惯性矩与转动惯量区别

惯性矩与转动惯量的区别
在大学物理实验用共振法测量固体材料的杨氏模量的实验原理中,有涉及到惯性矩,若没有学过材料力学,可能会将此概念与普通力学中的转动惯量混淆。现就本人的理解,将这两个概念作一对比,供初学者参考。
惯性矩(截面的惯性矩的简称):(英文area moment of inertia )
定义:梁的截面积对某坐标轴的距离(也叫惯性半径)的平方的乘积叫做对某轴的惯性矩。单位是长度的四次方。梁的截面惯性矩越大,其强度和刚度越大,截面惯性矩是计算梁的挠度和转角的主要参数之一。在材料力学中用于弯曲计算。意义:是描述一个物体抵抗扭动、扭转能力的物理量。是一个用于描述截面几何
性质的量。
其中:
惯性矩(截面惯性矩):
面积元素d A 与其至x 轴或y 轴距离平方的乘积y 2d A 或x 2d A ,分别称为该面积元素对于x 轴或y 轴的惯性矩或截面二次轴矩。
如对X 轴的惯性矩:
极惯性矩(截面极惯性矩):
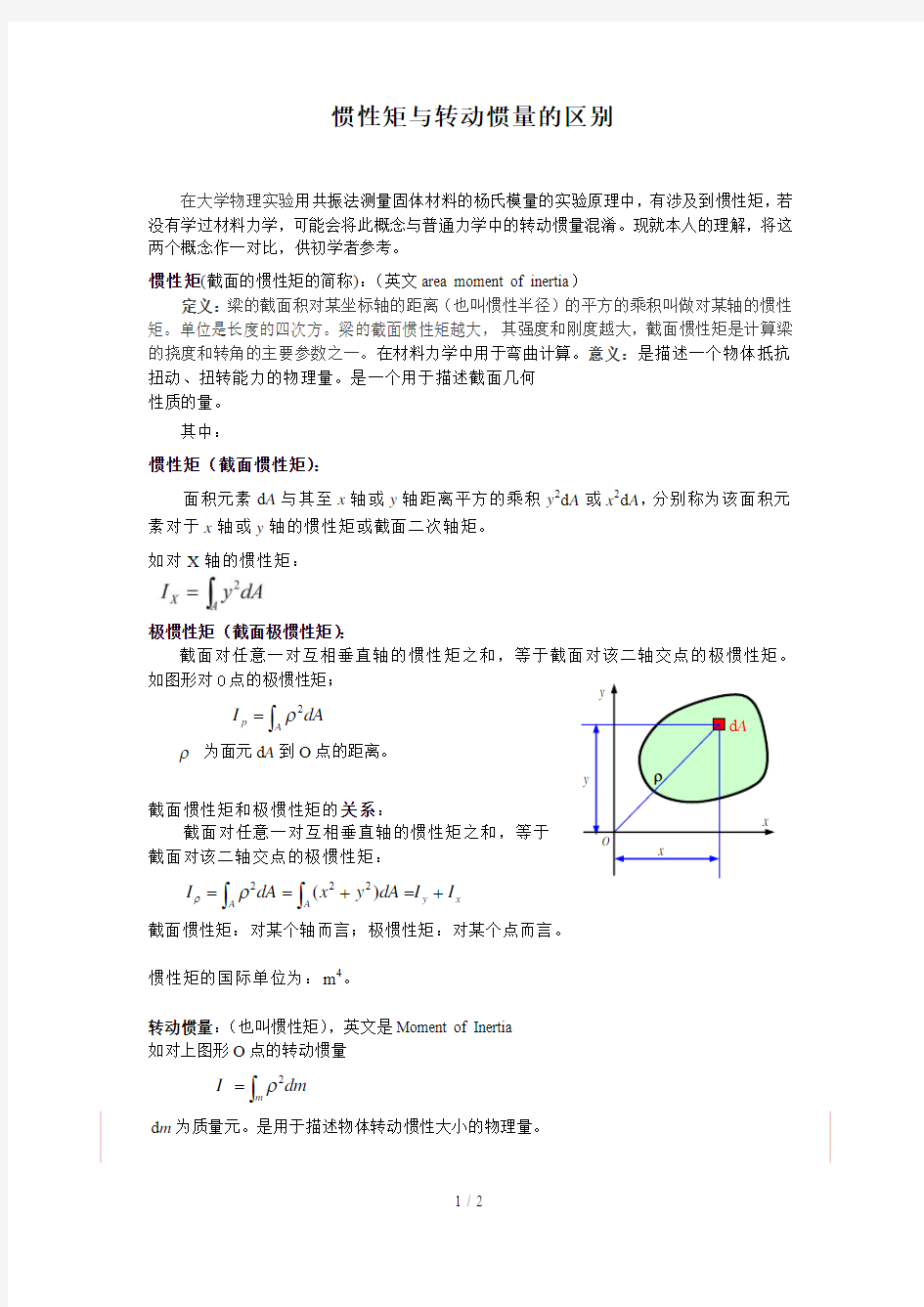
截面对任意一对互相垂直轴的惯性矩之和,等于截面对该二轴交点的极惯性矩。如图形对O 点的极惯性矩; ?=A p dA I 2
ρ ρ 为面元d A 到O 点的距离。
截面惯性矩和极惯性矩的关系:
截面对任意一对互相垂直轴的惯性矩之和,等于截面对该二轴交点的极惯性矩: x y A A I I dA y x dA I +=+==??)(2
22ρρ
截面惯性矩:对某个轴而言;极惯性矩:对某个点而言。
惯性矩的国际单位为:m 4。
转动惯量:(也叫惯性矩),英文是Moment of Inertia
如对上图形O 点的转动惯量
?=m dm I 2ρ
转动惯量
转动惯量 一、基本概念 惯量J 是一个常用的物理量,在负载被加速或减速的过程中中,是一个非常重要的参数。 转动惯量又可以称为惯性矩,它的的定义是:物体每一质点的质量m 与这一质点到旋转中心轴线的距离r 的二次方的乘积的总和,其数学表达式为: J =2 1 m 2r 。 (1) 在伺服控制系统中,大多数的传动机构具有圆柱状构件,因此,下面介绍几种圆柱状物体的转动惯量的计算。 图(1)和(2)分别描述了围绕着中心轴线旋转的空心圆柱体和实心圆柱体。 图(1)空心圆柱体 图(2)实心圆柱体 (1)空心圆柱体的转动惯量计算公式为: J =21m (21R +2 2R )[牛?米?秒2] (2) (2)实心圆柱体的转动惯量计算公式为: J =21 m 2R [牛?米?秒2] (3) 对于己知重量为G 的物体,用(G /g )代替公式(2)和(3)中的m ,g 为重力加速度,我们可以分别得到: (1)空心圆柱体的转动惯量计算公式为:
J =g R R G 2)(2 221+[牛?米?秒2] (4) (2)实心圆柱体的转动惯量计算公式为: J =g GR 22 [牛?米?秒2] (5) 如果重量不知道,但知道旋转物体的体积V 和密度γ,则可用(V γ/g )代替公/式(2)和(3)中的m ,我们可以得到: (1)空心圆柱体的转动惯量计算公式为: J = )(24142R R g L -γ π[牛?米?秒2 ] (6) (2)实心圆柱体的转动惯量计算公式为: J = 42R g L γ π[牛?米?秒2 ] (7) 二、计算 举例说明 1.换向器的惯性矩K J K J =81 .910)(322 44 -? -?K K Ki K l D D γπ [克?厘米?秒2]。 换向器的几何尺寸: 换向器的外径K D =0.6[厘米]; 换向器的内径Ki D =0.38[厘米]; 换向器的轴向长度K l =0.5[厘米]。 在几何尺寸和材料已知的情况下,换向器的惯性矩K J 为: K J =81 .910)(322 44 -? -?K K Ki K l D D γπ = =81 .9105.75.0)38.06.0(322 4 4-???-?π =4.079×510- [克?厘米?秒2], 式中,K γ是换向器材料的平均比重,取K γ≈7.5[克/厘米3]。 若惯性矩的单位采用[牛?米?秒2],则换向器的惯性矩K J 为:
