的新算法、新理论和新的实施方法不断涌现,对自适应滤波的稳定性、收敛速度和跟踪特性的研究也不断深入,这一切使该技术越来越成熟,并且在系统辨识、通信均衡、回波抵消、谱线增强、噪声抑制、系统模拟语音信号处理、生物医学电子等方面都获得了广泛应用口。自适应滤波器实现的复杂性通常用它所需的乘法次数和阶数来衡量,而DSP强大的数据吞吐量和数据处理能力使得自适应滤波器的实现更容易。目前绝大多数的自适应滤波器应用是基于最新发展的DSP 来设计的. 滤波技术是信号处理中的一种基本方法和技术,尤其数字滤波技术使用广泛,数字滤波理论的研究及其产品的开发一直受到很多国家的重视。从总的来说滤波可分为经典滤波和现代滤波。经典滤波要求已知信号和噪声的统计特性,如维纳滤波和卡尔曼滤波。现代滤波则不要求己知信号和噪声的统计特性,如自适应滤波。自适应滤波的原理就是利用前一时刻己获得的滤波参数等结果,自动地调节现时刻的滤波参数,从而达到最优化滤波。自适应滤波具有很强的自学习、自跟踪能力,适用于平稳和非平稳随机信号的检测和估计。自适应滤波一般包括3个模块:滤波结构、性能判据和自适应算法。其中,自适应滤波算法一直是人们的研究热点,包括线性自适应算法和非线性自适应算法,非线性自适应算法具有更强的信号处理能力,但计算比较复杂,实际应用最多的仍然是线性自适应滤波算法。线性自适应滤波算法的种类很多,有LMS自适应滤波算法、R路自适应滤波算法、变换域自适应滤波算法、仿射投影算法、共扼梯度算法等。 1.2课题研究意义和目的 自适应滤波理论与技术是现代信号处理技术的重要组成部分,对复杂信号的处理具有独特的功能,对自适应滤波算法的研究是当今自适应信号处理中最为活跃的研究课题之一。自适应滤波器与普通滤波器不同,它的冲激响应或滤波参数是随外部环境的变化而变化的,经过一段自动调节的收敛时间达到最佳滤波的要求。自适应滤波器本身有一个重要的自适应算法,这个算法可以根据输入、输出及原参量信号按照一定准则修改滤波参量,以使它本身能有效的跟踪外部环境的变化。因此,自适应数字系
自适应滤波器MATLAB仿真
自适应滤波器 MATLAB仿真 摘要 : 本文介绍了自适应滤波器的工作原理,以及推导了著名的LMS( Least mean squares )算法。以一个例子演示了自适应滤波器的滤波效果。实验结果表明,该滤波器滤波效果较好。 关键词:自适应滤波器 MATLAB7.0 LMS 算法 Simulate of adaptive filter based on MATLAB7.0 Abstract: This article described the working principle of adaptive filter and deduced the well-known LMS algorithm. Take an example to demonstrate the adaptive filters filtering effects. The results show that the filter has an effective way to filter single. Key words: LMS algorithm Adaptive Filter Matlab7.0 1引言 由 Widrow B 等提出的自适应滤波理论,是在维纳滤波、卡尔曼滤波等线性滤波基础上发展起来的一种最佳滤波方法。由于它具有更强的适应性和更优的滤波性能,从而广泛应用于通信、系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测和自适应天线阵等诸多领域[1]。自适应滤波器最大的优点在于不需要知道信号和噪声的统计特性的先验知识就可以实现信号的最佳滤波处理。本文通过一个具体例子和结果论证了自适应滤波器的滤波效果。 2自适应滤波原理及 LMS算法 2.1 自适应滤波原理 图 1 自适应滤波原理图 在自适应滤波器中,参数可调的数字滤波器一般为 FIR 数字滤波器, IIR 数字滤波器或格型数字滤波器。自适应滤波分 2 个过程。第一,输入信号想 x(n) 通过参数可调的数字滤波器后得输出信号 y(n) ,y(n) 与参考信号 d(n) 进行比较得误差信号 e(n) ;第二,通过一种自适应算法和 x(n) 和 e(n) 的值来调节参数可调的数字滤波器的参数,即加权系
维纳自适应滤波器设计及Matlab实现
维纳自适应滤波器设计及Matlab实现
摘要 本文从随机噪声的特性出发,分析了传统滤波和自适应滤波基本工作原理和性能,以及滤波技术的现状和发展前景。然后系统阐述了基本维纳滤波原理和自适应滤波器的基本结构模型,接着在此基础上结合最陡下降法引出LMS算法。在MSE准则下,设计了一个定长的自适应最小均方横向滤波器,并通过MATLAB 编程实现。接着用图像复原来验证该滤波器的性能,结果表明图像的质量在MSE 准则下得到了明显的改善。最后分析比较了自适应LMS滤波和频域维纳递归滤波之间的性能。本文还对MATLAB里面的自适应维纳滤波函数wiener2进行了简单分析。 关键字:退化图像维纳滤波自适应滤波最陡下降法LMS
Abstract This paper analyses the basic work theory, performance of traditional filter and adaptive filter based on the property of random noise, and introduce the status quo and the foreground of filter technology. Then we explain basic theory of wiener filter and basic structure model of adaptive filter, and combine the method of steepest descent to deduce the LMS. Afterward according to the MSE rule, we design a limited length transversal filter, and implement by MATLAB. And then we validate performance of adaptive LMS filter by restoring images, Test result show that the quality of the degrade images were improved under the rule of MSE. Finally, we compare the performance of adaptive LMS filter and iterative wiener filter. We also simply analyses the wiener2 () which is a adaptive filter in MATLAB. Keywords: degrade image;wiener filter;adaptive filter;ADF;LMS algorithm