惯性矩及惯性积
惯性矩及惯性积 在讨论物体的平面动力学时,需介绍对通过质心G且与运动平面垂直的轴之惯性矩I G。在三维动力分析时,有时需计算六个惯性量。这些项称为惯性矩及惯性积(moments and products of inertia),其以特殊方式描述物体相对于一已确定方向及原点的坐标系统的质量分布。 惯性矩考虑下图所示的刚体,物体的微分元素dm对三坐标轴的任一轴的惯性矩(moment of inertia)可定义为:元素的质量和此元素到该轴的最短距离的平方 之乘积。例如,如图中所标示的,故dm对x轴的质量惯性矩为 物体的质量惯性矩I xx为上式对整个物体的质量积分。因此,对各轴的惯性矩可写成 在此可看出惯性矩必为正的量,由于此量是质量dm与距离平方的乘积之和,而质量dm必为正。 惯性积微分元素dm相对于一组相互正交的两平面的惯性积(product of inertia)定义为:质量元素与至各平面的垂直(或最短)距离的乘积。例如,相对于y-z及x-z平面,上图的质量元素的惯性积dI xy为 dI xy = xydm 同时注意dI yx = dI xy。对整个质量积分,物体对各平面组合的惯性积可表示为
不像惯性矩必为正,惯性积可为正、负或零。其结果是视其定义的两个坐标的符号而定,因其符号的变化是彼此独立的。特殊情况,如质量对称于两正交平面之一或两者,则相对于此二平面的惯性积将为零,在此情况下,质量元素将成对出现于对称平面的两侧,其中一例的元素,惯性积为正,两另一例对应元素的惯性积为负,故其和为零。这种例子如下图所示。在第一种情况,图(a),y-z平面为对称平面,故I xz = I xy =0,而I yz计算的结果将为正,因所有的质量元素均位于正y及z坐标。对于图(b)所示的圆柱及坐标轴,x-z及y-z,平面均为对称平面,故I zx = I yz = I xy = 0。 平行轴与平行面定理求解物体惯性矩的积分技巧已于前面章节中讨论过。同时也曾讨论过组合物体,即由简单形状所组合成的物体的惯性矩,并表列于后封面内页。在这些情况,平行轴定理(parallel-axis theorem)常被用来计算,此定理于前面章节中导出,用来转移对通过质心G的轴的惯性矩至通过另一点的平行轴上。此时,若G点在x, y, z轴上的坐标为x G, y G, z G,如下图,则用来计算对x, y, z轴的惯性矩的平行轴方程式为 物体或组合体的惯性积的计算方式和物体的惯性矩相同。然而,此时的平行面定理就显得相当重要。此定理是用来将物体对一组通过物体质心的三正交平面的惯性积转移至另一组通过O点的三个平行面上。若平面间的垂直距离为x G, y G, z G,如下图,则平行面方程式可写成
附录II 简单均质几何体的质心、转动惯量和惯性矩
附录II 简单均质几何体的质心、转动惯量和惯性矩 物体简图质心位置转动惯量与惯性矩 细直杆z l x C y C为杆的中 点 任意三角板A B C x y z a b h AC为中线 AB的2/3 直角三角板A B C x y z a h AC为中线 AB的2/3 矩形板C x y z a b C为对角线 的中点 物体 C x 质心位置转动惯量与惯性矩
圆板C为圆心 半圆板C x y z r yC O 四分之一圆板yC r C x y z O xC 椭圆板b C x y z a C为椭圆中 心 物体简图质心位置转动惯量与惯性矩
圆柱体z r C y x h C为上、下 底圆的圆 心连线的 中点 中空圆柱 体R z r C y x h C为上、下 底圆的圆 心连线的 中点 细圆环() a z y x r C C为圆环中 心线的圆 心 物体简图质心位置转动惯量与惯性矩 粗圆环(R > r) r z y x R C C为圆环中心 线的圆心 圆锥体zC y r
球形体C y z x r C为球心 椭球体y C b z x a c C为椭球心 物体简图质心位置转动惯量与惯性矩 半圆柱体z r C y x h xC h/2 半圆锥体z r C y x h zC xC
半球 形壳 zC C y z x r 物体简图质心位置转动惯量与惯性矩 四分 之一 椭圆 板 b C x y xC a yC 扇形 板 O C x y xC r (的单位为 弧度) (的 单位为弧度) 任意三角板 细直杆 直角三角板
矩形板a r O xC c h C h h C c r h/2 xC r zC yC
惯性矩与转动惯量的区别
惯性矩与转动惯量的区别 The Standardization Office was revised on the afternoon of December 13, 2020
惯性矩与转动惯量的区别 在大学物理实验用共振法测量固体材料的杨氏模量的实验原理中,有涉及到惯性矩,若没有学过材料力学,可能会将此概念与普通力学中的转动惯量混淆。现就本人的理解,将这两个概念作一对比,供初学者参考。 惯性矩(截面的惯性矩的简称):(英文area moment of inertia ) 定义:梁的截面积对某坐标轴的距离(也叫惯性半径)的平方的乘积叫做对某轴的惯性矩。单位是长度的四次方。梁的截面惯性矩越大,其强度和刚度越大,截面惯性矩是计算梁的挠度和转角的主要参数之一。在材料力学中用于弯曲计算。意义:是描述一个物体抵抗扭动、扭转能力的物理量。是一个用于描述截面几何 性质的量。 其中: 惯性矩(截面惯性矩): 面积元素d A 与其至x 轴或y 轴距离平方的乘积y 2d A 或x 2d A ,分别称为该面积元素对于x 轴或y 轴的惯性矩或截面二次轴矩。 如对X 轴的惯性矩: 极惯性矩(截面极惯性矩): 截面对任意一对互相垂直轴的惯性矩之和, 等于截面对该二轴交点的极惯性矩。如图形对O 点的极惯性矩; x y d A x y O
?=A p dA I 2ρ ρ 为面元d A 到O 点的距离。 截面惯性矩和极惯性矩的关系: 截面对任意一对互相垂直轴的惯性矩之和,等于截面对该二轴交点的极惯性矩: x y A A I I dA y x dA I +=+==??)(222ρρ 截面惯性矩:对某个轴而言;极惯性矩:对某个点而言。 惯性矩的国际单位为:m 4。 转动惯量:(也叫惯性矩),英文是Moment of Inertia 如对上图形O 点的转动惯量 ?=m dm I 2 ρ
惯性矩的定义和计算公式
惯性矩的定义 ●区域惯性矩-典型截面I ●区域惯性矩,一个区域的惯性矩或典型截面轮廓的第二个区域惯性矩 ●面积惯性矩或面积惯性矩-也称为面积二阶矩-I,是用于预测梁的挠度、弯曲和 应力的形状特性。 ●面积惯性矩-英制单位 ●inches4 ●面积惯性矩-公制单位 ●mm4 ●cm4 ●m4 ●单位转换 ● 1 cm4 = 10-8 m4 = 104 mm4 ● 1 in4 = 4.16x105 mm4 = 41.6 cm4 ●示例-惯性单位面积矩之间的转换 ●9240 cm4 can be converted to mm4 by multiplying with 104 ●(9240 cm4) 104 = 9.24 107 mm4 ●区域惯性矩(一个区域或第二个区域的惯性矩) ● ●绕x轴弯曲可表示为 ●I x = ∫ y2 dA (1) ●其中
●I x =与x轴相关的惯性矩面积(m4, mm4, inches4)●y =从x轴到元件dA的垂直距离(m, mm, inches)●dA =基元面积(m2, mm2, inches2) ●绕y轴弯曲的惯性矩可以表示为 ●I y = ∫ x2 dA (2) ●其中 ●I x =与y轴相关的惯性矩面积(m4, mm4, inches4)●x =从轴y到元件dA的垂直距离(m, mm, inches)●典型截面I的面积惯性矩 ●典型截面II的面积惯性矩 ●实心方形截面 ● ●实心方形截面的面积惯性矩可计算为 ●I x = a4 / 12 (2) ●其中 ● a = 边长(mm, m, in..) ●I y = a4 / 12 (2b) ●实心矩形截面
转动惯量
转动惯量引自百度百科本词条由“科普中国”科学百科词条编写与应用工作项目审核。 转动惯量(MomentofInertia)是刚体绕轴转动时惯性(回转物体保持其匀速圆周运动或静止的特性)的量度,用字母I或J表示。[1]在经典力学中,转动惯量(又称质量惯性矩,简称惯距)通常以I或J表示,SI单位为kg·m2。对于一个质点,I=mr2,其中m是其质量,r是质点和转轴的垂直距离。转动惯量在旋转动力学中的角色相当于线性动力学中的质量,可形式地理解为一个物体对于旋转运动的惯性,用于建立角动量、角速度、力矩和角加速度等数个量之间的关系。 中文名 转动惯量 外文名 MomentofInertia 表达式 I=mr2 应用学科 物理学 适用领域范围 刚体动力学 适用领域范围 土木工程
基本含义 质量转动惯量 其量值取决于物体的形状、质量分布及转轴的位置。刚体的转动惯量有着重要的物理意义,在科学实验、工程技术、航天、电力、机械、仪表等工业领域也是一个重要参量。电磁系仪表的指示系统,因线圈的转动惯量不同,可分别用于测量微小电流(检流计)或电量(冲击电流计)。在发动机叶片、飞轮、陀螺以及人造卫星的外形设计上,精确地测定转动惯量,都是十分必要的。 转动惯量只决定于刚体的形状、质量分布和转轴的位置,而同刚体绕轴的转动状态(如角速度的大小)无关。形状规则的匀质刚体,其转动惯量可直接用公式计算得到。而对于不规则刚体或非均质刚体的转动惯量,一般通过实验的方法来进行测定,因而实验方法就显得十分重要。转动惯量应用于刚体各种运动的动力学计算中。 转动惯量的表达式为 若刚体的质量是连续分布的,则转动惯量的计算公式可写成 (式中表示刚体的某个质元的质量,r表示该质元到转轴的垂直距离,ρ表示该处的密度,求和号(或积分号)遍及整个刚体。)[2] 转动惯量的量纲为,在SI单位制中,它的单位是。 此外,计算刚体的转动惯量时常会用到平行轴定理、垂直轴定理(亦称正交轴定理)及伸展定则。 面积转动惯量 有实际应用价值的只是平面积的转动惯量,平面积A对平面内互相垂直的x和y轴的转动惯量分别为和,式中x,y为面元d A的位置坐标。平面积A对于通过x,y轴交点并同它们互相垂直的z轴的转动惯量(又称极转动惯量)为: 式中为面元d A至z轴的垂直距离(见截面的几何性质)。面积转动惯量常用的单位有厘米和等。 描述面积绕同它垂直的互相平行诸转轴的转动惯量之间的关系有如下的平行轴定理:面积对于一轴的转动惯量,等于该面积对于同此轴平行并通过形心之轴的转动惯量加上该面积同两轴间距离平方的乘积。由于和式的第二项恒大于零,因此面积绕过形心之轴的转动惯量是绕该束平行轴诸转动惯量中的最小者。[3]
solidworks质量特征:转动惯量、惯性张量
solidworks质量特征:转动惯量、惯性张量 转动惯量、惯性张量 solidworks中惯性主轴、惯性力矩、惯性张量 惯性主轴的定义:定义1:三条相互垂直的坐标轴,其中构件惯性积等于零的某一坐标轴。定义2:对通过物体一给定点的每组笛卡尔坐标轴,该物体的三个惯性积通常不等于零,若对于某一上述的坐标轴物体的惯性积为零,则这种特定的坐标轴称为主惯性轴。 惯性积:构件中各质点或质量单元的质量与其到两个相互垂直平面的距离之乘积的总和。 惯性力矩就是转动惯量。 转动惯量严格定义是一个物体上,它的每一极小块乘以那一小块到转动中心的距离的平方,再把乘积都加和起来就是转动惯量。K=mr^2。俗称惯性矩。惯性矩俗称惯性力距,惯性力矩。 惯性张量的定义:相对于固定在构件上的坐标轴系统,它是一个对称矩阵,其元素是三个转动惯量和三个惯性积的负值。通俗点就是,对主轴转动惯量=惯性张量矩阵的三个特征值 ***********************三者关系******************** 对主轴的转动惯量=惯性张量矩阵的三个特征值 由惯性张量如何求惯性力矩? 对于惯性张量的换算,主要是坐标变换,也就是二次型。C^T A C=B ,C就是坐标的过度矩阵。C是正交阵。不过一般都是往对角阵变换。即由三个转动惯量构成的对角阵。 对称阵A合同对角阵B,这个对角阵由A的三个特征值组成。所以惯性张量A可以坐标变换成B(由A的三个特征值组成),这特征值也就是刚体对三个主轴的转动惯量。 由惯性张量如何求惯性主轴? 1、用矩阵找惯性主轴。惯性张量矩阵里面,除了转动惯量外,其余叫惯性积,比如Ixy 等等。通过矩阵变换令惯性积为0,可以得到惯性主轴。因为旋转刚体围绕惯性主轴转动,惯性积就为0,此时只考虑转动惯量(惯性力矩)。一般的运动是围绕惯性主轴的。 2、简单点的几何法,对称轴是主轴,垂直于对称面的也是主轴,两轴为主轴,第三轴必为主轴。过质心的是中心主轴。 1由重心决定,对齐输出坐标系 把输出坐标系的原点移到重心形成新的坐标系A,计算在坐标系A中的惯性张量。简单的说就是绕重心的质量特性。 2由输出坐标系决定 在输出坐标系中计算惯性张量。
等效转动惯量
由上看出,转化法的关键是确定等效转动惯量Jv和等效力矩Mv,也即是机械中各构件质量的转化和外力的转化。 比较式(10.2.1-2)和式(10.2.1-5)可知,为保证是“等效”的转化,必须遵守以下两个原则:动能相等原则转化件的等效转动惯量所具有的动能应与原机械的总动能相等。 功率相等原则转化件的等效力矩所作的元功(或瞬时功率)应与原机械上作用的全部外力所作的元功(或瞬时功率)相等。 由此可写出等效转动惯量Jv和等效力矩Mv的普遍公式。 按动能相等的原则,列出转化件与一般机械的动能等式 由此得 (10.2.2-1) (10.2.2-2) 式中ω───—转化件的角速度; n ───机械中的活动构件数; i ───构件号; m i───第i构件的质量; v si───第i构件质心的速度。 ───第i构件的移动动能;J si───第i构件绕质心的转动惯量;ωi───第i构件的角速度; ───第i构件的转动动能; 由式(10.2.2-2)看出,Jv总是为正。 按功率相等的原则,列出转化件与一般机械上作用外力的功率等式 (10.2.2-3) 由此得 (10.2.2-4) 式中Pi ───作用在第i构件上的力; vi ───第i构件上力Pi作用点的速度; ai ───力Pi方向与速度vi方向的夹角; Mi ───作用在第i构件上的力矩; wi ───第i构件的角速度。 思考题 在式(10.2.2-4)中如何反应出作用在第i构件上力Pi或力矩Mi为驱动力还是工作阻力? 夹角ai<90°,(Pivicosai)为正,说明Pi为驱动力。反之,ai>90°,(Pivicosai)为负,则Pi为工作阻力。 若Mi方向与wi同向,则Mi为驱动力矩,Mi、wi乘积前取“+”号;反之,取“-”
质量惯矩(即转动惯量)的计算
桥梁结构动力分析中质量惯性矩的定义及计算 赵凯 李永乐 (西南交通大学桥梁工程系,四川成都,610031,lele@https://www.360docs.net/doc/375669314.html, ) 1. 概 念 1.1 定义 质量惯性矩(或称质量惯矩,转动惯量)是刚体动力学里的一个重要概念,与质量具有同等重要的地位。质量惯性矩为空间中质量关于距离的二次矩。 对于离散质点系,它对空间任意一条直线z 的质量惯矩表示为: 21 n z i i i J m r ==∑ 式中,m i 是第i 个质量块质量,r i 表示第i 个质量块到直线z 的距离。 对于连续体,则需用积分表示:2z J r dm =∫ 1.2 几何意义 由定义表达式可见,质量惯矩的大小不仅与质量大小有关,而且与质量的分布情况有关。在国际单位制中单位为kg·m 2。质量惯矩越大,则表示质量分布离z 轴越远。若设想刚体的质量集中于离z 轴距离为ρz 处,令2z z J m ρ=,则 z ρ= 称之为对z 轴的回转半径。显然,它代表质量分布到z 轴距离的一种“平均”。物体的质量惯矩等于该物体的质量与回转半径平方的乘积。 1.3 物理意义 理论力学中有关于刚体运动的两个重要定理,分别是 动量定理: 22d y m F dt =∑ 动量矩定理:22()z z d J M F dt ? =∑ 这两个定理分别描述刚体曲线运动和绕定轴的转动运动规律。动量定理表示质量为物体运动惯性的一种度量。类似地,由动量矩定理可见,力矩大,转动角加速度大;如力矩相同,刚体质量惯矩大,则角加速度小,反之,角加速度大。
可见,质量惯性矩的大小表现了物体转动状态改变的难易程度,即:质量惯矩是转动惯性的度量。若将转动与位移类比,力矩与力类比,则转动惯矩对应于质量。 1.4 质量惯性矩 VS 截面极惯性矩 截面极惯性矩表示平面上面积区域关于距离的二次矩,表示为: 2p i X Y I r dA I I ==+∫ 材料力学推导了悬臂梁的扭转公式, p Tl GI ?= 因此,极惯性矩是截面抗扭能力的一种度量,代表转动刚度,而质量惯性矩代表了转动惯性。前一个属静力学范畴,后一个主要应用于动力学。 2. 桥梁结构动力学中的应用 结构动力学分析中常常采用集中质量法,假定全部质量聚集在计算平动位移的点上,如图所示。结构运动微分方程一般表示为如下形式: 2(2)()m y y y F t ξωω++=&&& 对于图示结构,假如各质量点均不会发生绕自身的面外转动(扭转),或者没有质量惯性矩,则质量矩阵中仅包含集中质量,位移矩阵也没有面外转动项。因为质量惯性矩是扭转振动的一个重要特征参数,没有质量惯矩,动力特性分析将得不到扭转振型。但是,工程结构如桥梁的动力计算考虑扭转常常是必须的。这时候就应该计算质量惯矩以计入扭转振型。扭转振动方程为: () ()t M J αααααωαωζα=++2 2&&& 又因为质量惯矩的计算取决于质量分布,截面特性不能反映此信息,所以必 须单独指定梁的质量惯矩。采用有限元建模,常常采用添加质量点方法(如ANSYS 中mass21单元,MSC.MARC 中的point mass ,Midas 中的节点质量等)。质量点可以设置在单元节点位置,实际建模中先计算主梁单位长度(每延米)质量惯矩,再根据单元长度确定质量点对应的质量惯矩。ANSYS 分析中质量矩阵形式的选择应特别小心,当采用一致质量矩阵时,ANSYS 会自动计算质量惯矩,该计算结果对于桥梁来说一般是不合适的,因此建议ANSYS 分析中采用集中质量矩阵,通过添加质量点的方法考虑质量惯矩。此外需注意的是,上述添加质量点的方法主要应用于单主梁模拟,对于多主梁模型的情况应特别小心,可能需要仔细的力学行为分析。以下例子都是基于单主梁模型的。
转动惯量
惯性主轴的定义:定义1:三条相互垂直的坐标轴,其中构件惯性积等于零的某一坐标轴。定义2:对通过物体一给定点的每组笛卡尔坐标轴,该物体的三个惯性积通常不等于零,若对于某一上述的坐标轴物体的惯性积为零,则这种特定的坐标轴称为主惯性轴。 惯性积:构件中各质点或质量单元的质量与其到两个相互垂直平面的距离之乘积的总和。 惯性力矩就是转动惯量。 转动惯量严格定义是一个物体上,它的每一极小块乘以那一小块到转动中心的距离的平方,再把乘积都加和起来就是转动惯量。K=mr^2。俗称惯性矩。惯性矩俗称惯性力距,惯性力矩。 惯性张量的定义:相对于固定在构件上的坐标轴系统,它是一个对称矩阵,其元素是三个转动惯量和三个惯性积的负值。通俗点就是,对主轴转动惯量=惯性张量矩阵的三个特征值 ***********************三者关系******************** 对主轴的转动惯量=惯性张量矩阵的三个特征值 由惯性张量如何求惯性力矩? 对于惯性张量的换算,主要是坐标变换,也就是二次型。C^T A C=B ,C就是坐标的过度矩阵。C 是正交阵。不过一般都是往对角阵变换。即由三个转动惯量构成的对角阵。 对称阵A合同对角阵B,这个对角阵由A的三个特征值组成。所以惯性张量A可以坐标变换成B(由A的三个特征值组成),这特征值也就是刚体对三个主轴的转动惯量。 由惯性张量如何求惯性主轴? 1、用矩阵找惯性主轴。惯性张量矩阵里面,除了转动惯量外,其余叫惯性积,比如Ixy 等等。通过矩阵变换令惯性积为0,可以得到惯性主轴。因为旋转刚体围绕惯性主轴转动,惯性积就为0,此时只考虑转动惯量(惯性力矩)。一般的运动是围绕惯性主轴的。 2、简单点的几何法,对称轴是主轴,垂直于对称面的也是主轴,两轴为主轴,第三轴必为主轴。过 质心的是中心主轴。 1由重心决定,对齐输出坐标系 把输出坐标系的原点移到重心形成新的坐标系A,计算在坐标系A中的惯性张量。简单的说就是绕 重心的质量特性。 2由输出坐标系决定 在输出坐标系中计算惯性张量。
惯性矩比
惯性矩比 电机的惯性矩是指转子的惯性矩,可以这样说,惯性矩大的物体,用同样大小的转矩去使其转动到一定的转速需要的时间相对于惯性矩小的物体就要长。负载与电机的惯性矩比代表了电机的电磁转矩用于启动电机转子的量与用于启动负载的量的比值。在伺服系统的设计分析中用到这个量。 即便在电机的齿槽转矩较大或在负载机械系统中出现共振的时候也能够估计负载惯量:在加速反馈信号中检测振动,当检测到的振动等于或高于预定水平的时候,用系数α=0或0<α<1去乘以估计惯量增益K;当检测到的振动低于预定水平时,用α =1去乘以估计惯量增益K。 惯性比主要是为了满足电机与负载的匹配。为了避免小马拉大车或大马拉小车。根据经验,负载与电机惯量比为5:1左右。 “惯性矩比”和“转动惯量比”两个比值对于一个物体是一样的。 a、负载的转动惯量与电机的转动惯量通过传动装置连成一个整体,只是在启动或停止瞬间有冲击问题,如果链接良好,这种冲击可忽略; b、如果链接不好,这种冲击不可忽略,那么这种冲击的危害与负载的转动惯量是电机的转动惯量的倍数有关系,倍数越大,冲击越厉害; c、冲击意味着转子速度的巨烈变化,意味着瞬时转差率S的变化,意味着变频器输出电流的变化,最终影响或导致变频器的保护! d、在启动或停止过程中,负载的转动惯量和电机的转动惯量对系统的影响具有相同的性质,是叠加的关系,只要总惯量相同,负载的转动惯量是电机的转动惯量的多少倍没有关系; e、至于对电机定位控制精度的影响,那就成为另外的问题。
要求高速高响应时,惯量比不宜过高,比如机床,一般负载惯量为电机转子惯量的2倍以内,甚至0.5倍以内。惯量比太大可以认为是小马拉大车,很难拖动大惯量的负载进行高动态的动作;而惯量比小于1的时候是着眼于力矩的输出,不过最终目的往往着眼于系统加(减)速能力,或曰快速性,而非绝对速度,有大马拉小车的嫌疑,是为了做所谓的“轻快的动作”(即高响应),而且也更加挑战驱动器的灵敏度,只是价格高昂。因此,在可以满足响应的条件下,不必片面追求惯量比。 对于伺服驱动器而言,惯量比只是为了在电流与加速度之间建立联系,进而保证速度环的响应而已。因为伺服的电流环通常不开放给用户,只是在驱动器内部自己处理,它能正常处理的范围,就是这个伺服可接受的惯量比范围了。 对于多数伺服而言,为保证算法对具体物理对象的适应性,往往采用标么化设计,因而伺服上能看到的不是带量纲的总惯量,而是无量纲的惯量比。对于系统设计和电机选型而言,真正有意义的是总惯量,而不是惯量比,因此,关注点必须从系统总惯量出发,为保证所需的响应能力,选取合适的“系统/电机惯量”之比,以及“出力/总惯量”比,亦即系统加速度,{(扭矩-阻力矩)/总惯量}与加速度成正比关系。 每款伺服电机都有自己的力矩特性,电流与扭矩大致是正比关系,
solidworks质量特征:转动惯量、惯性张量
袆solidworks质量特征:转动惯量、惯性张量 蚄转动惯量、惯性张量 袁solidworks中惯性主轴、惯性力矩、惯性张量 荿惯性主轴的定义:定义1:三条相互垂直的坐标轴,其中构件惯性积等于零的某一坐标轴。定义2:对通过物体一给定点的每组笛卡尔坐标轴,该物体的三个惯性积通常不等于零,若对于某一上述的坐标轴物体的惯性积为零,则这种特定的坐标轴称为主惯性轴。 芇惯性积:构件中各质点或质量单元的质量与其到两个相互垂直平面的距离之乘积的总和。 肂 蚀惯性力矩就是转动惯量。 荿转动惯量严格定义是一个物体上,它的每一极小块乘以那一小块到转动中心的距离的平方,再把乘积都加和起来就是转动惯量。K=mr^2。俗称惯性矩。惯性矩俗称惯性力距,惯性力矩。 莄 螄惯性张量的定义:相对于固定在构件上的坐标轴系统,它是一个对称矩阵,其元素是三个转动惯量和三个惯性积的负值。通俗点就是,对主轴转动惯量=惯性张量矩阵的三个特征值 葿 葿 螅***********************三者关系******************** 芁对主轴的转动惯量=惯性张量矩阵的三个特征值 蒂 蕿由惯性张量如何求惯性力矩? 膆对于惯性张量的换算,主要是坐标变换,也就是二次型。C^T A C=B ,C就是坐标的过度矩阵。C是正交阵。不过一般都是往对角阵变换。即由三个转动惯量构成的对角阵。
羃对称阵A合同对角阵B,这个对角阵由A的三个特征值组成。所以惯性张量A可以坐标变换成B(由A的三个特征值组成),这特征值也就是刚体对三个主轴的转动惯量。 芀由惯性张量如何求惯性主轴? 虿1、用矩阵找惯性主轴。惯性张量矩阵里面,除了转动惯量外,其余叫惯性积,比如Ixy 等等。通过矩阵变换令惯性积为0,可以得到惯性主轴。因为旋转刚体围绕惯性主轴转动,惯性积就为0,此时只考虑转动惯量(惯性力矩)。一般的运动是围绕惯性主轴的。 薆2、简单点的几何法,对称轴是主轴,垂直于对称面的也是主轴,两轴为主轴,第三轴必为主轴。过质心的是中心主轴。 莁 罿1由重心决定,对齐输出坐标系 蝿把输出坐标系的原点移到重心形成新的坐标系A,计算在坐标系A中的惯性张量。简单的说就是绕重心的质量特性。 羇2由输出坐标系决定 膃在输出坐标系中计算惯性张量。